Obsah
- DIY dron: Lekce 1. Terminologie.
- Dron udělej si sám: Lekce 2. Rámy.
- Dron udělej si sám: Lekce 3. Elektrárna.
- Dron udělej si sám: Lekce 4. Ovladač letu.
- Dron udělej si sám: Lekce 5. Sestavení.
- Dron udělej si sám: Lekce 6. Kontrola výkonu.
- Dron udělej si sám: Lekce 7. FPV a vzdálenost.
- Dron s vlastními rukama: Lekce 8. Letadla.
Úvod
Nyní, když jste vybrali nebo sestavili rám, je dalším krokem výběr správného pohonného ústrojí. Protože většina stávajících dronů je elektrická, zaměříme se na generování čistě elektrického pohonu pomocí bezkartáčových stejnosměrných motorů. Elektrárna zahrnuje motory, rotory (vrtule, zkrácené rekvizity), ESC a akumulátorovou baterii.
1. Motor
Z toho, jaké motory ve své sestavě použijete, bude záležet na tom, jaké maximální zatížení dron unese, a také na tom, jak dlouho může být v letu. Elektrárna musí nutně sestávat z motorů stejné značky a modelu, tento přístup jí zajistí vyvážený provoz. Je třeba poznamenat, že i absolutně identické (značka / model) motory mohou mít mírný rozdíl v rychlosti, který je následně vyrovnán letovým ovladačem.
Brush vs. Brushless
V kartáčovaných motorech se navinutý rotor otáčí uvnitř statoru, na kterém jsou magnety pevně upevněny. U bezkartáčových motorů je vše na řadě; vinutí je pevně připevněno k vnitřní straně statoru a magnety jsou namontovány na hřídeli a otáčejí se. Ve většině případů budete uvažovat pouze bezkartáčové stejnosměrné motory (BC). Motory tohoto typu jsou široce používány v amatérském rádiovém průmyslu k montáži produktů od vrtulníků a letadel po pohonné systémy v automobilech a člunech.
Bezkartáčové motory na palačinky mají větší průměr, jsou plošší a obecně mají vysoký točivý moment a nižší KV (podrobnosti níže). Malé UAV (obvykle velikosti dlaně) často používají malé kartáčované motory kvůli jejich nižším nákladům a jednoduchému dvouvodičovému ovladači. Přestože střídavé motory přicházejí v různých velikostech a specifikacích, volba menší velikosti neznamená, že bude levnější.

Inrunner vs Outrunner
Existuje několik typů bezkartáčových stejnosměrných motorů:
- Inrunner je vnitřní rotor. Vinutí je upevněno na statoru, magnety jsou upevněny na hřídeli rotoru, který se otáčí (obvykle se používá na RC lodích, helikoptérách a automobilech kvůli vysokému KV).
- Outrunner - vnější rotor. Magnety jsou připevněny ke statoru, který se otáčí kolem stacionárního vinutí. Spodní část motoru je pevná.(motory tohoto typu mají zpravidla větší točivý moment).
- Hybrid Outrunner - Technicky se jedná o „Outrunner“, ale implementovaný v balíčku „Inrunner“. Tento přístup umožnil kombinovat v jednom typu točivý moment „Outrunner“ a absenci vnějších rotačních prvků jako u motorů typu „Inrunner“.
KV
KV hodnocení - max. počet otáček, které může motor vyvinout bez ztráty výkonu při daném napětí. Pro většinu vícerotorových UAV je důležitá nízká hodnota KV (například od 500 do 1 000), protože to pomáhá zajistit stabilitu. Zatímco pro akrobatický let bude relevantní hodnota KV mezi 1 000 a 1 500, v tandemu s rotory menšího průměru (vrtule). Řekněme, že hodnota KV pro konkrétní motor je 650 ot / min, pak při napětí 11,1 V se motor bude otáčet rychlostí: 11,1 × 650 = 7215 ot / min, a pokud použijete motor při nižším napětí (řekněme 7,4 V)), pak bude rychlost otáčení: 7,4 × 650 = 4810 ot / min. Je však důležité poznamenat, že použití nízkého napětí obecně znamená vyšší spotřebu proudu (výkon = proud × napětí).
Tah
Někteří výrobci bezkartáčových motorů mohou ve specifikaci specifikovat informace o maximálním možném tahu (tahu) generovaném motorem ve spojení s doporučeným hlavním rotorem. Měrnou jednotkou tahu je obvykle kilogram (Kg / Kg), libra (Lbs) nebo Newton (N). Pokud například stavíte kvadrokoptéru a znáte hodnotu tahu jednoho motoru = až 0,5 kg v prostoru s 11palcovým rotorem, pak na výstupu lze zvednout čtyři takové motory při maximálním tahu: 0,5 kg × 4 = 2 kg. Pokud je tedy celková hmotnost vaší kvadrokoptéry o něco menší než 2 kg, pak s takovou elektrárnou vzlétne pouze při maximálních otáčkách (maximální tah). V tomto případě bude důležité buď zvolit výkonnější svazek rotorových motorů, který zajistí větší tah, nebo snížit celkovou hmotnost dronu. Při max. tah elektrárny = 2 kg, hmotnost dronu by neměla být větší než polovina této hodnoty (1 kg včetně hmotnosti samotných motorů). Podobný výpočet lze provést pro jakoukoli konfiguraci. Předpokládejme, že hmotnost hexakoptéry (včetně rámu, motorů, elektroniky, příslušenství atd.) Je 2,5 kg. To znamená, že každý motor pro takovou sestavu musí poskytovat (2,5 kg ÷ 6 motorů) × 2 = 0,83 kg tah (nebo více). Nyní víte, jak vypočítat optimální tah motorů na základě celkové hmotnosti, ale než se rozhodnete, doporučujeme vám seznámit se s níže uvedenými částmi.
