Inhalt
- DIY-Drohne: Lektion 1. Terminologie.
- Do-it-yourself-Drohne: Lektion 2. Frames.
- Do-it-yourself-Drohne: Lektion 3. Kraftwerk.
- Do-it-yourself-Drohne: Lektion 4. Flugsteuerung.
- Do-it-yourself-Drohne: Lektion 5. Montage.
- Do-it-yourself-Drohne: Lektion 6. Leistungsüberprüfung.
- Do-it-yourself-Drohne: Lektion 7. FPV und Entfernung.
- Drohne mit eigenen Händen: Lektion 8. Flugzeuge.
Einführung
Nachdem Sie nun alle Hauptkomponenten für Ihr UAV ausgewählt haben, können Sie mit der Montage beginnen. Diese Anleitung behandelt häufige Fehler beim Zusammenbau eines UAV mit mehreren Rotoren sowie einige hilfreiche Tipps zum Tuning. Diese Lektion behandelt keine Gegenstände wie eine Kamera / FPV-System, Langstreckengeräte oder anderes Zubehör (wir werden in 7 Lektionen behandeln).
Komponenten, die Sie zu diesem Zeitpunkt benötigen:
- Rahmen (gekauft oder handgefertigt)
- Motoren, Regler, Propeller, Akku, Ladegerät
- Stromverteilungsplatine / Kabelbaum
- Flugsteuerung und Kommunikationsgerät (Funksteuerung vorgeschlagen)

Antrieb
Um die Ziele dieser Lektion zu erreichen, umfasst das Antriebssystem Ihres UAV die folgenden Komponenten:
- Motoren
- ESC
- Stromverteilung (Board oder Kabelbaum)
- Batterie
- Flugregler
Beachten Sie, dass Propeller nicht aufgeführt sind. Installieren Sie zu diesem Zeitpunkt keine Propeller! Die Hauptschrauben werden erst in der 6. Lektion angeschlossen. Da dies Ihre erste Drohne ist, empfehlen wir Ihnen, eine „rahmenlose“ elektrische Verbindung herzustellen, bevor Sie alles am Rahmen installieren; um alle Anschlüsse zu überprüfen und die festgestellten Fehler zu beheben.
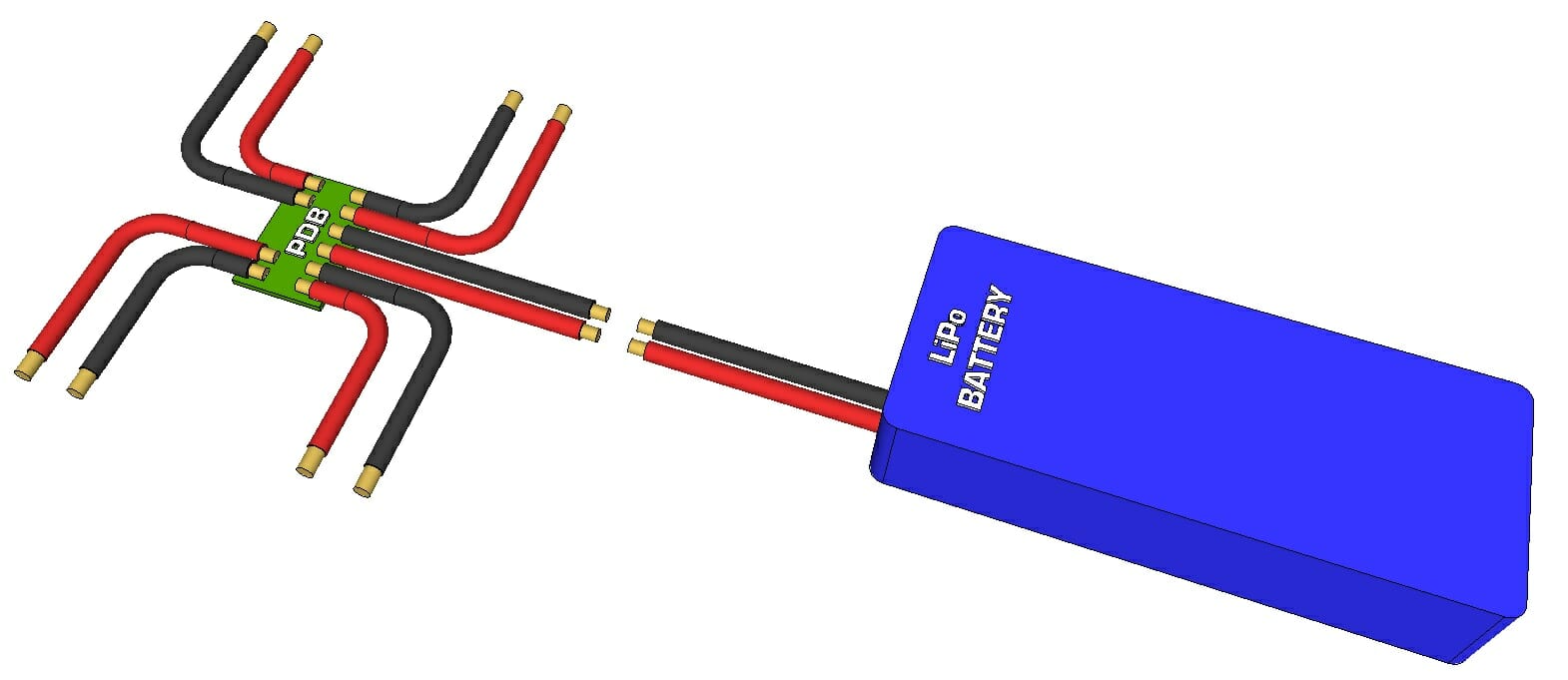
Akku. Stromverteilung
