Съдържание
- Направи си сам дрон: Урок 1. Терминология.
- Направи си сам дрон: Урок 2. Рамки.
- Направи си сам дрон: Урок 3. Електроцентрала.
- Направи си сам дрон: Урок 4. Контролер на полета.
- Направи си сам дрон: Урок 5. Монтаж.
- Направи си сам дрон: Урок 6. Проверка на производителността.
- Направи си сам дрон: Урок 7. FPV и разстояние.
- Дрон със собствените си ръце: Урок 8. Самолети.
Въведение
Сега, след като сте избрали всички основни компоненти за вашия БЛА, можете да започнете сглобяването. Това ръководство ще обхване често срещани грешки при сглобяването на многороторен БЛА, заедно с някои полезни съвети за настройка. Този урок няма да обхваща елементи като камера / FPV система, устройства за далечни разстояния или други аксесоари (ще разгледаме в 7 урок).
Компоненти, които трябва да имате на този етап:
- Рамка (закупена или ръчно изработена)
- Двигатели, ESC, витла, батерия, зарядно устройство
- Разпределителна платка / сбруя
- Контролер на полета и комуникационно устройство (предлага се радиоуправление)

Задвижване
За да постигнете целите на този урок, двигателната система на вашия БЛА ще включва следните компоненти:
- Двигатели
- ESC
- Разпределение на мощността (дъска или сбруя)
- Батерия
- Контролер на полета
Обърнете внимание, че витлата не са в списъка. Не инсталирайте витла на този етап! Основните винтове ще бъдат свързани само в 6 -ти урок. Тъй като това е първият ви дрон, препоръчваме да направите „безрамкова“ електрическа връзка, преди да инсталирате всичко върху рамката; за да проверите всички връзки и да отстраните установените неизправности.
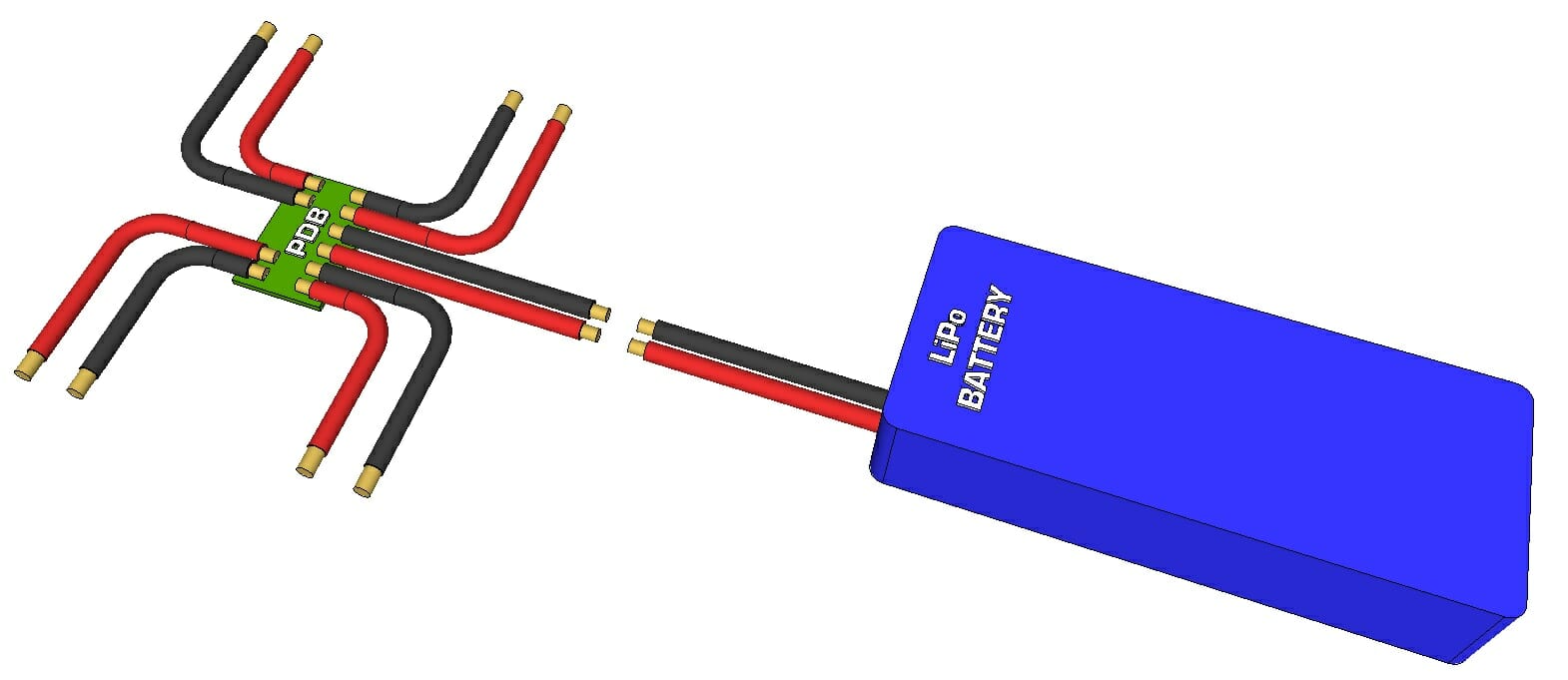
Батерия. Разпределение на мощността
