Indhold
- DIY -drone: Lektion 1. Terminologi.
- Gør-det-selv drone: Lektion 2. Rammer.
- Gør-det-selv drone: Lektion 3. Kraftværk.
- Gør-det-selv drone: Lektion 4. Flyvekontroller.
- Gør-det-selv drone: Lektion 5. Montering.
- Gør-det-selv drone: Lektion 6. Ydelseskontrol.
- Gør-det-selv drone: Lektion 7. FPV og afstand.
- Drone med egne hænder: Lektion 8. Fly.
Introduktion
Nu hvor du har valgt alle hovedkomponenterne til din UAV, kan du begynde at samle. Denne vejledning dækker almindelige fejl ved samling af en multi-rotor UAV, sammen med nogle nyttige tips til tuning. Denne lektion dækker ikke emner som et kamera / FPV -system, enheder med lang rækkevidde eller andet tilbehør (vi dækker i 7 lektioner).
Komponenter, du skal have på dette stadium:
- Ramme (købt eller håndlavet)
- Motorer, ESC'er, propeller, batteri, oplader
- Strømfordelingstavle / sele
- Flyvekontroller og kommunikationsenhed (foreslået radiostyring)

Fremdrift
For at nå målene med denne lektion vil din UAVs fremdriftssystem indeholde følgende komponenter:
- Motorer
- ESC
- Strømfordeling (bord eller sele)
- Batteri
- Flight Controller
Bemærk, at propeller ikke er angivet. Installer ikke propeller på dette tidspunkt! Hovedskruerne tilsluttes kun i sjette lektion. Da dette er din første drone, anbefaler vi at du foretager en "rammeløs" elektrisk forbindelse, før du installerer alt på rammen; for at kontrollere alle forbindelser og fjerne de identificerede fejl.
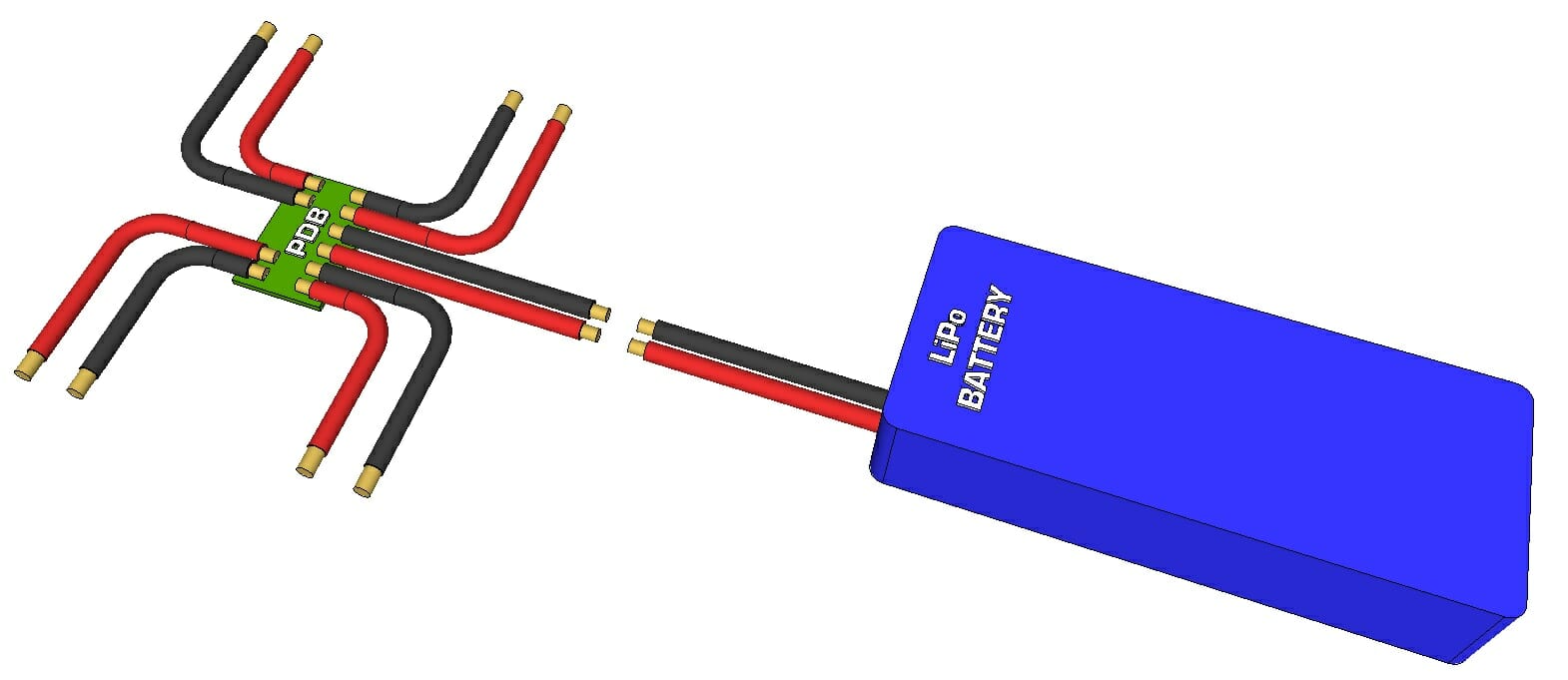
Batteri. Strømfordeling
