Indhold
- DIY -drone: Lektion 1. Terminologi.
- Gør-det-selv drone: Lektion 2. Rammer.
- Gør-det-selv drone: Lektion 3. Kraftværk.
- Gør-det-selv drone: Lektion 4. Flyvekontroller.
- Gør-det-selv drone: Lektion 5. Montering.
- Gør-det-selv drone: Lektion 6. Ydelseskontrol.
- Gør-det-selv drone: Lektion 7. FPV og afstand.
- Drone med egne hænder: Lektion 8. Fly.
Introduktion
I lektion 5 skulle du afslutte monteringen af dronen (uden at installere propeller). Tag dig god tid, da selv små fejl kan føre til et nedbrud. Du har stadig et par trin inden din første flyvning, så vær tålmodig og følg nedenstående retningslinjer. Som i den foregående lektion vil vi fortsat antage, at du bruger radiostyringsudstyr til at interagere med UAV (som den mest anvendte kontrolmetode på nuværende tidspunkt).
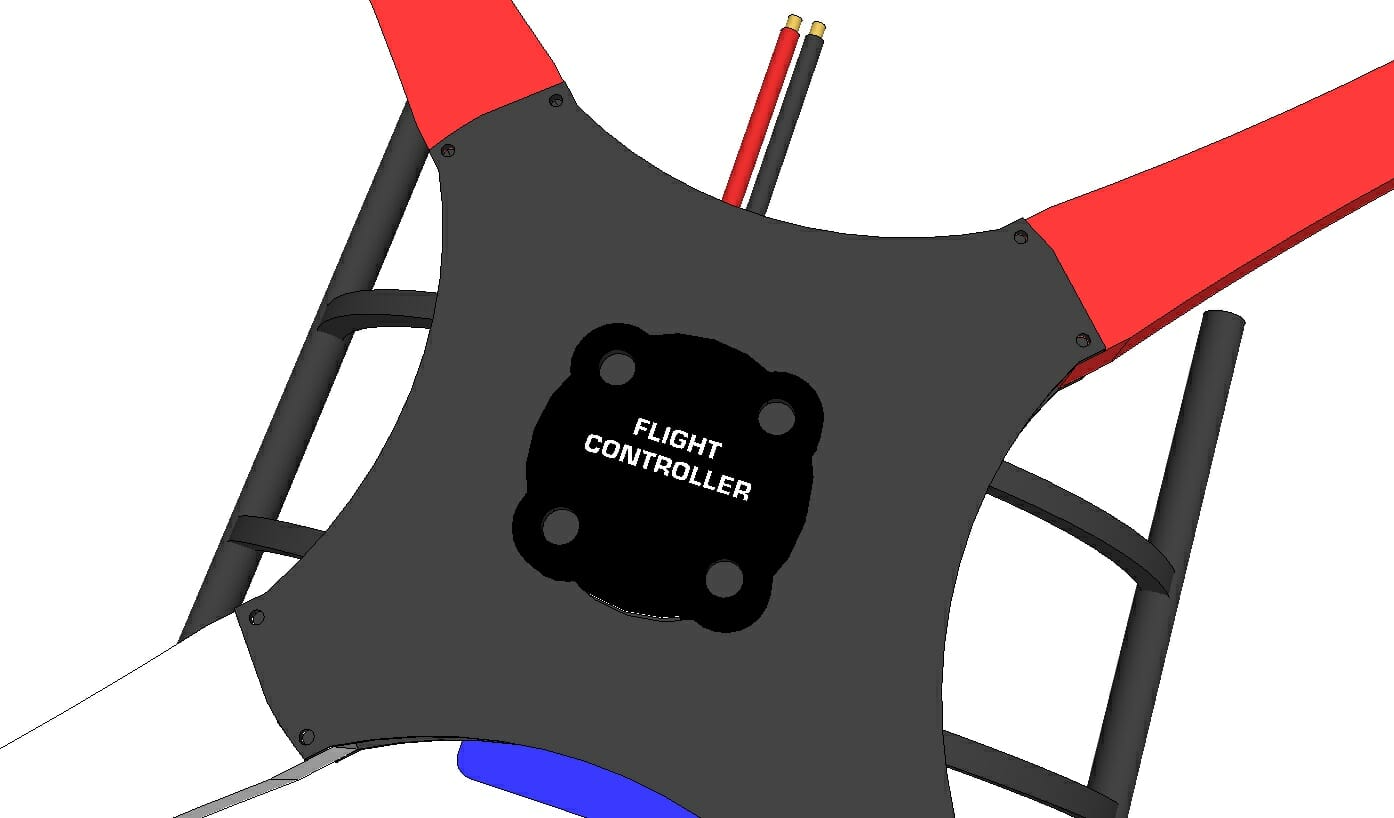
Flight Controller
- Ikke alle flyvekontrollere er ens, så installationsproceduren afhænger virkelig af den model, du vælger. Hvis du ikke allerede har gjort det, skal du tage dig tid til at læse brugervejledningen til den valgte flyvekontroller grundigt fra start til slut. Udeladelse af den mindste detalje kan gøre forskellen mellem en første vellykket flyvning og en fuldstændig afskrivning. En velskrevet brugermanual bør indeholde alt, hvad du finder på denne side og mere, så det anbefales, at du bruger denne vejledning som en tjekliste og ikke som en erstatning / alternativ til de grundlæggende udviklerinstruktioner.