Връзката между батерията и системата за разпределение на електроенергията трябва да бъде относително проста, ако и двете имат един и същ тип конектор. Ако е така, преминете към следващата стъпка. Ако конекторите са различни, в никакъв случай не прерязвайте проводниците на батерията, за да отделите конектора; това може да причини късо съединение и неприятен токов удар! Вместо това можете да вземете адаптер и да го използвате между конектора на батерията и конектора на разпределителната платка. Друг вариант може да бъде да потърсите свързващ конектор към конектора на батерията и да го купите; след това изрежете съществуващия конектор от разпределителя на захранването и запоявайте закупената подмяна, като първо се уверите, че няма връзка между положителните и отрицателните щифтове.
Важно е да се отбележи, че повечето многороторни БЛА нямат превключвател за включване / изключване, така че захранването се подава и изключва чрез свързване и изключване на основната батерия от конектора за разпределение на захранването, така че техните съединители трябва да бъдат сигурно закрепени и проводниците / местата за запояване са добре изолирани с термосвиваеми тръби и / или електрическа лента.
Изключете батерията от разпределителя на захранването, преди да продължите.
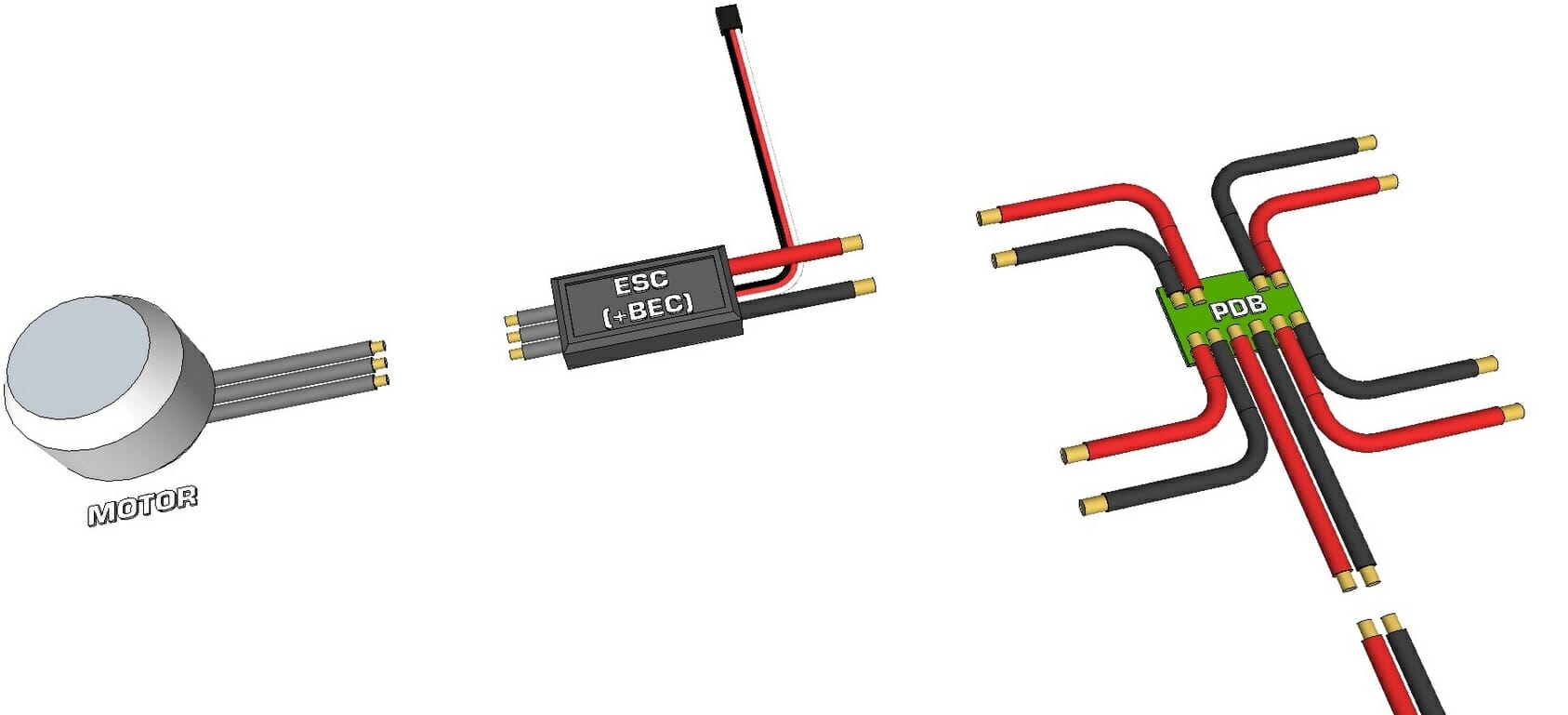
Двигател. ESC. Разпределение на мощността
Разпределителната платка за разпределение на мощността (PDP) или кабелното разпределение служи главно за разпределение на мощността от основната батерия към всеки ESC. Напрежението се подава към ESC както е, така че няма нужда да се увеличава (увеличава) или намалява (намалява) напрежението. Ако вашият дрон има четири двигателя, тогава трябва да имате четири ESC и следователно вашата разпределителна платка / разпределение на проводници в крайна сметка трябва да раздели основната батерия на четири връзки. Ако вашият PRP има шест връзки и вие изграждате квадрокоптер, тогава просто не е необходимо да свързвате последните две. Ако изграждате хексакоптер, вашият PDP трябва да разпределя мощността от основната батерия към шест връзки. ESC включва следните проводници:
- Една 3-жична 0,1-инчова лента с R / C конектор, от които черният щифт обикновено е заземен, червеният осигурява 5V изход (чрез BEC*) и жълто / бяло е входният сигнал.
- Три отделни проводника се свързват с трите проводника на безчетков двигател с постоянен ток (обикновено се доставят с женски куплунги, които вече са запоени или са включени).
- Два входни конектора за свързване на батерията към PDB (някои включват споени конектори със запояване, някои са включени, а понякога изобщо не са).
*ESC обикновено имат вградена схема за премахване на батерията (или BEC), която преобразува напрежението на основната батерия в 5V за захранване на приемника и полетния контролер. 5V обикновено се подава чрез RC конектор от ESC (обикновено централният / червения щифт). Имате нужда само от един BEC за захранване на полетния контролер.
Ако разпределителната платка използва съединители, които не съвпадат с конекторите на ESC или батерията, тогава ще трябва да закупите адаптери или да закупите нови конектори и да ги смените на ESC или PRP. Предимството остава при разпределителната платка, чиито конектори съвпадат с тези на батерията и ESC. Най-често литиево-полимерната батерия на БЛА може да има DEANS конекторXT60EC3
Ако искате да захранвате допълнителна електроника с нисък ток (LED осветление, висулка и т.н.), но на разпределителната платка няма резервни връзки, можете да използвате кабела за зареждане на батерията. Белият конектор за зареждане обикновено има един щифт за маса и един щифт за всяка клетка (1S, 2S, 3S и т.н.), използвани в комплекта LiPo батерии. Въпреки че този конектор наистина е само за зареждане на батерията, той може да осигури 3.7V изходно напрежение от всеки щифт и може да се използва за захранване на електроника с нисък ток, като сбруя или светодиоди.