Forbindelsen mellem batteriet og strømfordelingssystemet bør være relativt enkel, hvis de begge har den samme stik type. Hvis ja, fortsæt til næste trin. Hvis stikene er forskellige, skal du under ingen omstændigheder afskære batterikablerne for at adskille stikket; dette kan forårsage kortslutning og et ubehageligt elektrisk stød! I stedet kan du hente en adapter og bruge den mellem stikket på batteriet og stikket på strømfordelingskortet. En anden mulighed kan være at søge efter et parringsstik til batteristikket, og købe det; skær derefter det eksisterende stik fra strømfordeleren, og lod den købte udskiftning, og sørg først for, at der ikke er nogen forbindelse mellem de positive og negative stifter.
Det er vigtigt at bemærke, at de fleste multi-rotor UAV'er ikke har en tænd / sluk-kontakt, så strømmen tilføres og frakobles ved at tilslutte og afbryde hovedbatteriet fra strømfordelerstikket, så deres stik skal være sikkert fastgjort, og ledningerne / loddepunkterne er godt isolerede med varmekrympeslange og / eller elektrisk tape.
Afbryd batteriet fra strømfordeleren, inden du fortsætter.
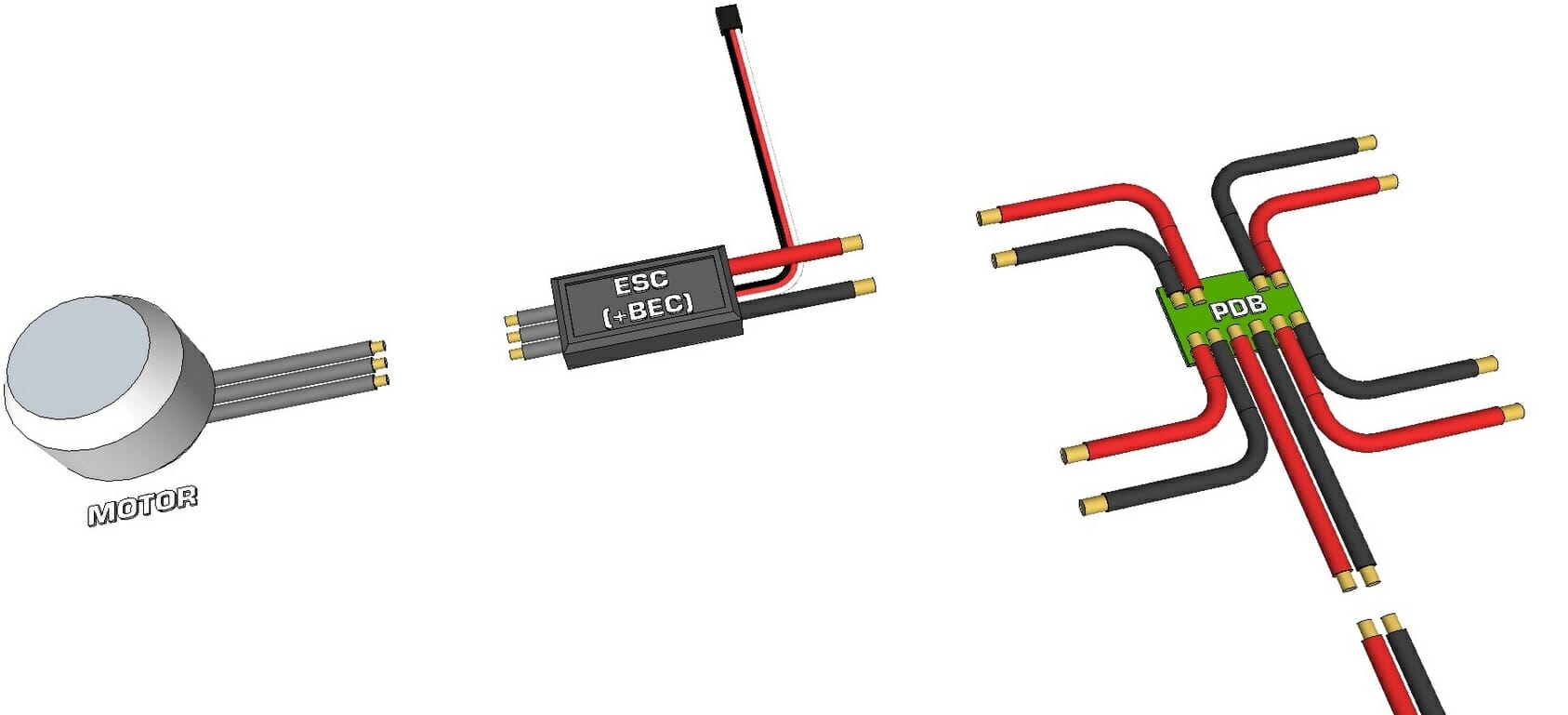
Motor. ESC. Strømfordeling
Power Distribution Board (PDP) eller kabelforbundet distribution tjener primært til at distribuere strøm fra hovedbatteriet til hver ESC. Spændingen tilføres ESC "som den er", så det er ikke nødvendigt at øge (øge) eller reducere (reducere) spændingen. Hvis din drone har fire motorer, skal du have fire ESC'er, og derfor skal dit distributionskort / trådfordeling i sidste ende opdele hovedbatteriet i fire forbindelser. Hvis din PRP har seks forbindelser, og du bygger en quadrocopter, behøver du ganske enkelt ikke at forbinde de to sidste. Hvis du bygger en hexakopter, skal din PDP distribuere strøm fra hovedbatteriet til seks forbindelser. ESC indeholder følgende ledninger:
- Et 3-leder 0,1-tommer bånd med R / C-stik, hvoraf den sorte stift normalt er slebet, den røde giver 5V output (via BEC*) og gul / hvid er signalindgangen.
- Tre separate ledninger forbindes til de tre ledninger på en børsteløs DC -motor (normalt leveret med hunkuglestik, der enten allerede er loddet eller inkluderet).
- To input -stik til tilslutning af batteriet til PDB (nogle inkluderer loddet stik med lodning, nogle er inkluderet, og nogle gange slet ikke).
*ESC'er har normalt et indbygget Battery Eliminate Circuit (eller BEC), der konverterer hovedbatterispændingen til 5V for at drive modtageren og flyvekontrolleren. 5V leveres normalt via RC -stikket fra ESC (normalt den midterste / røde pin). Du behøver kun én BEC for at drive flyvekontrolleren.
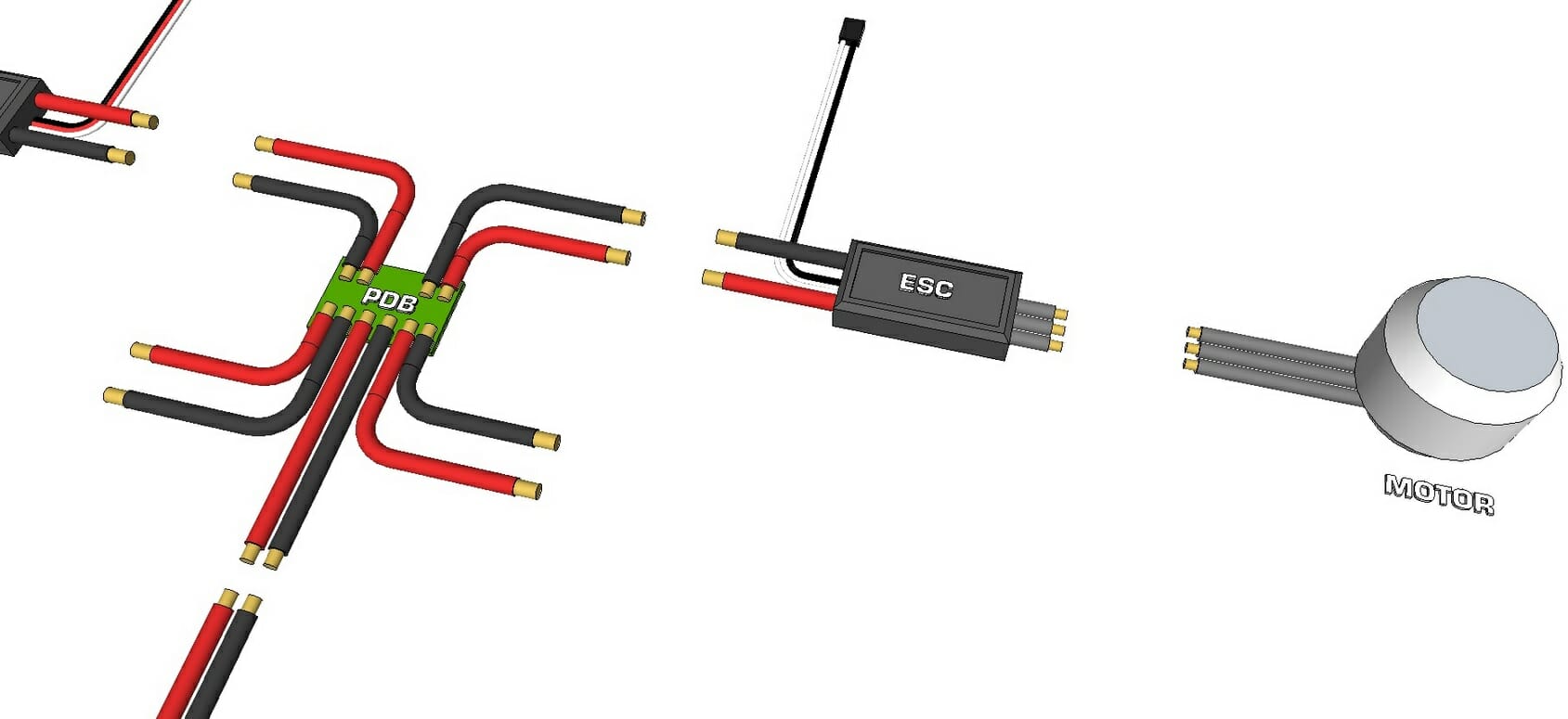
Hvis strømforsyningskortet bruger stik, der ikke matcher stik på ESC eller batteri, skal du enten købe adaptere (adaptere) eller købe nye stik og udskift dem på ESC eller PRP. Fordelen er fortsat med strømfordelingsbordet, hvis stik matcher batteriets og ESC's. Oftest kan et lithium-polymerbatteri i en UAV have DEANS-stikXT60EC3
Hvis du vil forsyne ekstra lavstrømselektronik (LED-belysning, pendel osv.), Men der ikke er nogen ekstra tilslutninger på dit strømfordelingsbord, kan du bruge batteriets opladningskabel. Det hvide opladningsstik har normalt en stift til jord og en