- De fleste flyvekontrollere giver en trin-for-trin procedure til valg af indstillinger for en specifik UAV-konfiguration, herunder fuld kontrol over PID-værdier. Værdierne for hver (P, I og D) kan justeres til din specifikke ramme og flyvende stil; fra noget mere stabilt til brug af platformen til luftfotografering, til noget der mere ligner sportsflyvninger (udførelse af salto, dronevæddeløb osv.). Det starter normalt med standardværdierne for hvert felt, og hvis du ikke har nok erfaring til at ændre dem, anbefales det at lade alt være som det er indtil den første flyvning.
- Manualen til flyvekontrolleren skal også angive, hvordan motorens minimum RPM skal indstilles, det vil sige indstille den hastighed, hvormed motorerne roterer, når de belastes. I første omgang kan du indstille denne værdi relativt lav - lige nok til at se motorerne snurre, men ikke så meget, at UAV'erne bevæges af det tryk, de genererer. Det maksimale tryk, hvis du kan indstille denne værdi, skal svare til den maksimale værdi, som gaspedalen på dit kontroludstyr kan give.
- Et aspekt, der kan diskuteres i flyvekontrollens brugermanual uden at komme med forslag, er flyvetilstanden. Tilbage til Lektion 4 bestemmer "Flight Mode", hvilke sensorer der bruges til at stabilisere dronen, såvel som dens funktion / formål. De mest almindelige sensorer, der findes på en flyvekontroller, er gyroskop, accelerometer, barometer, kompas og muligvis GPS.
- Hvis dette er din første drone, kan det stærkt anbefales at have den mest stabile flytilstand til rådighed for din flyvekontroller, som bruger de fleste tilgængelige sensorer til at stabilisere dronen. Generelt skyldes det, at PID -controllerindstillingerne kan være for langt fra din ramme / indstillinger, hvorfor det er bedst at vælge standardværdierne for PID -controllere. Hvis du har fløjet før, kan ACRO -tilstand (som kun bruger gyroskopet) være den bedste.
- De fleste flyvekontrollere giver dig også mulighed for at ændre "flytilstand" under flyvning via en backup -kanal. For eksempel, hvis din fjernbetjening har seks kanaler, kan du overveje at tildele kanal 5 eller 6 (som ofte er forbundet med switches), så du kan ændre flyvetilstand, mens du flyver med dronen. Inden du flyver, skal du sørge for at vide, hvilken kontaktposition der svarer til hvilken flytilstand.
- Det frarådes kraftigt at bruge GPS -hotspot -flyvning eller mere sofistikerede funktioner / sensorer (f.eks. En ultralydsafstandssensor til at bestemme afstanden til jorden), indtil du er sikker på, at UAV'en er godt afstemt. Nogle manualer foreslår, at du kun bruger ACRO (akrobatisk) -tilstand, men hvis du ikke har en betydelig flyveerfaring, vil det ikke være fysisk muligt at flyve i denne tilstand, tilstanden er den sværeste at styre, da stabilisering er udelukket.
Konfiguration af kontroludstyr
- Nogle konsoller har forskellige driftsmåder, såsom fly, helikopter, bil osv. I 4 (Afsnit: Kontrol) diskuterede vi de fire hovedkontrolkanaler: Throttle, Yaw, Pitch and Roll, som normalt er værdier forbundet med fly eller helikoptere. Hvis flyvekontrollerens manual ikke angiver en bestemt tilstand for senderen, anbefales det at bruge flytilstand.