Další úvahy
- Konektory: Stejnosměrné kartáčované motory mají dva konektory "" a "-". Výměna vodičů v místech mění směr otáčení motoru.
- Konektory: Bezkartáčové stejnosměrné motory mají tři konektory. Chcete -li zjistit, jak je připojit a jak změnit směr otáčení, přečtěte si níže uvedenou část ESC.
- Vinutí: Vinutí ovlivňují KV motorů. Pokud potřebujete nejnižší hodnotu KV, ale dáte přednost točivému momentu, je nejlepší obrátit svou pozornost na bezkartáčové stejnosměrné motory typu Pancake.
- Montáž: Většina výrobců má obecné schéma zapojení stejnosměrných motorů pro stejnosměrné motory, což umožňuje rámcovým společnostem vyhnout se výrobě takzvaných adaptérů. Šablona je obvykle metrická, se dvěma otvory 16 mm od sebe a dvěma dalšími otvory 19 mm od sebe (90 ° k první).
- Závit: Montážní závit použitý k připevnění bezkartáčového motoru k rámu se může lišit. Obvyklé metrické velikosti šroubů jsou M1, M2 a M3, imperiální velikosti mohou být 2–56 a 4–40.
2. Hlavní rotory (vrtule)
Hlavní rotory (vrtule, zkrácené rekvizity) pro vícerotorové UAV pocházejí z vrtulí rádiem řízených letadel. Mnozí se budou ptát: proč nepoužívat listy vrtulníků? I když to již bylo provedeno, představte si rozměry hexacopteru s listy helikoptéry. Za zmínku také stojí, že vrtulníkový systém vyžaduje změnu rozteče lopatek, a to výrazně komplikuje konstrukci.
Můžete se také zeptat, proč nepoužít proudový motor, dvouproudový motor, turbovrtulový motor atd.? Určitě jsou neuvěřitelně dobří v poskytování velkého tahu, ale také vyžadují hodně energie. Pokud je hlavním zájmem dronu pohybovat se velmi rychle, než se vznášet v omezeném prostoru, může být dobrou volbou jeden z výše uvedených motorů.
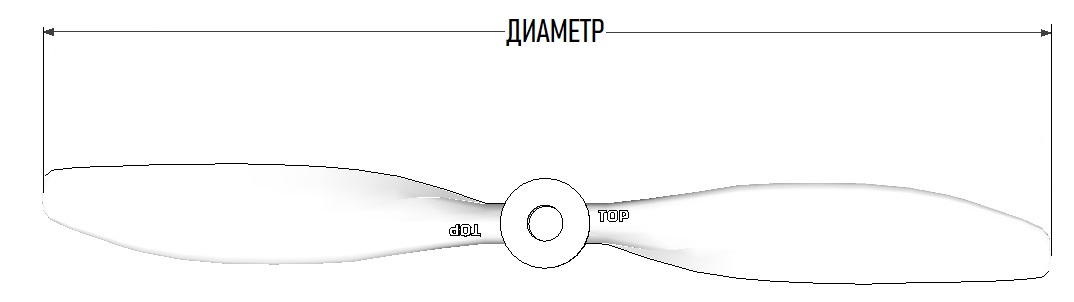
Listy a průměr
Hlavní rotor většiny vícerotorových UAV má dva nebo tři listy. Nejvíce používané vrtule jsou se dvěma lopatkami. Nepředpokládejte, že přidáním dalších lopatek se automaticky zvýší tah; každý list pracuje v proudu narušeném předchozím listem, což snižuje účinnost vrtule. Hlavní rotor malého průměru má menší setrvačnost, a proto je snazší zrychlovat a zpomalovat, což je důležité pro akrobatický let.

