المحتويات
- طائرة بدون طيار DIY: الدرس 1. المصطلحات.
- طائرة بدون طيار افعلها بنفسك: الدرس 2. الإطارات.
- طائرة بدون طيار افعلها بنفسك: الدرس 3. محطة طاقة.
- طائرة بدون طيار افعلها بنفسك: الدرس 4. جهاز التحكم بالطيران.
- طائرة بدون طيار افعلها بنفسك: الدرس 5. التجميع.
- طائرة بدون طيار تعمل بنفسك: الدرس 6. فحص الأداء.
- طائرة بدون طيار DIY: الدرس 7. FPV والمسافة.
- افعل ذلك بنفسك بدون طيار: الدرس 8. الطائرات.
مقدمة
تدرس الدروس الستة الأولى اعتبارات التصميم وراء إنشاء طائرة بدون طيار / بدون طيار متعددة المحركات مخصصة. لا يغطي الدرس 7 جوانب التجميع ، ولكنه يصف عددًا من الملحقات / الأجهزة الإضافية المستخدمة لتنفيذ رحلة الشخص الأول (FPV) والتحكم بعيد المدى. تركز هذه المقالة بشكل أكبر على استخدام التحكم اللاسلكي في "المجال" ؛ على عكس الطيران في الداخل أو في المواقع حيث يمكن للمنافذ توفير الطاقة. يرجى ملاحظة أن هذا البرنامج التعليمي لا يغطي سوى جزء صغير جدًا من المعلومات المطلوبة لفهم أنظمة FPV / طويلة المدى بشكل صحيح ، ويهدف بشكل أساسي إلى تعريف القارئ بالمفاهيم والمصطلحات والمنتجات والمبادئ الكامنة وراء FPV والتحكم بعيد المدى بدون طيار.
عرض الشخص الأول (FPV)
يُعد عرض الشخص الأول (FPV) أحد القوى الدافعة الرئيسية وراء الشعبية المتزايدة بسرعة للطائرات بدون طيار متعددة المحركات ، مما يتيح لك الحصول على منظور مختلف تمامًا ("منظر عين الطائر") لكوكبنا والإحساس بالتحليق. في حين أن إضافة كاميرا إلى طائرة بدون طيار ليس بالأمر الجديد ، إلا أن سهولة التحكم النسبية والسعر المنخفض ومجموعة واسعة من الطائرات بدون طيار تجعل من السهل شراء أو بناء طائرة بدون طيار بكاميرا.
يتم تنفيذ عرض الشخص الأول (FPV) حاليًا باستخدام ترادفي مثبت مسبقًا على الطائرة ، ويتألف من كاميرا FPV وجهاز إرسال فيديو ، مما يسمح بإرسال فيديو في الوقت الفعلي إلى الطيار أو المساعد. يرجى ملاحظة أن هناك أنظمة FPV جاهزة أو نصف منتهية في السوق ، حيث توفر أنظمة FPV الجاهزة للمستخدم الثقة في أن جميع عناصرها متوافقة مع بعضها البعض.
كاميرا فيديو
- تقريبًا يمكن استخدام أي كاميرا فيديو لديها القدرة على الاتصال بجهاز إرسال فيديو تنفيذ رحلة FPV ، ومع ذلك ، من المهم مراعاة الوزن ، حيث تكافح الطائرات بدون طيار متعددة المحركات باستمرار مع الجاذبية وتفتقر إلى مزايا الطائرات المجنحة لتوفير رفع إضافي.
- تأتي كاميرات الفيديو في مجموعة متنوعة من الأشكال والأحجام ، ويمكن أن يكون لها أيضًا إمكانات مختلفة في جودة التصوير ، ومع ذلك ، في الوقت الحالي ، يتم تكييف عدد قليل جدًا منها خصيصًا للطائرات بدون طيار.نظرًا لهذه القيود في الحجم والوزن والأداء ، فإن معظم الكاميرات المستخدمة في أنظمة FPV متعددة المحركات تأتي من "كاميرات الحركة" بالإضافة إلى CCTV والتطبيقات الأمنية (مثل الكاميرات الخفية).
- يشيع استخدام الكاميرات الكبيرة مثل DSLR (SLR) أو كاميرات الفيديو الكبيرة من قبل المحترفين ، ولكن نظرًا لوزنها ، تميل الطائرة بدون طيار إلى أن تكون كبيرة جدًا.
- يمكن تشغيل بعض كاميرات الفيديو مباشرة من مصدر طاقة بجهد 5 فولت (مفيد لأن معظم وحدات التحكم في الطيران تعمل أيضًا بجهد 5 فولت عند تشغيلها بواسطة BEC) ، بينما قد يتطلب البعض الآخر 12 فولت أو حتى بطارية مدمجة قابلة لإعادة الشحن.