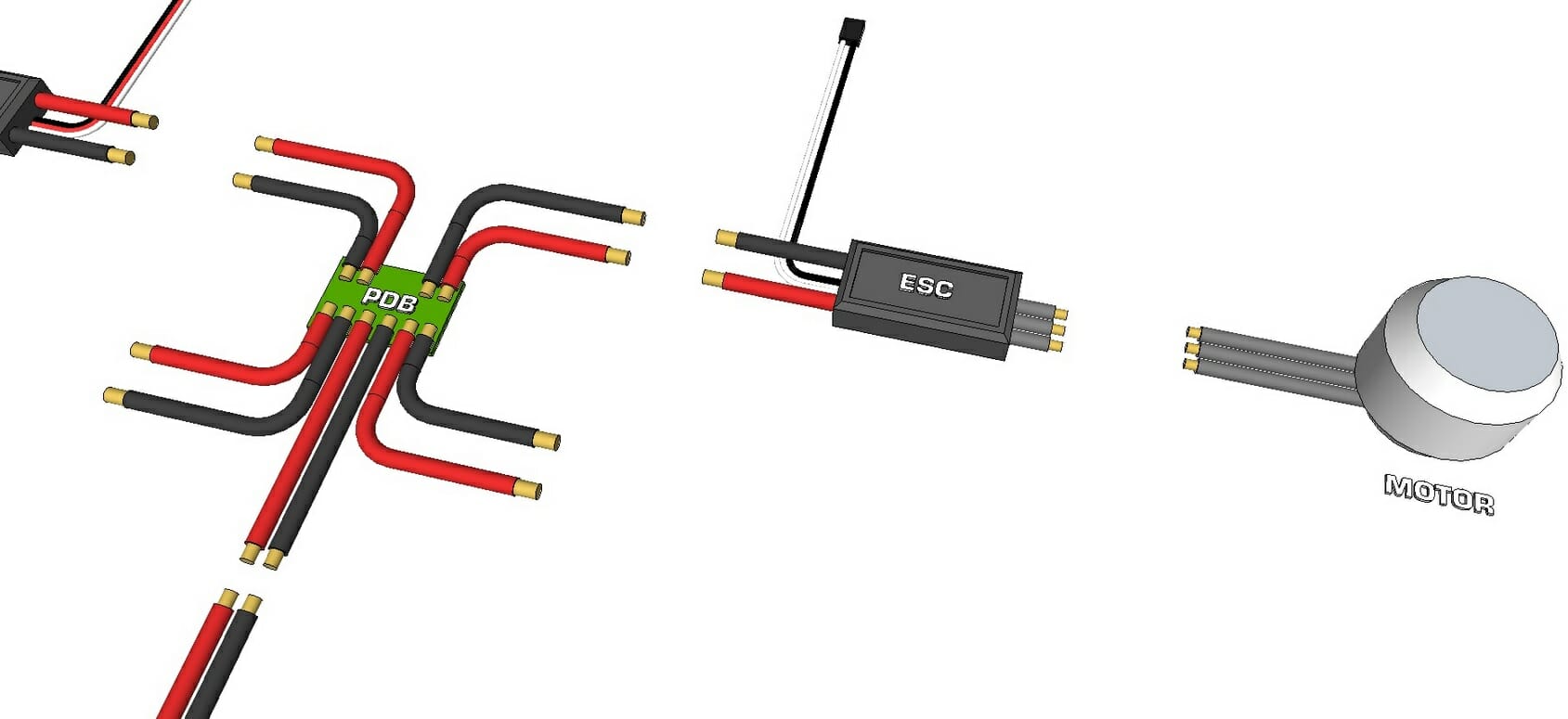
- Свалете червения проводник от всеки 3-пинов R / C конектор на круиз контрола, с изключение на един. Препоръчително е да направите това по такъв начин, че винаги да можете да ги включите отново, ако е необходимо. Увийте края на всеки изключен проводник с електрическа лента или използвайте термосвиваеми тръби за изолация, така че по -късно те да не могат да влязат в контакт с друга електроника. Единственият червен проводник, който е оставен недокоснат, ще захранва полетния контролер, използван в монтажа.
- Свържете двата захранващи проводника на всеки ESC към разпределителната платка, като се уверите, че червеният проводник преминава към положително (), а черният проводник към отрицателно (-).
- Ако разпределителната платка, която използвате, има свои собствени R / C конектори, в този случай от вас зависи да свържете R / C пиновете на всеки ESC към R / C конекторите на тази платка или ги свържете директно към полетния контролер.
- Свържете всеки от трите съединителя на двигателя към трите ESC конектора. В момента редът на свързване на тези съединители не е важен (ако това засяга посоката на въртене, по -късно ще бъде коригирано според необходимостта).
Моля, имайте предвид, че ако решите да премахнете или скриете окабеляването на този етап, по -късно може да се наложи да получите достъп до някои от връзките в съответствие с процедурата, описана в урок 6, по -специално да смените връзки между ESC и двигател, така че моторът да се върти в обратна посока.

