Съдържание
- Направи си сам дрон: Урок 1. Терминология.
- Направи си сам дрон: Урок 2. Рамки.
- Направи си сам дрон: Урок 3. Електроцентрала.
- Направи си сам дрон: Урок 4. Контролер на полета.
- Направи си сам дрон: Урок 5. Монтаж.
- Направи си сам дрон: Урок 6. Проверка на производителността.
- Направи си сам дрон: Урок 7. FPV и разстояние.
- Дрон със собствените си ръце: Урок 8. Самолети.
Въведение
След като сте избрали или изградили рамка, следващата стъпка е да изберете правилния задвижващ механизъм. Тъй като повечето от съществуващите дронове са електрически, ще се съсредоточим върху генерирането на чисто електрическо задвижване чрез безчеткови DC двигатели. Електроцентралата включва двигатели, ротори (витла, съкратени подпори), ESC и акумулаторна батерия.
1. Мотор
От това какви двигатели използвате при сглобяването си, ще зависи от това какъв максимален товар може да вдигне дронът, както и колко време може да бъде в полет. Електроцентралата задължително трябва да се състои от двигатели от една и съща марка и модел, този подход ще й осигури балансирана работа. Трябва да се отбележи, че дори абсолютно идентичните (марка / модел) двигатели могат да имат малка разлика в скоростта, която впоследствие се изравнява от полетния контролер.
Четка срещу безчетков
При четки двигатели, намотаният ротор се върти вътре в статора, върху който магнитите са твърдо фиксирани. При безчетковите двигатели всичко е на завой; намотката е здраво закрепена към вътрешността на статора, а магнитите са монтирани на вала и се въртят. В повечето случаи ще вземете предвид само безчеткови DC двигатели (BC). Мотори от този тип се използват широко в радиолюбителската индустрия за сглобяване на продукти, вариращи от хеликоптери и самолети до системи за задвижване в автомобили и лодки.
Безчетковите двигатели за палачинки са с по -голям диаметър, по -плоски и като цяло имат висок въртящ момент и по -ниски KV (подробности по -долу). БПЛА с малки размери (обикновено с размер на длан) често използват малки четени двигатели поради тяхната по-ниска цена и прост двупроводен контролер. Докато безчетковите двигатели се предлагат в различни размери и спецификации, изборът на по -малък размер не означава, че ще бъде по -евтин.

Inrunner срещу Outrunner
Има няколко типа безчеткови DC двигатели:
- Inrunner е вътрешен ротор. Намотката е фиксирана към статора, магнитите са монтирани на вала на ротора, който се върти (обикновено се използва на RC лодки, хеликоптери и автомобили поради високия KV).
- Outrunner - външен ротор. Магнитите са фиксирани към статор, който се върти около неподвижна намотка. Дъното на двигателя е фиксирано.(като правило, двигателите от този тип имат по -голям въртящ момент).
- Hybrid Outrunner - Това е технически „Outrunner“, но внедрено в пакет „Inrunner“. Този подход направи възможно комбинирането в един тип на въртящия момент "Outrunner" и отсъствието на външни въртящи се елементи, както при двигателите от типа "Inrunner".
KV
KV рейтинг - макс. броят на оборотите, които двигателят може да развие без загуба на мощност при дадено напрежение. За повечето многороторни БПЛА ниска стойност на KV (например от 500 до 1000) е от значение, тъй като това помага да се осигури стабилност. Докато за акробатичния полет ще бъде от значение стойността на KV между 1000 и 1500, в тандем с ротори с по -малък диаметър (витла). Да приемем, че стойността на KV за определен двигател е 650 об / мин, след това при напрежение 11,1 V двигателят ще се върти със скорост от: 11,1 × 650 = 7215 об / мин, и ако използвате двигателя при по -ниско напрежение (да речем 7,4 V), тогава скоростта на въртене ще бъде: 7,4 × 650 = 4810 об / мин. Важно е да се отбележи обаче, че използването на ниско напрежение обикновено означава по -голямо потребление на ток (мощност = ток × напрежение).
Тяга
Някои производители на безчеткови двигатели могат да посочат в спецификацията информация за максималната възможна тяга (Тяга), генерирана от двигателя във връзка с препоръчания основен ротор. Мерната единица за тяга обикновено е килограм (Kg / Kg), паунд (Lbs) или Нютон (N). Например, ако изграждате квадрокоптер и знаете стойността на тягата на един двигател = до 0,5 кг в отделение с 11-инчов ротор, тогава на изхода четири такива двигателя могат да бъдат повдигнати при максимална тяга: 0,5 кг × 4 = 2 кг. Съответно, ако общото тегло на вашия квадрокоптер е малко по -малко от 2 кг, тогава с такава електроцентрала той ще излети само при максимални обороти (максимална тяга). В този случай ще бъде уместно или да изберете по -мощен пакет от роторни двигатели, който да осигури по -голяма тяга, или да намалите общото тегло на дрона. При макс. тяга на електроцентралата = 2 кг, теглото на дрона трябва да бъде не повече от половината от тази стойност (1 кг, включително теглото на самите двигатели). Подобно изчисление може да се направи за всяка конфигурация. Да предположим, че теглото на хексакоптера (включително рамката, двигателите, електрониката, аксесоарите и т.н.) е 2,5 кг. Това означава, че всеки двигател за такъв монтаж трябва да осигурява (2,5 кг ÷ 6 двигателя) × 2 = 0,83 кг тяга (или повече). Сега знаете как да изчислите оптималната тяга на двигателите въз основа на общото тегло, но преди да вземете решение, ви предлагаме да се запознаете с разделите по -долу.