stift til hver celle (1S, 2S, 3S osv.), Der bruges i LiPo batteri. Selvom dette stik egentlig kun er til opladning af batteriet, kan det levere en 3,7V output fra hver pin og kan bruges til at drive lavstrømselektronik, f.eks. Net eller lysdioder.
- Fjern den røde ledning fra hvert 3-bens R / C-stik på fartpiloten undtagen en. Det anbefales, at du gør dette på en sådan måde, at du altid kan tilslutte dem igen, hvis det er nødvendigt. Pak enden af hver udelukket ledning med elektrisk tape, eller brug krympeslange til isolering, så de senere ikke kan komme i kontakt med andre elektroniske elementer. Den eneste røde ledning, der efterlades uberørt, vil drive flyvekontrolleren, der bruges i samlingen.
- Tilslut de to forsyningskabler i hver ESC til fordelerkortet, og sørg for, at den røde ledning går til positiv () og den sorte ledning til negative (-).
- Hvis det strømfordelingsbord, du bruger, har sine egne R / C -stik, er det i dette tilfælde op til dig at tilslutte R / C -benene på hver ESC til R / C -stik på dette kort eller tilslut dem direkte til flyvekontrolleren.
- Tilslut hvert af de tre motorstik til de tre ESC -stik. I øjeblikket er rækkefølgen af tilslutning af disse stik ikke vigtig (hvis det påvirker rotationsretningen, bliver det korrigeret efter behov senere).
Bemærk, at hvis du beslutter dig for at fjerne eller skjule ledningerne på dette tidspunkt, skal du muligvis senere få adgang til nogle af forbindelserne ved at følge proceduren beskrevet i lektion 6, især bytte forbindelser mellem ESC'erne og en motor, så motoren roterer i den modsatte retning.

