
- 1 Introduction
- 2 The developer about the machine
- 3 Features
- 4 Package contents
- 5 Specification
- 5.1 Drone
- 5.2 Communication
- 5.3 Navigation System
- 5.4 Skycontroller 4
- 5.5 Aircraft Intelligent Battery
- 5.6 App
- 5.7 Camera
- 5.8 Autonomous flight modes
- 5.9 Cybersecurity
- 5.10 Parrot SDK
- 6 Appearance
- 7 Communication
- 7.1 4G
- 7.2 Max. range with 4G connection
- 7.3 Wi-Fi
- 7.4 Live video
- 8 Camera
- 8.1 48MP matrix
- 8.2 Lens
- 8.3 Video modes
- 8.4 Video Encoding
- 8.5 HDR
- 8.6 Photo Modes
- 9 Hybrid stabilization
- 9.1 Main camera gimbal
- 10 Photogrammetry
- 10.1 Inspection and cartography
- 10.2 AI and 4G capabilities
- 10.3 Autonomous flight
- 11 Photogrammetry or lidar
- 11.1 Photogrammetry pros
- 11.2 LIDAR cons
- 12 SDK
- 12.1 Air SDK
- 12.2 Ground SDK
- 12.3 OpenFlight
- 12.4 Sphinx
- 12.5 Olympe
- 12.6 PdrAW
- 12.7 Models C. A. D.
- 12.8 MAVLink and GUTMA compatibility
- 13 Largest partner ecosystem for Parrot drones
- 13.1 Parrot for any business need
- 14 Cybersecurity
- 14.1 Data Privacy
- 14.2 FIPS140 Compliant -2 and certified by CC EAL5 Secure Element
- 14.3 4G Secure Connection and Strong Authentication
- 14.4 Secure Initialization and Upgrade
- 14.5 Setting User Keys on the Secure Element
- 14.6 Digitally Signed Photos
- 14.7 Transparency and Continuous Security Check with Bug bounty
- 15 Data Management
- 15.1 Collected Data
- 15.2 Final Use of Collected Data [1 26]
- 15.3 Improvement of artificial intelligence (AI)
- 16 Flight characteristics
- 16.1 Aerodynamic characteristics
- 16.2 Actuators and aerodynamics
- 16.3 Sensors
- 16.4 Sensor characteristics
- 16.5 Autopilot
- 17 Autonomous flight
- 17.1 Key features
- 17.2 Perception system strategy
- 17.3 Sensors
- 17.4 Double suspension
- 17.5 Reconstruction of the environment
- 18 Flight Missions
- 18.1 Key Features
- 19 Price and Availability
- 20 Download Documentation
- 21 Videos
Introduction [16 4]
Parrot Anafi Ai is a completely new unique solution from a well-known French developercommercial use
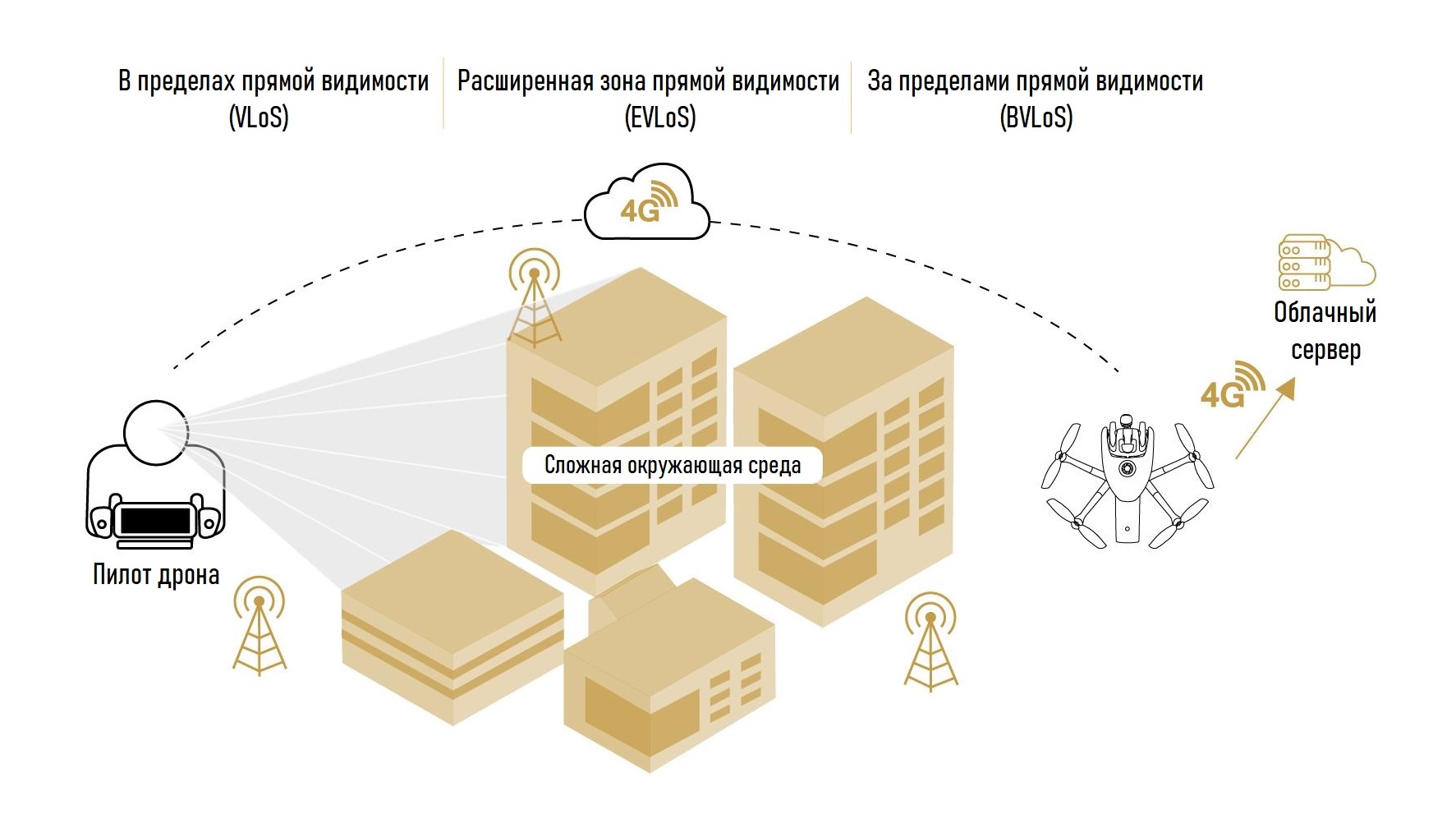
Anafi Ai's calling card is the built-in 4G module, thanks to which the drone was able to use the fourth generation of mobile communications as the main data transmission channel between the drone and the control equipment, which actually removes all restrictions on the flight range and predetermines the operation of the UAV outside line of sight. Looking ahead, we note that the declared potential of the machine turned out to be incredibly powerful and more than ever corresponds to its futuristic appearance, which was inspired by nature to create French engineers.
The developer about the car
Martin Liné, marketing director at Parrot, Parrot drones