Допълнителни съображения
- Съединители: Двигателите с постоянен ток имат два съединителя "" и "-". Смяната на проводниците на места променя посоката на въртене на двигателя.
- Конектори: Безчетковите DC двигатели имат три конектора. За да разберете как да ги свържете, както и как да промените посоката на въртене, вижте раздела ESC по -долу.
- Намотки: Намотките влияят на KV на двигателите. Ако се нуждаете от най -ниската стойност на KV, но давате приоритет на въртящия момент, най -добре е да насочите вниманието си към безчетковите постояннотокови двигатели тип Палачинка.
- Монтаж: Повечето производители имат обща електрическа схема за двигатели с постоянен ток за двигатели с постоянен ток, което позволява на рамковите компании да избягват да правят така наречените адаптери. Шаблонът обикновено е метричен, с два отвора на 16 мм един от друг, и още два отвора на 19 мм един от друг (90 ° спрямо първия).
- Резба: Монтажната резба, използвана за закрепване на безчетковия двигател към рамката, може да варира. Обичайните метрични размери на винтовете са M1, M2 и M3, имперските размери могат да бъдат 2-56 и 4-40.
2. Основни ротори (витла)
Основни ротори (витла, съкратени подпори) за многороторни БЛА произхождат от витлата на самолети с радиоуправление. Мнозина ще попитат: защо да не използват остриета на хеликоптери? Въпреки че това вече е направено, представете си размерите на хексакоптер с остриета на хеликоптер. Заслужава да се отбележи, че хеликоптерната система изисква промяна в стъпката на лопатките и това значително усложнява дизайна.
Можете също така да попитате защо не използвате турбореактивен двигател, турбовентилаторен двигател, турбовитлов двигател и т.н.? Със сигурност те са изключително добри в осигуряването на много тяга, но също така изискват много енергия. Ако основната грижа на дрона е да се движи много бързо, вместо да се движи в затворено пространство, един от горните двигатели може да бъде добър вариант.
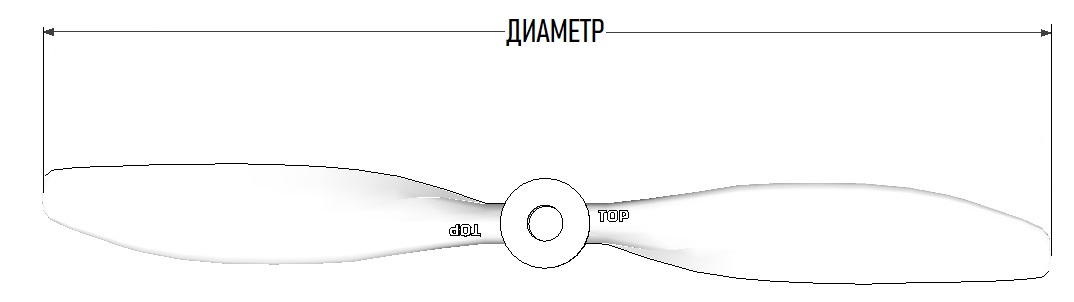
Лопатки и диаметър
Основният ротор на повечето многороторни БЛА има две или три лопатки. Най -широко използваните витла са с две лопатки. Не приемайте, че добавянето на повече остриета автоматично ще увеличи тягата; всяка лопатка работи в потока, нарушен от предишната лопатка, намалявайки ефективността на витлото. Основният ротор с малък диаметър има по -малка инерция и поради това е по -лесен за ускоряване и забавяне, което е важно за акробатичния полет.