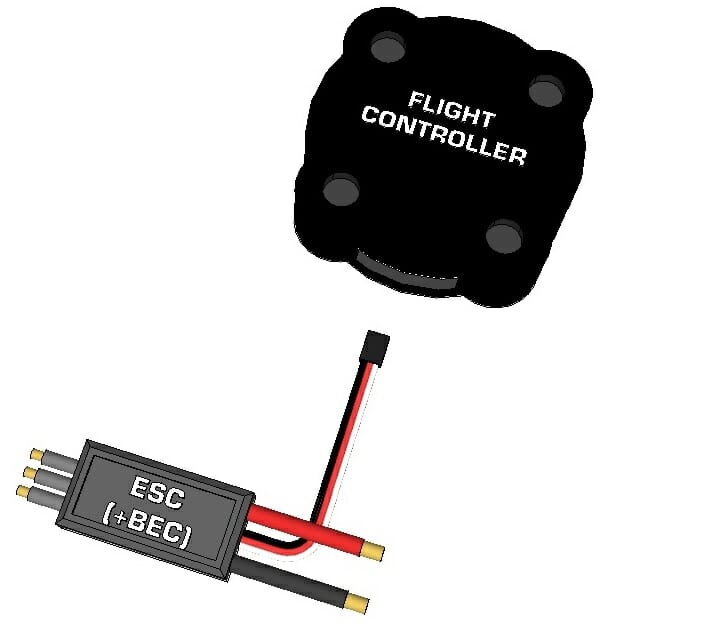
ESC. Flyvekontroller.
Du kan nu tilslutte krydstogtkontrollernes R / C -indgange til flyvekontrollen. Den flyvekontroller, du vælger, skal have et diagram, der viser, hvilke styreenhedsnåle der er forbundet til motorerne i din multirotorsamling. Dette diagram skal også vise rotationsretningen for hver motor, men igen behøver du ikke overveje retningen for nu.
- Se tilslutningsdiagrammet mellem motorerne / ESC og flyvekontrolleren i pc'ens betjeningsvejledning.
- Tilslut R / C -stik på hver ESC til de tilsvarende stifter på flyvekontrollen, sørg for, at jordledningen (normalt sort) tilsluttes jordstiften på flyvekontrolleren og signalstiften (hvid eller gul) forbinder til signalpinden på flyvekontrollen...
- Kun et af RC -stikene vil stadig have den røde (strøm) pin.
Kommunikation
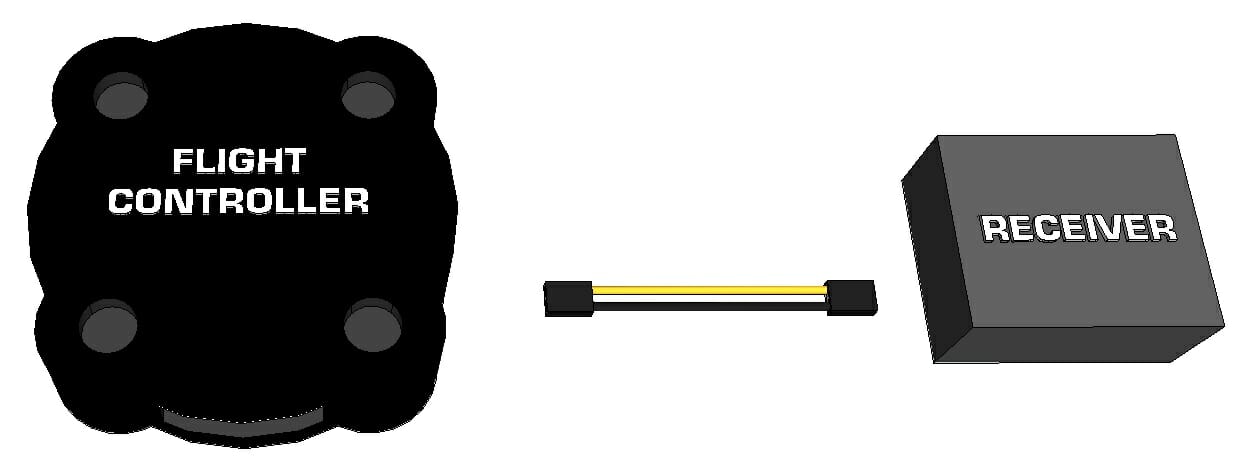
Modtager. Flyvekontroller.
Antag, at du i denne lektion har truffet valget til fordel for radiostyring som inputenhed. Hvis du vil bruge WiFi, Bluetooth eller anden inputmetode, skal du læse flyvekontrollens manual og søge efter seriel input; Dette afsnit vil beskrive, hvordan / hvor den serielle inputenhed skal tilsluttes flyvekontrolleren. Du bliver sandsynligvis nødt til at finde og tilslutte transmitteren (Tx), modtagelsen (Rx), spændingen (5V) og GND -stifterne fra den trådløse enhed til senderen, hvilket tillader Rx fra den ene til den andens Tx og omvendt.