Features
Key features of Parrot Anafi Ai:
- Weight 898 grams
- Time to fly 60 seconds
- Unique portable foldable design
- Built-in 4G communication module for full drone / control equipment interaction without restrictions in all environmental conditions
- Compatible with LTE worldwide
- Equipped with omnidirectional signal transmission system (4 directional antennas with reflector (gain: 2.5 dBi / s antennas). The drone determines the best pair of antennas depending on its orientation and position relative to the pilot position)
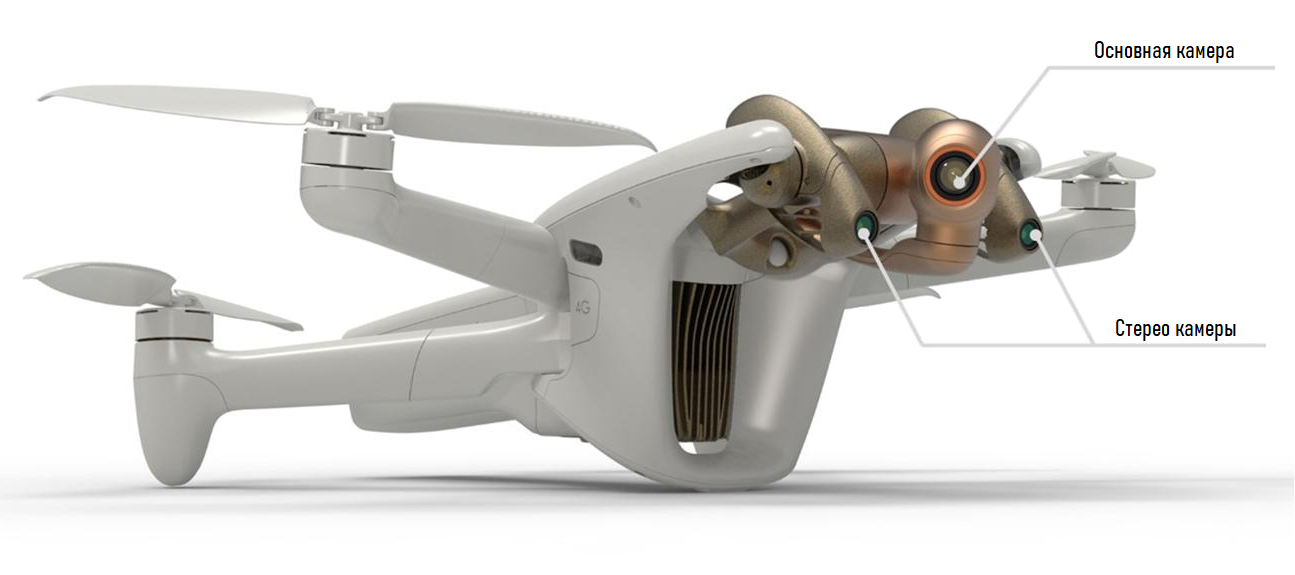
- Equipped with a unique omnidirectional imaging system of the surrounding world built on a pair of stereoscopic cameras mounted on a specialized gimbal with a 330-degree pan range (-120 ° to 210 °), working in tandem with an intelligent optimization system. flight paths
- Adapted for indoor flight
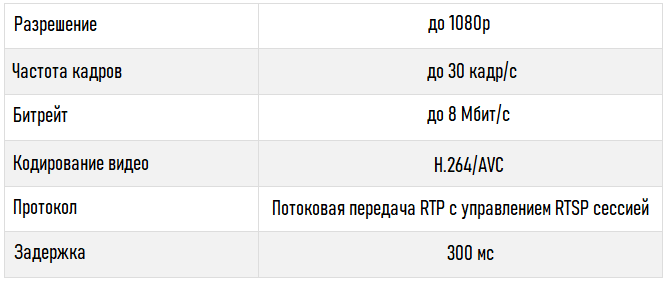
- Live video streaming in 1080p with low latency (300 m / s) with no range restrictions anywhere in the world, with video bitrate 12 Mbps
- Ability to transfer files to cloud storage directly in flight
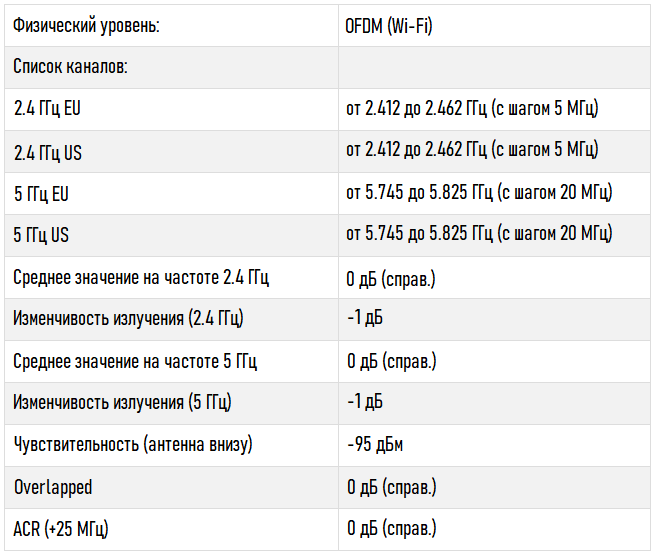
- Built-in Wi-Fi communication module (Wi-Fi 802.11a / b / g / n) for full drone / equipment interaction control (as an alternative connection option)
- Slave. Wi-Fi frequency range: 2.4GHz / 5.8GHz
- Max. range of FPV flight over Wi-Fi: 9 km
- Unique automatic mode of operation of 4G / Wi-Fi modules, which allows, based on network congestion, to seamlessly switch from one communication technology to another without data loss
- Protection class drone IPX3
- Max. flight time 32 min
- Max. horizontal flight speed 61 km / h
- Max. wind resistance: 13 m / s
- Max.ceiling above sea level 5000 m
- 48MP 4K camera built on 1/2-inch CMOS matrix with a pixel size of 0.8 microns; with built-in Bayer color filter array
- Optical LD-ASPH lens
- Hybrid 6-axis image stabilization system (3-axis mechanical 3-axis digital EIS)
- Controllable operating range gimbal -90 ° to 90 °
- 6x lossless digital zoom (2x in 4K mode / 4x in FHD mode)
- Max. video bit rate 200 Mbps
- Video recording formats HDR8 / HDR10
- Max. dynamic range 14EV
- P-log color profile for post-processing
- 5 × automatic flight and shooting modes (Photogrammetry / Flight Plan / Cameraman / Smart RTH / Vehicle)
- Built-in slots for MicroSD and SIM cards
- Compatible with PIX4D Suite
- Photogrammetric flight modes are available in mob. FreeFlight 7 app and OpenFlight software
- One-click flight plan creation
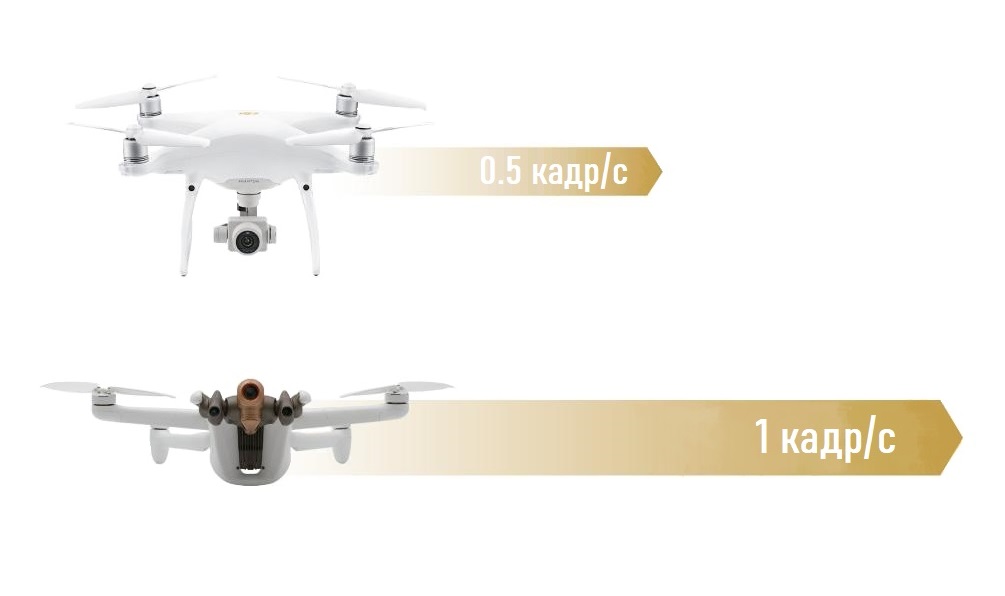
- 48MP 1 fps photogrammetry: twice as fast as competitors
- Shooting accuracy: 0.46 cm / pix. GSD 30m
- Parrot SDK support (with the ability to embed your code into the drone using the Air SDK, create mobile applications using the Ground SDK, configure an open source ground station using OpenFlight, interact with the modern Sphinx drone simulation tool as well as Python scripting with Olympe and video and metadata processing with PdrAW)
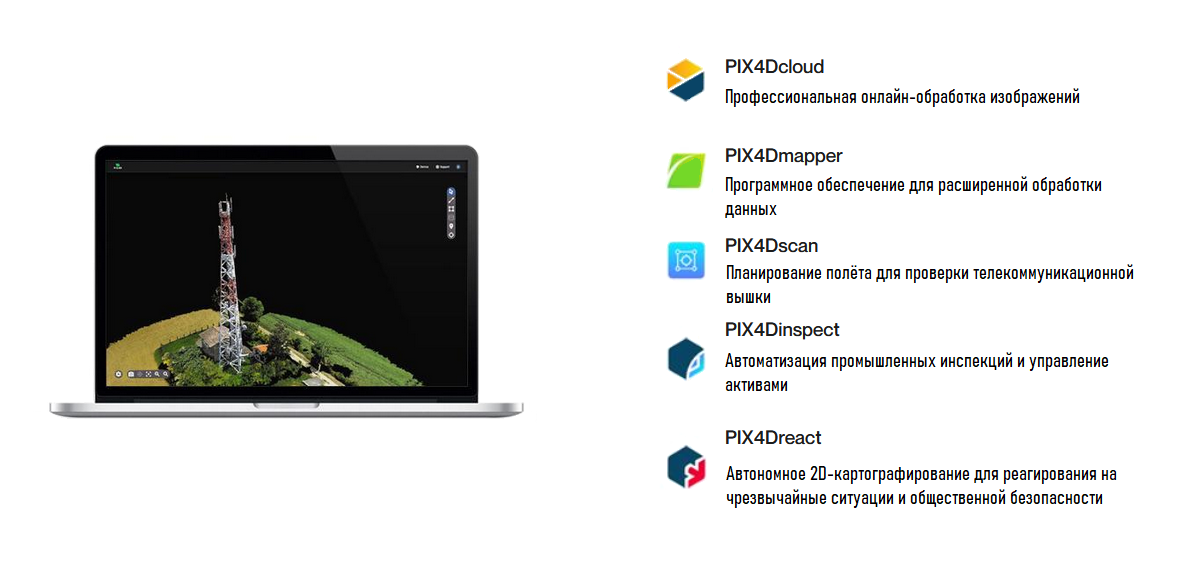
- Compatible with 3rd party software: PIX4Dscan, PIX4Dinspect, PIX4Dcloud, PIX4Dreact, PIX4Dsurvey
- ANAFI Ai complies with General Regulations European Union Data Protection Regulation (GDPR)
- Superior data privacy with embedded NIST FIPS140-2 Level 3 WISeKey Secure Element with Common Criteria EAL5 certification
- Video and controls are protected with SRTP / DTLS according to webRTC
- New Parrot Skyco portable control equipment ntroller 4
- New mobile application Parrot FreeFlight 7

Package
The developer offers the drone in a single configuration, which will include:
- Drone ANAFI Ai
- Rigid transport case
- Control equipment Parrot Skycontroller 4
- 1 × Smart battery
- USB-PD Charger
- Spare Propeller Kit (2CW / 2CCW)
- Companion Cable (USB-C to Lightning)
- 2 × Companion Cables (USB -C to USB-C)
- Calibration Chart

Specification
Aircraft

Communication
Navigation system
Skycontroller 4

Aircraft Intelligent Battery
App

Camera

Autonomous flight modes
Cybersecurity
Parrot SDK
Next, you can familiarize yourself with the key information of the Parrot Anafi Ai, which will allow you to learn more about the declared potential of the machine, as well as what improvements have been implemented in comparison with the commercial version of the drone Parrot Anfi Thermal and other drones from leading brands.
Appearance





Communication
4G
ANAFI Ai includes 4G radio module (in addition to the Wi-Fi radio module), which allows you to broadcast a video stream in 1080p quality with a maximum bitrate of 12 Mbps, with a very low latency (300 ms), without limitation in range and anywhere in the world.
Compatibility
The ANAFI Ai 4G module supports over 28 frequency bands, covering more than 98% of the frequencies deployed worldwide.
Automatic Network Switch
Quality and bandwidth of 4G and Wi-Fi networks are measured every 100ms to adapt streaming to network conditions. Combined with routing algorithms, the connection between the drone and its controller is maintained even when Wi-Fi is severely disrupted. Thus, when the effective bandwidth (usable bandwidth) of Wi-Fi is below 1.5 Mbps, the system will automatically switch to 4G.
To limit the consumption of mobile data when the pilot is within range of the drone's Wi-Fi network, the transition from 4G to Wi-Fi is also performed automatically without cutting off the video stream.
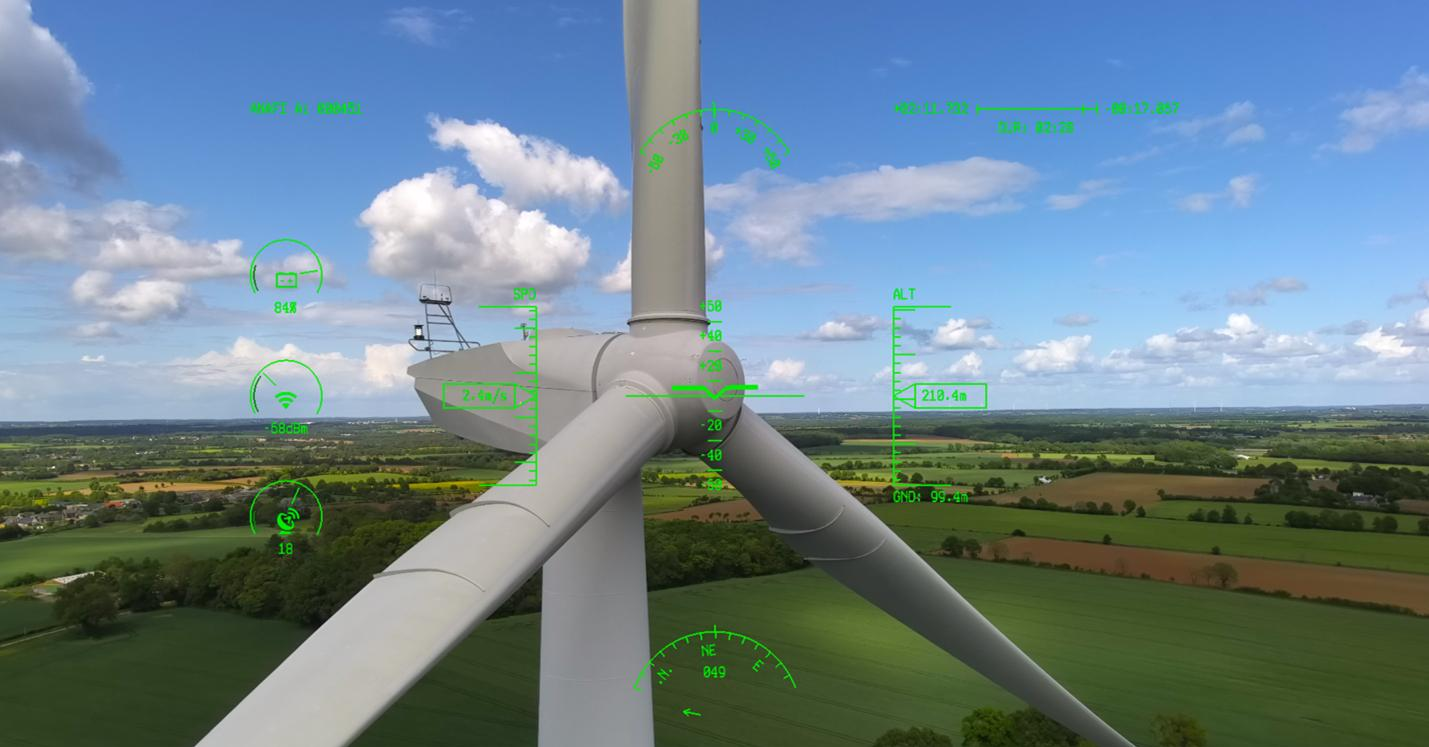
Max. range with 4G connection
The video from the developer shows the max. flight range of Anafi Ai with 4G connection in one direction on one battery charge. The total flight time was 29 minutes at an average horizontal flight speed of 58 km / h (16 m / s). During this time, the drone was able to cover 27 km. You can also notice that the flight was carried out in strong wind conditions, which was constantly warned by the drone system.
Implemented video stream optimization algorithms
4G congestion control
Congestion control algorithm allows:
- Measure packet loss over the entire network cycle.
- Measure latency (round trip time).
- Adjust the bandwidth according to these two parameters.
The ultimate goal of the algorithm is to maximize the available bandwidth while maintaining the lowest possible latency. This algorithm is implemented on each of the interfaces available in the drone, each with its own parameters, optimized according to the network. Based on the information provided by this algorithm, the link manager makes routing and active interface decisions.
Controlling the drone via 4G connection
ANAFI Ai connects to the remote controller via 4G in less than 30 seconds if the drone is out of range of Wi-Fi, and in less than 15 seconds if the drone is within the Wi-Fi range. And also 4G connection provides:
- Detection and initiation of a connection based on the VOIP SIP protocol.
- Use a relay server to establish connections over secure networks.
Video stream performance
- Latency: 300 ms.
- Security: video and controls are protected with SRTP / DTLS according to webRTC.
- Antennas: 28 LTE bands from 700 MHz to 2.6 GHz.