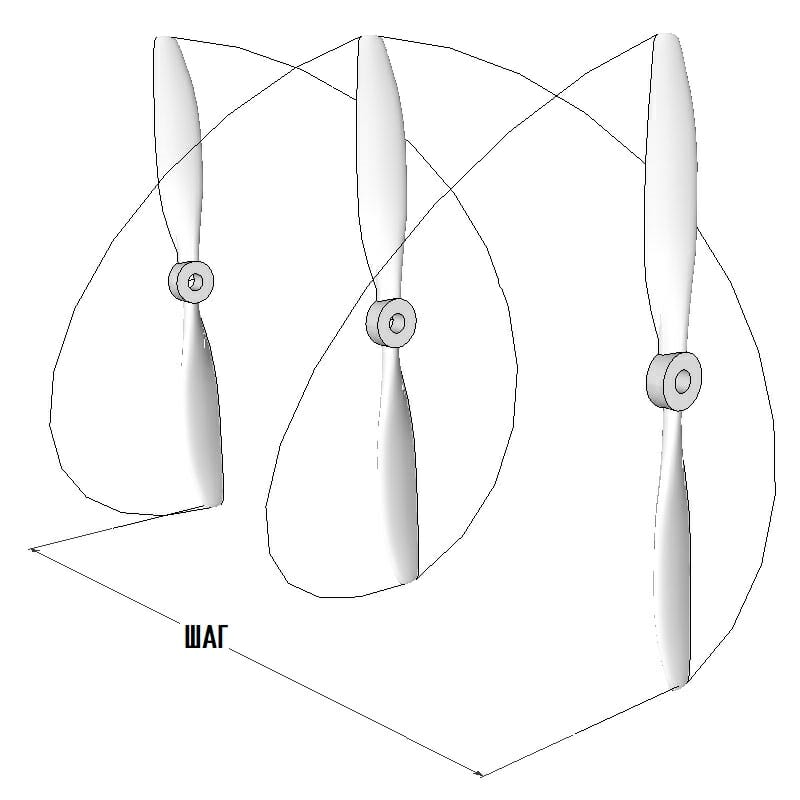
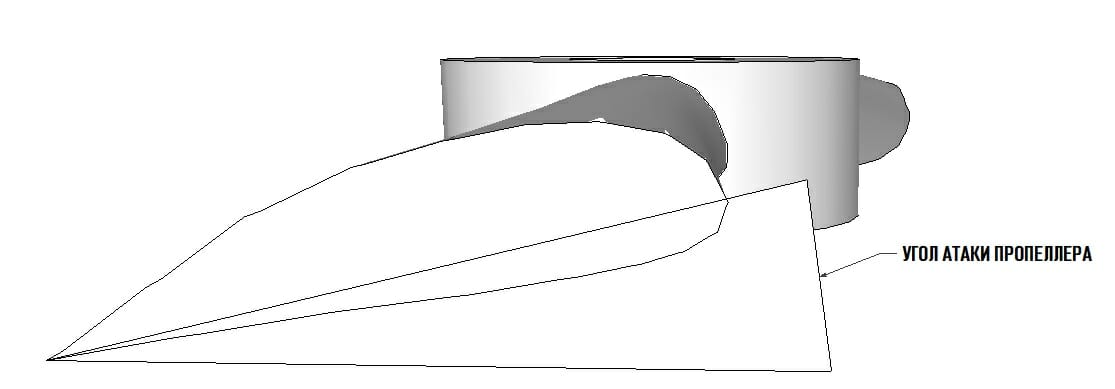
Стъпка / ъгъл на атака / ефективност / тяга
Тягата, генерирана от основният ротор зависи от плътността на въздуха, броя на оборотите на витлото, неговия диаметър, формата и площта на лопатките, както и неговата стъпка. Ефективността на витлото е свързано с ъгъла на атака, който се определя като стъпката на лопатката минус ъгъла на спиралата (ъгълът между получената относителна скорост и посоката на въртене на лопатката). Самата ефективност е съотношението на изходната мощност към входната мощност. Повечето добре проектирани витла са с над 80% ефективност. Ъгълът на атака се влияе от относителната скорост, така че витлото ще има различна ефективност при различни скорости на двигателя. Ефективността също е силно повлияна от предния ръб на лопатката на главния ротор и е много важно тя да е възможно най -гладка. Докато дизайнът с променлива стъпка би бил най-добрият, допълнителната сложност, необходима за присъщата простота на многороторния, означава, че витлото с променлива стъпка почти никога не се използва.
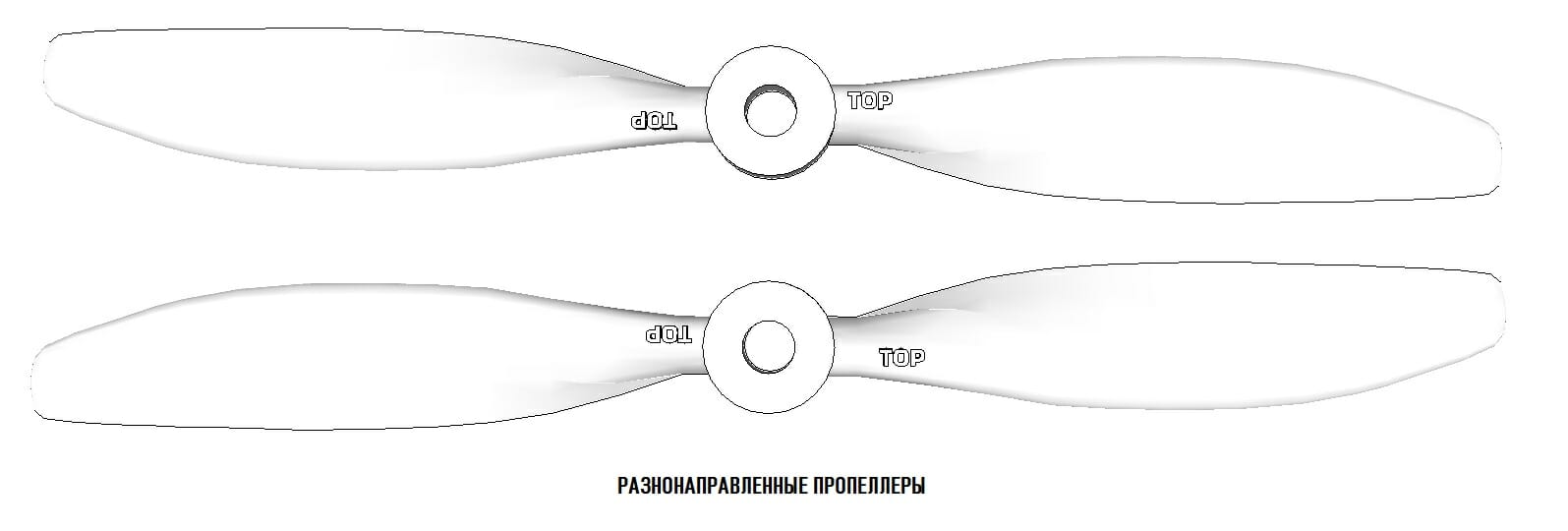
Въртене
Роторите са проектирани за въртене по часовниковата стрелка (CW) или обратно на часовниковата стрелка (CCW). Посоката на въртене се показва чрез наклона на лопатката ( погледнете перката от прикладаVtailY6X8
Изпълнителни материали
Материал (и), използван (и) за производството на ротори (витла), могат да имат умерен ефект по време на полет производителност, но безопасността трябва да бъде основен приоритет, особено ако сте начинаещи и неопитни.