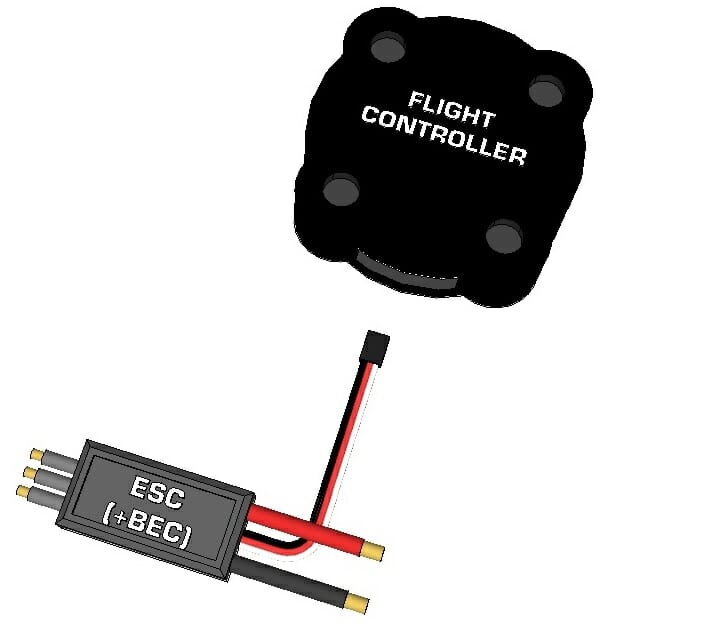
ESC. Контролер на полета.
Вече можете да свържете R / C входовете на круиз контролерите към полетния контролер. Избраният от вас полетен контролер трябва да има диаграма, която показва кои щифтове на контролера са свързани към двигателите на вашия многороторен агрегат. Тази диаграма също трябва да показва посоката на въртене на всеки двигател, но отново не е нужно да обмисляте посоката за сега.
- Вижте схемата на свързване между двигателите / ESC и полетния контролер в ръководството за употреба на компютъра.
- Свържете R / C конекторите на всеки ESC към съответните щифтове на полетния контролер, уверете се, че заземяващият проводник (обикновено черен) се свързва към заземяващия щифт на полетния контролер и сигналния щифт (бял или жълт)) се свързва със сигналния щифт на полетния контролер...
- Само един от RC конекторите ще има червения (захранващ) щифт.
Комуникация
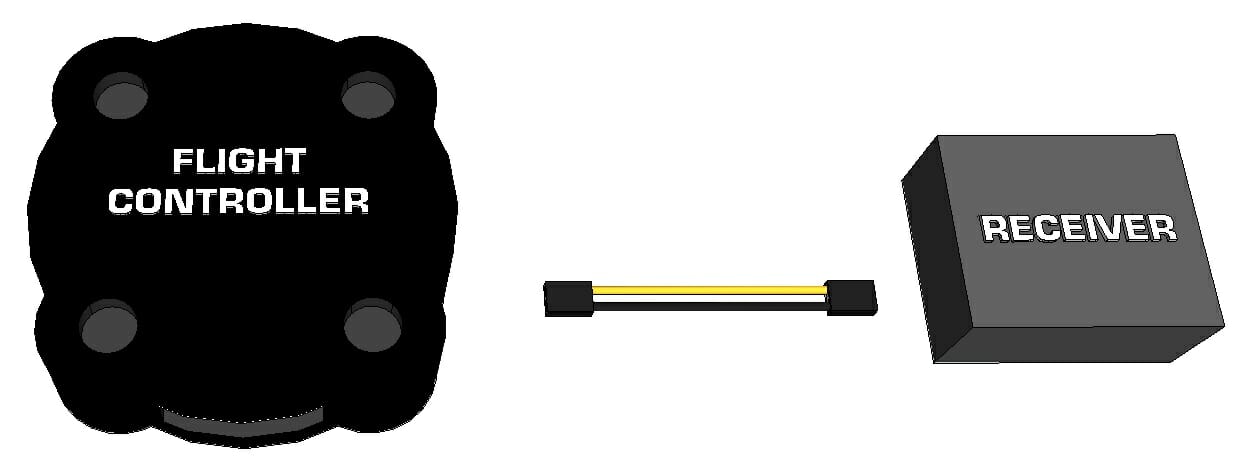
Приемник. Контролер на полета.
Да предположим, че в този урок сте направили избора в полза на радиоуправлението като входно устройство. Ако искате да използвате WiFi, Bluetooth или друг метод на въвеждане, моля, прочетете ръководството на полетния контролер и потърсете сериен вход; Този раздел ще опише как / къде да свържете серийното входно устройство към полетния контролер. Най -вероятно ще трябва да намерите и свържете изводите за предаване (Tx), приемане (Rx), напрежение (5V) и GND от безжичното устройство към предавателя, позволявайки на Rx от един към друг Tx и обратно.