Die Verbindung zwischen Batterie und Stromverteilungssystem sollte relativ einfach sein, wenn beide den gleichen Steckertyp haben. Wenn ja, fahren Sie mit dem nächsten Schritt fort. Wenn die Stecker unterschiedlich sind, schneiden Sie auf keinen Fall die Batteriekabel ab, um den Stecker zu trennen; dies kann zu einem Kurzschluss und einem unangenehmen Stromschlag führen! Stattdessen können Sie einen Adapter nehmen und ihn zwischen dem Anschluss am Akku und dem Anschluss an der Stromverteilungsplatine verwenden. Eine andere Möglichkeit besteht darin, nach einem passenden Stecker zum Batteriestecker zu suchen und ihn zu kaufen; Schneiden Sie dann den vorhandenen Stecker vom Stromverteiler ab und löten Sie den gekauften Ersatz an. Stellen Sie zunächst sicher, dass keine Verbindung zwischen Plus- und Minuspol besteht.
Es ist wichtig zu beachten, dass die meisten UAVs mit mehreren Rotoren keinen Ein-/Ausschalter haben, daher wird die Stromversorgung durch Anschließen und Trennen der Hauptbatterie an den Stromverteilungsanschluss zugeführt und getrennt, sodass ihre Anschlüsse sicher befestigt und die Drähte / Lötstellen sind mit Schrumpfschlauch und / oder Isolierband gut isoliert.
Trennen Sie die Batterie vom Stromverteiler, bevor Sie fortfahren.
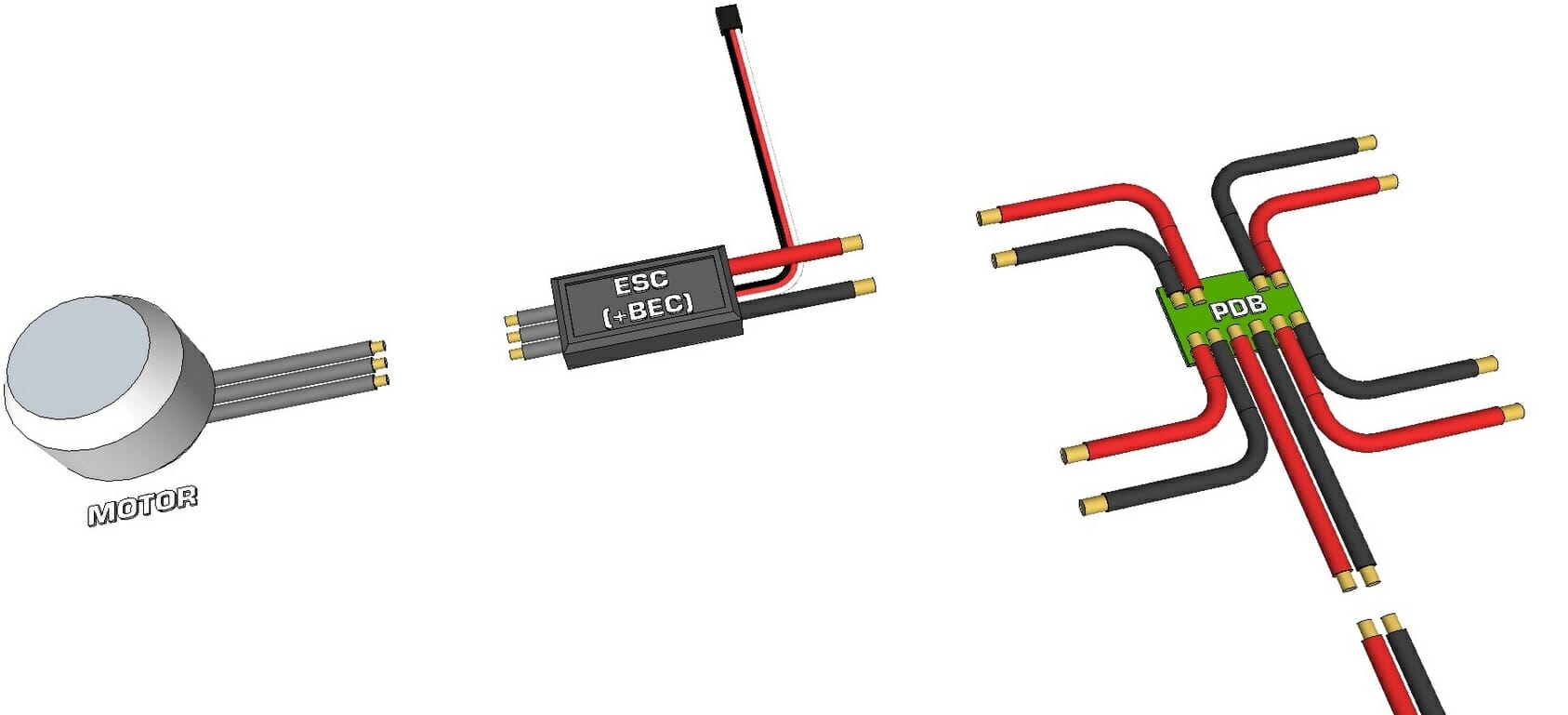
Motor. ESC. Stromverteilung
Das Power Distribution Board (PDP) oder die kabelgebundene Verteilung dient in erster Linie dazu, den Strom von der Hauptbatterie zu jedem ESC zu verteilen. Die Spannung wird dem ESC unverändert zugeführt, sodass die Spannung nicht erhöht (erhöht) oder verringert (verringert) werden muss. Wenn Ihre Drohne vier Motoren hat, sollten Sie vier ESCs haben, und daher sollte Ihre Verteilerplatine / Kabelverteilung die Hauptbatterie schließlich in vier Anschlüsse aufteilen. Wenn Ihr PRP sechs Verbindungen hat und Sie einen Quadrocopter bauen, müssen Sie die letzten beiden einfach nicht anschließen. Wenn Sie einen Hexacopter bauen, sollte Ihr PDP den Strom von der Hauptbatterie auf sechs Anschlüsse verteilen. Der Regler enthält folgende Drähte:
- Ein 3-adriges 0,1-Zoll-Band mit R/C-Anschluss, von dem der schwarze Pin normalerweise geerdet ist, der rote liefert 5V-Ausgang (über BEC (53.)) * ) und gelb / weiß ist der Signaleingang.
- Drei separate Drähte werden an die drei Drähte eines bürstenlosen Gleichstrommotors angeschlossen (normalerweise mit Rundsteckern geliefert, die entweder bereits verlötet oder im Lieferumfang enthalten sind).
- Zwei Eingangsanschlüsse zum Anschließen des Akkus an die PDB (einige mit angelöteten Anschlüssen mit Lötung, einige sind enthalten und manchmal gar nicht).
*ESCs haben normalerweise einen eingebauten Battery Eliminate Circuit (oder BEC), der die Hauptbatteriespannung in 5V umwandelt, um den Empfänger und die Flugsteuerung mit Strom zu versorgen. 5V werden normalerweise über den RC-Anschluss vom ESC geliefert (normalerweise der mittlere / rote Pin). Sie benötigen nur ein BEC, um den Flugregler mit Strom zu versorgen.
Wenn die Stromverteilungsplatine Anschlüsse verwendet, die nicht mit den Anschlüssen am Regler oder Akku übereinstimmen, müssen Sie entweder Adapter kaufen oder neue Anschlüsse kaufen und diese ersetzen ESC oder PRP. Der Vorteil bleibt beim Stromverteiler, dessen Anschlüsse mit denen von Akku und Regler übereinstimmen. Am häufigsten kann eine Lithium-Polymer-Batterie eines UAV DEANS-AnschlussXT60EC3
Wenn Sie zusätzliche Schwachstromelektronik (LED-Beleuchtung, Pendelleuchte usw.) mit Strom versorgen möchten, aber keine freien Anschlüsse an Ihrem Stromverteiler vorhanden sind, können Sie das Batterieladekabel verwenden. Der weiße Ladeanschluss hat normalerweise einen Pin für Masse und einen Pin für jede Zelle (1S, 2S, 3S usw.), die in der LiPo-Akkubaugruppe verwendet wird. Obwohl dieser Anschluss eigentlich nur zum Laden des Akkus dient, kann er an jedem Pin eine Ausgangsspannung von 3,7 V bereitstellen und kann verwendet werden, um stromsparende Elektronik wie einen Kabelbaum oder LEDs mit Strom zu versorgen.