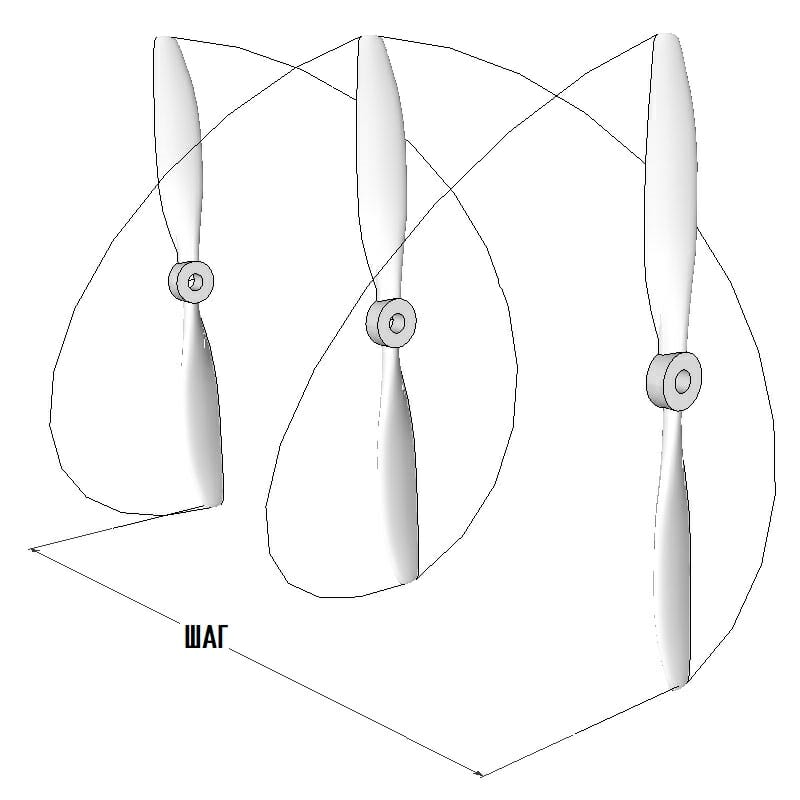
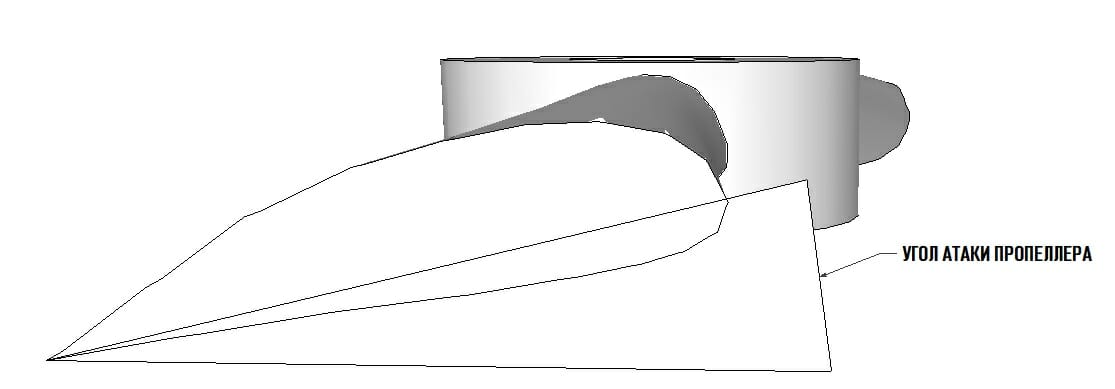
Rozteč / Úhel náběhu / Účinnost / Tah
Tah generovaný hlavní rotor závisí na hustotě vzduchu, počtu otáček vrtule, jeho průměru, tvaru a oblasti lopatek a také na jeho rozteči. Účinnost vrtule souvisí s úhlem náběhu, který je definován jako rozteč lopatky minus úhel šroubovice (úhel mezi výslednou relativní rychlostí a směrem otáčení listu). Účinnost sama o sobě je poměrem výstupního výkonu ke vstupnímu výkonu. Většina dobře navržených vrtulí má účinnost více než 80%. Úhel náběhu je ovlivněn relativní rychlostí, takže vrtule bude mít při různých otáčkách motoru různou účinnost. Účinnost je také silně ovlivněna náběžnou hranou listu hlavního rotoru a je velmi důležité, aby byla co nejhladší. I když by byl nejvhodnější design s proměnným stoupáním, dodatečná složitost vyžadovaná nad vlastní jednoduchostí více rotorů znamená, že vrtule s proměnným stoupáním se téměř nikdy nepoužívá.
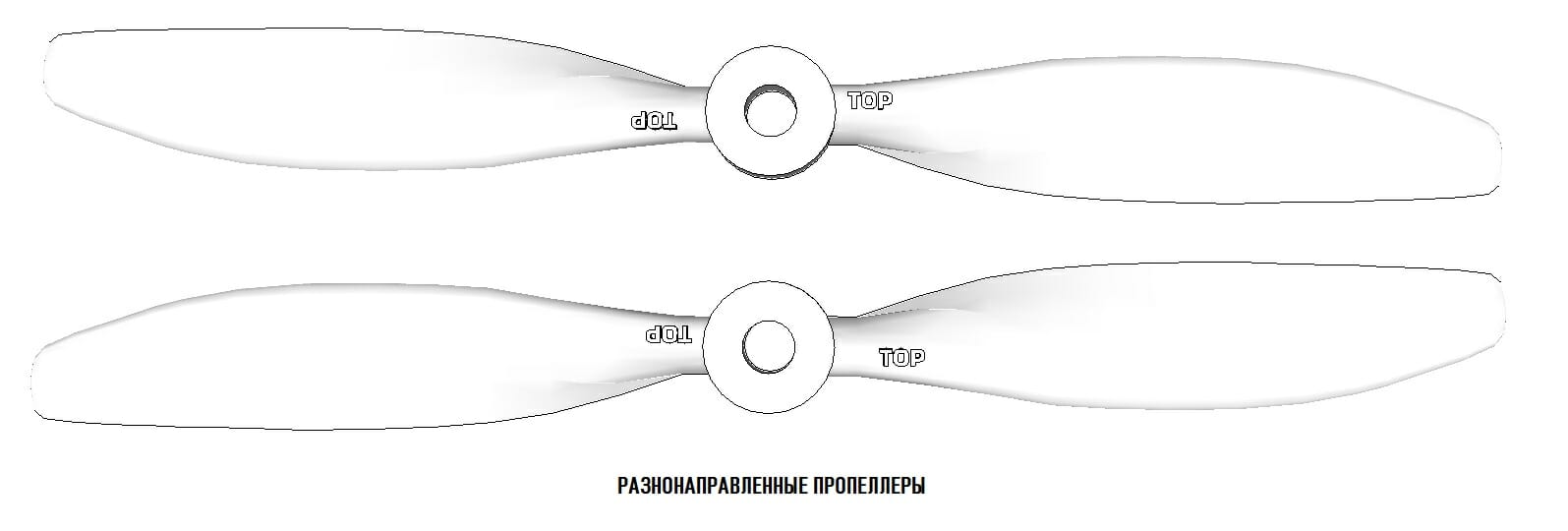
Rotace
Rotory jsou určeny pro otáčení ve směru hodinových ručiček (CW) nebo proti směru hodinových ručiček (CCW). Směr otáčení je indikován sklonem listu ( pohled na vrtuli od konceVtailY6X8
Materiály provedení
Materiál (y) použitý k výrobě rotorů (vrtulí) může mít mírný vliv na let výkon, ale bezpečnost by měla být nejvyšší prioritou, zvláště pokud jste začátečník a nezkušený.