Вашият RC предавател трябва да бъде снабден с подходящ RC приемник. Приемникът трябва да бъде свързан към предавателя, така че да можете да премахнете джъмпера за свързване от приемника (ако има такъв). Комплектът може да включва и държач за батерии тип АА, който е предназначен за захранване на приемника, но няма да го използваме, тъй като BEC ще захранва както приемника, така и полетния контролер. За да разберете кои RC приемни канали се свързват към кои щифтове на полетния контролер, трябва да погледнете ръководството за потребителя както на полетния контролер, така и на RC системата.
Ръководството на полетния контролер ще посочи местоположението на следните пинове, които трябва да бъдат съпоставени и свързани към приемника:
- Дросела
- Стъпка
- Извиване
- Рол
- Aux превключватели 1, 2, 3 и т.н.
Вече можете да осъществите следните връзки:
- Прочетете ръководството на полетния контролер, за да видите кой входящ щифт за R / C е свързан с която от горните функции.
- Прочетете ръководството на предавателя, за който канал е свързан всяка функция.
- Някои RC предаватели могат да бъдат препрограмирани, за да се промени функцията на всеки контакт. Ако решите да промените някакъв вход (джойстик или превключвател), направете го само след като сте сигурни, че знаете кой канал на приемника съответства на коя функция. Дроселът, Pitch, Yaw и Roll винаги трябва да бъдат свързани с два стика / джойстика, а не превключватели или бутони.