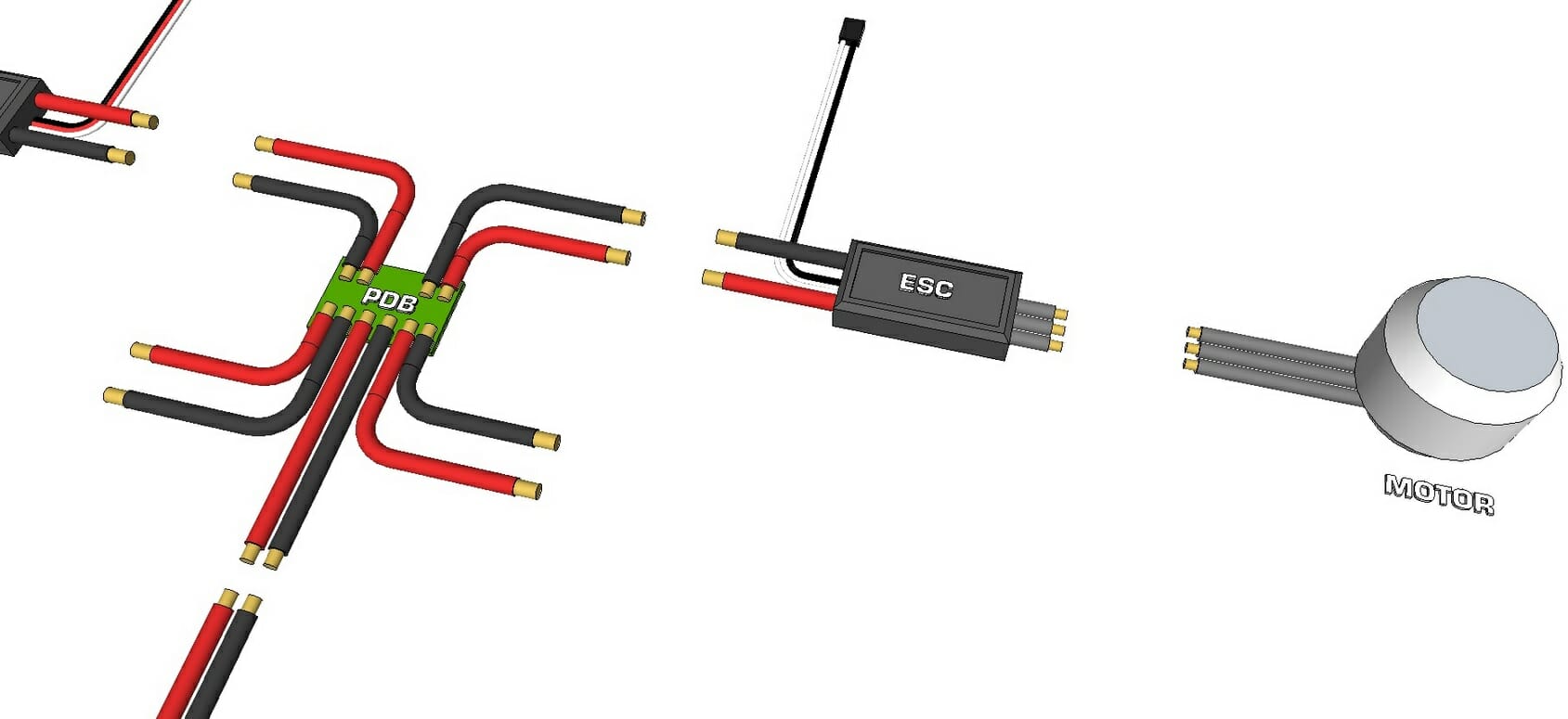
- Entfernen Sie das rote Kabel von jedem 3-poligen R / C-Stecker des Tempomaten außer einem. Es wird empfohlen, dies so zu tun, dass Sie sie bei Bedarf jederzeit wieder einstecken können. Umwickeln Sie die Enden jedes ausgeschlossenen Drahtes mit Isolierband oder verwenden Sie einen Schrumpfschlauch zur Isolierung, damit sie später nicht mit anderer Elektronik in Kontakt kommen können. Das einzige rote Kabel, das unberührt bleibt, wird den in der Baugruppe verwendeten Flugregler mit Strom versorgen.
- Schließen Sie die beiden Versorgungskabel jedes Reglers an die Verteilerplatine an, und achten Sie darauf, dass das rote Kabel an Plus () und das schwarze Kabel an Minus (-) geht.
- Wenn die von Ihnen verwendete Stromverteilungsplatine über eigene R / C-Anschlüsse verfügt, liegt es in diesem Fall an Ihnen, die R / C-Pins jedes ESC mit den R / C-Anschlüssen auf dieser Platine zu verbinden oder direkt an den Flugregler anschließen.
- Verbinden Sie jeden der drei Motorstecker mit den drei ESC-Steckern. Die Reihenfolge beim Anschließen dieser Stecker ist im Moment nicht wichtig (wenn es die Drehrichtung beeinflusst, wird dies später bei Bedarf korrigiert).
Bitte beachten Sie, dass Sie, wenn Sie sich zu diesem Zeitpunkt entscheiden, die Verkabelung zu entfernen oder auszublenden, später möglicherweise auf einige der Anschlüsse gemäß dem in Lektion 6 beschriebenen Verfahren zugreifen müssen, insbesondere die Verbindungen zwischen dem ESC und einem Motor, damit der Motor in die entgegengesetzte Richtung dreht.