Wi-Fi
Omni-directional transmission system
- ANAFI Ai has 4 directional reflector antennas (with antenna gain: 2.5 dBi / s). The drone determines the best antenna pair based on its orientation and position relative to the pilot's position.
- With a recombined gain of 3.5 / - 1.5 dBi in the horizontal plane of the drone, the ANAFI Ai RF gain is highly uniform.
- Downstream antenna radiation has been improved by 4 dB over ANAFI.
External design of the high power radio
The front of the radio maximizes the power at the base of the antenna with very good linearity and sensitivity (-94 dBm at 6.5 Mbps) to achieve the maximum FCC limiting power.

Wi-Fi reliability
802.11 parameters
low bandwidth, low latency, variability of the reception level due to the speed of the drone, long range, presence of interference. These parameters include aggregation, retry count, MiMo technology (STBC), control frame data rate, and disconnect conditions.
Intelligent Interference Prevention
ANAFI Ai has an algorithm for channel deletion (2.4 GHz and 5 GHz dual band) in case of interference.
Adaptation and flow monitoring
ANAFI Ai continuously monitors the status of its 4 Hz link and can detect interference. This allows you to dynamically optimize the bandwidth and the size of the transmitted packets. It also alerts the pilot if he is in a particularly jamming environment or is about to lose signal.
Bandwidth reduction
At the limit of its range and if conditions permit it, ANAFI Ai can switch to 10 MHz bandwidth to improve its sensitivity by 3 dB and increase the range by 40%.

Radio indicators
Video broadcast
Video link indicators
Implemented video stream optimization algorithms
Parrot Gen4 Streaming (4th generation)
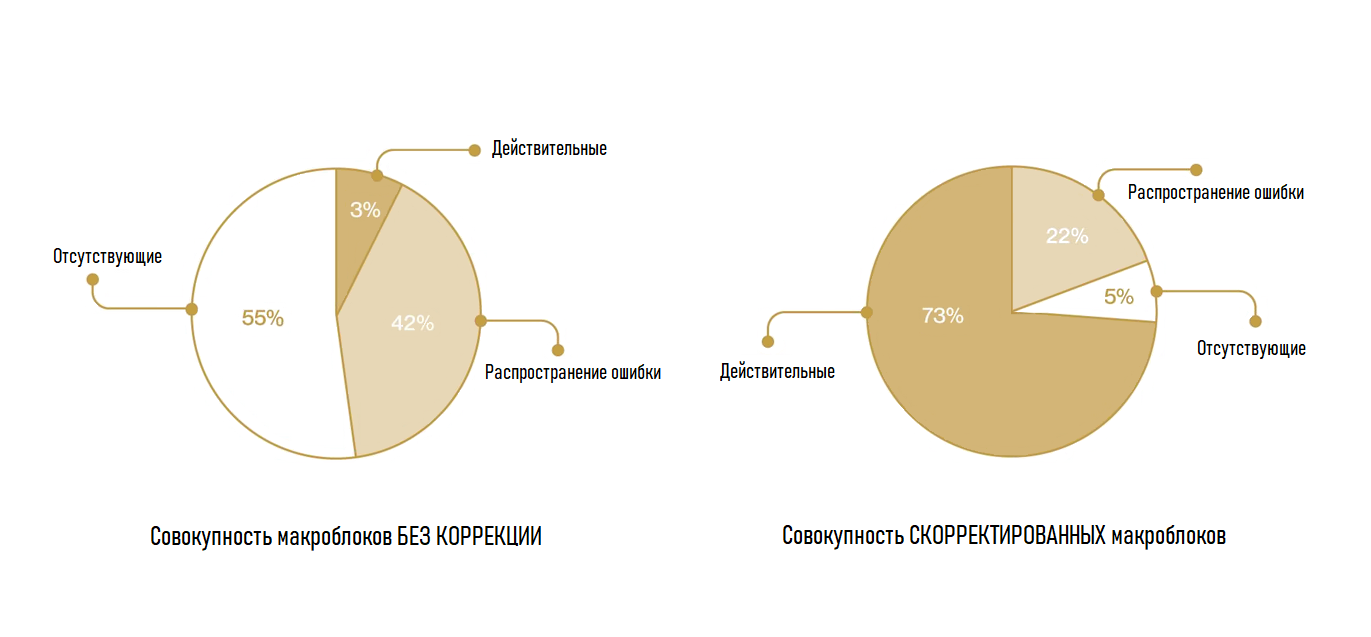
This algorithm reduces the visual impact of network losses and provides interoperability all decoders, while providing a syntactically complete stream: the missing parts of the picture are reconstructed as missing parts, identical to those in the reference picture.
Thus, faults are contained in those areas that are prone to loss, and do not apply to the entire image.
The graphs below show the success rate of macroblock decoding at 5% network loss - with and without ANAFI Ai advanced streaming features. The algorithm ensures correct decoding of 75% of macroblocks. They allow the user to continue their mission without freezing the screen or losing streaming.
Congestion Control
The algorithm also evaluates the Wi-Fi and radio environment to anticipate and avoid packet loss and network congestion, which helps reduce latency. The algorithm is based on an estimate of the channel capacity, calculated based on the data rate and error rate at the physical layer; then it affects the network coding and encapsulation parameters.
Metadata
Metadata is transmitted with the video stream. In particular, they contain drone telemetry elements (position, altitude, speed, battery level, etc.) and video metrics (camera angle, exposure value, field of view, etc.).
Synchronization of images and open metadata performs the functions of precise positioning on the map, tracking flight instruments in the HUD, or enabling augmented reality elements.
Metadata is included using standard methods (RTP header extension); the data format defined by Parrot is open source: it is available in the ANAFI Ai SDK.
Camera

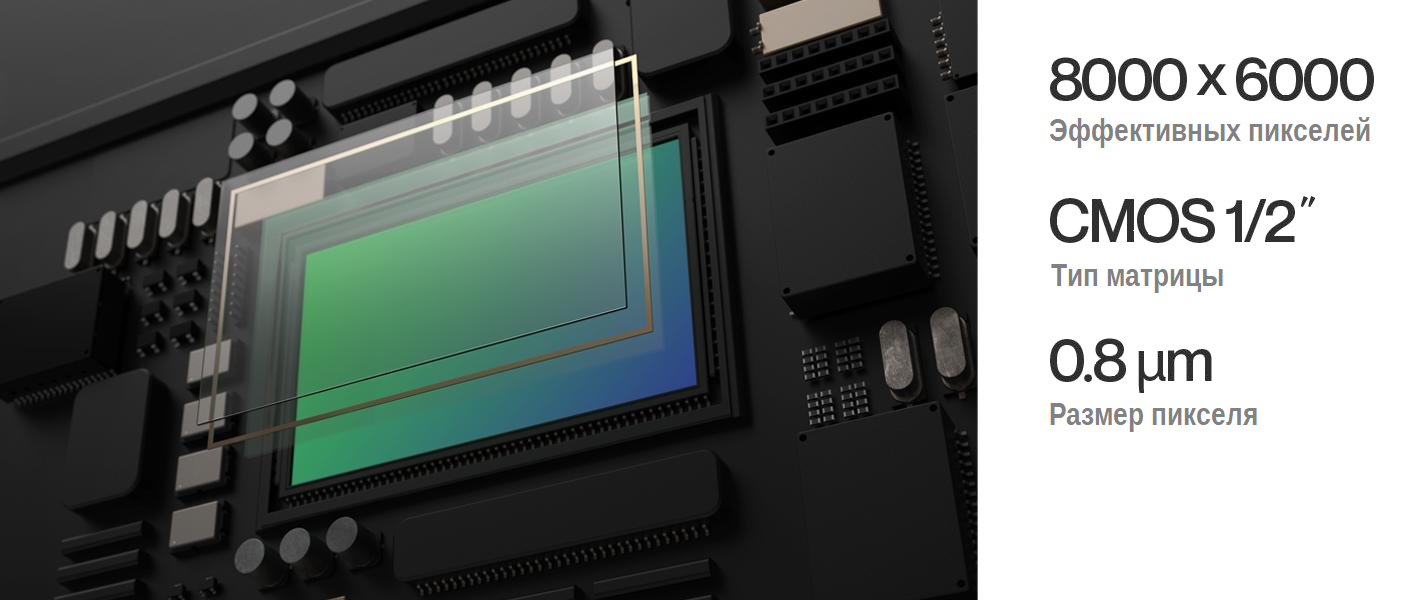
48MP sensor
ANAFI Ai matrix includes a large number of megapixels for detailed aerial photography.
It employs Quad Bayer color filter array technology where groups of 4 adjacent pixels have the same color. Thus, real-time HDR capture can be obtained in both photo and video modes by adding signals from four adjacent pixels.
Its dynamic range is 4 times that of standard Bayer matrices. Even complex scenes can be shot with minimal highlights or shadow loss.
Lens
The ANAFI Ai lens has been specially developed for Parrot. It combines 6 aspherical elements and is optimized to reduce optical flare. This lens gives 68 ° HFoV in standard video mode and 64.6 ° HFoV in standard photo mode.