- Пластмасата (ABS / найлон и др.) е най-популярният избор, когато става въпрос за многодвигателни БЛА. Това до голяма степен се дължи на ниските разходи, приличните характеристики на полета и експоненциалната издръжливост. Обикновено в случай на катастрофа поне един витло е счупен и докато овладеете дрона и се научите да летите, винаги ще имате много счупени подпори. Твърдостта и устойчивостта на удар на пластмасовия винт могат да бъдат подобрени чрез подсилване с въглеродни влакна (въглерод), този подход е макс. ефективен и не толкова скъп в сравнение с пълноценното витло от въглеродни влакна.
- Полимер, подсилен с влакна (въглеродни влакна, армиран с въглерод найлон и др.) -е „усъвършенстваната“ технология в много отношения. Частите от въглеродни влакна все още не са много лесни за производство и затова плащате повече за тях, отколкото за обикновен пластмасов винт с подобни параметри. Витлото, изработено от въглеродни влакна, е по -трудно да се счупи или огъне и следователно, ако се разбие, ще нанесе повече щети на всичко, с което влезе в контакт. В същото време въглеродните витла обикновено са добре изработени, по -твърди (осигурявайки минимални загуби на ефективност), рядко се нуждаят от балансиране и са с по -леко тегло от всеки друг материал. Препоръчва се да се разглеждат такива витла само след като нивото на пилотиране на потребителя стане удобно.
- Дървото е рядко използван материал за производството на многороторни БЛА ротори, тъй като тяхното производство изисква механична обработка, което по -късно прави дървените витла по -скъпи от пластмасовите. В същото време дървото е доста силно и никога не се огъва. Имайте предвид, че дървените витла все още се използват в радиоуправляеми самолети.



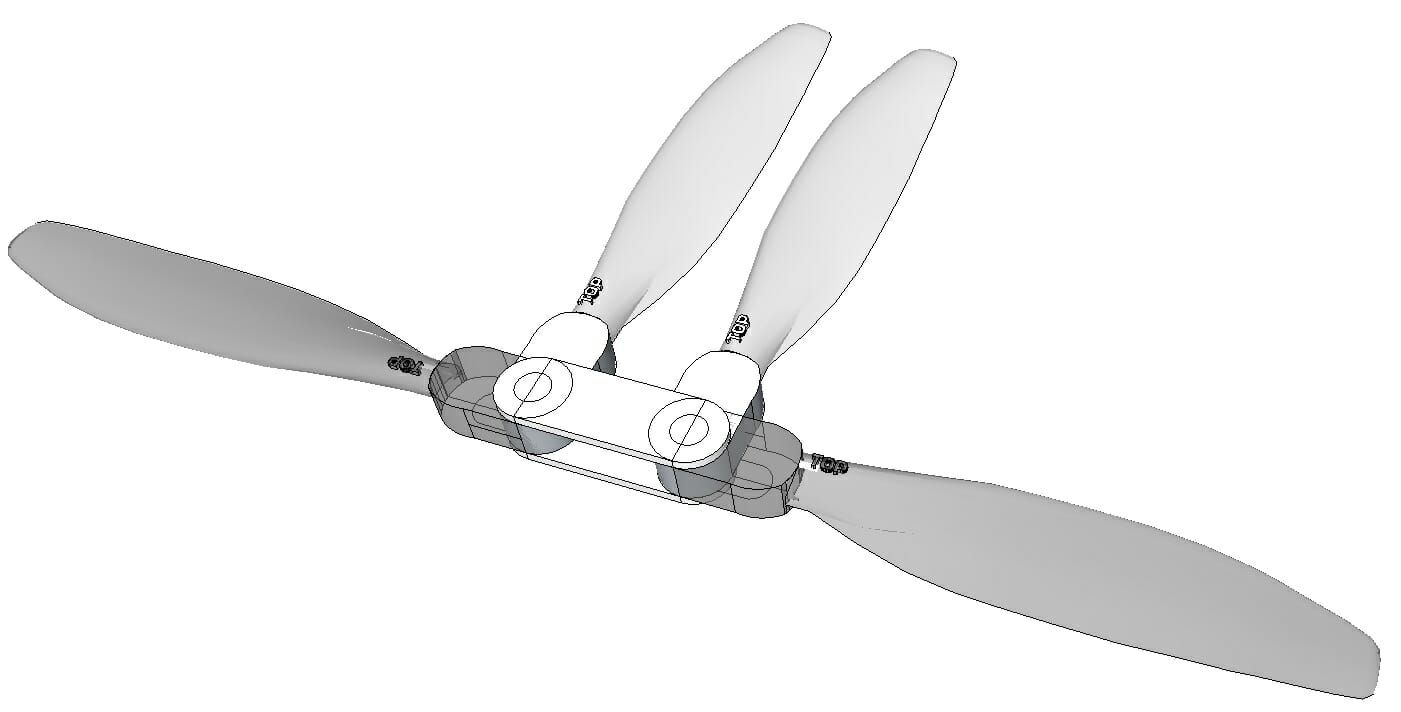
Сгъваеми
Сгъваемите подпори имат централна част, която се свързва с две въртящи се остриета. Когато центърът (който е свързан с изходния вал на двигателя) се върти, центробежните сили действат върху лопатките, като ги изтласкват навън и по същество правят витлото „твърдо“, със същия ефект като класическото сгъваемо витло. Поради ниското търсене и големия брой необходими части, сгъваемите витла са по -рядко срещани. Основното предимство на сгъваемите подпори е компактността, а в комбинация със сгъваема рамка транспортните размери на дрона могат да бъдат значително по -малки от размерите на полета. Съпътстващо предимство на сгъваемия механизъм е липсата на необходимост, в случай на катастрофа, да се смени изцяло витлото, ще бъде достатъчно да се смени само повредената лопатка.