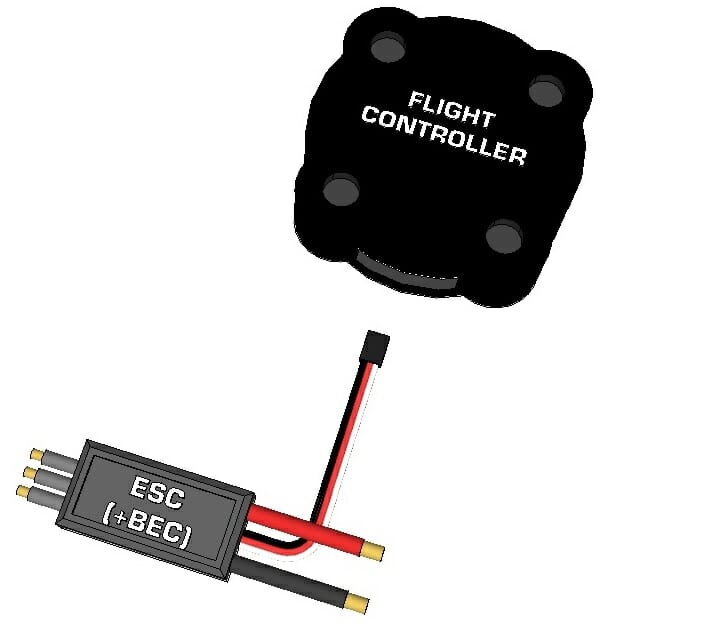
ESC. Flugkontrolleur.
Sie können nun die R/C-Eingänge der Geschwindigkeitsregler mit dem Flugregler verbinden. Der von Ihnen gewählte Flugregler sollte ein Diagramm haben, das zeigt, welche Controller-Pins mit den Motoren Ihrer Multi-Rotor-Baugruppe verbunden sind. Dieses Diagramm sollte auch die Drehrichtung jedes Motors zeigen, aber auch hier müssen Sie die Richtung vorerst nicht berücksichtigen.
- Siehe Anschlussplan zwischen den Motoren / ESC und dem Flugregler in der PC-Bedienungsanleitung.
- Verbinden Sie die R / C-Anschlüsse jedes ESC mit den entsprechenden Pins am Flugregler, stellen Sie sicher, dass das Massekabel (normalerweise schwarz) mit dem Massestift des Flugreglers und dem Signalstift (weiß oder gelb) verbunden ist) verbindet sich mit dem Signal-Pin des Flugreglers...
- Nur einer der RC-Anschlüsse hat noch den roten (Strom) Pin.
Kommunikation
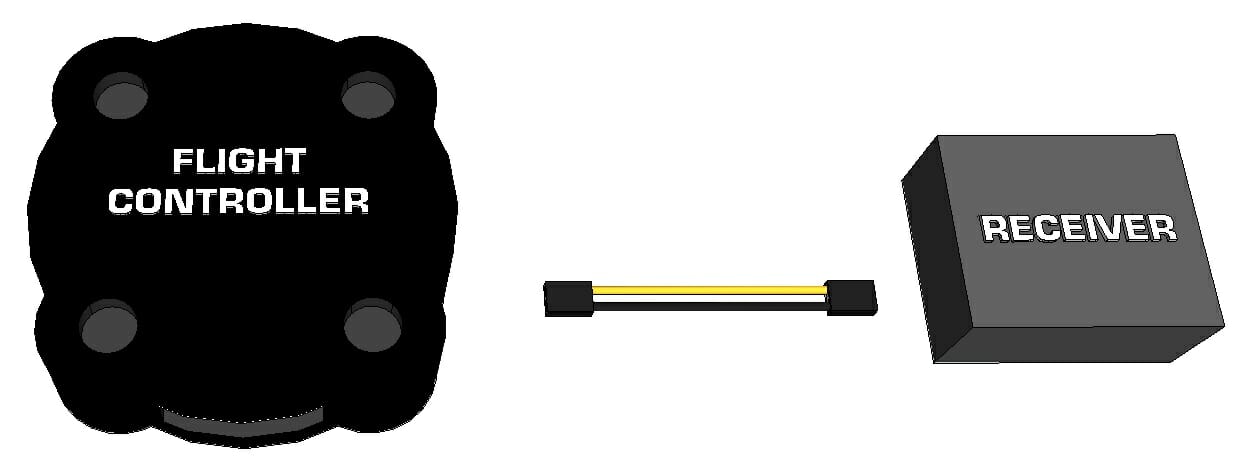
Empfänger. Flugkontrolleur.
Angenommen, Sie haben sich in dieser Lektion für die Funksteuerung als Eingabegerät entschieden. Wenn Sie WiFi, Bluetooth oder eine andere Eingabemethode verwenden möchten, lesen Sie bitte das Handbuch des Flugreglers und suchen Sie nach der seriellen Eingabe; In diesem Abschnitt wird beschrieben, wie / wo das serielle Eingabegerät an den Flugregler angeschlossen wird. Sie müssen höchstwahrscheinlich die Sende- (Tx), Empfangs- (Rx), Spannung (5 V) und GND-Pins vom drahtlosen Gerät zum Sender finden und verbinden, um Rx von einem zum anderen Tx und umgekehrt zu ermöglichen.