- الكاميرا الأكثر شيوعًا المستخدمة حاليًا في الطائرات بدون طيار متعددة المحركات هي GoPro. ويرجع ذلك إلى متانتها وصغر حجمها وجودة فيديو / صورة عالية وبطارية مدمجة ومجموعة واسعة من الملحقات وتوافرها في جميع أنحاء العالم. تحتوي كاميرات GoPro أيضًا على مخرج USB يمكن استخدامه لنقل الفيديو ، وبعضها يحتوي على شبكة WiFi مضمنة لنقل الفيديو لمسافات قصيرة.
- نظرًا لنجاح GoPro ، قام العديد من الشركات المصنعة الأخرى بإنشاء خط مماثل من كاميرات الرياضة / الحركة ، لكن المواصفات والسعر والجودة تختلف. يرجى ملاحظة أنه إذا كنت تحتاج إلى فيديو ثلاثي الأبعاد ، فستحتاج إلى كاميرتين و VTX قادرة على إرسال إشارتين.

Gimbal
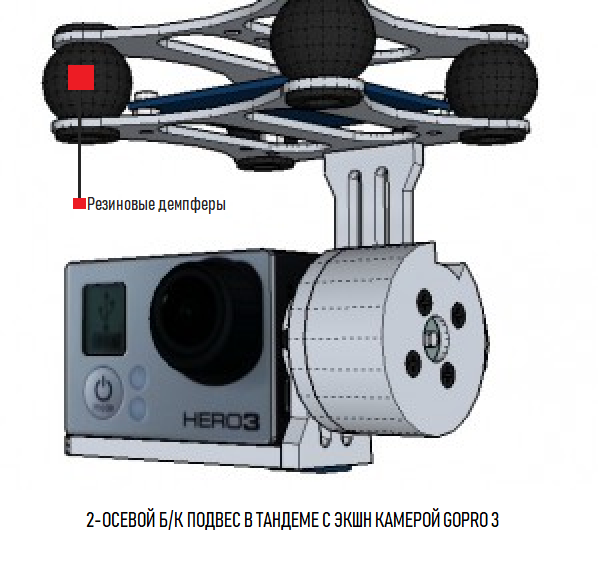
يتضمن Gimbal إطارًا ميكانيكيًا ، ومحركين أو أكثر (عادةً ما يصل إلى ثلاثة للغسل ، والإمالة ولفائف) ، وكذلك أجهزة الاستشعار والإلكترونيات. تم تركيب الكاميرا بحيث لا تضطر المحركات إلى توفير القوة الزاوية (عزم الدوران) لإبقاء الكاميرا في زاوية ثابتة ("متوازنة").
تسمح لك المحاور المعنية بتحريك الكاميرا أو إمالتها أو تحريكها. يمكن اعتبار النظام أحادي المحور الذي لا يحتوي على مستشعر خاص به على أنه نظام تحريك أو إمالة. يتضمن التصميم الأكثر شيوعًا إعداد محرك مزدوج (عادة ما تكون محركات BLDC مصممة خصيصًا للاستخدام مع المحاور) التي تتحكم في إمالة الكاميرا وتحريكها. وبالتالي ، تكون الكاميرا دائمًا في مواجهة مقدمة الطائرة بدون طيار ، مما يضمن أيضًا عدم ارتباك الطيار إذا كانت الكاميرا في اتجاه واحد ومقدمة الطائرة في الاتجاه الآخر.
يضيف المحور ثلاثي المحاور التحريك (يسارًا ويمينًا) وهو أكثر فائدة بالترادف مع اثنين من المشغلين ، حيث يقوم أحدهما بتشغيل الطائرة بدون طيار والآخر يمكنه التحكم في الكاميرا بشكل مستقل. في هذا التكوين المكون من شخصين ، يمكن أيضًا استخدام كاميرا FPV ثانية (ثابتة) للطيار.عادة ، هناك نوع واحد من نوعين من أنظمة gimbal:
محرك بدون فرش
- محرك تيار مباشر بدون فرش (BLDC) أو محرك مغناطيسي دائم متزامن (PMSM) أو (محرك الصمامات (VD))) - يوفر استجابة سريعة بأقل اهتزاز ، ولكنه يتطلب وحدة تحكم DC منفصلة (ومخصصة).
- للحفاظ تلقائيًا على مستوى الكاميرا ، يتم تثبيت وحدة قياس بالقصور الذاتي (IMU) ، تتكون من مقياس تسارع وجيروسكوب ، في مكان ما حول الكاميرا (عادةً أسفل حامل الكاميرا) بحيث يكون موضع يمكن تعقب الكاميرا (بالنسبة إلى الأرض). يتم إرسال القراءات من الكتلة إلى لوحة تحكم منفصلة بدون فرش (غالبًا ما يتم تركيبها مباشرة فوق المحور) والتي تقوم بتدوير المحركات بحيث تظل الكاميرا في اتجاه معين على الرغم من أي حركة للطائرة بدون طيار.