- Der er to typer fjernbetjening: Mode 1 (Mode 1) og Mode 2 (Mode 2). Mode 2 (mest almindelig) med denne type kontrol er Throttle and Yaw forbundet med venstre kanal / stick / joystick, Pitch and Roll med højre. Du kan også dobbelttjekke deres tildeling ved at flytte pindene direkte for at sikre, at værdierne ikke vendes.
- Sendertilstande tilføjer ofte kanal / signal "offset" niveauer for at gøre bevægelse mere egnet til et bestemt system, men de fleste flyvekontrollører bekymrer sig om enhver forskydning og som sådan foretrækker "rå" værdier. Hvis din sender ikke har nogen tilstande, skal du bare kontrollere hvilken kanal / stick / joystick der er ansvarlig for hvilken.
- En RC -sender til generelle formål kan kun levere et begrænset signalområde på hver kanal, og derfor anbefaler vi i denne lektion dig at finde ud af, hvilket værdiområde en RC -sender kan levere, og om minimums- og maksimumværdier kan justeres (eller som værdier eller som en procentdel af standardintervallet). For eksempel kræver MultiWii -baserede flyvekontrollere sendere, der kan levere et fuldt spektrum af pulser fra 500ms til 2500ms, mens standardindstillingen kun kan være 1000ms til 2000ms, da dette er en almindelig konfiguration for R / C -fly. Læs din sendermanual for at indstille signalendepunkter / -interval (hvis relevant).
- Hvis din controller har et LCD -display, kan du ofte gøre dette via grænsefladen under "Indstillinger".
- “Test af kontroludstyr ved max. Distance ”er lettest at implementere ved hjælp af en ven / hjælper, eller tilslut en summer eller anden visuel / hørbar feedback til RC -dronen. Nogle højere modeller har en rækkevidde test funktion. Målet med testen er at se, hvor langt signalet bevæger sig, før modtageren ikke længere kan opfange det. Det anbefales kun at bruge rækkevidde-testen efter den såkaldte "Fight flight" (Fight flight-dronen testes for ydeevne på en kort afstand inden for pilot-dronens synsfelt). Range Test Procedure:
- Tænd for kontroludstyret, derefter flyet.
- Træd 15 meter tilbage, og aktiver kontakten, der er forbundet med summeren; Du skal høre ham.
- Hvis du ikke har en summer, skal du tænde for flyet og kontrollere, at motorerne kører.
- Slå lyd fra summeren / genopret dronen
- Gentag disse trin længere og længere (sigtelinje), indtil dronen reagerer på dit input.
- Dette er den absolutte maksimale afstand, du kan flyve med din drone.