Video modes
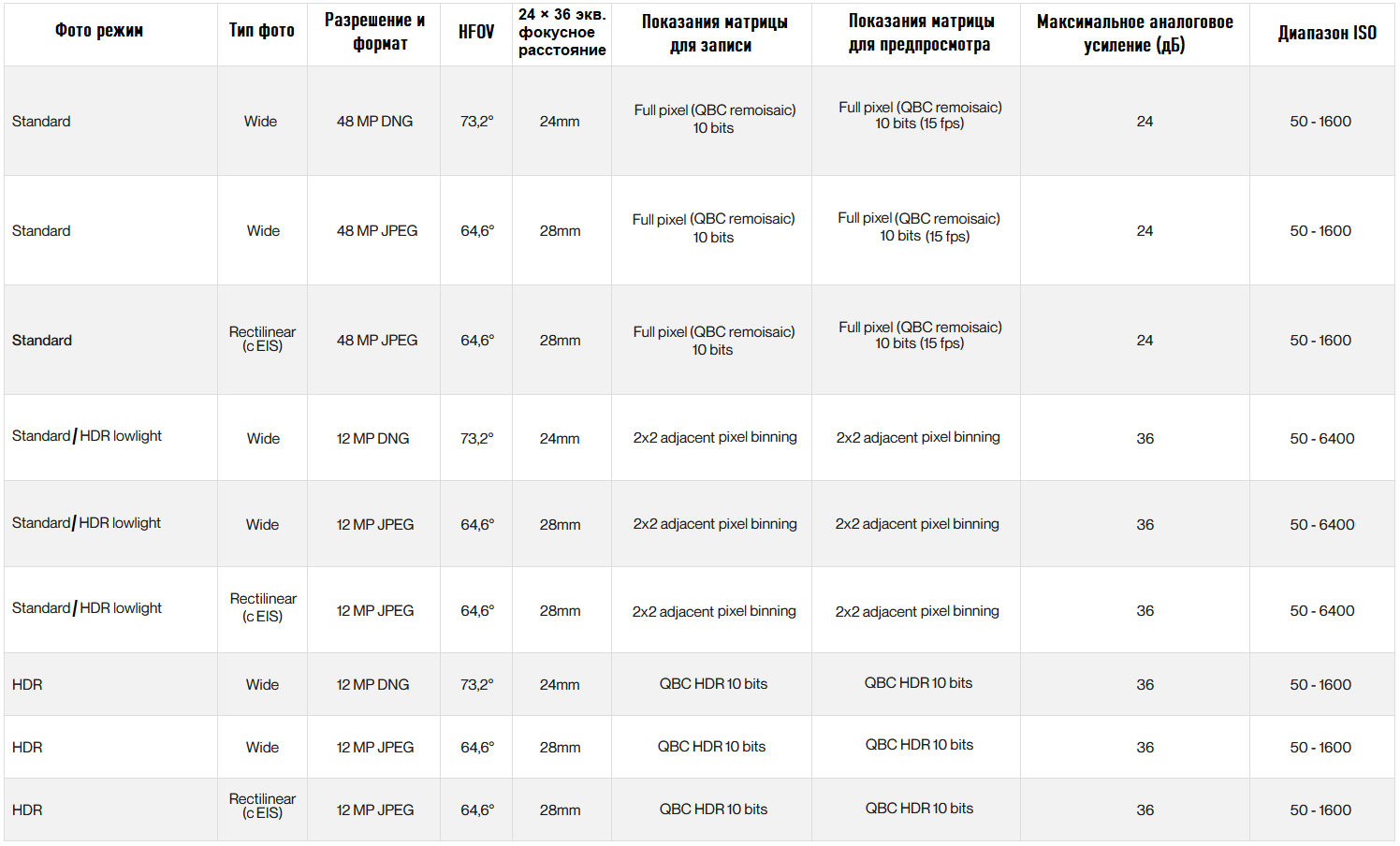
ANAFI Ai captures smooth 4K video at 60 frames per second, including P-Log, and See also HDR10 4K video at up to 30fps. The table below lists all ANAFI Ai video modes.

Video encoding
Users can choose between H.264 (AVC) and H.265 (HEVC).
All resolutions use the following pixel formats:
- YUV420p (8-bpc BT.709 color space) for standard mode and HDR8.
- YUVJ420p (8 bits / component, full range - BT.709 color space) for P-log style.
- YUV420p10 (10bpc BT.2020 color space) for HDR10 recording, H.265 only.
HDR
When recording video in HDR8 and HDR10, ANAFI Ai covers a dynamic range of 14EV. The HDR10 format offers a maximum brightness of 1000 nits and a color depth of 10 bits. It provides a billion color gamut versus 16 million for standard dynamic range. Compared to HDR8, HDR10 produces images more than twice as bright with a corresponding increase in contrast. HDR8 can be displayed on any standard screen, while HDR10 is for TVs and HDR10 screens.
Photo Modes
Description of Modes
The Mode Control section contains settings that affect the number of shots that are taken each time the shutter is released.
Single capture mode
Standard single capture mode. After each shutter release, the captured image is immediately processed by the system.
Bracketing mode
Users can shoot a series of 3, 5, or 7 frames with different exposures for each frame. The following presets are available:
- [-1 EV, 0, 1 EV] (default settings)
- [-2 EV, -1 EV, 0, 1 EV, 2 EV]
- [-3 EV, -2 EV, -1 EV, 0, 1 EV, 2 EV, 3 EV]

Burst mode
Burst mode will allow the user to take a burst of 10 frames in 1 second.
Panorama mode
Panorama mode includes four different panoramic shots:
- Spherical (360 °) is a panoramic mode includes three options for shooting a spherical panorama: Sphere / Little Planet / Tunnel.
- Horizontal (180 °)
- Vertical (109 °)
- Superwide - new super wide 9-image stitching mode (HFOV 110 °, straight panorama)
For details on panorama mode specifications, see the table below:

Timelapse mode
This mode allows you to take pictures at the following fixed time intervals:
- 48MP: 1, 2, 4, 10, 30 or 60 seconds.
- 12MP: 0.5, 1, 2, 4, 10, 30 or 60 sec.
GPS Lapse mode
This photo mode was developed for inspection and photogrammetry. It allows you to take pictures at the following fixed distance intervals: 5, 10, 20, 50, 100 or 200 meters.
The table below shows the still image capture modes and resolutions, including the Sensor Readout mode:
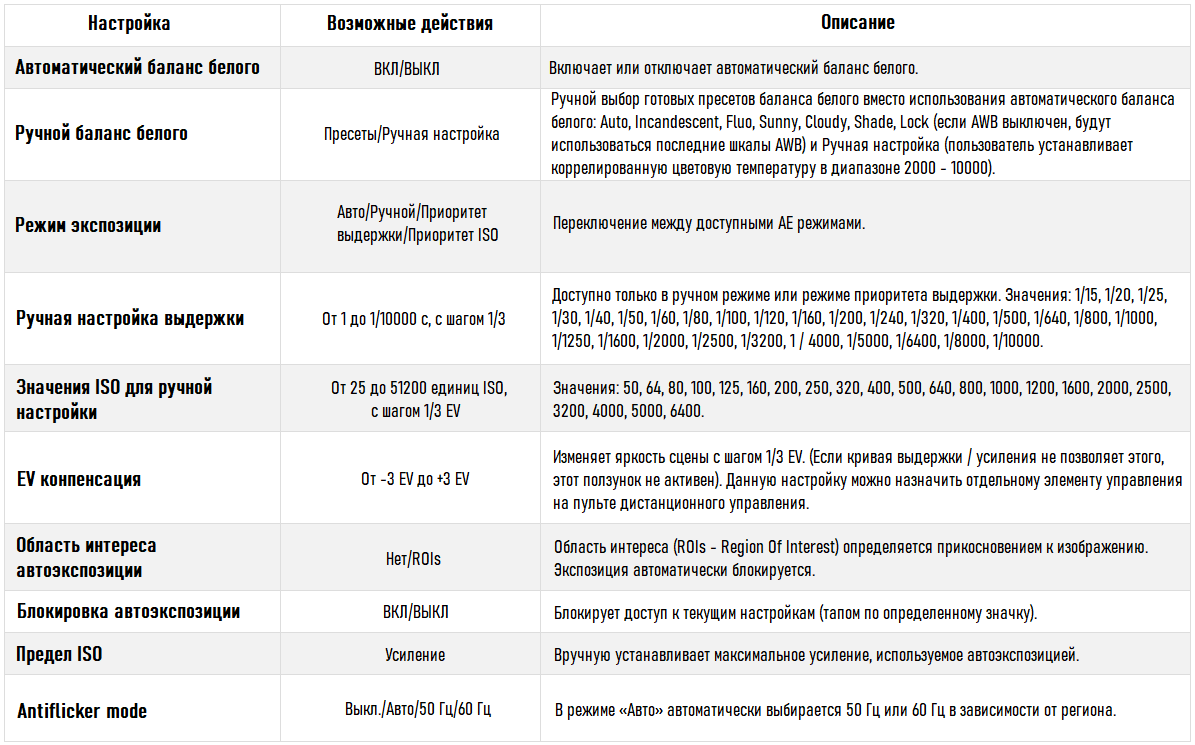
Settings
In the following The table lists the available settings for each mode.
6x zoom
Zoom is available in all photo and video modes. Combined with a 48-megapixel sensor, precise sharpening algorithms produce high-definition images even when using 6x digital zoom. ANAFI Ai users can now see 1cm detail from 75m away. The high pixel count also allows 4K video to be cropped to 1080p without loss of quality.

Hybrid stabilization
ANAFI Ai has the most accurate stabilization on the micro UAV market.
It combines combined stabilization:
- 3-axis mechanical (3-axis mech. Gimbal)
- Electronic 3-axis (EIS)
Mechanical stabilization stabilizes the camera pointing axis regardless of the flight position of the drone. Electronic Image Stabilization corrects the effect of micro-vibrations for frequencies above 100 Hz, which the mechanical drive cannot handle.
Main camera gimbal
Mechanical stabilization allows you to stabilize and orient the horizontal axis of the camera view in all 3 axes.
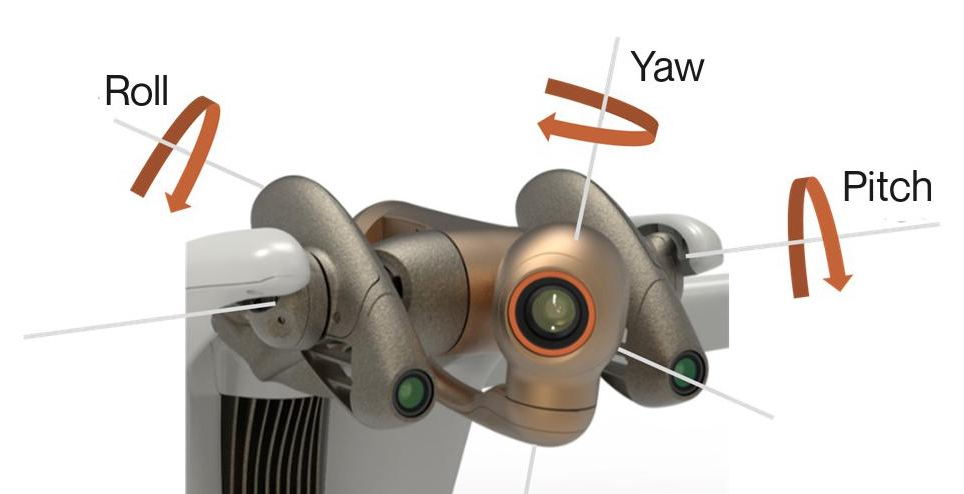 3 axes of rotation mech. suspension of the main camera ANAFI Ai.
3 axes of rotation mech. suspension of the main camera ANAFI Ai.
Key Features
- 3 Axis Mechanical Gimbal for Main Camera
- Vertical Offset 292 °, Field of View -116 ° to 176 °
Gimbal Performance
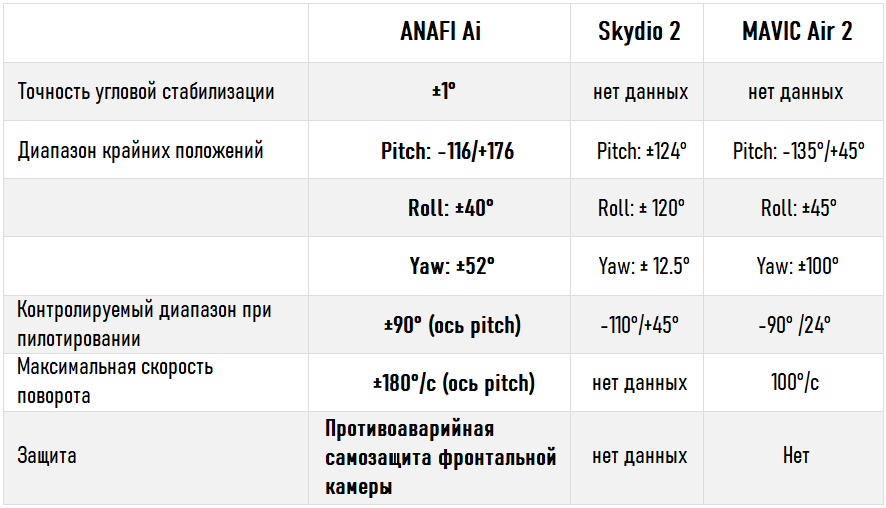
- The EIS algorithm corrects the effects of wobble and distortion of the wide-angle lens and also performs 3-axis digital image stabilization (Roll, Pitch and Yaw).
- The method consists in applying a geometric transformation of the image. Geometric transformation is associated with time stamp and exact position thanks to the IMU.
- Geometric transformation is applied to each image according to optical distortion, vibrations and movements of the measured camera unit.
Pivot range 292 °
The camera has a horizontal pivot range of -116 ° / 176 ° around the pitch axis, thus providing observation above and below the drone, which is a unique opportunity on the market micro-UAV.
![]()
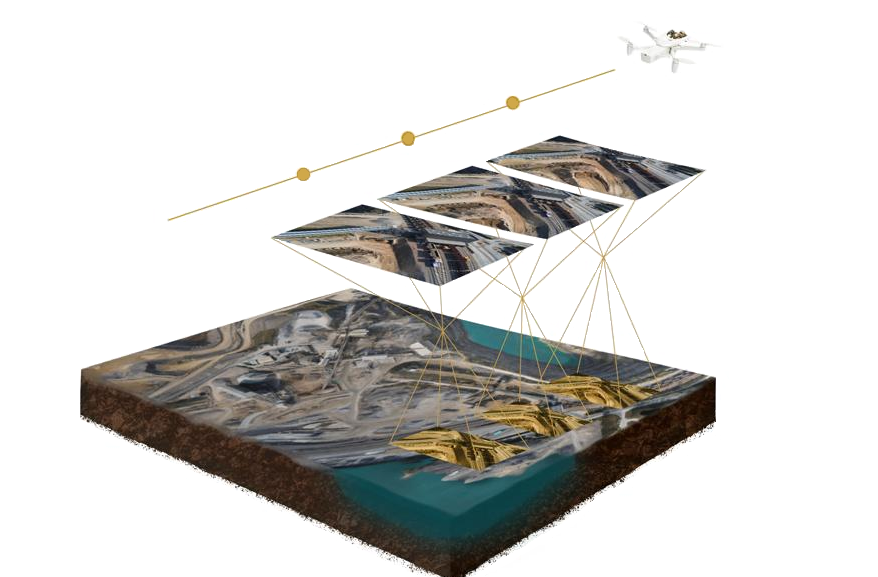
Photogrammetry
Aerial photography with unmanned aerial vehicles is changing the way specialists conduct inspections and surveying. Photogrammetry methods are used to process images collected by UAVs to create 2D and 3D models, which later allow customers to schedule maintenance of the surveyed objects in a timely manner.
4G provides unprecedented reliability of the drone data link. Users can operate UAVs over large areas, near metal structures, buildings, without fear of loss of communication.
Inspection and Mapping
By combining the AI of the ANAFI Ai drone with the PIX4Dinspect online platform, users will be able to conduct inspections faster and more efficiently than ever before. or. Machine learning algorithms recognize antennas on cell towers, determine their size, height, tilt, azimuth, and verticality.
Click on the images below to view demo 3D models generated by ANAFI Ai.
Example # 1