- تشتمل لوحة التحكم نفسها على متحكم مدمج. يمكن عادةً توصيل وحدة تحكم DC بدون فرشات gimbal مباشرة بالقناة الموجودة على جهاز الاستقبال (على عكس وحدة التحكم في الطيران) ، نظرًا لأنها تستجيب للتغيرات في اتجاه الكاميرا ، وليس اتجاه الطائرات بدون طيار ، وبالتالي لا تعتمد على وحدة التحكم في الرحلة.
- يرجى ملاحظة أنه نظرًا لأن GoPro هي كاميرا حركة شائعة ، فإن معظم المحاور الخالية من الفرشاة مصممة لاستخدامها مع واحد أو أكثر من طرازات GoPro (بناءً على حجم GoPro ومركز الثقل وموقع الكاميرا وما إلى ذلك). ستلاحظ أيضًا أن محاور BLDC دائمًا ما تحتوي على التخميد الذي يقلل الاهتزاز الذي ينتقل من الطائرة بدون طيار إلى الكاميرا.
محور تحكم مؤازر RC
- في قلب أجهزة المحاكاة المؤازرة RC - تميل محركات الأقراص المؤازرة إلى تقديم أوقات استجابة أبطأ من محركات الأقراص بدون فرش gimbals ، والاهتزاز المفرط. في الوقت نفسه ، تكون أنظمة المؤازرة أرخص بكثير من تلك التي لا تحتوي على فرش ، ويمكن في معظم الحالات توصيل الماكينات ثلاثية السنون مباشرة بوحدة التحكم في الرحلة ، مما يسمح لك باستخدام IMU المدمج في الكمبيوتر لتحديد المستوى بالنسبة إلى الأرض ، ثم حرك الماكينات.

جهاز إرسال الفيديو (VTX)
) يحتوي على VTX مدمج ، مما يعني أن تعديل VTX منفصل عادة ما تكون مطلوبة. تحظى VTXs المستخدمة في هواية الطائرات بدون طيار بشعبية في الوقت الحاضر لأنها خفيفة وصغيرة. يمكن استخدام VTXs الأخرى التابعة لجهات خارجية ، ولكن في هذه الحالة ، هناك بعض الاعتبارات المهمة لتوصيل الطاقة التي يجب أخذها في الاعتبار (قد تحتاج إلى تكوين إذا كان الجهاز لا يقبل الطاقة إلا من موصل "برميل") والجهد المدخل ؛ إذا كان جهاز الفيديو يعمل بجهد كهربائي غير موجود على جهازك ، فقد تحتاج إلى إلكترونيات إضافية ، مثل منظم الجهد.نادراً ما تكون VTXs التي لا تؤثر على هواية الطائرات بدون طيار مرضية من حيث الوزن أو الحجم ، وعادةً ما يتم وضعها في حقيبة واقية (وأحيانًا ثقيلة بشكل غير ضروري).
طاقة VTX
يتم تصنيف VTX عمومًا لطاقة خرج معينة ، ولكن لا ينبغي افتراض أن أي شخص يمكنه استخدام أي تصنيف للطاقة متاح في السوق. تتم مراقبة وتنظيم الترددات اللاسلكية والطاقة بعناية ، لذا يوصى بشدة بمراجعة اللوائح اللاسلكية في البلد الذي تقيم فيه.
تؤثر الطاقة التي يستهلكها جهاز VTX بشكل مباشر على النطاق الأقصى لإشاراته. في أمريكا الشمالية ، يتطلب جهاز الإرسال اللاسلكي الذي يستهلك أكثر من طاقة معينة (بالواط) أن يحصل المشغل على ترخيص من مشغل راديو هواة (HAM) لكي يعمل. على سبيل المثال ، في كندا ، يُطلب عادةً من مشغل FPV بعيد المدى اجتياز اختبار أساسي لكفاءة راديو الهواة على الأقل للعمل بالطاقة المطلوبة للتطبيقات اللاسلكية بعيدة المدى.
إذا لم تكن مؤهلاً ، يوصى بشدة باستخدام جهاز إرسال فيديو أقل من 200 ميغاواط لتجنب خطر اتخاذ إجراء قانوني (قد تتصل بك السلطات إذا كانت إشارتك تتداخل مع إشارات لاسلكية أخرى).
عادةً ما يتم توفير الطاقة لـ VTX بواسطة BEC من أحد ESCs ، والذي يشغل أيضًا بقية الأجهزة الإلكترونية. إذا كنت تشك في أن جميع الأجهزة الإلكترونية تستهلك حداثة أكثر مما يمكن أن توفره BEC ، فيمكنك استخدام BEC من ESC الثاني لتشغيل VTX. لا يوصى باستخدام بطارية منفصلة لتشغيل VTX.
ترددات / قنوات VTX
تعمل معظم VTXs على أحد الترددات المدرجة أدناه. يرجى ملاحظة أنه نظرًا لأنك ربما تستخدم بالفعل معدات تحكم قياسية تعمل بتردد معين ، فمن الحكمة تحديد VTX بحيث لا تتطابق الترددات. على سبيل المثال ، إذا كان جهاز التحكم عن بُعد يعمل بتردد 2.4 جيجا هرتز ، فيجب أن تبحث عن VTX بتردد تشغيل 900 ميجا هرتز أو 1.2 جيجا هرتز أو 5.8 جيجا هرتز.