- Plast (ABS / nylon atd.) je nejoblíbenější volbou, pokud jde o vícemotorové bezpilotní prostředky. Je to do značné míry způsobeno nízkými náklady, slušnými letovými vlastnostmi a exponenciální trvanlivostí. Obvykle je v případě havárie rozbitá alespoň jedna vrtule, a zatímco zvládnete dron a naučíte se létat, vždy budete mít spoustu rozbitých rekvizit. Tuhost a odolnost proti nárazu plastového šroubu lze zlepšit vyztužením uhlíkovými vlákny (karbon), tento přístup je max. efektivní a ne tak drahá ve srovnání s plnohodnotnou vrtulí a uhlíkovými vlákny.
- Polymer vyztužený vlákny (uhlíková vlákna, nylon vyztužený uhlíkem atd.) -je "pokročilou" technologií v mnoha vztazích. Díly z uhlíkových vláken se stále nedají příliš snadno vyrobit, a proto za ně zaplatíte více než za běžný plastový šroub s podobnými parametry. Vrtule vyrobená z uhlíkových vláken se hůře láme nebo ohýbá, a proto pokud narazí, způsobí větší škody na všem, s čím přijde do styku. Současně jsou uhlíkové vrtule obecně dobře zpracované, tužší (zajišťující minimální ztrátu účinnosti), zřídka vyžadují vyvažování a mají nižší hmotnost než jakýkoli jiný materiál. Doporučuje se uvažovat o takových vrtulích až poté, co se úroveň pilotáže uživatele stane pohodlnou.
- Dřevo je zřídka používaným materiálem pro výrobu vícerotorových UAV rotorů, protože jejich výroba vyžaduje mechanické zpracování, což později činí dřevěné vrtule dražšími než plastové. Strom je přitom docela silný a nikdy se neohne. V rádiem řízených letadlech se stále používají dřevěné vrtule.



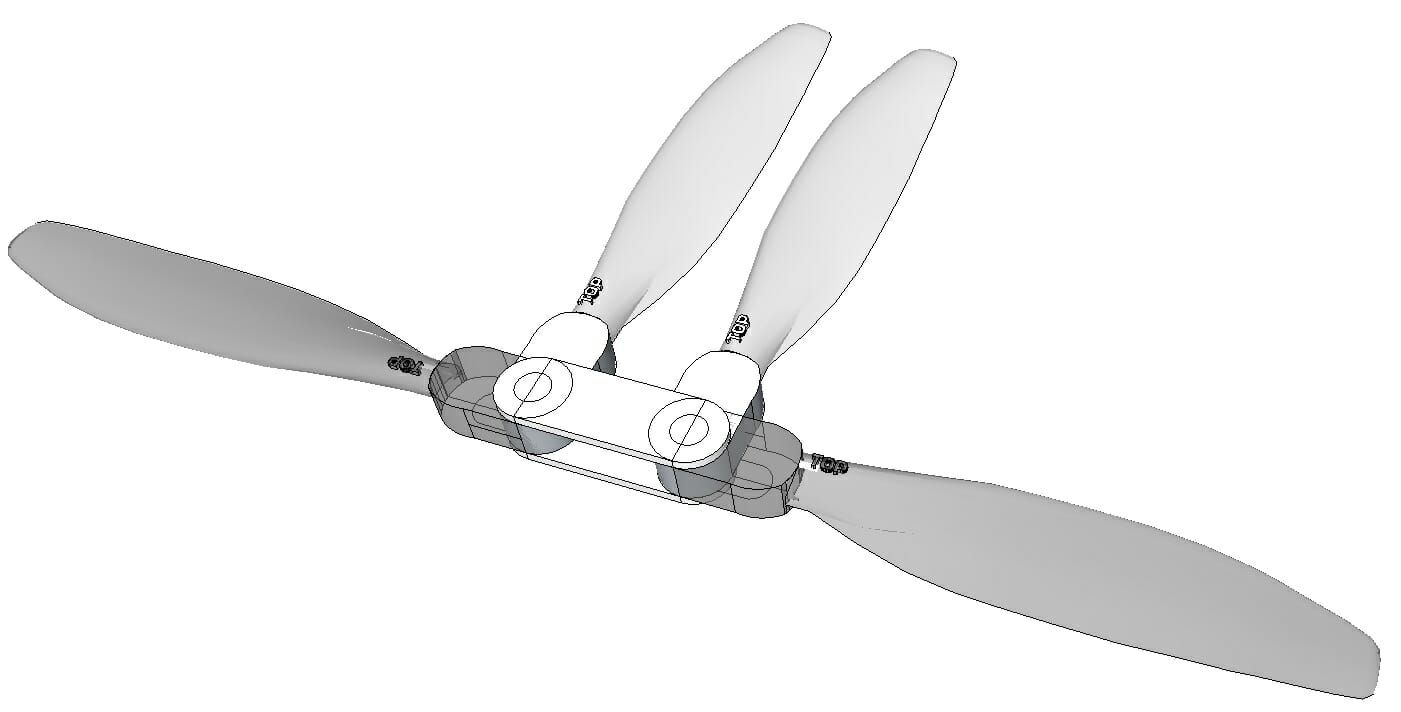
Skládací
Skládací podpěry mají středovou část, která se spojuje se dvěma otočnými lopatkami. Když se střed (který je spojen s výstupním hřídelem motoru) otáčí, působí na lopatky odstředivé síly, které je tlačí ven a v podstatě činí vrtuli „tuhou“, se stejným účinkem jako klasická neskládací vrtule. Díky nízké poptávce a velkému počtu požadovaných dílů jsou skládací vrtule méně časté. Hlavní výhodou skládacích rekvizit je kompaktnost a v kombinaci se skládacím rámem mohou být přepravní rozměry dronu výrazně menší než letové. Souběžnou výhodou skládacího mechanismu je absence potřeby, v případě havárie, úplné výměny vrtule, bude stačit vyměnit pouze poškozený list.