- Du tror måske, at du ikke planlægger at flyve det så langt, men husk, at dronen bevæger sig i tre akser, og noget kan gå galt.
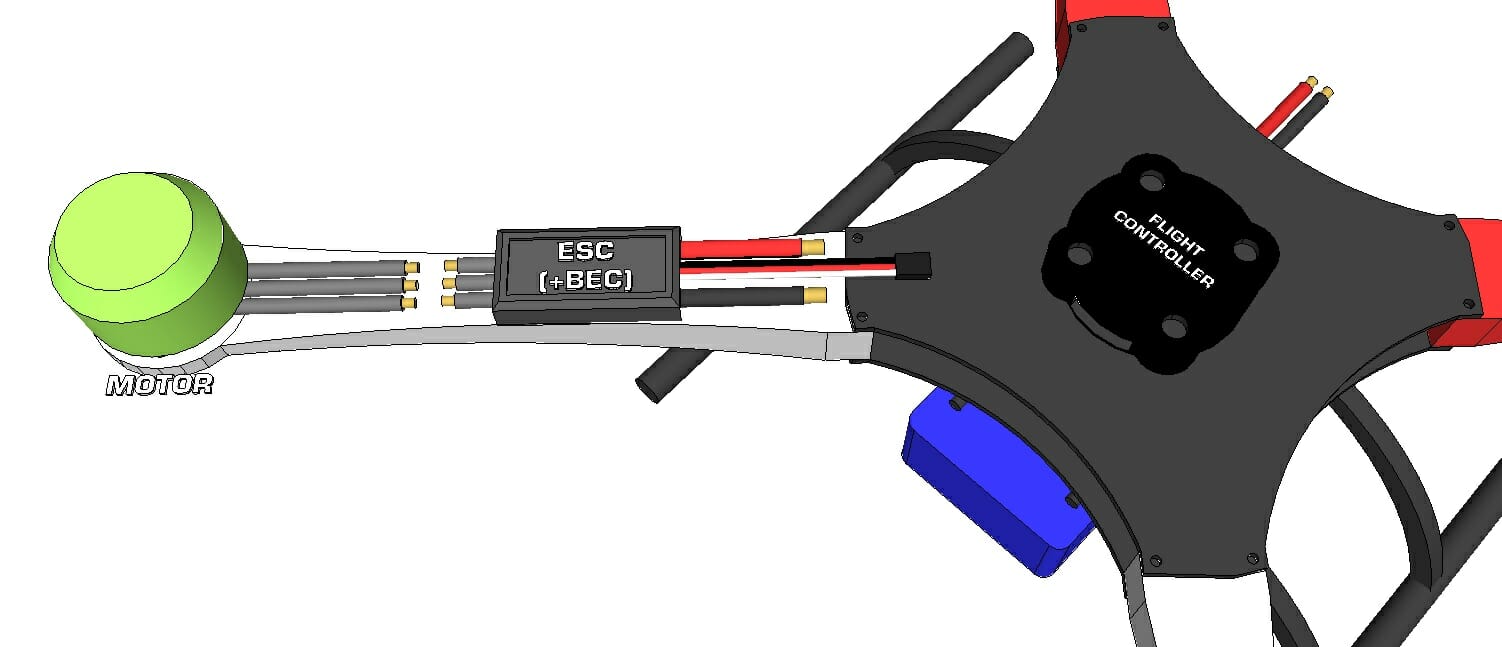
ESC Kalibrering
ESC fungerer ud af boksen, men signalerne (PWM / PWM), der er forbundet med minimum og maksimal gas, stemmer muligvis ikke overens med det, der giver din sender. Derfor skal du "træne" hver ESC med de nødvendige værdier. Sørg for, at propeller ikke er monteret på motorer. Se brugervejledningen til din flyvekontroller. Efter omprogrammering bevarer ESC sin nuværende konfiguration, selvom den ikke er strømforsynet. Derfor er hver ESC kun programmeret én gang under den første test / opsætning.
Normalt er der et afsnit i flyvekontrollemanualen, der forklarer, hvordan man kalibrerer ESC og forklarer, hvordan man gør det. Hvis ikke, kan du prøve en af de metoder, der foreslås nedenfor. Endnu engang, hvis du ikke har fjernet dine propeller endnu, er det tid til at gøre det.
Senderen
- Tilslut en ESC til “Throttle” -stiften på din modtager. Hvis din ESC ikke har en BEC tilsluttet, kan du tilslutte en BEC-aktiveret ESC til en anden pin på modtageren (f.eks. Batteriindgangen) blot for at levere strøm til modtageren.
- Tilslut ESC til den relevante motor (hvis den ikke allerede er tilsluttet).
- Indstil pinden / joysticket, der er knyttet til “Throttle” til maksimum (normalt venstre pind / joystick og fuld frem / op), og tænd derefter for senderen.
- Tilslut LiPo -batteriet til strømfordelingskortet eller direkte til dette ESC (hvis stikene er kompatible).
- Motoren skal bippe tre gange (11.1V LiPo) efterfulgt af en kort pause efterfulgt af to korte bip (hvilket er det maksimale bip).
- Flyt gashåndtaget / joysticket straks efter korte bip til den laveste position (hvilket er det mindste bip).
- Motoren skal bippe tre gange (11.1V LiPo) efterfulgt af et langt bip.
- Gasspjældsområdet for denne ESC er nu indstillet, gå videre til den næste, indtil alle ESC'er er blevet kalibreret.
Andre metoder
Følg instruktionerne i produktets brugervejledning for at matche minimum / maksimumområdet for ESC -indgangssignalet til det, det vil modtage fra senderen.
- USB: Nogle ESC -modeller kan programmeres via USB, enten uafhængigt eller med en adapter.
- Programmeringskort: Eksternt ESC-programmeringskort, kan bruges med næsten ethvert ESC og er en enkeltstående enhed.