900 ميجاهرتز (0.9 جيجاهرتز)
- يمكن للإشارات ذات التردد المنخفض أن تخترق الجدران والأشجار بسهولة أكبر. جعل لأن الترددات المنخفضة تنطوي على هوائيات كبيرة
- جودة الصورة ليست جيدة مثل 5.8 جيجا هرتز
- قد يكون لها تأثير سلبي على مستقبلات GPS
- تعتبر تقنية "قديمة"
]- الأفضل بشكل عام للمدى المتوسط
1.2 جيجاهرتز (1.2 إلى 1.3 جيجاهرتز)
- تُستخدم في رحلات FPV طويلة المدى لأنها توفر مسافة جيدة
- العديد من الهوائيات المختلفة في السوق.]
2.4 جيجا هرتز (2.3 إلى 2.4 جيجا هرتز)
- يستخدم لـ FPV عبر مسافات طويلة مع عوائق قليلة
- أحد أكثر الترددات استخدامًا في للأجهزة اللاسلكية
- تتوفر العديد من الملحقات (الهوائيات وأجهزة الإرسال وما إلى ذلك)
- لا تستخدم أجهزة إرسال RC المتوازية أو الأجهزة الأخرى التي قد تسبب تداخلًا.
- قد تعمل مع ترددات أخرى ، ولكن لن يتم تغطيتها في هذا القسم.
5.8 جيجا هرتز
- عظيم للتطبيقات قصيرة المدى
- للجدران والعوائق الأخرى تأثير كبير على المدى
- الهوائيات صغيرة / مضغوط
- الأفضل لـ FPV في سباق الطائرات بدون طيار
كما لاحظت ، تعمل العديد من الأجهزة اللاسلكية الشائعة بتردد 2.4 جيجا هرتز (أجهزة التوجيه اللاسلكية ، والهواتف اللاسلكية ، بلوتوث ، أجهزة فتح أبواب الجراج ، إلخ). هذا يرجع إلى حد كبير إلى حقيقة أن لوائح الدولة للجنة الاتصالات الفيدرالية (FCC) ، تقرر أن نطاق التردد حول هذا النطاق لا يتطلب ترخيصًا للعمل ؛ الشيء نفسه بالنسبة لـ 900 ميجا هرتز و 1.2 جيجا هرتز و 5.8 جيجا هرتز (ضمن نطاق الطاقة المحدد). يشمل نطاق التردد غير المرخص ما يسمى نطاق ISM المجاني (من النطاق الصناعي والعلمي والطب الإنجليزي: النطاق الصناعي والعلمي والطبي) ، ويحتل نطاق التردد: من 2400 إلى 2483.5 ميجاهرتز في الولايات المتحدة وأوروبا ومن 2471 إلى 2497 ميغاهيرتز في اليابان. هذا يعني أنه يمكن لأي مستهلك شراء جهاز لاسلكي يعمل على أحد هذه الترددات دون القلق بشأن اللوائح أو الإرشادات. يمكن العثور على مزيد من المعلومات حول تخصيص ترددات الراديو للهواة على ويكيبيديا.
موصلات VTX
ليست كل موصلات VTX لها نفس الموصلات ، لذلك من المهم معرفة الموصل المثبت في الكاميرا المحددة ، وكذلك معرفة ما إذا كان من الممكن الاتصال والعمل معها VTX المحدد. أكثر الموصلات شيوعًا هي الموصلات المركبة ، والموصلات المصغرة / الصغيرة ، والموصلات 0.1 بوصة (التناظرية). يوجد عدد من المحولات / المحولات في السوق ، على سبيل المثال: موصل 0.1 ″ FPV Tx - miniUSB للاستخدام مع كاميرا GoPro ، مما يبسط استخدام هذه المنتجات بشكل كبير.
قد تحتوي بعض VTXs أيضًا على إدخال صوتي ، ولكن في معظم الحالات ، ستؤدي الضوضاء الصادرة عن مجموعة نقل الحركة إلى إغراق أي صوت ترغب في تسجيله. إذا كنت بحاجة إلى صوت ، فتأكد من وضع الميكروفون بعيدًا عن المحركات قدر الإمكان (سيستغرق الأمر الكثير من الاختبارات للعثور على أقصى موقع مثالي) وحدد جهاز استقبال متوافق.
هوائي VTX
تميل هوائيات VTX المستخدمة في المركبات الجوية غير المأهولة إلى أن تكون إما "بطة" أو "سوط". هوائيات البط هي الأكثر شيوعًا وتتميز بكونها شاملة الاتجاهات ومضغوطة وغير مكلفة وتظل ثابتة أثناء الطيران بسبب شكلها الصغير.