Instalace
Stejně jako UAV mohou mít rotory širokou škálu velikostí. V průmyslu tedy existuje řada „standardních“ průměrů hřídelí motoru. V této souvislosti je hlavní rotor často dodáván s malou sadou adaptačních kroužků (vypadají jako podložky s otvory různých průměrů uprostřed), které jsou instalovány ve středovém otvoru vrtule
Šroub lze připevnit k motoru podle toho, jaký způsob montáže váš motor podporuje. Pokud z hřídele motoru nevyplývají žádné možnosti upevnění (závitové připojení, různá upevňovací zařízení atd.), Pak se používají speciální adaptéry, jako jsou stojany a upínací kleštiny.
- Propsaver
- Upínací kleština
Bezkartáčové motory s vnějším rotorem (typ "Outrunner") mají zpravidla v horní části několik závitových otvorůje neméně oblíbenou možností uchycení vrtule k hřídeli motoru BC
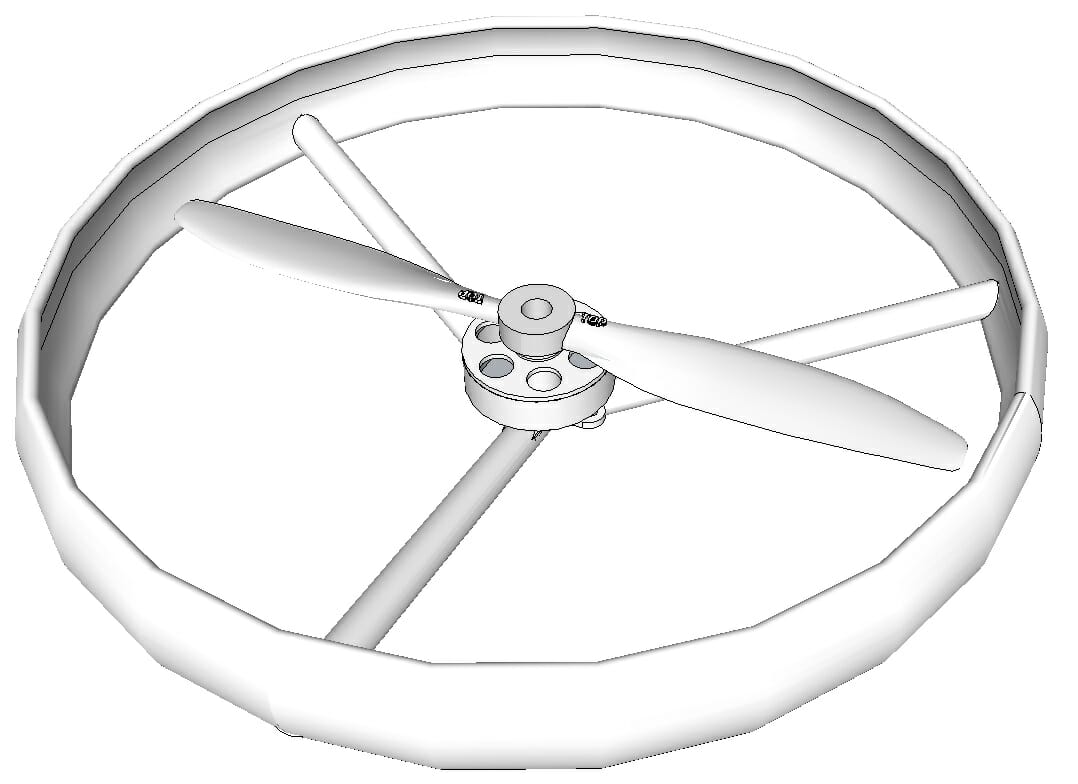
Ochrana rotorů
Ochrana rotorů - navržena tak, aby vylučovala přímý kontakt elektrárny UAV s protijedoucím objektem, čímž byla zachována její integrita a provozuschopnost, jakož i aby se zabránilo zranění rychle rotujících vrtulí v důsledku kolizí s lidmi a zvířaty. Kryty vrtulí jsou připevněny k hlavnímu rámu. V závislosti na verzi může buď částečně překrývat pracovní oblast elektrárny, nebo úplně (prstencová ochrana). Ochrana vrtule se nejčastěji používá na malých (hračkových) UAV. Použití ochranných prvků v sestavě také přináší řadu kompromisů, včetně:
- Může způsobit nadměrné vibrace.