Example # 2
Best-in-class matrix
The camera of the ANAFI Ai drone is equipped with a 48MP 1/2-inch CMOS sensor built using Quad Bayer color filter technology, which is more suitable than ever for inspection and photogrammetry. The matrix used allows you to obtain detailed images with a wide dynamic range.
High Resolution Photos
ANAFI Ai is capable of generating 48 megapixel still images, thus capturing all the details in high resolution and creating a high density point cloud.
Significant Sharpness
Inspection missions require the ability to identify minute details such as serial numbers, connectors, rust stains, and incipient cracks.
Wide dynamic range
10 stops of dynamic range in standard mode, 14 stops in HDR mode. Optimal image gradation is essential to create consistent cloud points and high quality 2D or 3D reconstructions.
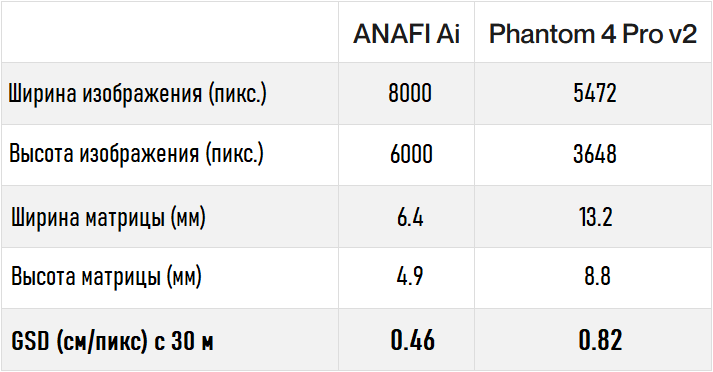
55% more detail than 1-inch sensors
48MP 1/2-inch Quad Bayer sensor of ANAFI Ai drone outperforms 20MP 1-inch sensors used in a number of modern professional drones. The following images from the ANAFI Ai and DJI Phantom 4 Pro V2.0 roof inspection at the same height clearly demonstrate this fact.

Ideal for inspections
The ANAFI Ai gimbal includes a 6-axis hybrid (mechanical electronic) stabilization system that compensates for flight fluctuations and ensures image sharpness. The ANAFI Ai camera has an adjustable range from -90 ° to 90 °, making it an ideal airborne instrument for viewing the underside of a bridge base.
Controllable tilt ± 90 °
Accuracy
ANAFI Ai allows users to achieve a GSD of 0.46 cm / px from a height of 30 m, which means relative accuracy planimetry up to 0.92 cm.
For comparison, at the same height the DJI Phantom 4 Pro V2 provides a GSD of only 0.82 cm / px. In other words, ANAFI Ai can map the same target, flying more than 1.5 times higher than the Phantom, with an equivalent level of detail.
AI and 4G capabilities
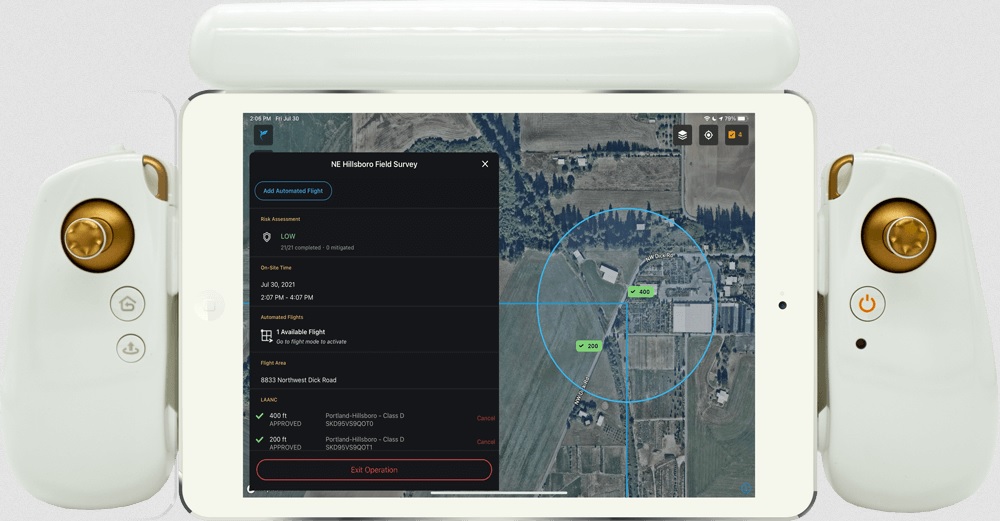
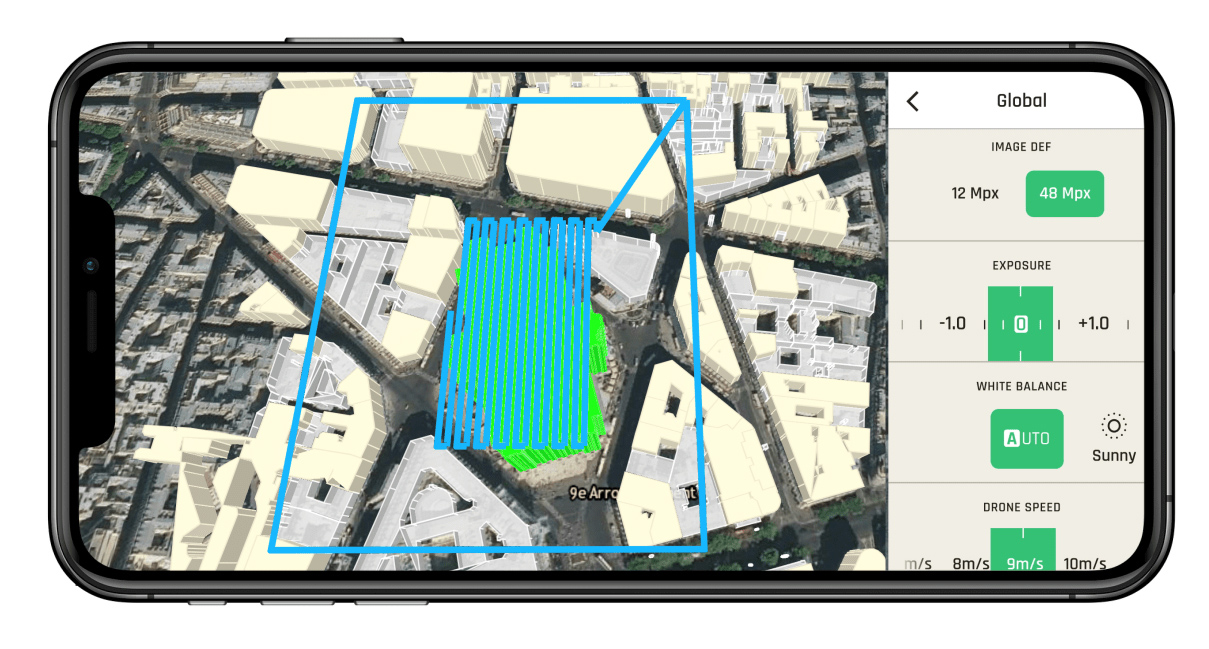
One app. Any Flight Plan
The potential of the FreeFlight 7 mobile application allows the user to launch all survey, inspection and photogrammetry missions.

Available photogrammetric flight modes
The following photogrammetric flight modes are now available in the FreeFlight 7 mobile application:
- Grid
- Double-grid
- Сircular
Create a flight plan in one tap
One tap on the FreeFlight 3D interactive map is all you need for quick scanning building. Artificial intelligence automatically determines the optimal flight parameters and trajectory. 48MP images with accurate georeferencing of ANAFI Ai sensors (IMU, GNSS and Flight Time) allow accurate 3D reconstruction.
 Automatic flight plan created with one tap in the 3D land registry.
Automatic flight plan created with one tap in the 3D land registry.
- FreeFlight 7's cartographic background is from ArcGIS software. The 3D building representation is based on OpenStreetMap data covering cities around the world.
- Visualization systems ensure the safety of a given flight plan: users do not need to worry about obstacles. ANAFI Ai avoids them autonomously.
Autonomous flight
The ANAFI Ai omnidirectional sensor system, based on stereoscopic vision, automatically orients itself in the direction of travel.

The drone detects obstacles that are 30 meters away. AI technology constantly builds and updates the infill grid while executing a given flight plan. It represents the drone environment in voxels.
The algorithms determine the best trajectory to avoid colliding with obstacles, while the drone remains focused on its target: the assigned flight mission.

4G connection
ANAFI Ai is the first commercial microdron equipped with a 4G module. It covers over 98% of the frequencies used worldwide.