يجب أن يتطابق اختيار الهوائي مع تردد VTX. تتطلب الترددات الأعلى هوائيات أصغر ، لكن الإشارات المرسلة تواجه صعوبة أكبر في تجاوز العوائق. الترددات المنخفضة أقل عرضة للتداخل ، ولكنها تتطلب هوائيات كبيرة / طويلة. لا يتم استخدام الهوائي الاتجاهي في كثير من الأحيان لنقل الفيديو ، حيث يمكن للطائرة بدون طيار أن تكون في الواقع في أي اتجاه في الفضاء ثلاثي الأبعاد. من الناحية المثالية ، يجب أن يكون الهوائي موجودًا في مكان ما على الطائرة بدون طيار ، حيث لا توجد مصادر لإشارات لاسلكية أخرى أو تداخل كهربائي.
مستقبل الفيديو (VRX)
يميل مستقبل الفيديو إلى أن يكون أكبر قليلاً (ماديًا) وأثقل من VTX لأن عادة ما يكون جهاز الاستقبال ثابتًا (متصلًا بشاشة) أثناء تركيب جهاز الإرسال على الطائرة بدون طيار ، وعلى هذا النحو ، يجب أن يكون صغيرًا وخفيف الوزن. لتوفير المساحة ، تقوم بعض الشركات المصنعة لشاشات الكريستال السائل بتضمين أجهزة استقبال لاسلكية ذات تردد قياسي في شاشاتها.
يستخدم العديد من عشاق FPV هوائيات Clover Leaf أو Pinwheel على نظارات FPV الخاصة بهم ، مما يسمح لهم بتوجيه رؤوسهم في اتجاه الطائرة بدون طيار لزيادة قوة الإشارة. دعمت بعض الشركات المصنعة لنظارات FPV هذا الاتجاه وبدأت في تضمين جهاز استقبال فيديو لاسلكي وهوائي في عبوة نظاراتهم الواقية.
من الواضح أن التردد الذي يعمل به مستقبل الفيديو يجب أن يتطابق مع تردد المرسل. ومع ذلك ، تقدم بعض طرز أجهزة الاستقبال مجموعة متنوعة من القنوات (واحدة تلو الأخرى) مما يجعلها متوافقة مع مجموعة متنوعة من VTXs. يميل إخراج مستقبل الفيديو إلى أن يكون مركبًا (أكثر شيوعًا) أو HDMI. ما تريد توصيله بالإخراج (عرض الفيديو) متروك لك ، وبعض الخيارات موصوفة أدناه. يتضمن تشغيل جهاز استقبال في الحقل دائمًا استخدام بطارية توفر إما جهد خرج يتطابق مع جهد التشغيل لجهاز الاستقبال ، أو بطارية متصلة بمنظم جهد لتوفير الجهد المطلوب. لاحظ أنه لا توجد مستقبلات فيديو "طويلة المدى" لأن نطاق الإشارة يعتمد على قوة جهاز الإرسال والهوائي الصحيح.

هوائي مستقبل الفيديو
يمكن أن تكون الهوائيات المستخدمة في مستقبلات الفيديو شاملة الاتجاهات (قادرة على استقبال إشارة من أي اتجاه) أو اتجاهي. الهوائيات الأكثر شيوعًا التي يمكن العثور عليها في مستقبل الفيديو هي: هوائي Duck أو Cloverleaf / Pinwheel أو ، في حالات نادرة ، اتجاهي (مثل "Yagi"). سيكون الهوائي الاتجاهي مناسبًا فقط عندما تحلق الطائرة بدون طيار في اتجاه معين بالنسبة للمشغل ، وستظل الطائرة بدون طيار دائمًا "أمام" الهوائي حتى لا تفقد الإشارة. قد تشمل المواقف استكشاف منطقة معينة (مثل حقل) أو منطقة بعيدة عن المشغل.

عرض الفيديو
شاشة LCD (شاشة LCD)
- عند التفكير في شاشة LCD ، من المهم معرفة الفرق بين شاشة LCD لسطح المكتب / الكمبيوتر أو تلفزيون LCD وتلك التي يُقصد بها أن تكون محمولة. تحتوي شاشة التلفزيون / الكمبيوتر دائمًا على موصل طاقة متوافق مع كبل طاقة الكمبيوتر القياسي (يسحب طاقة التيار المتردد مباشرة) ، مما يجعل من الصعب جدًا استخدامها مع البطارية. غالبًا ما تسحب شاشة LCD / OLED ، التي يجب أن تكون محمولة ، طاقة التيار المستمر وتتطلب محولًا خارجيًا للاتصال بالتيار الكهربائي (A / C).