- Obecně odolává lehkým úderům.
- Může snížit tah, pokud je pod vrtuli umístěno příliš mnoho montážních patek.
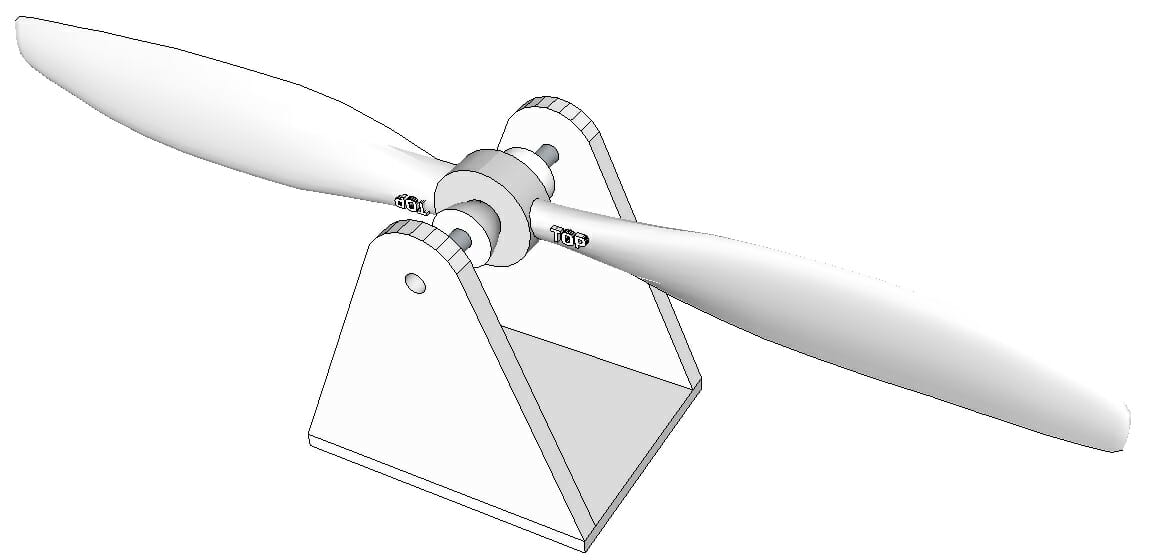
Vyvažování
Ke špatnému vyvážení dochází u většiny levných vrtulí. Abyste se o tom ujistili, nemusíte chodit daleko, stačí vložit tužku do středového otvoru šroubu (zpravidla při nerovnováze bude jedna strana těžší než druhá). Proto se důrazně doporučuje vyvážit rekvizity před jejich instalací na motory. Nevyvážená vrtule způsobí nadměrné vibrace, které následně negativně ovlivní výkon letového ovladače (projevuje se nesprávným chováním dronu za letu), nemluvě o zvýšení hluku, zvýšeném opotřebení prvků elektrárny a zhoršení kvalita natáčení zavěšené kamery.
Vrtuli lze vyvažovat různými způsoby, ale pokud stavíte dron od nuly, pak v arzenálu nástrojů musí být levný vyvažovač vrtulí, který vám umožní snadno a jednoduše určit nerovnováhu hmotnosti ve vrtuli. Chcete -li vyrovnat hmotnost, můžete buď brousit nejtěžší část podpěry (středová část listu je rovnoměrně vybroušena a v žádném případě neodříznout část vrtule), můžete také vyvážit lepením kusu pásky (tenké) na lehčí čepel (rovnoměrně přidávejte segmenty, dokud není dosaženo rovnováhy). Všimněte si toho, že čím dále od středu provedete vyvažovací upgrade (broušení nebo přidání pásu) vrtule, tím větší bude účinek na základě principu točivého momentu.
3. ESC
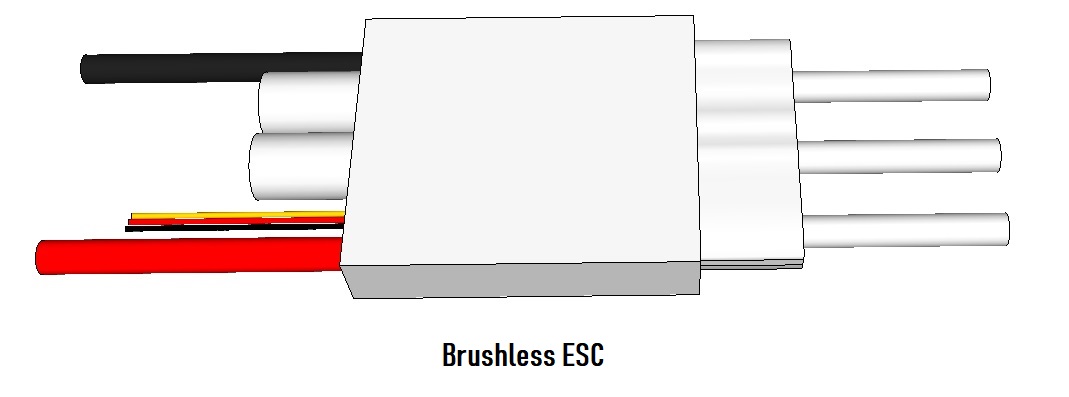
ESC (anglický elektronický regulátor rychlosti; rus.elektronický regulátor rychlosti) - umožňuje letovému regulátoru ovládat rychlost a směr motoru. Při správném napětí musí ESC vydržet max. proud, který může motor spotřebovat, a také omezit proud procházející fází během přepínání. Většina dronů hobby ESC umožňuje otáčení motoru pouze v jednom směru, ale se správným firmwarem mohou pracovat v obou směrech.