Din RC -sender skal leveres med en passende RC -modtager. Modtageren skal være bundet til senderen, så du kan fjerne bindingsjumperen fra modtageren (hvis nogen). Sættet kan også indeholde en AA batteriholder, som er designet til at drive modtageren, men vi vil ikke bruge det, da BEC vil drive både modtageren og flyvekontrolleren. For at finde ud af hvilke RC -modtagerkanaler, der forbinder til hvilke ben på flyvekontrollen, skal du se brugervejledningen til både flyvekontrolleren og RC -systemet.
Manualen til flyvekontrollen angiver placeringen af følgende ben, der skal matches og tilsluttes modtageren:
- Gashåndtag
- Stigning
- Kæft
- Rulle
- Aux -kontakter 1, 2, 3 osv.
Du kan nu foretage følgende tilslutninger:
- Læs flyvekontrollens manual for at se, hvilken R / C -indgangsstift der er tilsluttet med hvilken af ovenstående funktioner.
- Læs sendermanualen til hvilken kanal der er knyttet til hver funktion.
- Nogle RC -sendere kan omprogrammeres for at ændre funktionen for hver kontakt. Hvis du beslutter dig for at ændre en indgang (joystick eller switch), skal du kun gøre det, efter at du har kontrolleret, hvilken kanal på modtageren der svarer til hvilken funktion. Gashåndtag, pitch, yaw og roll bør altid være forbundet med to pinde / joysticks, ikke kontakter eller knapper.
- Tilslut gashåndtagskanalen på modtageren til gashåndtaget på flyvekontrollen.
- Tilslut Pitch -kanalen på modtageren til Pitch -indgangen på flyvekontrolleren.
- Tilslut Yaw -kanalen på modtageren til Yaw -indgangen på flyvekontrolleren.
- Tilslut GND på flyvekontrolleren (normalt den tredje række af ben) til GND på modtageren (normalt den tredje række af ben).
- Hvis ekstraindgangen vil blive brugt, skal du tilslutte Aux 1 på modtageren til Aux 1 på flyvekontrollen og så videre.