- يتراوح حجم ومعدل التحديث وجودة العرض للشاشة المستخدمة لتطبيقات FPV من الشاشات الصغيرة ذات الصور المحببة التي يتم تحديثها عدة مرات في الثانية ، إلى الشاشات الكبيرة التي ، عند دمجها مع VTX الصحيح وجهاز الاستقبال ، عرض صور عالية الدقة كبيرة دون أي تأخير واضح. ضع في اعتبارك أنه يجب توصيل أي شاشة ثنائية الأبعاد تختارها بمصدر طاقة وتثبيتها ، إما داخل محطة قاعدة الطائرات بدون طيار (الموضحة أدناه) أو عن طريق توصيل شاشة FPV بجهاز التحكم.
نظارات واقية FPV
- تستخدم نظارات 2D
- يمكن أن تكون جودة الفيديو التي تقدمها نظارات FPV غير المكلفة منخفضة جدًا ، لذا إذا كانت الميزانية مهمة ، يرجى ملاحظة أنه يمكنك الحصول على تجربة أفضل من شاشة LCD أكبر بنفس سعر نظارات FPV....
تتبع الرأس
- تتبع الرأس هو في الأساس نفس تتبع الحركة ، أي قياس الاتجاه / الزوايا ثلاثية الأبعاد على عكس حركة خطية. يتكون مجمع المستشعرات من شرائح MEMS لمقياس التسارع أو الجيروسكوبات أو وحدات القياس بالقصور الذاتي (IMU).يتم تثبيت المستشعرات (أو تضمينها) في نظارات FPV / VR وإرسال البيانات إلى وحدة التحكم الدقيقة لتفسير بيانات المستشعر على أنها زوايا ، والتي ترسل البيانات بعد ذلك ، إما من خلال معدات التحكم (للنماذج المتطورة) أو من خلال جهاز إرسال لاسلكي منفصل. نظام تتبع الرأس المثالي متوافق مع جهاز الإرسال ، لذلك يمكن إرسال الزوايا مع جهاز الإرسال على قناتين RC مجانيتين.
3D / الواقع الافتراضي
- Occulus Rift و Samsung Gear و Morpheus ونظارات الواقع الافتراضي القائمة على الهواتف الذكية والعديد من نظارات 3D / الرأس الأخرى يمكن تكييف شاشات VR المُثبتة للاستخدام مع الطائرات بدون طيار. على الرغم من أن هذه الأجهزة تُصمم عادةً للألعاب ثلاثية الأبعاد للكمبيوتر / وحدة التحكم أو كبديل للتلفزيون ، فإن هذه الأجهزة متوافقة أصلاً مع ثلاثي الأبعاد وغالبًا ما تحتوي على مستشعرات لتتبع الرأس مدمجة ، مما يجعلها أكثر إثارة للاهتمام لمجتمع الطائرات بدون طيار FPV.
أجهزة ذكية
- يمكن استخدام الهواتف الذكية أو الأجهزة اللوحية أو أجهزة الكمبيوتر المحمولة لعرض الفيديو المباشر. بطارياتها مدمجة والأجهزة نفسها خفيفة الوزن. تكمن صعوبة استخدام الأجهزة الذكية في حقيقة أن معظم أجهزة الاستقبال ليست مصممة لتلقي إشارة فيديو من مستقبل فيديو لاسلكي (أحدهما سلكي أو لاسلكي). يمكن لجهاز كمبيوتر محمول أو كمبيوتر لوحي مزود ببطاقة فيديو مدمجة أو USB استقبال الفيديو المركب العادي. يعمل الهاتف الذكي حاليًا بشكل أفضل مع الفيديو المرسل عبر Wi-Fi (من شبكة Wi-Fi بالكاميرا إلى محول Wi-Fi). يعد استخدام إشارة فيديو Wi-Fi وتطبيق الهاتف المحمول من GoPro أحد أسهل الطرق لتنفيذ FPV ، ولكن تجدر الإشارة إلى أن نطاق إشارة Wi-Fi للكاميرا محدود للغاية (10-20 مترًا). نظرًا لأن الهواتف الذكية منتشرة على نطاق واسع والطائرات بدون طيار في غاية الغضب ، فإن الشركات المصنعة تطلق بانتظام منتجات جديدة يستفيدون منها ، لذا فكر مليًا قبل اتخاذ القرار.