Survey of high voltage power lines. Shot with ANAFI Ai, edited with Pix4Dmatic. Scene size: 4060 × 60 × 70 m. Number of images: 2172. GSD: 1.3 cm / pix. Height: 90 m. Front / side overlap: 90% / 65%.
The drone is able to seamlessly switch from Wi-Fi to 4G and vice versa, thus providing the most reliable connection, which in turn guarantees:
- The ability to perform BVLOS flights
- Stable connection even when flying in environments with obstacles and buildings
- Safe flying in high noise environments
- Video link quality 1080p @ 30 fps
- Direct upload of images to cloud servers

Flight time optimization
According to the developer, significant time savings have been achieved due to the high performance of the ANAFI Ai image:
- 48MP allows the drone to fly more than 1.5 times higher than drones with 20MP 1-inch sensors, while achieving the same GSD. In other words, higher altitude and faster mission go hand in hand.
- 1 fps photography: ANAFI Ai shoots twice as fast as Autel EVO 2 and DJI Phantom 4 Pro V2.0.
4G in-flight transfer to PIX4Dcloud
In the process of creating a digital model from aerial photographs of a drone, transferring files and processing photos are two time consuming tasks. ANAFI Ai helps users speed up their workflow. In particular, the drone system allows:
- Transfer images to secure servers directly in flight using the drone's 4G connection.
- Immediately start calculating objects at the end of the flight: orthomosaics, point cloud, elevation models and textured mesh.
- Easily share 2D maps and survey quality 3D models with employees and customers.
![]()
PIX4D Suite Compatibility
ANAFI Ai is now fully compatible with a unique suite of mobile, desktop and cloud photogrammetry applications consisting of:
Photogrammetry or lidar
Why choose photogrammetry for surveying and inspection? In addition to accessibility and ease of use, aerial photogrammetry is the best choice when visual interpretation of data is required.
Photogrammetry pros
- Provides multiple visualizations: orthomosaic, color point cloud, textured mesh.
- Creates a cloud of points with a higher density, each of which contains a significant amount of information (height, texture, color).
- Surpasses LIDAR in accuracy of photorealistic 2D and 3D renderings - LIDAR does not provide a high level of contextual detail.
LIDAR cons
- Costs 100 times more than a UAV with an RGB matrix.
- The complexity of data processing and possible interpretation errors.
- Adding color information is possible, but it complicates the process.
- LIDAR generates point cloud only and is intended for specific cases and situations.
SDK
The Parrot Software Development Kit is an open source set of tools and software for developers. Since the creation of the first drone A. R. Drone, the company's open source software underpins developer platforms and tools, and Parrot
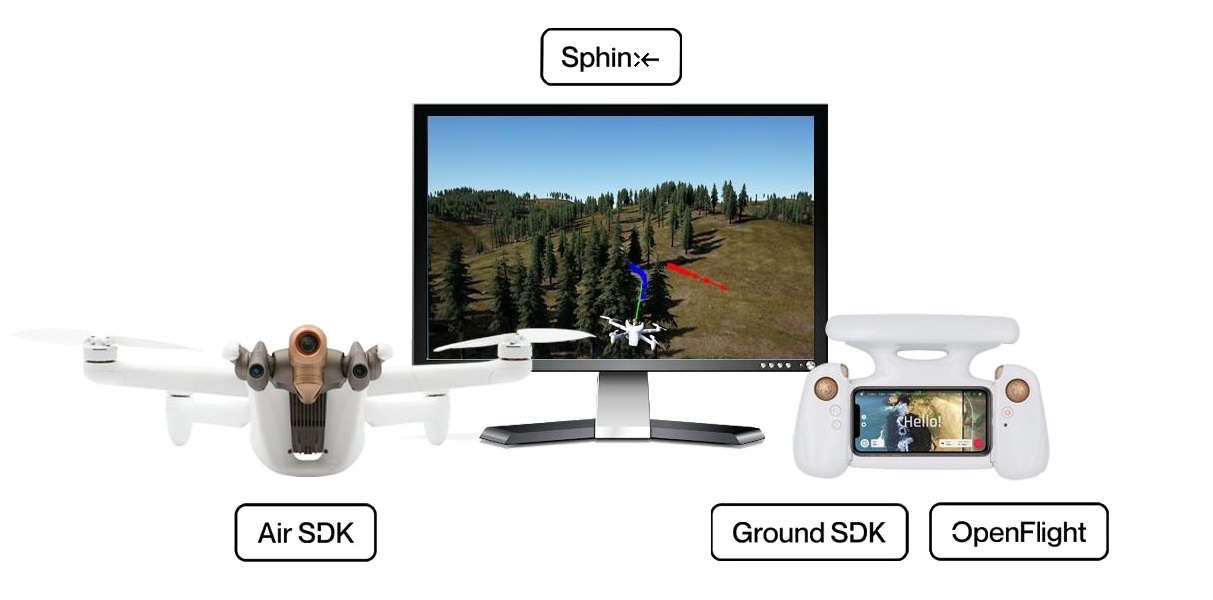
The developer clarifies that all SDK resources of the company are available free of charge, without registration and tracking, on the portal " Parrot Developer Portal"... You can also join the thousands of developers on the Parrot forum where you can discuss current topics directly with the company's engineers.
Air SDK
Run your code on ANAFI Ai
Air SDK provides a revolutionary technology architecture to download and run code directly at ANAFI Ai. Developers can program custom designed flight missions with access to all drone sensors, connection interfaces and autopilot functions.
Air SDK provides onboard access to:
- All sensors (IMU, GPS, TOF) and flight modes
- Video stream and metadata with all cameras
- Communication interfaces Wi-Fi, 4G, USB
- Depth maps and filling grids
- Creation of obstacle avoidance trajectory
Any developer can:
- Change the state of the drone by creating flight missions
- Change the navigation mode
- Add embedded Linux processes (for example, transfer data over 4G channel or use computer vision)
The Air SDK supports the C or Python programming language. Air SDK comes with detailed installation guide and API documentation. Many application examples illustrate all the possibilities offered by its unique architecture.
Ground SDK
Build a Powerful Mobile App
The Ground SDK is a Ground Control Station (GCS) software platform for mobile devices (both iOS and Android are supported). It allows any developer to create a mobile application for ANAFI Ai for subsequent control of the drone directly from a mobile device. All BVS functions (control, video, settings) are available through an easy-to-use and fully documented API.
OpenFlight
Open Source Ground Control Station
For the first time, Parrot opens the source code for its ground control station application. OpenFlight is the core of our famous open source FreeFlight 7 app. This allows the developer to focus on adding their own functionality and immediately have a professional-looking app ready to publish to the AppStore.

OpenFlight contains:
- All UX FreeFlight 7
- All interface settings
- Code for real-time 3D visualization of obstacles
- Code for managing 4G communications
- OpenFlight is published under a BSD-3 license with a complete installation guide and comprehensive documentation.
Sphinx
3D Photorealistic Simulation
Parrot Sphinx is an advanced drone simulation tool. Parrot engineers use it to develop and test all ANAFI Ai features. The general concept is to simulate the real firmware of the drone with all its sensors in a visually and physically realistic environment.

Parrot Sphinx allows:
- Simulate all cameras and sensors
- Simulate depth maps and segmentation images
- Navigate many realistic 3D scenes
- Connect to different types of remote controls
- Use scripts to control the simulation
- Add pedestrians and vehicles
- Visualize and record flight data
- Adjust aircraft sensors and surrounding physical elements
- Control real time factor
Parrot Sphinx is built on the basis of advanced standard components:
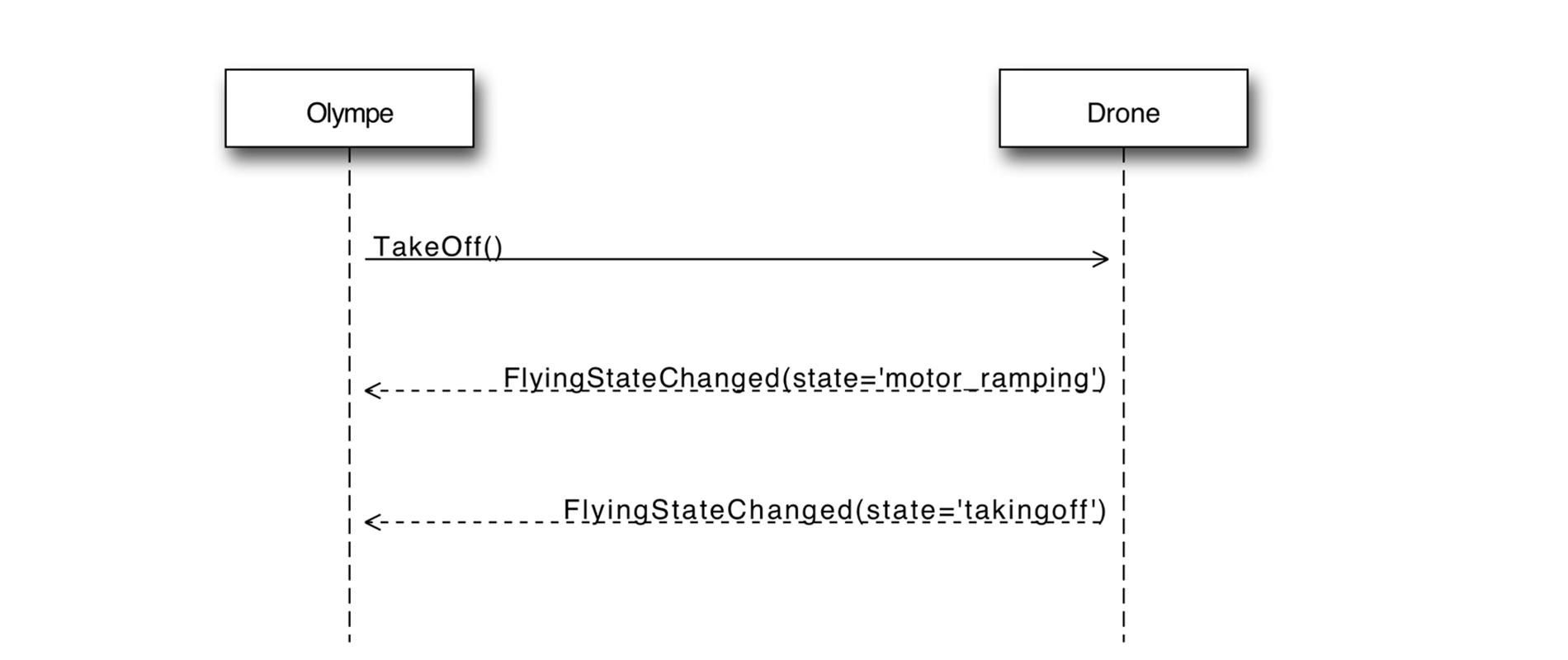
Olympe
Python to control ANAFI Ai
Olympe provides a Python controller programming interface for ANAFI Ai. Olympe's original purpose was to interact with the Sphinx modeling environment. Olympe can also control a physical ANAFI Ai from a remote computer.
Olympe framework allows:
- Connect to simulated or physical ANAFI Ai
- Send command messages (piloting, camera orientation, Return to home, Flight Plan)
- Start and stop streaming video from all cameras
- Record video stream and synchronized metadata
PdrAW
Advanced Media Player
PDrAW is an advanced video viewer for ANAFI Ai media. The viewer supports both streaming (RTP / RTSP) and recorded (MP4) video on Linux, macOS, Android and iOS platforms. PDrAW comes as a library (libpdraw), a wrapper library (libpdraw-backend), and a stand-alone executable (pdraw).
PDrAW also manages video metadata. On ANAFI Ai, both streaming and recorded video include metadata that is publicly available and documented, allowing advanced aerial video processing.
Models C. A. D.
Parrot provides 3D models of their drones for integration into your CAD design for rapid prototyping and accessory integration.
MAVLink and GUTMA compatibility
ANAFI Ai is compatible with the standard open source MAVLink v1 protocol, which allows real-time data exchange between the UAV and the control station. ANAFI Ai can be controlled manually or using automatic flight planning from a MAVLink compatible base station such as QGroundControl.
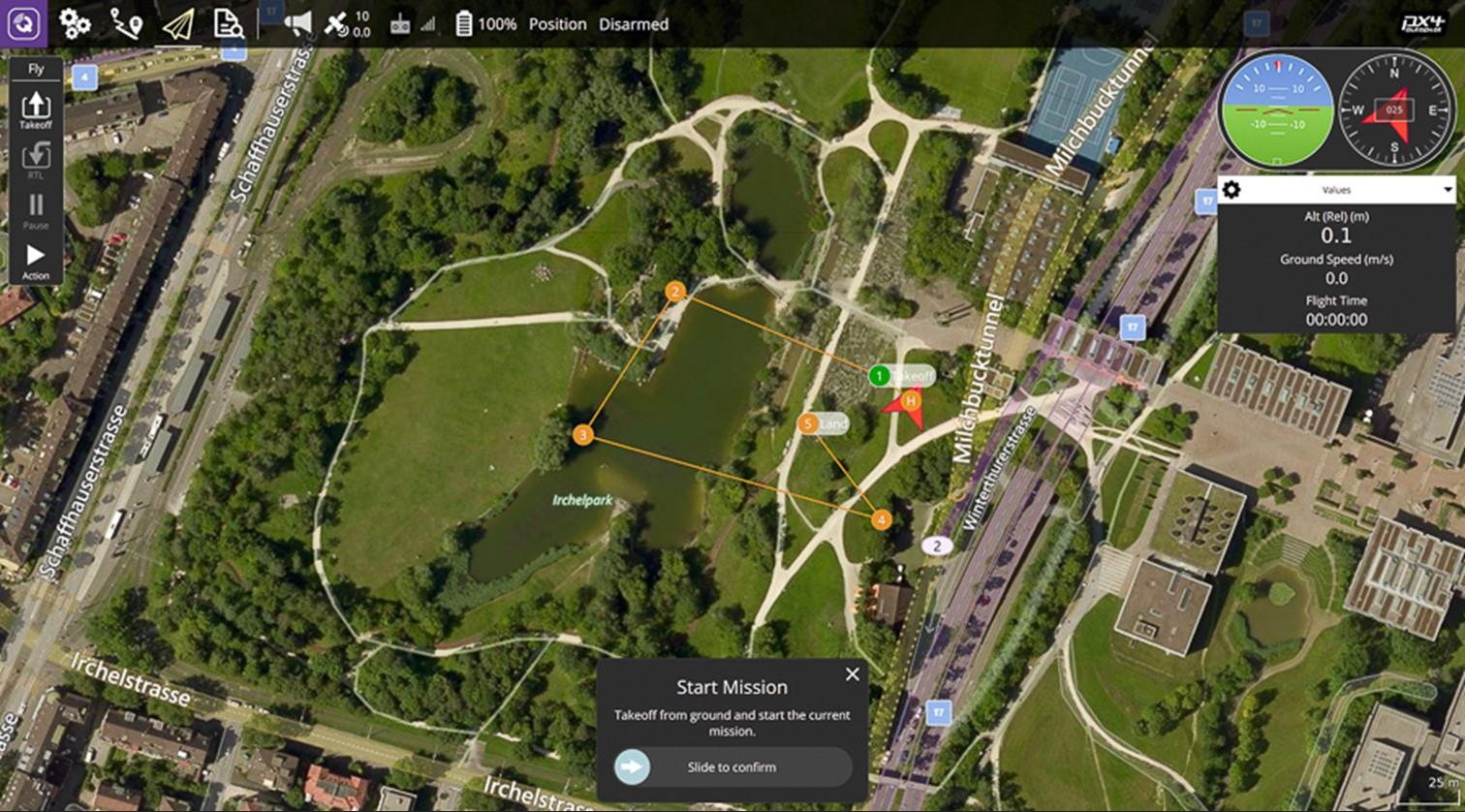
* QGroundControl interface
ANAFI Ai is compatible with the open source GUTMA standard flight data protocol. The Global UTM Association is a consortium of major players in the air traffic control field.