Du kan bruge 3-bens servotråde til hver kanal, men kun en af kanalerne (kan være hvilken som helst) skal have spænding og jord; resten har kun brug for en signalkabel. Alle forbindelser kan være GND til GND, selvom der kun kræves en. Endnu en gang behøver modtageren ikke et separat batteri, da det vil blive drevet af flyvekontrolleren, som drives af BEC fra en af ESC'erne.
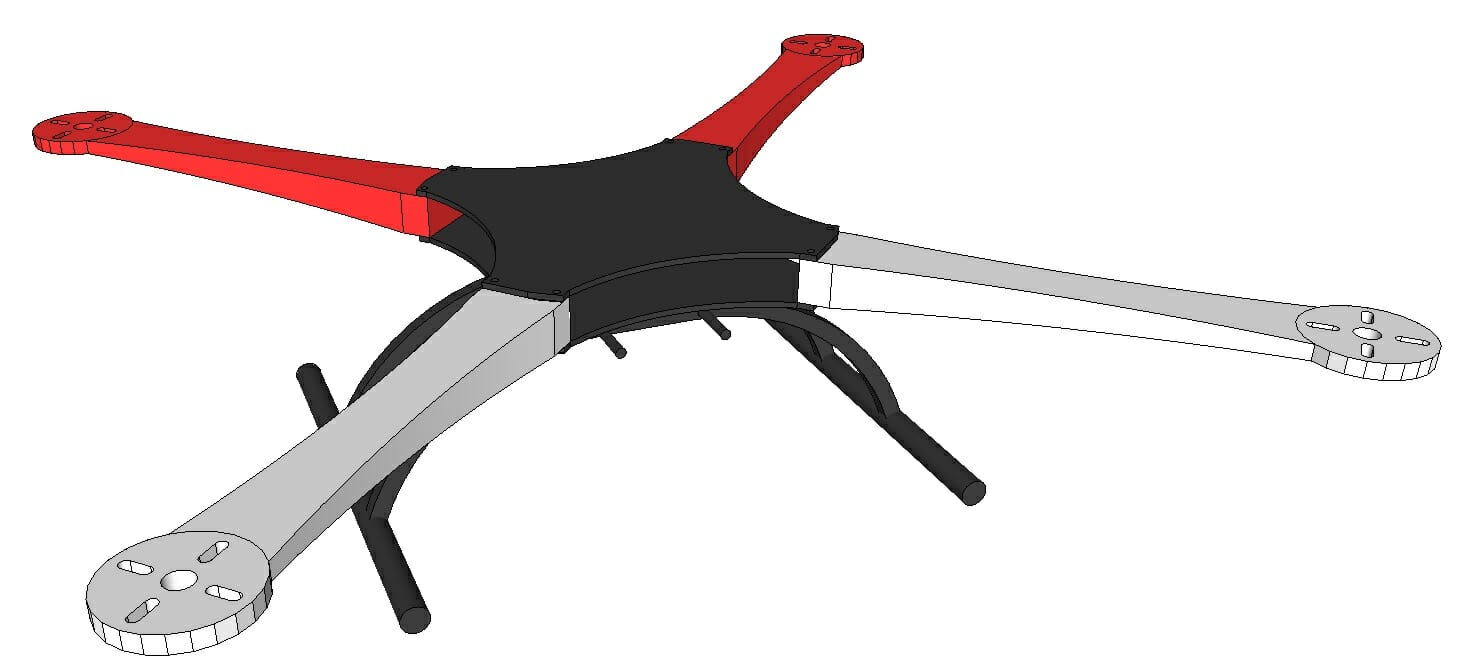
Montering af rammen
Hvis du bygger din egen ramme, kan du samle den på dette tidspunkt. Hvis du har købt et rammesæt, skal du følge monteringsvejledningen. Bemærk, at du muligvis skal adskille bestemte områder for at lette tilslutningen eller fjerne (skjule) elektriske elementer. Målet er at sikre, at intet er løst, alle ledninger er sikkert fastgjort, og intet kan falde ud af rammen eller blive viklet sammen.
Installation
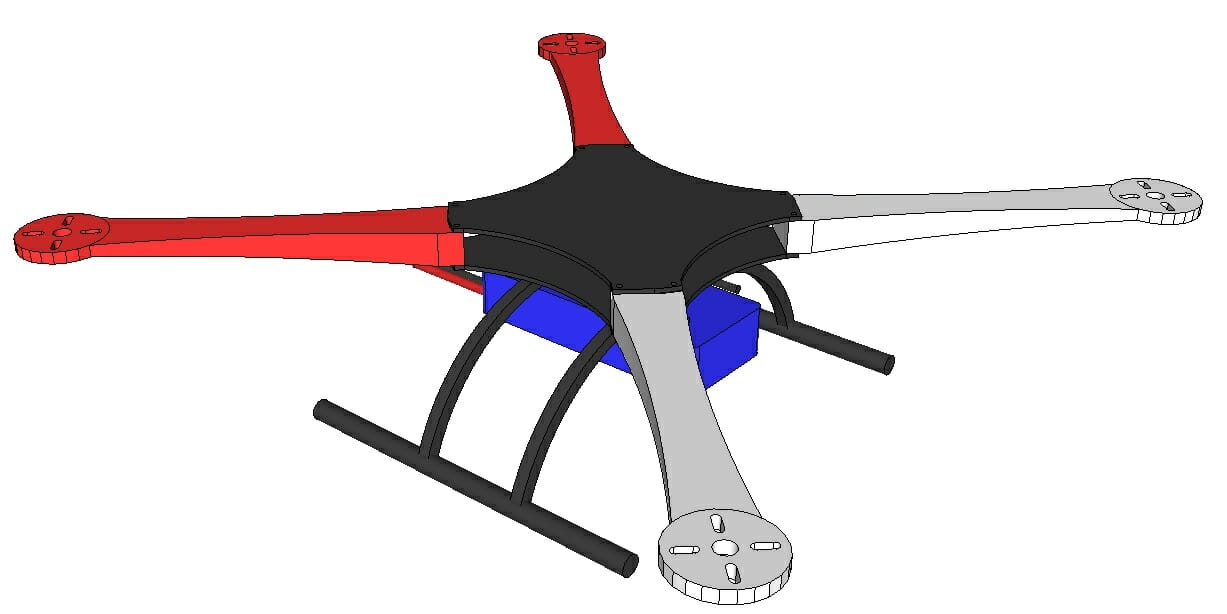
Batteriets placering.
Batteriet, der bruges til strøm, er ofte det tungeste element på en UAV og kan variere fra 1/4 til 1/2 af dets samlede vægt. Derfor er installationsstedet meget vigtigt. Den ideelle placering til hovedbatteriet bør være i midten af flyet, så alle motorer kan klare nogenlunde samme belastning. Hvis batteriet er placeret tættere på bagsiden af flyet, skal de bageste motorer levere mere kraft end de forreste motorer, og derfor vil den maksimale samlede fremdrift være begrænset (når de bageste motorer er ved fuld tryk, vil der ikke være nogen tryk på de forreste motorer). Hvorimod den sædvanlige fremgangsmåde i multi-rotor-design er at holde flyet symmetrisk omkring en midterlinje (eller mindst en akse), så batteriet bør placeres langs denne midterlinje frem for at forskydes til den ene eller den anden side...