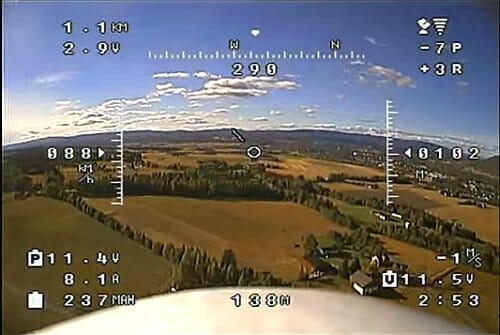
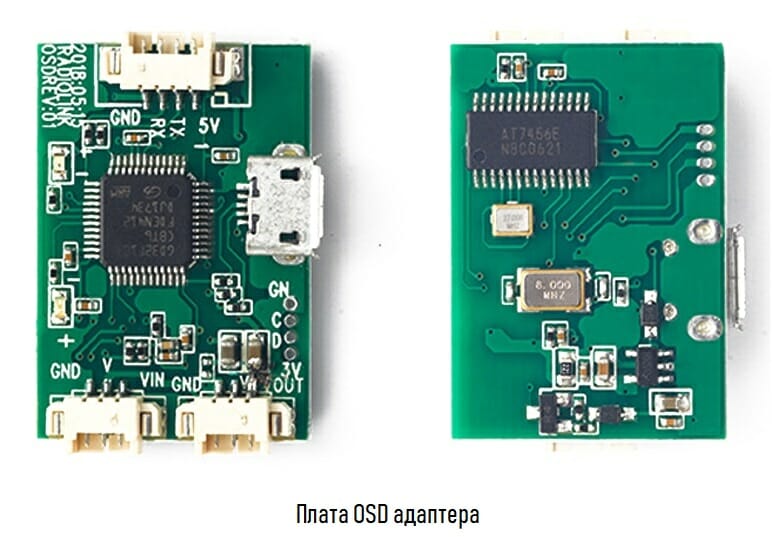
العرض على الشاشة (OSD)
- العرض على الشاشة (OSD) يسمح للطيار برؤية بيانات المستشعر المختلفة المرسلة من الطائرات. تتمثل إحدى أسهل الطرق لعرض البيانات على الشاشة في استخدام كاميرا إخراج تمثيلية ووضع لوحة عرض بين إخراج الكاميرا و VTX. تحتوي لوحة مهايئ OSD على مدخلات لأجهزة استشعار مختلفة وستقوم بتراكب البيانات على الفيديو ، لذلك سيتلقى الطيار مقطع فيديو مع بيانات القياس عن بعد متراكبة بالفعل.



اعتبارات المسافة
- على قوة المرسل (معدات التحكم ، وكذلك الفيديو ، إذا كان قابلا للتطبيق). تشتمل أجهزة إرسال RC عادةً على نظام RF يتكون من أذرع تحكم ومفاتيح وإلكترونيات وجهاز إرسال RF ومكونات RC الأقل تكلفة ، وهذا النظام دائمًا ما يكون وحدة واحدة.غالبًا ما تحتوي النماذج المتطورة على وحدة RF
الطاقة
طائرة بدون طيار / طائرة بدون طيار
تتكون الطائرة بدون طيار / الطائرة بدون طيار من عدة أجزاء مختلفة ، كل منها يتطلب جهدًا محددًا. تشمل أكثر الأجهزة الإلكترونية شيوعًا التي ستجدها في نظام FPV أو الطائرات بدون طيار بعيدة المدى:
- المحركات: تميل معظم محركات الطائرات بدون طيار متوسطة الحجم إلى العمل عند 11.1 فولت أو 14.8 فولت الخامس..
- مستقبل تتبع الرأس: سيعمل أيضًا من BEC.
- مؤازر جيمبال: يمكن تشغيل محورين مؤازر من أحد BECs إلى ESC ويعمل بجهد 5 فولت.
- محولات BLDC: يمكن توصيل بعض محولات BLDC بموصل شحن البطارية الرئيسي ، بينما قد يتطلب البعض الآخر جهدًا معينًا. تحقق من مواصفات gimbal الذي تشتريه.
- الكاميرا: تميل الكاميرات المستخدمة في رحلة FPV إلى العمل عند 5 فولت (من BEC) أو 12 فولت (البطارية الرئيسية). تحتوي معظم كاميرات الحركة على بطارية مدمجة خاصة بها.
- VTX: يعمل معظمها بجهد 5 فولت ويمكن تشغيله بواسطة BEC.
- إلكترونيات إضافية (إضاءة ، مظلة ، إلخ): 5 فولت.
يوصى بأن تحتوي الطائرة بدون طيار على بطارية رئيسية واحدة فقط ويجب أن تفكر في استخدام بطارية 11.1 فولت أو 14.8 فولت على طائرة بدون طيار متوسطة الحجم. إذا كان أكثر من ESC واحد لا يحتوي على BEC ، فستحتاج إلى منظم جهد خارجي 5V لتشغيل الإلكترونيات ، والتأكد من أنه يمكن أن يوفر تيارًا كافيًا لكل شيء.
الطيار
في حين أن متوسط مستخدم الطائرة بدون طيار يحتاج فقط إلى القلق بشأن أداء معدات التحكم ، فإن قائد منصة FPV الكاملة قد ينتهي به الأمر بحمل بطاريات كبيرة ومجموعة متنوعة من المعدات الإضافية.
- معدات التحكم المحمولة: يتم تشغيل معظم وحدات التحكم عن بعد بواسطة بطاريات "AA" (4 × AA أو 8 × AA) افتراضيًا ، ولكن FPV قد تتطلب طاقة بطارية خارجية المعدات...