Largest partner ecosystem for drones Parrot
Parrot continues to expand the global ecosystem of software providers for drones through its partner SDK program. offering specialized and unique solutions for the growing and evolving needs of professional users.
Parrot for every business need
To get the most out of the inspection process, Parrot offers its customers an ecosystem of compatible drone software ranging from fleet management, compilation flight plan and import of flight logs, before shooting, mapping, monitoring and analyzing the received data.
PIX4D × Parrot
2D / 3D modeling applications. A unique set of mobile, desktop and cloud photogrammetry applications.
Verizon x Skyward x Parrot
4G LTE drone solution in the United States. The first of its kind ANAFI Ai robotic drone connected to the Verizon 4G LTE network with pre-installed Skyward software. Opens the way for near real-time data transfer, remote deployment and out-of-line-of-sight flights.

Skyward × Parrot
Integration and learning within ANAFI capacity. Aviation management platform including airspace, LAANC access, and training, equipment and connectivity for enterprise drone fleet deployment.

DroneSense × Parrot
Build, manage and scale your drone programs. Unmanned aerial vehicle professionals in the public safety sector can use the full suite of DroneSense capabilities, specially designed for the needs of first responders.

Parrot Ecosystem Partners

Parrot Affiliate Program
The developer proposes to expand the capabilities of his program for drones by integrating their SDK.
Cybersecurity
Data confidentiality
The developer notes that he does not collect any data without the consent of users. The decision of whether to transfer data to the Parrot infrastructure or not rests solely with the users themselves. The data hosted in Parrot allows the user to synchronize flight data and flight plans between different devices, as well as facilitate support and enable Parrot to improve its products.
ANAFI Ai complies with the General Data Protection Regulation of the European Union (GDPR) and goes further, for example, allows you to delete all data in 1 click, thereby providing users with the easiest control. This one-click issue is resolved in the FreeFlight7 mobile application or in the privacy settings of the Parrot. Cloud account. Thus, users at any time can not only stop exchanging data, but also easily request their deletion.
If the user consents to the exchange of data, their processing will be carried out in a completely transparent format, described in detail in the Parrot Privacy Policy.
When ANAFI Ai is connected to Skycontroller 4 via 4G, Parrot infrastructure is used to pair the drone and remote controller. If the user is not logged into a Parrot. Cloud account, he can still use a 4G connection with a unique temporary account. When using the Parrot infrastructure for 4G pairing, the video is encrypted using a key agreed between the drone and the remote control, Parrot does not have access to unencrypted video.

FIPS140-2 compliant and CC EAL5 Secure Element
ANAFI Ai has a built-in Wisekey security element that is NIST compliant FIPS140-2 Level 3 and Common Criteria EAL5 certified. A similar security element is also built into the Skycontroller 4.
Security element functions:
- Performs cryptographic operations
- Stores and protects confidential information
It uses a personal ECDSA key with domain parameters P521, which is unique for each drone. It cannot be extracted from the security element. And the certificate associated with this key is signed by a certification authority.
Wisekey protects the integrity of the firmware, provides unique drone identification for 4G pairing and strong authentication, and unique digital signature of photos taken by the drone.

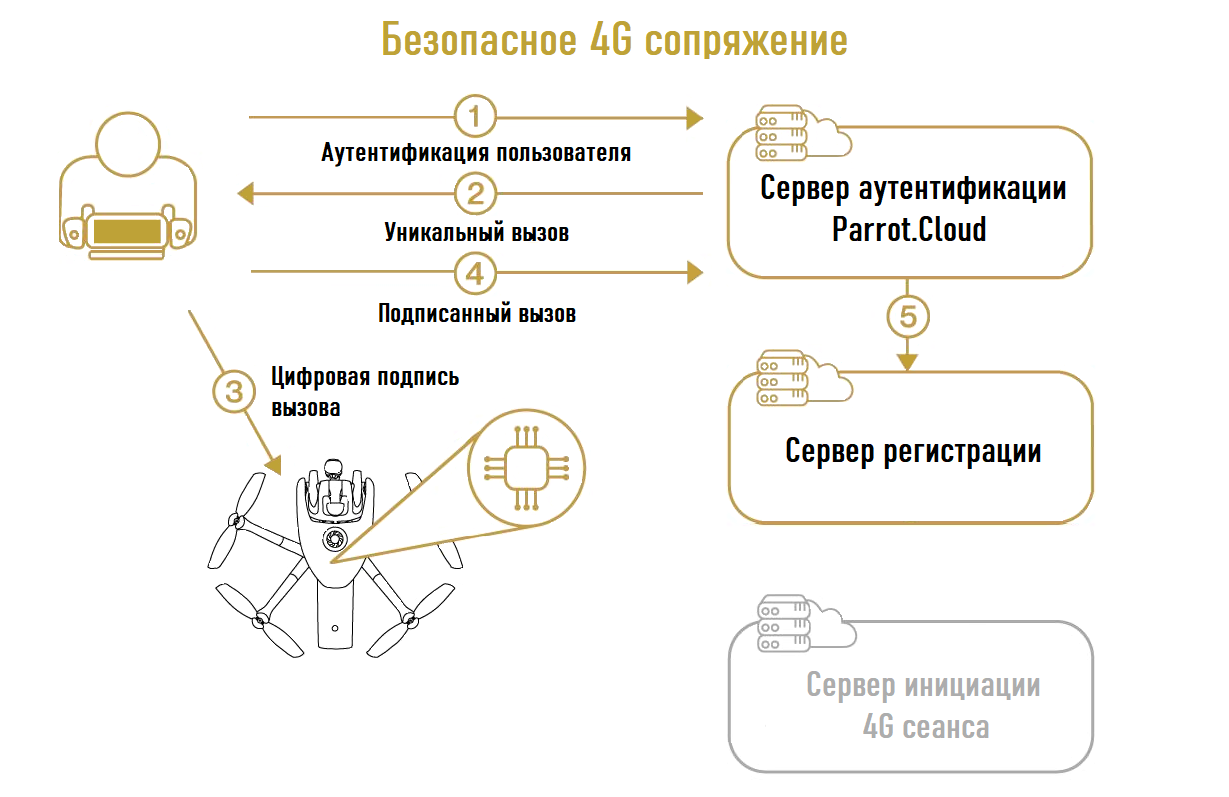
4G secure connection and strong authentication
the process of safely pairing devices. During this process, the user reliably confirms that he is connected to a specific drone. Thanks to ANAFI Ai Secure Element, he can do this without entering a password inside the drone.
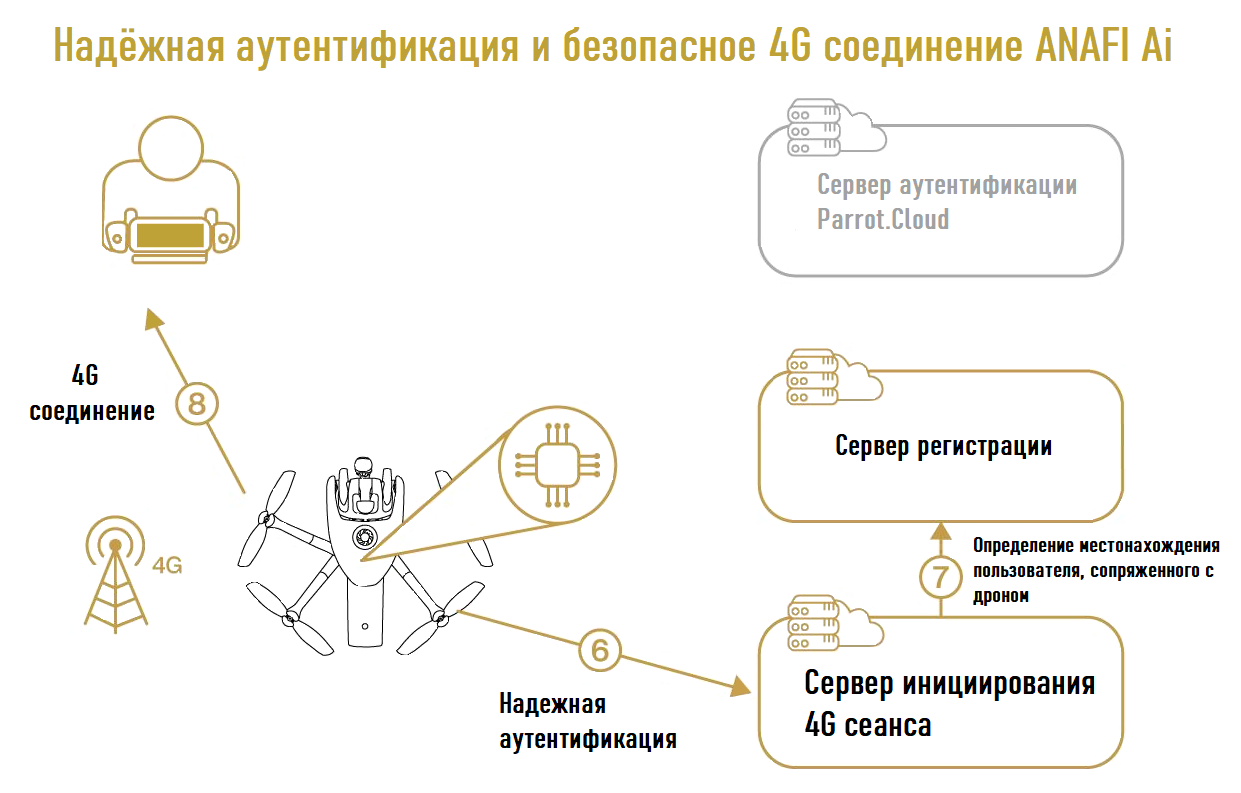
The Parrot servers then register the communication between the user and the drone. When Wi-Fi connection between the user and the drone is lost, ANAFI Ai will automatically switch to 4G connection. ANAFI Ai performs strong authentication on Parrot servers using its private key stored on the Secure Element. Parrot servers look for connected users and provide interface between ANAFI Ai and Skycontroller 4.
To protect drone control and video streams coming to Skycontroller 4, ANAFI Ai supports TLS, DTLS and SRTP protocols.
Safe initialization and upgrade
The aircraft boot sequence is protected: the system verifies that it uses Parrot software and that this software has not been tampered with. A security check is performed on every initialization. The update service also controls the digital signature of software updates.
Setting up user keys on the Secure Element
ANAFI Ai users have access to a special operator account Secure Element. This account is used to set up keys that are relevant to this user. Users can configure the Secure Element with the public keys of the mission providers they trust. ANAFI Ai will only perform missions that are signed with these keys. This process prevents attackers from performing malicious flight missions on the drone.
Digitally Signed Photos
Secure Element from ANAFI Ai can digitally sign drone images. This signature is proof that:
- Said signed image was taken by the indicated unmanned aerial vehicle.
- Neither the image itself nor its metadata has been processed (voluntarily or not) - the metadata, also known as EXIF and XMP, contains information about the date, time and location of the image.