Инсталация
Подобно на БЛА, роторите могат да имат широк диапазон от размери. По този начин в индустрията има редица „стандартни“ диаметри на вала на двигателя. В тази връзка основният ротор често се доставя с малък набор от адаптерни пръстени (те приличат на шайби с отвори с различни диаметри в центъра), които се монтират в централния отвор на подпората
Винтът може да бъде фиксиран към двигателя въз основа на начина на монтиране, поддържан от вашия двигател. Ако валът на двигателя не включва никакви опции за закрепване (резбова връзка, различни закрепващи устройства и т.н.), тогава се използват специални адаптери, като например подпори и цангови скоби.
- Propsaver
- Затягащ патронник
Безчеткови двигатели с външен ротор (тип "Outrunner"), като правило, в горната му част, имат няколко отвора с резбае също толкова популярен вариант за закрепване на витлото към вала на мотора BC. Валът на такъв двигател има резба в края, чиято посока е противоположна на посоката на въртене на ротора. Този подход елиминира спонтанното разхлабване на фиксиращата гайка, като гарантира безопасна и надеждна работа на дрона.
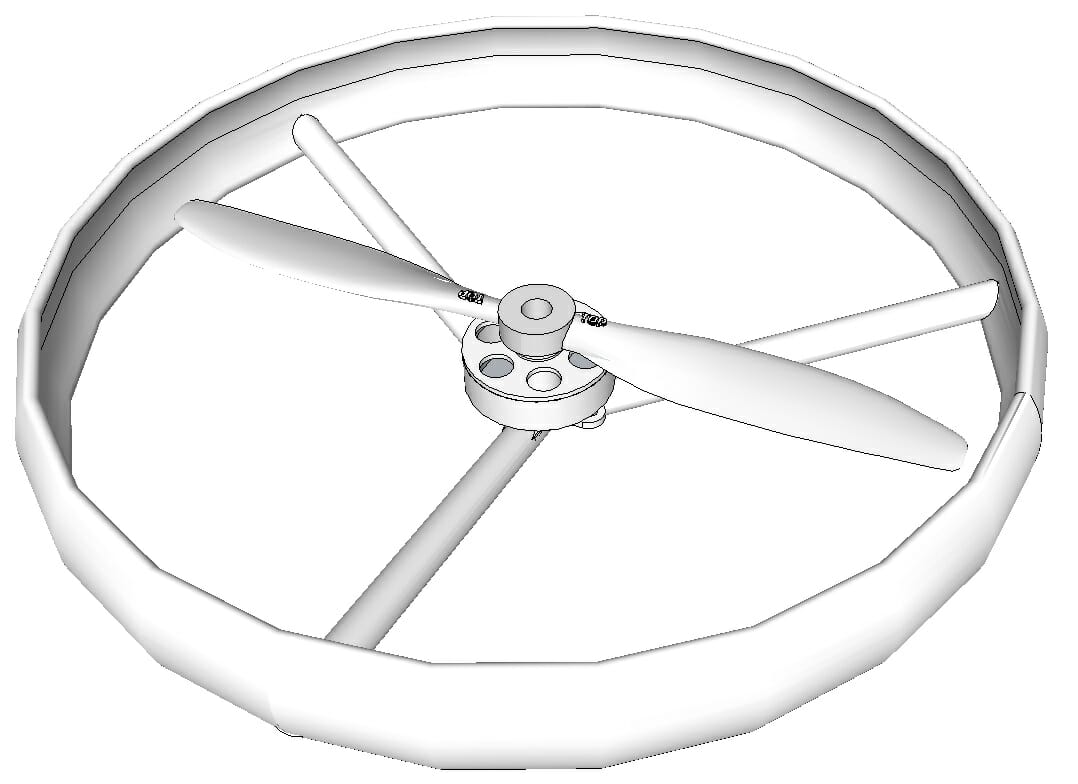
Защита на роторите
Защита на роторите - предназначена да изключи директния контакт на електроцентралата на БЛА с предстоящ обект, като по този начин се запази нейната цялост и работоспособност, както и за предотвратяване на наранявания o бързо въртящи се витла в резултат на сблъсъци с хора и животни. Защитите на витлото са прикрепени към основната рамка. В зависимост от версията, той може или частично да припокрива работната зона на електроцентралата, или напълно (защита на пръстена). Защитата на витлото най -често се използва при малки (играчки) БЛА. Използването на защитни елементи в монтажа също носи редица компромиси, сред които:
- Може да причини прекомерни вибрации.