- مرسل RF اختياري: إذا كنت لا تستخدم مرسل / مستقبل الترددات اللاسلكية المزود بوحدة التحكم عن بعد ، فعادةً ما يكون للطرازات المتطورة خرج طاقة يمكن توصيل هذه الوحدة به... بدلاً من ذلك ، يمكنك تشغيله ببطارية خارجية قابلة لإعادة الشحن تعمل على تشغيل جهاز التحكم عن بُعد.
- مستقبل تتبع الرأس: عادة يمكن تشغيل هذه الوحدة من 5 فولت.
- مستقبل الفيديو: تتطلب معظمها 12 فولت ، ولكن غالبًا ما يكون لها نطاق جهد دخل واسع إلى حد ما. في أغلب الأحيان ، يأتي جهاز الاستقبال مع محول طاقة لن تستخدمه في الميدان. تحقق من نطاقات جهد الدخل لمعرفة ما إذا كان يمكنك استخدام نفس الجهد لتشغيل جهاز الإرسال والاستقبال (مثل 7.4 فولت أو 12 فولت).
- عرض الفيديو: تأكد من اختيار شاشة LCD محمولة بموصل "برميل" بحيث يمكنك استخدام حزمة البطارية للإدخال. عادةً ما تحتوي نظارات FPV أيضًا على إدخال برميل ، ولكن لا تنس التحقق. الجهد الأكثر شيوعًا لشاشات LCD المحمولة هو 12 فولت ، والذي قد لا يكون الأفضل للأجهزة الأخرى.
- متعقب الهوائي: موصوف أدناه. غالبًا ما يتكون هذا الجهاز المزود بمحركات من محركات مؤازرة يتم التحكم فيها عن طريق الراديو ، ووحدة تحكم دقيقة ، وأجهزة استشعار / إلكترونيات إضافية. يوجد عدد قليل جدًا من الأنظمة التجارية لسوق الطائرات بدون طيار ، لذلك إذا قمت بتصميم وبناء مثل هذا النظام ، فستحتاج إلى تصميم إعداد للطاقة.
المحطة الأساسية
كما هو مذكور أعلاه ، هناك الكثير من المعدات التي يحتاجها الطيار للحمل والطاقة ، ويمكن أن تكون ضخمة جدًا. غالبًا ما تُستخدم المحطات الأساسية لتحرير المشغل من هذا العبء / الارتباك ويمكن أن تتكون من أي عدد من المعدات والمقصورات المختلفة المدرجة أدناه. ليس من الصعب تخيل أن نتيجة التحضير للرحلة تعتمد على مدى جودة تجميع المحطة الأساسية ، حيث يتم وضع أسلاك التوصيل التي تربط كل هذه الأجهزة.
قد تتضمن المحطة الأساسية:
- البطارية الرئيسية ، التي يُحتمل استخدامها لتشغيل شاشة LCD و / أو نظارات FPV وربما جهاز استقبال فيديو.
- بطارية مساعدة لجهاز الإرسال و / أو مستقبل الفيديو.
- حامل شاشة LCD و / أو حامل نظارات FPV.
- حامل لجهاز استقبال الفيديو.
- مساحة تخزين لمعدات التحكم.
- حامل هوائي بعيد المدى (أو موقع هوائي اتجاهي محمول)
- موقع لشاحن البطارية (البطاريات) الرئيسية.
- مساحة لقطع غيار الطائرات بدون طيار (مراوح ، محركات ، بطاريات ، عناصر إطار).
"المحطة الأساسية" ليست بالضرورة منتجًا تجاريًا يمكن استخدامه بسهولة مع أي تطبيق غير مأهول ، على العكس من ذلك ، يمكن تصميمها وبناؤها بواسطة طيار هاو بمفرده. عادةً ما يبدأ بناء محطة أساسية باختيار حقيبة حمل متينة (مثل Pelican أو Nanuk) ، على الرغم من أنه يمكن أيضًا استخدام / تكييف حقيبة ظهر صلبة. غالبًا ما يتم استخدام حامل ثلاثي القوائم لتركيب الهوائي أعلى من الأرض.

.تعقب الهوائي
جهاز تعقب الهوائي هو جهاز كهروميكانيكي يتتبع موقع الطائرة بدون طيار في ثلاثة أبعاد باستخدام إحداثيات GPS ، ومعرفة موقع تعقب GPS ، يوجه الهوائي إلى الجانب بدون طيار. يشيع استخدام أجهزة تعقب الهوائي في المهمات بعيدة المدى ولا توجد العديد من المنتجات التجارية في السوق. يتكون جهاز التعقب من جهاز استقبال GPS ، وبوصلة (وأحيانًا IMU) ، وجهاز تحكم دقيق ، ومستقبل بيانات (لتلقي إحداثيات GPS للطائرة بدون طيار) ، ومحرك دوار وآخر قابل للإمالة ، وإطار ميكانيكي ، وهوائي اتجاهي ، وبطارية. لتقليل التأثير السلبي للعوائق ، يتم رفع أنظمة تعقب الهوائي عن الأرض باستخدام حامل ثلاثي القوائم.