- Mikrocontroller: Denne metode er ikke udbredt, men det er bestemt muligt at omprogrammere ESC med en mikrokontroller, hvis du har den korrekte kode og kan oprette forbindelse korrekt.
- Flight Controller: Nogle flight controllere giver dig mulighed for at kalibrere eller programmere ESC'er via deres programmeringsinterface. Læs vejledningen til din flyvekontroller for at se, om dette er muligt.
Motor og hovedrotor (propel). Retning.
Du er nu klar til at installere propellerne. Lad os gå tilbage til 3 lektion, som diskuterer hovedrotorens retning for at skabe tryk. Alle propeller har en top og bund og en CW (med uret) og CCW (mod uret) rotationsretning. Der er normalt tekst øverst på en rekvisit, der angiver dens højde og diameter. Når propellen er monteret på motorakslen, peger denne øvre del mod himlen, uanset om motoren er monteret på toppen af dronestrålen eller i bunden af dronen.

Checkliste for pilotflyvning
Selvom dronen ikke er så kompleks eller farlig som et rigtigt erhvervsfly, er du - som pilot og skal have en tjekliste før flyvning for at sikre, at den kommende flyvning ikke vil bringe mennesker eller ejendom i fare. Listen nedenfor dækker kun det væsentlige og skal udføres før hver flyvning (ikke kun før den første).
- Sørg for, at du har nogen af de visuelle hjælpemidler til rådighed til at fortælle, hvilken side af din drone der er foran. Tilføj som minimum farvet tape til de to forreste bjælker.
- Sørg for, at kontroludstyrets batteri er opladet.
- Ryst UAV let - intet må løsne, rasle eller falde til jorden. Du vil aldrig vide, hvad der kan være blevet fortrængt eller brudt som følge af en hård landing på en tidligere flyvning.
- Sørg for, at propellerne stadig er forsvarligt fastgjort.
- Tænd først for kontroludstyret, og tænd derefter for dronen (hold hænderne væk fra rotorerne).
- Sørg for, at du pålideligt kan bevæbne og genstarte motorerne (de skal dreje ved lavt omdrejningstal ved "Arm" og stoppe med at dreje, når "Frakobl")
- Sørg for at kalibrere, eller sensorerne er gode kalibreret (du skal gøre dette regelmæssigt)
- Kontroller senderens rækkevidde.
- Sørg for, at flyveområdet er helt klart, og hvis nogen er inden for det, så lad dem vide det, især nysgerrige børn; at du flyver UAV, og at du ikke skal nærme dig, før dronen er landet med motorerne helt stoppet.

Testning
Indtil du får tilstrækkelig tillid til dine evner som pilot og dronedesigner, er følgende procedure: foreslået for alle ubemandede luftfartøjer inden deres første flyvning.
- Tænd motorerne, og sørg for, at de roterer i de korrekte retninger som beskrevet i flyvekontrolhåndbogen.
- Løft gashåndtaget / joysticket meget langsomt, og sørg for, at propellerne skubber luften ned mod jorden. Brug af silkepapir er en sikker mulighed for visuel inspektion.
- Flyt Pitch stick / joystick meget forsigtigt fremad / bagud for at sikre, at dronen vipper fremad / bagud korrekt.
- Flyt rullepinden / joysticket meget forsigtigt til hver side for at sikre, at dronen reagerer korrekt.
Hvis dronen ikke opfører sig ordentligt, er der mange mulige årsager, blandt hvilke de mest almindelige er:
- En eller flere motorer roterer i den forkerte retning.
- Flyvekontrolleren blev ikke installeret korrekt, og hvad den betragter som "fremad" er forskellig fra din fysiske UAV.
- En eller flere kontakter mellem modtageren og flyvekontrollen er ikke forbundet korrekt eller endda på det forkerte sted.
- Måske er alt indstillet korrekt, bare for hurtigt eller for pludseligt til at reagere på brugerinput.
Beredskabsplan
er lige begyndt at arbejde i marken og / eller med en ny drone. Listen nedenfor er beregnet til at give dig ting at tænke over og nogle ideer til, hvordan og hvorfor, at reagere på håbefulde piloter. Beslutningen træffes fra sag til sag, og i nogle situationer kan den modsige det, der foreslås her. Så lær dig selv at kende, lær dine omgivelser at kende, og vær forsigtig! I næsten alle tilfælde vil det være bedre at miste dronen end at risikere at støde sammen med mennesker eller ejendom.