- Свържете дроселния канал на приемника към входа на дроселната клапа на полетния контролер.
- Свържете Pitch канала на приемника към Pitch входа на полетния контролер.
- Свържете канала Yaw на приемника към входа Yaw на полетния контролер.
- Свържете GND на полетния контролер (обикновено третия ред пинове) към GND на приемника (обикновено третия ред пинове).
- Ако ще се използва допълнителен вход, свържете Aux 1 на приемника към Aux 1 на полетния контролер и т.н.
Можете да използвате 3-пинови серво проводници за всеки канал, но само един от каналите (може да бъде всеки) трябва да има напрежение и маса; останалите се нуждаят само от сигнален проводник. Всички връзки могат да бъдат GND към GND, въпреки че е необходима само една. Отново приемникът не се нуждае от отделна батерия, тъй като ще се захранва от полетния контролер, който се захранва от BEC от един от ESC.
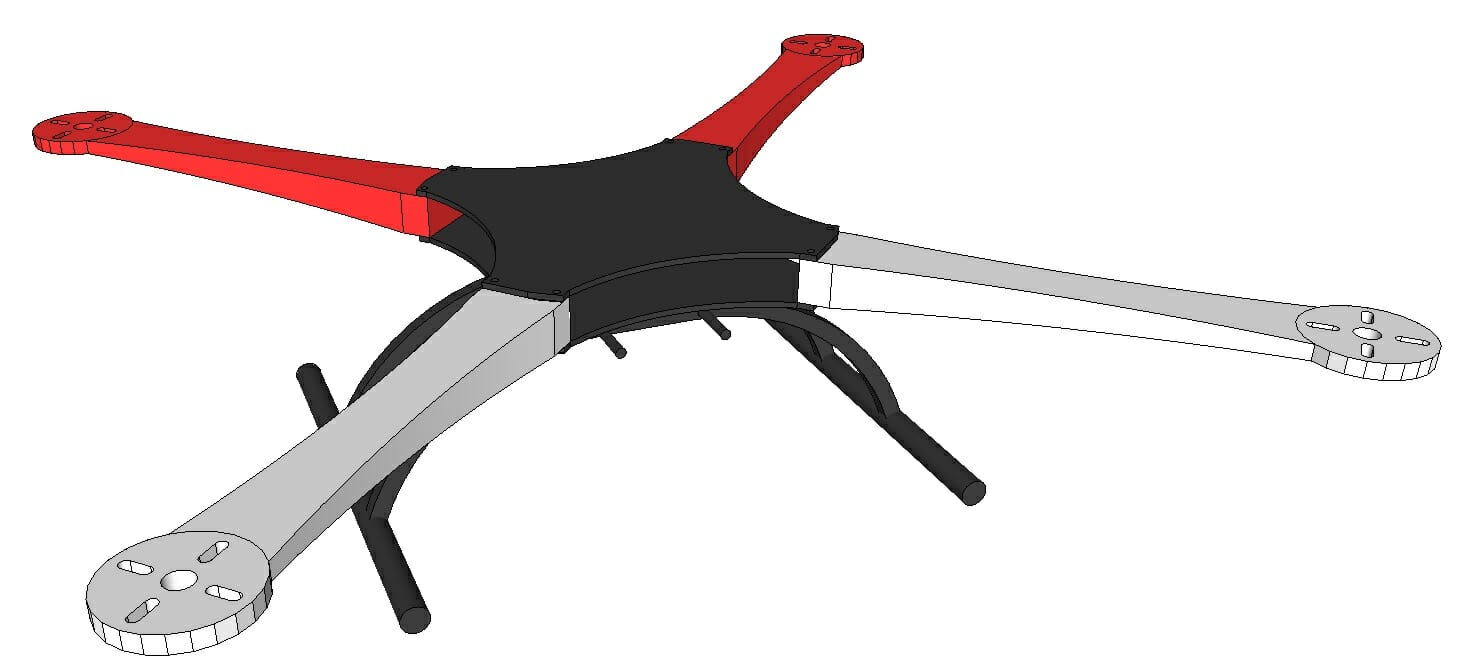
Сглобяване на рамката
Ако изграждате своя собствена рамка, можете да я сглобите на този етап. Ако сте закупили рамков комплект, следвайте инструкциите за сглобяване. Моля, обърнете внимание, че може да се наложи да разглобите определени зони, за да улесните свързването или да премахнете (скриете) електрическите елементи. Целта е да се гарантира, че нищо не е хлабаво, всички проводници са здраво закрепени и нищо не може да изпадне от рамката или да се заплете.
Инсталиране
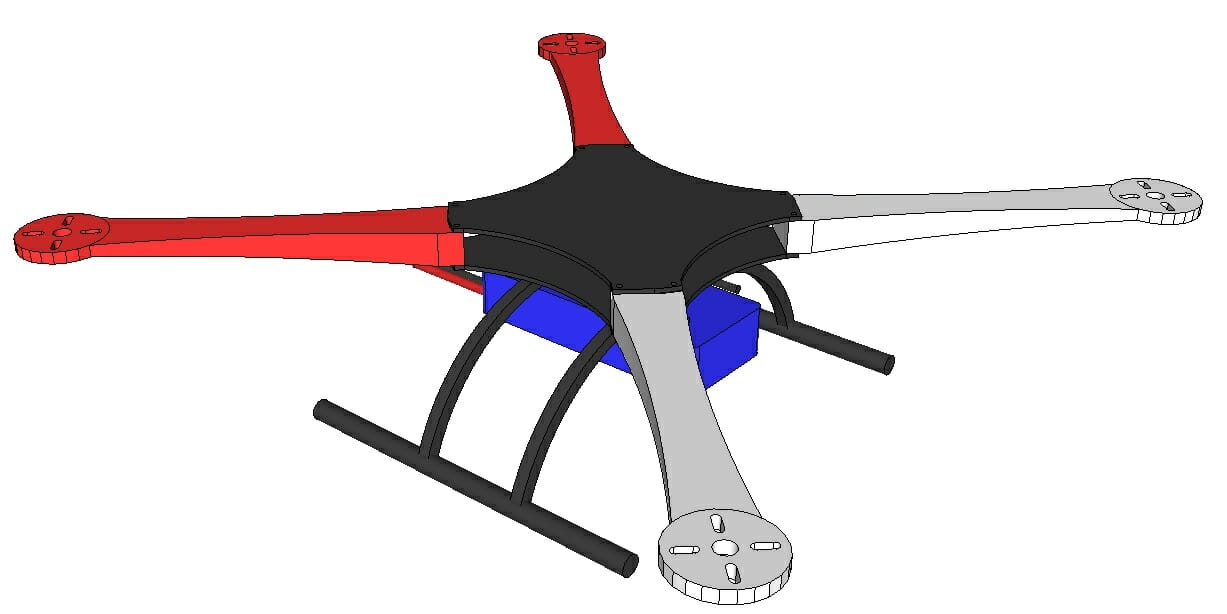
Местоположение на батерията.
