Definition
Hastighedsregulatorer kaldes Electric Speed Controller eller ESC for kort i det engelsktalende samfund. ESC's hovedopgave er at overføre energi fra batteriet til den børsteløse motor. Behovet for deres brug opstod på grund af nogle funktioner i BC - motoren. Kort sagt leverer batteriet jævnstrøm, mens den børsteløse motor accepterer trefaset vekselstrøm.

Driftsprincip
Kommunikation med andre komponenter i multikopteren.
ESC -indgangen forsynes med spænding fra batteriet og signaler fra flyvekontrolleren, og regulatoren udsender styrespændingen til drevet. Følgelig skal regulatoren tilvejebringe:
- Kompatibilitet med flyvelederen.
- Maksimal motorstrøm (beregnet ud fra motor- og propelspecifikationer) plus 20 - 30%.
- Det nuværende forbrug er mindre end den strøm, der leveres af batteriet divideret med antallet af ESC'er.
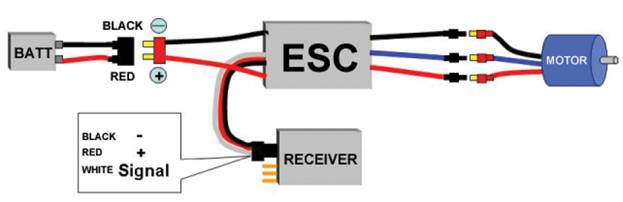
* Det enkleste forbindelsesdiagram.
Hvilken slags regulatorer er der?
BEC og UBEC
Ud over hovedfunktionen kan ESC'er også overføre strøm til andre dele af dronen: flyvekontroller, servoer osv. Dette opnås ved at indføre et batterielimineringskredsløb (i det følgende benævnt BEC) i regulatoren.
Brugen af BEC forenkler i høj grad designet af dronen, men en sådan ordning har en række ulemper. Batteriets ekskluderingsenhed kan overophedes under højspændingsudsving og store belastninger. Derudover har ESC'er med BEC en tendens til at være dyrere end ESC'er uden blokering.
Enig, det ville være mere logisk og billigere at lave en separat ESC og en BEC separat. Der er en sådan løsning, og den kaldes Universal Battery Eliminator Circuit (i det følgende benævnt UBEC).
UBEC -fordele

UBEC - tilsluttes direkte til batteriet og driver den ønskede dronesamling. Fordelene ved denne fremgangsmåde er meget væsentlige:
- Hastighedsregulatorer vil overophedes mindre, da BEC vil blive udelukket fra dem
- UBEC'er har en høj effektivitet
- Derfor er UBEC fra de to foregående punkter i stand til at levere mere strøm med mindre risiko
- Ingen overbetaling for et par ekstra BEC'er placeret i en ØSU. For nogle flyvekontrollere frarådes det stærkt at tilslutte mere end én ESC BEC
- Betjeningens lettere vægt
Typer af BEC’er og deres fordele
BEC’er er af to typer: lineær (LBEC) og puls (SBEC).

- Lineær omdanner energi til varme og slukker ved overophedning. Dette kan føre til ubehagelige resultater: i bedste fald vil copteren ikke være i stand til at starte, og i værste fald et ukontrolleret fald. I denne forbindelse begyndte det at blive brugt i en samling med servodrev, som til gengæld ikke forbruger meget strøm, hvilket forhindrer enheden i at blive overophedet.
- Pulsregulatoren regulerer spændingen ved hurtigt at tænde og slukke for strømmen, denne fremgangsmåde eliminerede overophedning, øgede udgangseffekten og fik lov at nå 90% effektivitet, samt at puls BEC'er overgår lineære i vægt. Interferens, der opstår i kredsløbet, og som påvirker driften af radioudstyr negativt, elimineres ved tilføjelse af et LC -filter.

I betragtning af at mange producenter installerer filtre på deres UBECLC (og hvis der stadig ikke er noget filter, så kan det købes billigt og let for at installere), bruger fagfolk SBEC -regulatorer i deres droner.
Software ESC
Da hastighedsregulatoren udfører nogle konverteringer med en høj frekvens og kan konfigureres til forskellige driftsmåder, skrives der en separat software kaldet firmware til den. Dette giver dig mulighed for at rette tidligere fejl i kontrolalgoritmer, oprette mere avanceret firmware (og derved f.eks. Reducere batteriforbruget på gennemsnitlig gas) og foretage fleksible indstillinger. I droner fra kendte virksomheder som DJI ændres controllersoftwaren automatisk ved hjælp af flyvekontrolleren.
Bemærk! Overskrivning af softwaren til hastighedsregulatorer kan resultere i forskellige nedbrud af dronen samt annullering af garantiservice! Husk, at du gør dette på egen risiko!
Hvordan ændrer jeg softwaren?
Der er flere måder at ændre controllersoftwaren på:
- Brug af det dedikerede kontrolkort
- Brug af flyvekontrolleren
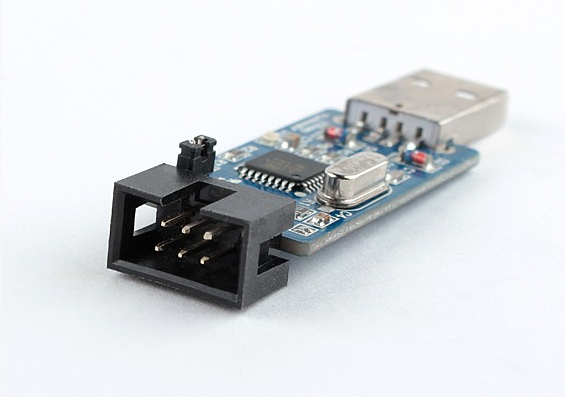
- Brug af ASP -programmereren
Den tredje mulighed er enklere og implementeres i øjeblikket aktivt i nye modeller.
Valg af guvernør
Baseret på alt det ovenstående er der særlige kriterier for valg af guvernør til drone:
- Kompatibel med flyvekontroller. Flyvekontrolleren skal understøtte BEC- og ESC -firmware.
- Kompatibel med motor- og batterispecifikationer.
- Tilstedeværelse eller fravær af BEС og dens type (LBEC eller SBEC).
- Varmespredning og tæthed.