Ihr RC-Sender muss mit einem geeigneten RC-Empfänger geliefert werden. Der Empfänger muss an den Sender gebunden werden, damit Sie den Binde-Jumper vom Empfänger (falls vorhanden) entfernen können. Das Kit kann auch einen AA-Batteriehalter enthalten, der den Empfänger mit Strom versorgt, aber wir werden ihn nicht verwenden, da das BEC sowohl den Empfänger als auch den Flugregler mit Strom versorgt. Um herauszufinden, welche RC-Empfängerkanäle mit welchen Pins am Flugregler verbunden sind, müssen Sie sowohl in der Bedienungsanleitung des Flugreglers als auch der RC-Anlage nachsehen.
Das Flugreglerhandbuch zeigt die Positionen der folgenden Pins an, die angepasst und mit dem Empfänger verbunden werden müssen:
- Gas
- Pitch
- Yaw
- Roll
- Aux-Schalter 1, 2, 3 usw.
Sie können nun folgende Verbindungen herstellen:
- Lesen Sie das Handbuch des Flugreglers, um zu sehen, welcher R / C-Eingangspin angeschlossen ist mit welcher der oben genannten Funktionen.
- Lesen Sie in der Bedienungsanleitung des Senders, welcher Kanal mit welcher Funktion verbunden ist.
- Einige RC-Sender können umprogrammiert werden, um die Funktion jedes Kontakts zu ändern. Wenn Sie einen Eingang (Joystick oder Schalter) ändern möchten, tun Sie dies nur, nachdem Sie sich vergewissert haben, welcher Kanal am Empfänger welcher Funktion entspricht. Throttle, Pitch, Yaw und Roll sollten immer mit zwei Knüppeln/Joysticks verbunden werden, nicht mit Schaltern oder Knöpfen.
- Verbinden Sie den Gaskanal des Empfängers mit dem Gaseingang des Flugreglers.
- Verbinden Sie den Pitch-Kanal des Empfängers mit dem Pitch-Eingang des Flugreglers.
- Verbinden Sie den Yaw-Kanal des Empfängers mit dem Yaw-Eingang des Flugreglers.
- Verbinden Sie GND am Flugregler (normalerweise die dritte Stiftreihe) mit GND am Empfänger (normalerweise die dritte Stiftreihe).
- Wenn der Aux-Eingang verwendet wird, verbinden Sie Aux 1 am Empfänger mit Aux 1 am Flugregler usw.
Sie können für jeden Kanal 3-polige Servokabel verwenden, aber nur einer der Kanäle (kann beliebig sein) muss Spannung und Masse haben; der Rest braucht nur eine Signalleitung. Alle Verbindungen können GND zu GND sein, obwohl nur einer erforderlich ist. Auch hier benötigt der Empfänger keinen separaten Akku, da er vom Flugregler gespeist wird, der vom BEC von einem der ESCs gespeist wird.
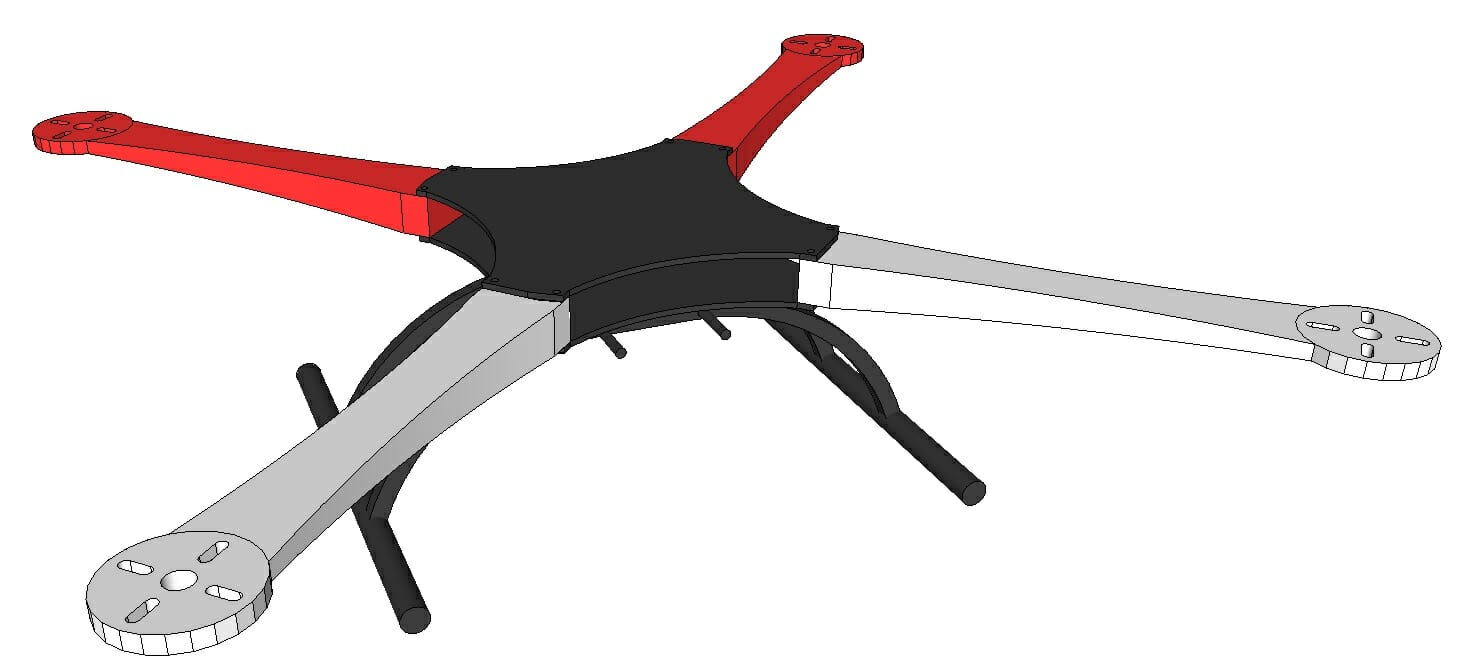
Zusammenbau des Rahmens
Wenn Sie Ihren eigenen Rahmen bauen, können Sie ihn jetzt zusammenbauen. Wenn Sie ein Rahmenkit gekauft haben, befolgen Sie die Montageanleitung. Bitte beachten Sie, dass Sie möglicherweise bestimmte Bereiche demontieren müssen, um das Anschließen zu erleichtern oder elektrische Elemente zu entfernen (auszublenden). Das Ziel ist, dass nichts lose ist, alle Drähte sicher befestigt sind und nichts aus dem Rahmen fallen oder sich verheddern kann.