- По принцип издържа на леки удари.
- Може да намали тягата, ако под витлото са поставени твърде много монтажни крачета.
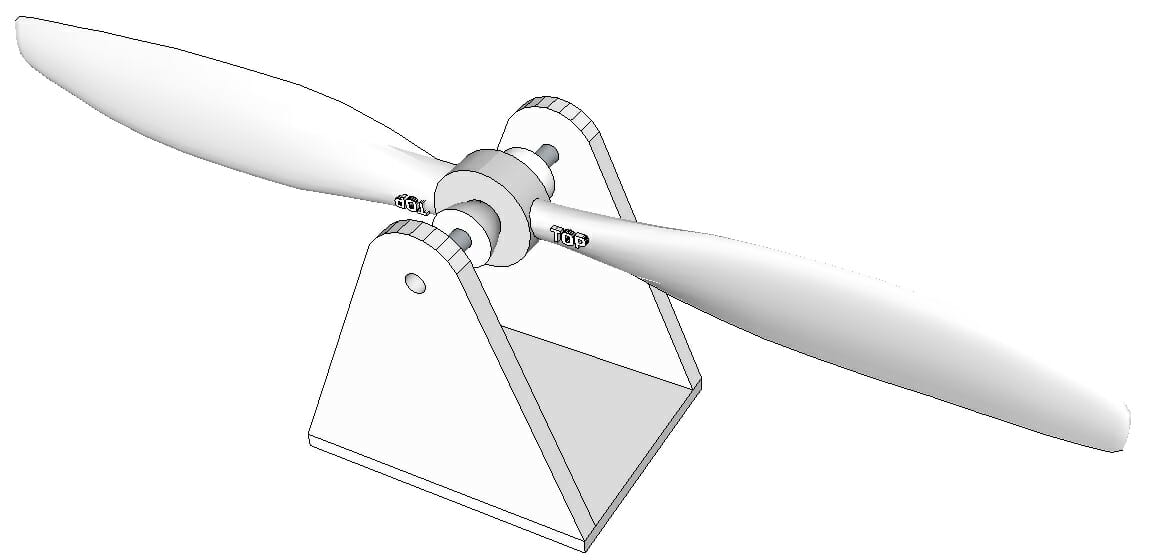
Балансиране
Лошото балансиране се случва на повечето евтини витла. За да се уверите в това, не е нужно да ходите далеч, просто вмъкнете молив в централния отвор на винта (като правило, при дисбаланс, едната страна ще бъде по -тежка от другата). Ето защо е силно препоръчително да балансирате вашите подпори, преди да ги монтирате на двигателите. Небалансираното витло ще предизвика прекомерни вибрации, които от своя страна ще повлияят негативно на работата на полетния контролер (проявява се в неправилно поведение на дрона по време на полет), да не говорим за увеличаване на шума, повишено износване на елементите на електроцентралата и влошаване на качеството на окачената камера.
Витлото може да се уравновеси по различни начини, но ако изграждате дрон от нулата, тогава в арсенала от инструменти трябва да има евтин балансиращ витло, който ви позволява лесно и просто да определите дисбаланса на теглото в витлото. За да изравните теглото, можете или да смилате най -тежката част на опората (да смилате равномерно централната част на острието и в никакъв случай да не отрежете частта на витлото), можете също да балансирате, като залепите парче лента (тънка) върху по -лекото острие (добавете сегментите равномерно, докато се постигне баланс). Обърнете внимание, че колкото по -далеч от центъра правите балансираща надстройка (шлайфане или добавяне на колан) на витлото, толкова по -голям ще бъде ефектът въз основа на принципа на въртящия момент.
3. ESC
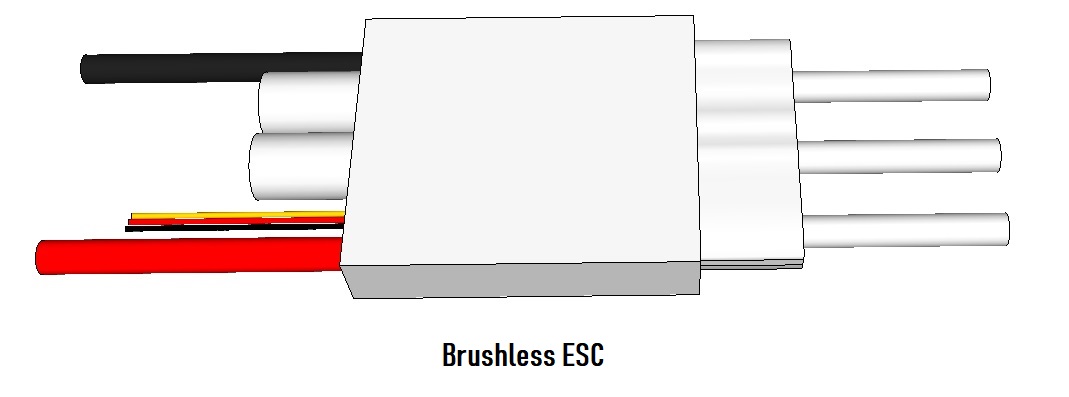
ESC (английски електронен контролер на скоростта; рус.електронен контролер на скоростта) - позволява на полетния контролер да контролира скоростта и посоката на двигателя. При правилното напрежение ESC трябва да може да издържи макс. токът, който двигателят може да консумира, както и ограничаване на тока, преминаващ през фазата по време на превключване. Повечето ESC за хобита с дронове позволяват на двигателя да се върти само в една посока, но с правилния фърмуер те могат да работят и в двете посоки.