Připojení
Zpočátku může být ESC matoucí, protože pro jeho připojení je k dispozici několik vodičů / pinů / konektorů. strany (ESC může být s pájenými konektory nebo bez nich).
- Napájení: Dva silné vodiče (obvykle černé a červené) jsou dodávány pro napájení z rozvodné desky / svazku, do kterého přichází energie přímo z hlavní baterie letadla.
- 3 konektory: Na opačné straně ovladače jsou k dispozici tři konektory pro připojení ke třem kulovým konektorům (obvykle dodávaným s motory) na bezkartáčovém motoru. Použití konektorů při připojení ESC umožňuje v případě potřeby (v případě poruchy) rychlou výměnu ovladače bez použití páječky. Stává se, že konektory ve tvaru kulky přicházející s motorem neodpovídají konektorům na regulátoru, v takovém případě je jednoduše vyměňte za vhodné. Který ze tří je „plus“ a který je „mínus“? Referenční bod je jednoduchý, přicházející kladný vodič z baterie, přechází do kladného stavu na ESC, podobně s mínusem.
- 3pinový servo konektor R / C s tenkými dráty: přes který je zpracováván signál přicházející z přijímače, z nichž jeden vodič je signál (přenos signálu plynu do ESC nebo vstup), druhý „mínus“ (nebo uzemnění) a kladný vodič (nepoužívá se, pokud není vestavěný BEC; s vestavěným BEC je to 5V napájecí výstup, který lze později použít k napájení palubní elektronika).
BEC
V počátcích modelování letadel byl jako elektrárna používán spalovací motor a palubní elektronika byla poháněna malým baterie. S příchodem elektrické trakce a regulátorů (ESC) do nich začaly zahrnovat takzvaný obvod pro odstranění baterie-BEC (anglicky anglicky Eliminator Circuit; nebo palubní měnič výkonu; zpravidla poskytuje další zdroj proudu s napětím 5 V při proudu 1 A nebo vyšším). Jinými slovy, je to měnič napětí použitý v sestavě LiPo na napětí pro napájení palubní elektroniky dronu.
Při montáži multirotoru musí být všechny ESC připojeny k letovému ovladači, ale je vyžadován pouze jeden BEC, jinak mohou při napájení stejných vedení nastat problémy. Protože na ESC obvykle neexistuje způsob, jak deaktivovat BEC, je nejlepší odstranit červený vodič () a zabalit jej elektrickou páskou pro všechny kromě jednoho ESC. Je také důležité nechat černý vodič (zem) pro společnou zem.
Firmware
Ne všechny ESC na trhu jsou pro aplikace s více rotory stejně dobré. Je důležité pochopit, že před příchodem vícemotorových bezpilotních letounů byly střídavé motory používány především jako elektrárna pro rádiem řízená auta, letadla a helikoptéry. Většina nevyžaduje rychlou dobu odezvy ani aktualizace. ESC s integrovaným softwarem SimonK nebo BLHeli jsou schopné velmi rychle reagovat na příchozí změny, což obecně činí rozdíl mezi stabilním letem nebo havárií.
Distribuce energie
Protože každý ESC je napájen hlavní baterií, musí být konektor hlavní baterie nějak rozdělen na čtyři ESC. To se provádí pomocí desky pro distribuci energiesvazku distribuce energieDeans
4. Baterie
Chemie
Baterie používané v bezpilotních prostředcích jsou v současnosti výhradně lithium polymer (LiPo) a složení některých z nich je docela exotické - lithium mangan nebo jiné lithium varianty. Olověná kyselina prostě není vhodná a NiMh / NiCd jsou na svou kapacitu stále příliš těžké a často nemohou zajistit požadované vysoké rychlosti vybíjení. LiPo nabízí vysoký výkon a rychlost vybíjení a přitom je lehký. Nevýhodou jsou jejich relativně vysoké náklady a neustálé bezpečnostní problémy (nebezpečí požáru).