Dernæst skal du beslutte i hvilken højde batteriet skal placeres. Der er flere steder, hvor batteriet kan installeres:
- Under rammen (flyet vil være tungt nedenunder, mere stabilt og mindre akrobatisk).
- Direkte under motorerne (normalt inde i rammen); muligvis et af de bedste steder.
- I samme højde som motorerne eller rotorerne (f.eks. Monteret oven på rammen).
- Over propellerne (UAV'en vil være tungere ovenpå og mere tilbøjelig til at vende).
For den bedste ydeevne bør batteriet ideelt placeres i position 3 ovenfor. Position 4 skaber effekten af et omvendt pendul, og hvis UAV vipper ud over en bestemt vinkel, vil dronen have en tendens til at vende. Position 1 vil skabe en temmelig stabil platform, der i sagens natur har en tendens til at forblive på niveau, men er ekstremt uegnet til akrobatik. Derfor vælger de fleste designere position 2 og placerer batteriet enten direkte under rammen eller inde i det. Denne fremgangsmåde frigør plads under rammen til nyttelast som f.eks. Affjedringssystemet og plads over for flyvekontrolleren og anden elektronik for at være så tilgængelig som muligt.
Batterimontering
Der er mange almindelige måder at fastgøre batteriet på rammen, herunder:
- velcrobånd
- Selvklæbende velcro (den ene side er limet til batteriet og den anden til rammen)
- I rammen
Velcrobånd er mest almindelige for medium “ standard ”størrelse brugerdefinerede droner Mens rammekapsling oftest findes på kommercielle droner, er rammerne for sådanne UAV’er opfattet under pres og efterlader plads inde specifikt til et specifikt batteri. Velcro bør ideelt set kun bruges, hvis batteriet er relativt let; i stedet for en kort sektion i midten anbefales det at lime en strimmel langs hele batteriets længde. Hvis du bruger velcrobånd og finder ud af, at batteriet har en tendens til at springe ud på grund af manglende greb, anbefales det, at du tilføjer gummilister, hvor batteriet kommer i kontakt med stropperne. Det anbefales ikke at bruge lim til at fastgøre batteriet til rammen. Hvis du ikke bruger en UAV, skal du fjerne batteriet og opbevare det i en LiPo sikker pose eller keramisk reservoir.
Opladning af batteriet
Det er meget sandsynligt, at du har valgt et litiumpolymer (LiPo) eller et andet litiumbatteri. De fleste LiPo-batterier over 3,7V har et separat ladekabel med et multi-pin stik til opladning, mens strømkablet kan identificeres ved tilstedeværelsen af et to-polet stik med større ledninger, der kan modstå høje afladningsstrømme. Et opladningsstik har normalt en kontakt til hver batteribank samt en fælles jordkontakt.
På grund af farerne forbundet med LiPo -batterier (brint og elektricitet) er det almindelig praksis at fjerne batteriet helt fra dronen, når det ikke er i brug, og placere det i en LiPo Safe -pose. Den samme taske bruges til opladning af batteriet (tilslut batteriet til opladeren, læg batteriet i posen (lad opladeren ligge uden for posen) og luk det (det har normalt en velcrolukning).
.Placering og montering af flyvekontroller
Ideelt set skal flyvekontrollen være placeret i midten af dronen i samme højde som motorerne. Hvis dette ikke er muligt, kan controlleren placeres lidt højere eller lavere. retning til venstre eller højre side, og undgå at montere den fremad eller bagud. Hvis du har købt en ramme til en UAV, har disse ofte monteringshuller til flyvekontrolleren, som er på det optimale sted. controlleren kan fastgøres på en af følgende grundlæggende måder:
- Skruer / møtrikker / stendere (grundlæggende)
- Dobbeltsidet tape (sørg for at den er stærk nok)
- Dobbeltsidet skumtape (for at opnå dæmpningseffekt)
- Gummidæmpningsbøsninger (til høj dæmpning)
Nogle flyvekontrollere har enten eller kan have en valgfri beskyttelsesetui.
På dette tidspunkt skal du have en fuldt samlet og tilsluttet UAV, eksklusive propellerne. Lektion 6 inkluderer opsætning og test af senderen, flyvekontrollersoftware, tjek før flyvning og første flyvning.