Installation
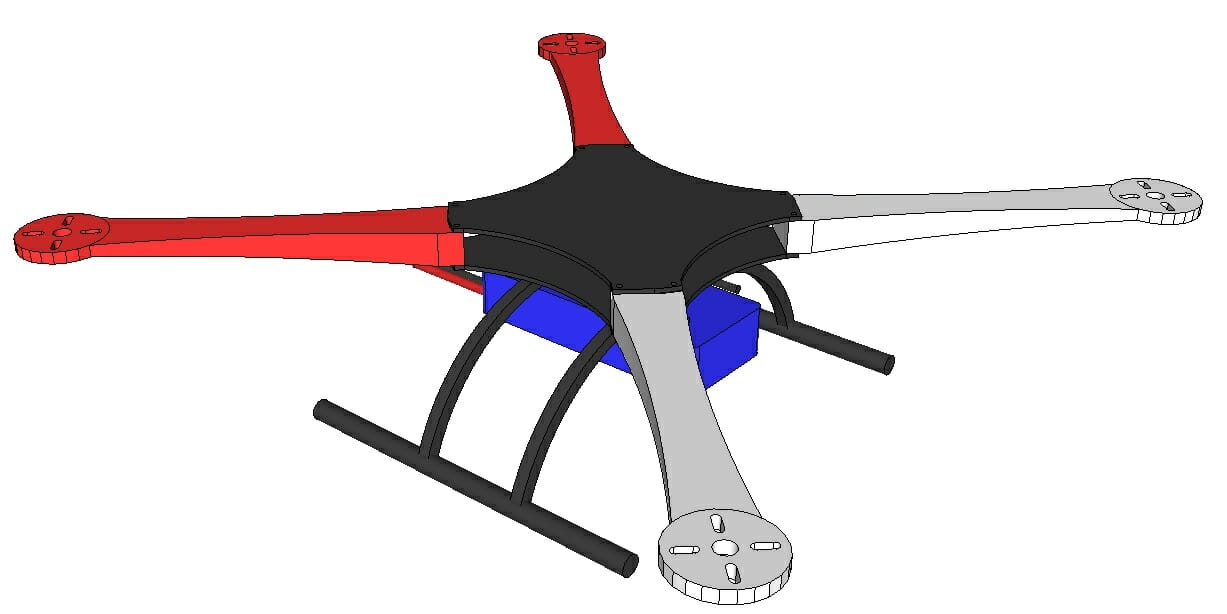
Batterieposition.
Die Batterie, die für die Stromversorgung verwendet wird, ist oft das schwerste Element eines UAV und kann von 1/4 bis 1/2 seines Gesamtgewichts reichen. Daher ist der Ort seiner Installation sehr wichtig. Der ideale Standort für die Hauptbatterie sollte in der Mitte des Flugzeugs liegen, damit alle Motoren ungefähr die gleiche Last bewältigen können. Wenn sich die Batterie näher am Heck des Flugzeugs befindet, müssen die Heckmotoren mehr Schub liefern als die Frontmotoren, und daher ist der maximale Gesamtschub begrenzt (wenn die Heckmotoren auf vollem Schub sind, gibt es keine Schub auf die vorderen Motoren). Während der übliche Ansatz beim Multi-Rotor-Design darin besteht, das Flugzeug symmetrisch um eine Mittellinie (oder zumindest eine Achse) zu halten, sollte die Batterie entlang dieser Mittellinie platziert werden und nicht zu einer Seite oder der anderen versetzt...