Връзка
Първоначално ESC може да бъде объркващо, тъй като има няколко проводника / пина / конектора, които са на разположение за свързването му. страни (ESC може да се предлага със или без споени конектори).
- Захранване: Два дебели проводника (обикновено черен и червен) са предвидени за захранване от разпределителната платка / сбруя, към която захранването идва директно от основната батерия на самолета.
- 3 конектора: Налични са три конектора от противоположната страна на контролера за свързване към три конектора (обикновено се доставят с двигатели) на безчеткови двигател. Използването на конектори при свързване на ESC позволява, ако е необходимо (в случай на повреда), бързо да смените контролера, без да използвате поялник. Случва се съединителите с форма на куршум, идващи с двигателя, да не съвпадат с конекторите на регулатора, като в този случай просто ги сменете с подходящи. Кое от трите е "плюс" и кое е "минус"? Референтната точка е прост, идващ положителен проводник от батерията, преминава в положителен на ESC, подобно на минус.
- 3-пинов R / C серво конектор с тънки проводници:, през който се обработва сигналът, идващ от приемника, от които един проводник е сигнал (предаване на газовия сигнал към ESC или вход), вторият "минус" (или заземяване) и положителен проводник (не се използва, ако няма вграден BEC; с вграден BEC, това е 5V изходна мощност, която по-късно може да се използва за захранване бордова електроника).
BEC
В първите дни на моделирането на самолети, двигателят с вътрешно горене се използва като електроцентрала, а бордовата електроника се захранва от малка батерия. С появата на електрическо сцепление и контролери (ESC), в последния, те започнаха да включват така наречената верига за премахване на батерията-BEC (на английски. Circuit Battery Eliminator; или бордови преобразувател на енергия; като правило, той осигурява допълнителен източник на ток с напрежение 5V при ток 1А или по -висок). С други думи, това е преобразувател на напрежение, използван при монтажа LiPo във напрежение за захранване на бордовата електроника на дрона.
При сглобяването на мултиротора всички ESC трябва да бъдат свързани към полетния контролер, но е необходима само една BEC, в противен случай може да възникнат проблеми при захранването на същите линии. Тъй като обикновено няма начин да деактивирате BEC на ESC, най -добре е да премахнете червения проводник () и да го увиете с електрическа лента за всички ESC, с изключение на един. Също така е важно да оставите черния проводник (заземен) за обща основа.
Фърмуер
Не всички ESC на пазара са еднакво добри за приложения с много ротори. Важно е да се разбере, че преди появата на многомоторни безпилотни летателни апарати безчетков двигател се използва предимно като електроцентрала за радиоуправляеми автомобили, самолети и хеликоптери. Повечето не изискват бързо време за реакция или актуализации. ESC с вграден софтуер SimonK или BLHeli могат да реагират много бързо на входящи промени, което обикновено прави разликата между стабилен полет или катастрофа.
Разпределение на мощността
Тъй като всеки ESC се захранва от основната батерия, конекторът на основната батерия трябва по някакъв начин да бъде разделен на четири ESC. Това става с помощта на платка за разпределение на електроенергиясноп за разпределение на електроенергияДекани
4. Батерия
Химия
Батериите, използвани в безпилотни летателни апарати, в момента са изключително литиев полимер (LiPo), а съставът на някои от тях е доста екзотичен - литиев манган или друг литий варианти. Оловната киселина просто не е подходяща и NiMh / NiCd все още са твърде тежки за капацитета си и често не могат да осигурят необходимите високи скорости на изхвърляне. LiPo предлага висока производителност и скорост на разреждане с ниско тегло. Недостатъците са относително високата им цена и постоянните проблеми с безопасността (опасност от пожар).