Батерията, използвана за захранване, често е най -тежкият елемент на БЛА и може да варира от 1/4 до 1/2 от общото му тегло. Следователно мястото на инсталирането му е много важно. Идеалното място за основната батерия трябва да бъде в центъра на самолета, така че всички двигатели да могат да се справят с приблизително еднакъв товар. Ако батерията е разположена по -близо до задната част на самолета, задните двигатели ще трябва да осигурят по -голяма тяга от предните двигатели и следователно максималната обща тяга ще бъде ограничена (когато задните двигатели са с пълна тяга, няма да има тяга върху предните двигатели). Като има предвид, че обичайният подход при проектирането с много ротори е да поддържаме самолета симетричен около една централна линия (или поне една ос), така че батерията трябва да бъде поставена по протежение на тази осева линия, а не да се измества в едната или другата страна...
След това ще трябва да решите на каква височина да поставите батерията. Има няколко места, където батерията може да бъде поставена:
- Под рамката (самолетът ще бъде тежък отдолу, по -стабилен и по -малко акробатичен).
- Директно под двигателите (обикновено вътре в рамката); може би едно от най -добрите места.
- На същата височина като двигателите или роторите (например монтирани на върха на рамката).
- Над витлата (БЛА ще бъде по -тежък отгоре и по -податлив на преобръщане).
За най -добро представяне, в идеалния случай батерията трябва да бъде поставена в позиция 3 по -горе. Позиция 4 създава ефект на обърнато махало и ако БПЛА се наклони над определен ъгъл, дронът ще се обърне. Позиция 1 ще създаде доста стабилна платформа, която по своята същност има тенденция да остане на ниво, но е изключително неподходяща за акробатика. Затова повечето дизайнери избират позиция 2 и поставят батерията директно под рамката или вътре в нея. Този подход освобождава място под рамката за полезни товари като системата за окачване и пространство отгоре, за да бъде полетният контролер и друга електроника възможно най -достъпна.
Монтаж на батерията
Има много често срещани начини за закрепване на батерията към рамката, включително:
- велкро ленти
- Самозалепващи се велкро (едната страна е залепена към батерията, а другата към рамката)
- В рамката
Велкро лентите са най-често срещани за средни „стандартни ”Персонализирани безпилотни летателни апарати с размери Докато рамковата кутия се среща най -често при търговските дронове, рамките на такива безпилотни летателни апарати са създадени под налягане и оставят място вътре специално за конкретна батерия. В идеалния случай велкро трябва да се използва само ако батерията е относително лека; вместо една къса секция в центъра се препоръчва да залепите една лента по цялата дължина на батерията. Ако използвате ленти с велкро и установите, че батерията има тенденция да изскача поради липса на захващане, препоръчително е да добавите гумени ленти там, където батерията докосва лентите. Не се препоръчва използването на лепило за закрепване на батерията към рамката. Ако не използвате безпилотен летателен апарат, извадете батерията и я съхранявайте в сейф LiPo или керамичен резервоар.
Зареждане на батерията
Много е вероятно да сте избрали литиево -полимерна (LiPo) или друга литиева батерия. Повечето LiPo батерии над 3.7V имат отделен кабел за зареждане с много-пинов конектор за зареждане, докато захранващият кабел може да бъде идентифициран чрез наличието на дву-пинов конектор с по-големи проводници, способни да издържат на големи разрядни токове. Съединителят за зареждане обикновено има един контакт за всяка банка батерии, както и общ контакт за заземяване.
Поради опасностите, свързани с LiPo батериите (водород и електричество), обичайната практика е напълно да извадите батерията от дрона, когато не се използва, и да я поставите в LiPo Safe чанта. Същата торба се използва при зареждане на батерията (свържете батерията към зарядното устройство, поставете батерията в чантата (оставяйки зарядното устройство извън чантата) и я затворете (обикновено има клапа с велкро).
.Поставяне и монтаж на полетния контролер
В идеалния случай полетният контролер трябва да бъде разположен в центъра на дрона на същата височина като двигателите. Ако това не е възможно, тогава контролерът може да бъде поставен малко по -висока или по -ниска посока наляво или надясно и избягвайте да я монтирате напред или назад. Ако сте закупили рамка за БЛА, те често имат монтажни отвори за полетния контролер, които са на оптималното място. може да се фиксира по някой от следните основни начини:
- Винтове / гайки / стойки (основни)
- Двустранна лента (уверете се, че е достатъчно здрава)
- Двустранна лента от пяна (за постигане амортизационен ефект)
- Каучукови амортизиращи втулки (за силно амортизиране)
Някои полетни контролери имат или могат да имат допълнителен защитен калъф.
На този етап трябва да имате напълно сглобен и свързан БЛА, с изключение на витлата. Урок 6 включва настройка и тестване на предавателя, софтуера за полетен контролер, проверка преди полет и първи полет.