Als nächstes müssen Sie entscheiden, in welcher Höhe Sie den Akku platzieren möchten. Es gibt mehrere Stellen, an denen der Akku installiert werden kann:
- Unter dem Rahmen (das Flugzeug wird darunter schwer, stabiler und weniger akrobatisch).
- Direkt unter den Motoren (normalerweise im Rahmen); möglicherweise einer der besten Orte.
- Auf gleicher Höhe wie die Motoren oder Rotoren (zB oben am Rahmen montiert).
- Über den Propellern (das UAV wird oben schwerer und anfälliger für Umkippen).
Für beste Leistung sollte sich die Batterie idealerweise in Position 3 oben befinden. Position 4 erzeugt den Effekt eines umgekehrten Pendels, und wenn das UAV über einen bestimmten Winkel hinaus kippt, neigt die Drohne dazu, umzukippen. Position 1 schafft eine ziemlich stabile Plattform, die von Natur aus dazu neigt, waagerecht zu bleiben, aber für Akrobatik extrem ungeeignet ist. Daher wählen die meisten Designer Position 2 und platzieren den Akku entweder direkt unter dem Rahmen oder darin. Dieser Ansatz schafft Platz unter dem Rahmen für Nutzlasten wie das Federungssystem und Platz oben für den Flugregler und andere Elektronik, um so gut wie möglich zugänglich zu sein.
Akkubefestigung
Es gibt viele gängige Möglichkeiten, den Akku am Rahmen zu befestigen, darunter:
- Klettbänder
- Selbstklebender Klettverschluss (eine Seite wird mit dem Akku und die andere mit dem Rahmen verklebt)
- Im Rahmen
Klettbänder sind am häufigsten für mittlere “ kundenspezifische Drohnen in Standardgröße Während das Rahmengehäuse am häufigsten bei kommerziellen Drohnen zu finden ist, werden die Rahmen solcher UAVs unter Druck konzipiert und lassen im Inneren speziell Platz für eine bestimmte Batterie. Klettverschluss sollte idealerweise nur verwendet werden, wenn der Akku relativ leicht ist; Anstelle eines kurzen Abschnitts in der Mitte empfiehlt es sich, einen Streifen über die gesamte Länge des Akkus zu kleben. Wenn Sie Klettbänder verwenden und feststellen, dass der Akku aufgrund mangelnden Halts zum Herausspringen neigt, wird empfohlen, Gummistreifen an den Stellen anzubringen, an denen der Akku die Bänder berührt. Es wird nicht empfohlen, den Akku mit Klebstoff am Rahmen zu befestigen. Wenn Sie kein UAV verwenden, entfernen Sie den Akku und bewahren Sie ihn in einer sicheren LiPo-Tasche oder einem Keramikbehälter auf.
Aufladen des Akkus
Es ist sehr wahrscheinlich, dass Sie sich für einen Lithium Polymer (LiPo) oder einen anderen Lithium Akku entschieden haben. Die meisten LiPo-Akkus über 3,7 V verfügen über ein separates Ladekabel mit einem mehrpoligen Anschluss zum Laden, während das Stromkabel an einem zweipoligen Anschluss mit größeren Drähten zu erkennen ist, die hohen Entladeströmen standhalten können. Ein Ladestecker hat normalerweise einen Kontakt für jede Batteriebank sowie einen gemeinsamen Massekontakt.
Aufgrund der Gefahren im Zusammenhang mit LiPo-Akkus (Wasserstoff und Strom) ist es üblich, den Akku bei Nichtgebrauch vollständig aus der Drohne zu entfernen und in eine LiPo-Safe-Tasche zu legen. Die gleiche Tasche wird zum Laden des Akkus verwendet (Akku an Ladegerät anschließen, Akku in die Tasche legen (Ladegerät außerhalb der Tasche lassen) und schließen (normalerweise mit Klettverschluss).
.Platzierung und Montage des Flugreglers
Idealerweise sollte der Flugregler in der Mitte der Drohne auf gleicher Höhe wie die Motoren platziert werden. Wenn dies nicht möglich ist, kann der Controller platziert werden etwas höher oder niedriger Richtung nach links oder rechts und vermeiden Sie die Montage nach vorne oder hinten. Wenn Sie einen Rahmen für ein UAV gekauft haben, dann haben diese oft Befestigungslöcher für den Flugregler, die an der optimalen Stelle sind Controller kann auf eine der folgenden grundlegenden Arten befestigt werden:
- Schrauben / Muttern / Pfosten (einfach)
- Doppelseitiges Klebeband (auf ausreichende Festigkeit achten)
- Doppelseitiges Schaumstoffband (zu erreichen Dämpfungswirkung)
- Gummi-Dämpfungsbuchsen (für hohe Dämpfung)
Einige Flugregler haben oder haben eine optionale Schutzhülle.
Zu diesem Zeitpunkt sollten Sie ein vollständig montiertes und angeschlossenes UAV ohne die Propeller haben. Lektion 6 beinhaltet das Einrichten und Testen des Senders, der Flugsteuerungssoftware, der Vorflugkontrolle und des Erstflugs.