Napětí
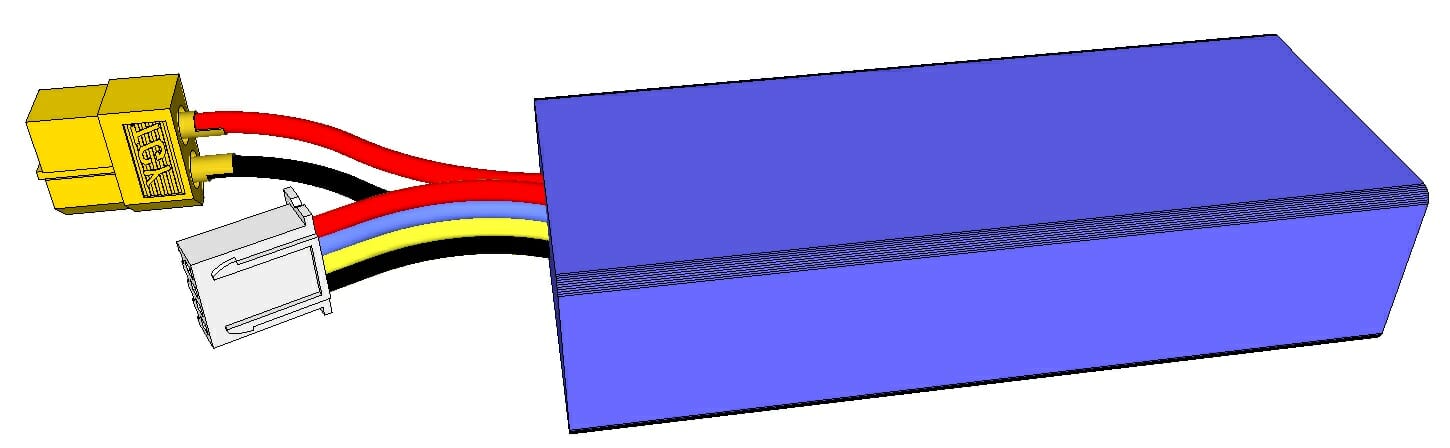
V praxi potřebujete pro svůj UAV pouze jednu baterii. Napětí této baterie se musí shodovat s motory BK, které jste vybrali. Téměř všechny baterie, které se dnes používají, jsou založeny na lithiu a obsahují několik článků (plechovek) po 3,7 V, kde 3,7 V = 1 S (tj. Baterie s jednou plechovkou; 2 S jsou baterie se dvěma plechovkami atd.). Proto baterie označená 4S bude mít pravděpodobně nominální hodnotu 4 × 3,7 V = 14,8 V. Také počet plechovek vám pomůže určit, jakou nabíječku použít. Jednobuněčná baterie s vysokou kapacitou může fyzicky vypadat jako vícečlánková baterie s nízkou kapacitou.
Kapacita
Kapacita baterie se měří v ampérhodinách (Ah). Malé baterie mohou mít kapacitu 0,1 Ah (100 mAh), kapacita baterií pro střední drony se může pohybovat od 2-3 Ah (2 000 mAh-3 000 mAh). Čím vyšší je kapacita, tím delší je doba letu a podle toho také těžší baterie. Doba letu konvenčního UAV se může pohybovat v rozmezí 10–20 minut, což se může zdát krátkodobé, ale měli byste pochopit, že dron během letu neustále bojuje s gravitací a na rozdíl od letadla nemá povrchy (křídla), které poskytují pomoc ve formě optimální zvedací síly.
Míra vybití
Rychlost vybíjení lithiové baterie se měří v „C“, kde 1C je kapacita baterie (obvykle v ampérhodinách, pokud neuvažujete o dronu velikosti Dlaň). Rychlost vybíjení většiny LiPo baterií je minimálně 5C (pětinásobek kapacity), ale protože většina motorů používaných ve vícerotorových UAV spotřebovává velké množství proudu, baterie musí být schopna se vybíjet neuvěřitelně vysokým proudem, což je obvykle asi 30 A nebo více.
Bezpečnost
LiPo baterie nejsou zcela bezpečné, protože obsahují stlačený vodíkový plyn a mají tendenci hořet a / nebo explodovat, když něco je špatně. Pokud tedy máte jakékoli pochybnosti o zdraví baterie, v žádném případě ji nepřipojujte k dronu ani k nabíječce - považujte ji za „vyřazenou z provozu“ a řádně ji zlikvidujte. Světelné signály, že s baterií není něco v pořádku, jsou promáčkliny nebo otoky (tj. Únik plynu). Při nabíjení baterie LiPo je nejlepší použít bezpečný box LiPo (trezor na baterie). Uložení baterie

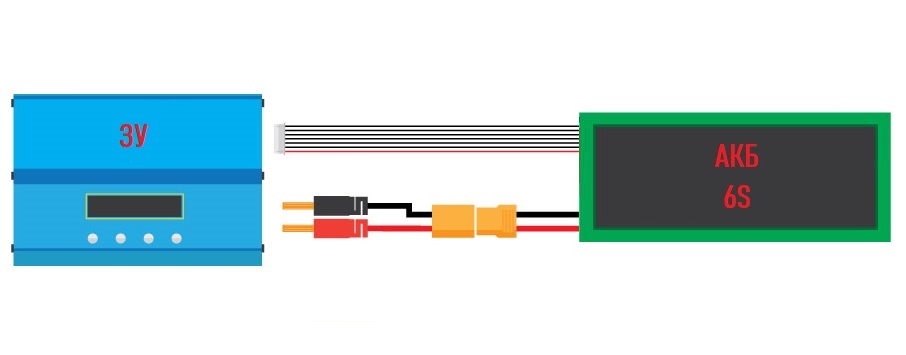
Nabíjení
Většina baterií LiPo má dva konektoryNabíječkabezpečnostní obavy související s lithium -polymerovými bateriemi
.Mounting
Baterie je nejtěžším prvkem dronu, proto by měla být instalována na středové úvrati, aby bylo zajištěno stejné zatížení motorů. Baterie nezahrnuje žádné speciální upevnění (zejména samořezné šrouby, které mohou poškodit LiPo a způsobit požár), takže některé dnes používané způsoby montáže zahrnují popruhy na suchý zip, gumové, plastové přihrádky a další. Nejběžnější možností upevnění baterie je zavěšení baterie pod rám pomocí pásku na suchý zip.