Dronen er meget langt væk, og du ved ikke, hvilken retning det er.
- Reducer gashåndtaget, og observer, om dronen reagerer (kontrollerer, om der er kommunikation).
- Hvis dronen reagerer på gas, kan du prøve at lande lige der (hvis du kan).
- Hvis denne placering ikke er egnet til landing, skal du forsigtigt prøve at styre dronen fremad (ikke noget drastisk), og hvis dronen reagerer ved at stole på din position, vil bevægelse til venstre eller højre på himlen give dig mulighed for at bestemme dens orientering. Hvis det ikke ser ud til at bevæge sig til venstre eller højre, kan det bevæge sig mod dig eller væk fra dig, så fortryd, hvad du lige har gjort, og prøv at skure til venstre.
Dronen vender pludselig kraftigt ud af kurs (med eller uden grund).] af dronen eller, endnu værre, vil dronen begynde at klatre for at falde fra en større afstand.
Dronen bevæger sig hurtigt mod mennesker.
- Gas til maksimum, så den vinder højde og flyver over dem; din drone vil sandsynligvis stadig være i den korrekte generelle retning, så det er bedre at miste dronen end at flyve ind i mennesker.
- Efter at have nået den optimale højde, skal du prøve at genvinde kontrollen og derefter placere den, så den er over det klare landingsområde.
Dronen bevæger sig hurtigt mod dig.
- Gas til nul; lad det ramme jorden, end det vil flyve ind i dit hoved.
Dronen reagerer ikke på input fra kontroludstyret.
- I så fald er der intet du kan gøre. Hvis din drone stadig er i luften, kan fjernbetjeningens batterier være opbrugte.
Dronen mister propellen.
- Tab af en propel påvirker både tryk og gab; Prøv først at rette gafflen (du skal sandsynligvis holde pinden / joysticket forbundet til kæben i yderpositionen), og flyt derefter forsigtigt gashåndtaget / gashåndtaget op for at forhindre et sammenstød, derefter gashåndtaget nedad.
Første flyvning
Uanset din tidligere flyveoplevelse bør din første flyvning, især med en brugerdefineret multi-motor UAV, være så diskret som muligt. Formålet med den første flyvning er at sikre, at alt er konfigureret korrekt; samt at identificere eventuelle alvorlige problemer.
- Placering: åbent område, væk fra bygninger, mennesker og ejendom. For eksempel: en tom fodboldbane, baseballbane og så videre ville være ideel. Der burde slet ikke være vind.
- Gå gennem pilotens tjekliste med forhåndsflyvning.
- Stå cirka 2 meter væk fra dronen med fronten af dronen vendt væk fra dig.
- Tilkobl motorerne.
- Flyt forsigtigt gashåndtaget / joysticket op. Nå det punkt, hvor dronen er klar til at tage afsted. Der kan være nogle jordeffekter, der får dronen til at hoppe lidt, men bare rolig.
- Tilføj gashåndtag for at få dronen fra jorden og væn dig til betjeningerne - prøv at holde den inden for en bestemt radius og se, hvordan den reagerer på dine stick / joystick -bevægelser.
- Lav små, gradvise og flydende bevægelser - intet for pludseligt. Sænk gashåndtaget for at forhindre en ulykke.
- Hvis din drone ikke opfører sig som forventet (f.eks. Ved at flytte "Pitch" -aksen fører til dens tonehøjde, samt ruller til venstre eller højre), er der noget galt, og du bliver nødt til at finde ud af årsager til de identificerede problemer...
- Hvis dronen opfører sig som forventet, er din opgave konstant at holde sin position i en højde på 1,2-2 meter fra jorden. Bliv ikke for sur så hurtigt.


.Yderligere flyvninger
Nu hvor du har udarbejdet fejl og flyver komfortabelt i et kontrolleret miljø, kan du fortsætte med den anden flyvning.
- Da dronen stadig ikke er fuldt testet, foreslår vi at gennemgå hele proceduren før flyvning for den første flyvning, hvilket ikke bør tage lang tid.
- Brug glatte bevægelser til at vænne dig til, hvordan dronen reagerer på dine stick / stick -bevægelser ved at holde den på en sikker afstand.
- Tilpasning til pilotering af en drone bør ske uden hjælp fra FPV og forskellige sensorer.