Напрежение
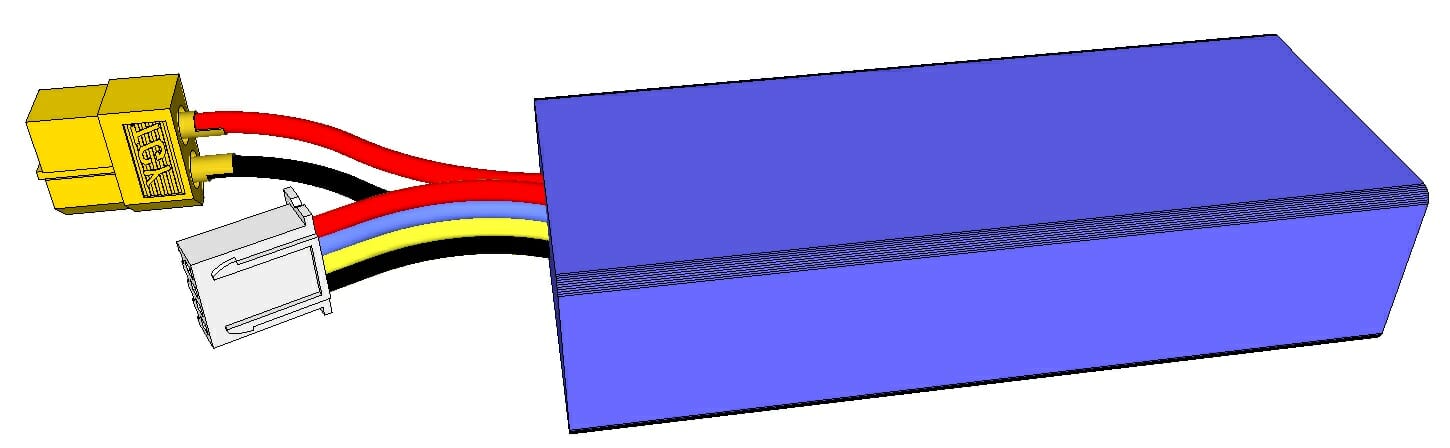
На практика имате нужда само от една батерия за вашия БЛА. Напрежението на тази батерия трябва да съответства на BK двигателите, които сте избрали. Почти всички батерии, използвани днес, са базирани на литиеви и съдържат няколко клетки (кутии) с по 3,7 V всяка, където 3,7 V = 1 S (т.е. батерия с една кутия; 2S е с две кутии и т.н.). Следователно батерията с етикет 4S вероятно ще има номинална стойност 4 × 3.7V = 14.8V. Също така броят на кутиите ще ви помогне да определите кое зарядно устройство да използвате. Обърнете внимание, че едноклетъчната батерия с голям капацитет може физически да изглежда като многоклетъчна батерия с нисък капацитет.
Капацитет
Капацитетът на батерията се измерва в ампер-часове (Ah). Малките батерии могат да имат капацитет 0.1Ah (100mAh), капацитетът на батерията за средно големи дронове може да варира от 2-3Ah (2000mAh-3000mAh). Колкото по -голям е капацитетът, толкова по -дълго е времето за полет и съответно, толкова по -тежка е батерията. Времето за полет на конвенционален БЛА може да бъде в диапазона от 10-20 минути, което може да изглежда краткотрайно, но трябва да разберете, че дронът постоянно се бори с гравитацията по време на полета и за разлика от самолет, той няма повърхности (крила), които осигуряват помощ под формата на оптимална повдигаща сила.
Скорост на разреждане
Скоростта на разреждане на литиевата батерия се измерва в „C”, където 1C е капацитетът на батерията (обикновено в ампер часове, освен ако не обмисляте дрон с размерите на Палма). Скоростта на разреждане на повечето LiPo батерии е най-малко 5C (пет пъти по-голям капацитет), но тъй като повечето двигатели, използвани в многороторни БЛА, консумират много ток, батерията трябва да може да се разрежда при невероятно висок ток, който обикновено е около 30А или повече.
Безопасност
LiPo батериите не са напълно безопасни, тъй като съдържат водороден газ под налягане и имат склонност да изгарят и / или експлодират, когато нещо нещо не е наред. По този начин, ако имате някакви съмнения относно здравословното състояние на батерията, по никакъв начин не я свързвайте с дрона или дори със зарядно устройство - считайте я за „изведена от експлоатация“ и я изхвърлете правилно. Сигналните сигнали, че нещо не е наред с батерията, са вдлъбнатини или подуване (т.е. изтичане на газ). Когато зареждате LiPo батерия, най -добре е да използвате сейф LiPo кутия (сейф за батерии). Съхранението на батерии

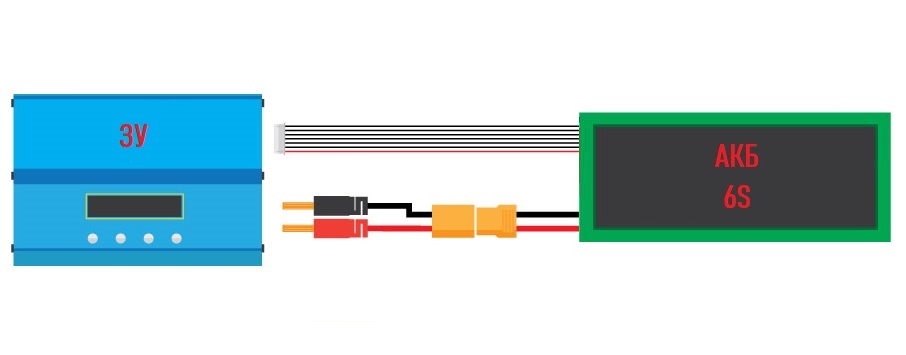
Зареждане
Повечето LiPo батерии имат два конектораЗарядното устройствоопасенията за безопасността, свързани с литиево -полимерните батерии
.Монтаж
Батерията е най -тежкият елемент на дрона, така че трябва да се монтира в централната мъртва точка, за да се гарантира същото натоварване на двигателите. Батерията не включва никакъв специален монтаж (особено самонарезни винтове, които могат да повредят LiPo и да предизвикат пожар), така че някои използвани днес методи за монтаж включват велкро ленти, гумени, пластмасови отделения и други. Най -често срещаният вариант за монтиране на батерията е да окачите батерията под рамката с помощта на велкро лента.