In other words, the digital signature protects all data related to the image, including the place and time when it was captured and which ANAFI Ai drone.
Users as well as partners offering software solutions using drone photography can verify the digital signature of ANAFI Ai photos either with the drone certificate or through the public key catalog provided by Parrot.
Transparency and ongoing security checks with Bug bounty
Parrot uses standard protocols and file formats whenever possible. There is no obfuscated code or hidden features. This allows the user to understand how Parrot products work and to test their safety. In addition, OpenFlight, the software used to control the drone, is open source, giving users complete control.
In April 2021, Parrot launched the Bug Bounty Program with YesWeHack, Europe's first crowdsourced security platform. Through this partnership, Parrot leverages YesWeHack's vast cybersecurity research community to identify potential vulnerabilities in its drones, mobile apps and web services.
The Bug Bounty Program consists of two phases:
Private Programs initially provide exclusive access to select security researchers and include future Parrot drone models. The experience and diverse skills of the researchers will confirm the high level of security of the products before they go to market, which will help to improve the safety of Parrot users and the protection of their data.
After this first round of the private Bug Bounty program and after commercialization, the products go into the public program. Their security is then rigorously vetted by the entire YesWeHack community of over 22,000 cybersecurity researchers.

Data Management
Parrot Cloud allows users who choose to share their data to manage flight and fleet data and multimedia data received by their drones.
Collected data
Parrot Cloud collects 4 types of data:
Static (product data):
- Aircraft serial number
- Battery serial number
- Aircraft and battery firmware version
- Aircraft and battery hardware version
- Device model
- FreeFlight 7 Release Version
Events
- Alerts: Battery, Autopilot, Sensors
- Communication: connect / disconnect, start streaming, interference alert, weak signal
- Camera: streaming statistics, setting changes
- Flight: change of state (takeoff, landing, hovering, etc.), activation of a flight task (flight plan, photogrammetry)
"Contextual images"
- Timelapse- snapshot and (once every 2 minutes)
- Deep Learning (mapping more objects, landscapes to improve flight autonomy, tracking, obstacle avoidance)
- Stereovision (depth map)
- Images triggered by event
- Start and end of precise hover statements, precise landing
- Drone crash
- Faces are automatically blurred during transmission
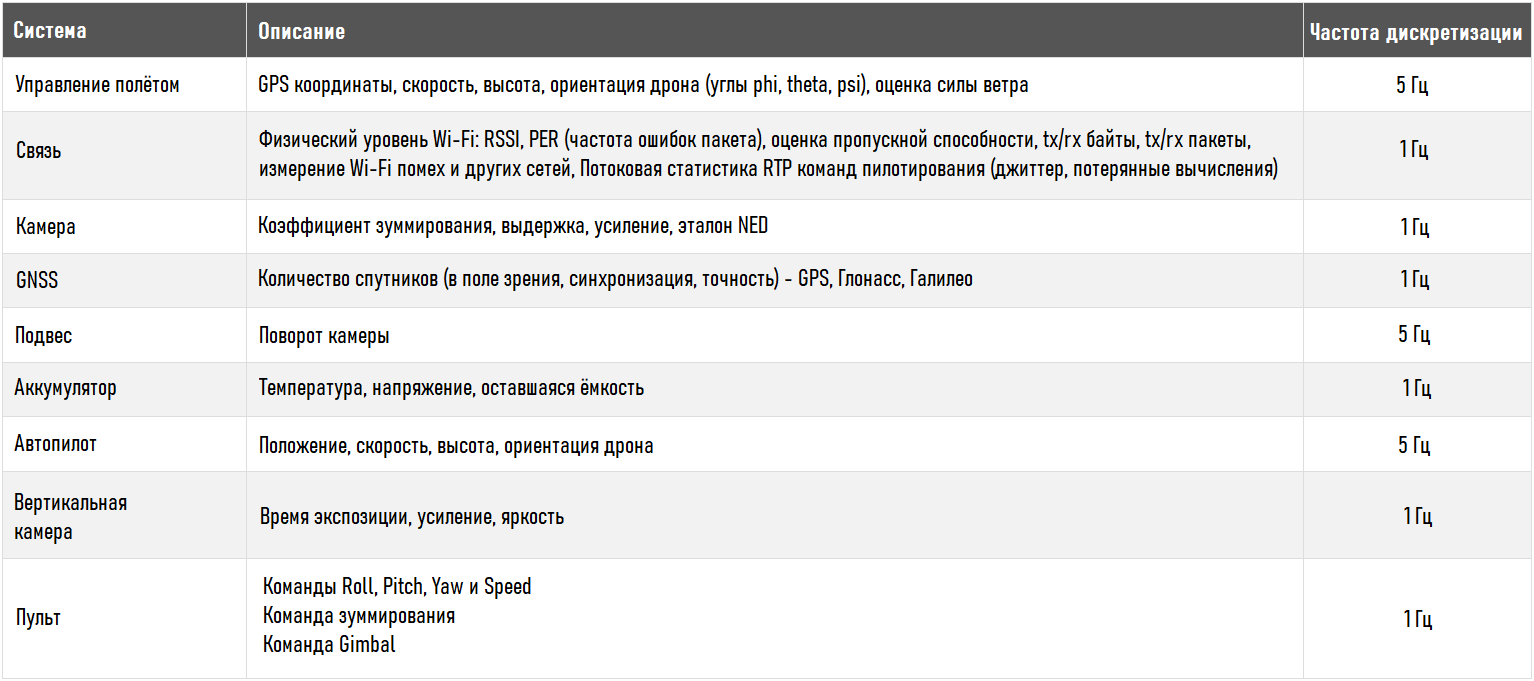
Telemetry
Final use of collected data
Parrot only collects and uses data from customers who have agreed to share it in order to improve the quality of its products...
Maintenance Management
Preventive Maintenance: Our tools collect all information related to missions (mission type, takeoff and landing times, number of missions, drone location, flight speed, flight plan and AirSDK settings). This allows you to receive accurate information about the status of the ANAFI Ai drones fleet (as well as their controllers and batteries) in real time.
Corrective Maintenance: The collected information is useful for quickly determining the status of a particular drone or battery.
Enhancing Artificial Intelligence (AI)
The AI elements of ANAFI Ai (PeleeNet, convolutional networks, etc.) offer users unrivaled services and features: obstacle avoidance, target tracking, several flight modes. The quality of AI depends on the quantity and quality of the collected data (images and videos): this data feeds machine learning. In this respect, data quality is not the only decisive element: the metadata associated with this data is also fundamental. For this reason, our tool collects images and metadata on a regular basis and depending on events, for a total of 30 to 50 MB per minute.
Flight characteristics
Aerodynamic characteristics
Drives and aerodynamics
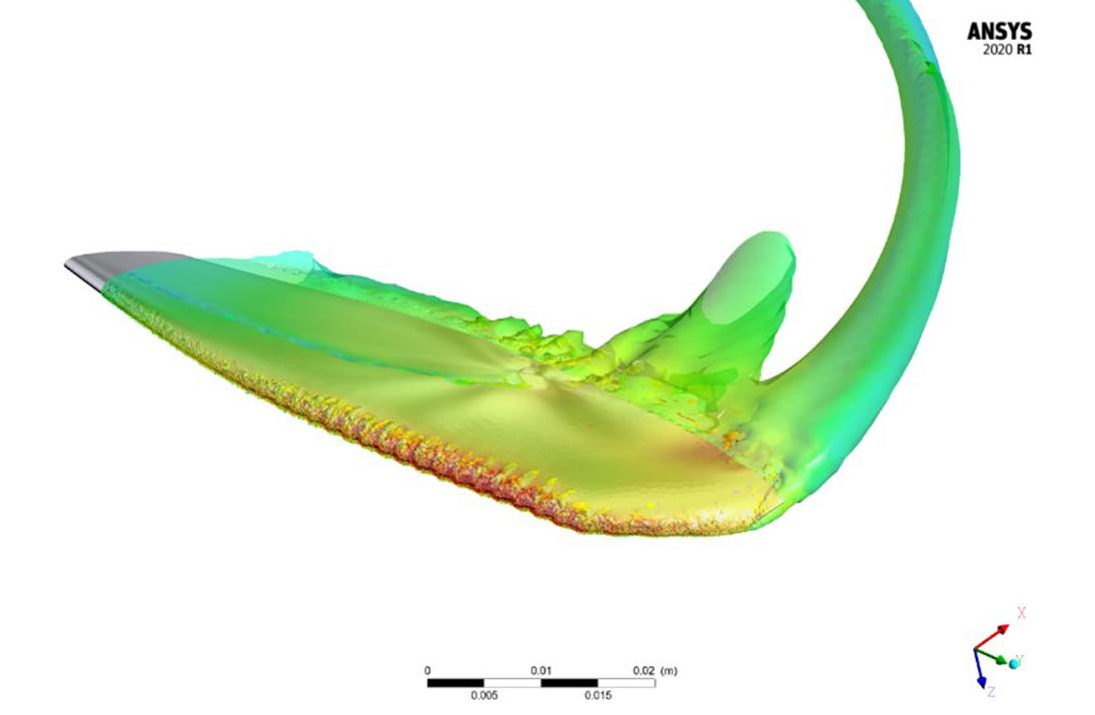 CFD Image of ANAFI Ai Propeller Blades
CFD Image of ANAFI Ai Propeller Blades
New biomimicry propeller blades with a humpback-like leading edge whales. This approach made it possible to increase the propulsive efficiency of the power plant, which at the output provided an increase in thrust at the same rotational speed. This effect is comparable to an increase in the rotor diameter.
Acoustic noise, especially tonal noise, emanating from the leading edge is also reduced. Therefore ANAFI Ai is quieter [71.5 dB SPL (A) at 1 m] than Skydio 2 [76.4 dB SPL (A) at 1 m].
- Flight time more than 32 minutes
- Thanks to the optimized aerodynamic characteristics of the fuselage and the ANAFI Ai propulsion system, the maximum forward flight speed is 61 km / h, with side flight and reverse flight 58 km / h
- Max. wind resistance 12.7 m / s.
- Thanks to the high torque efficiency of the motor / propeller and high battery autonomy, the range is 22.5 km (at a constant speed of 50 km / h in calm weather).
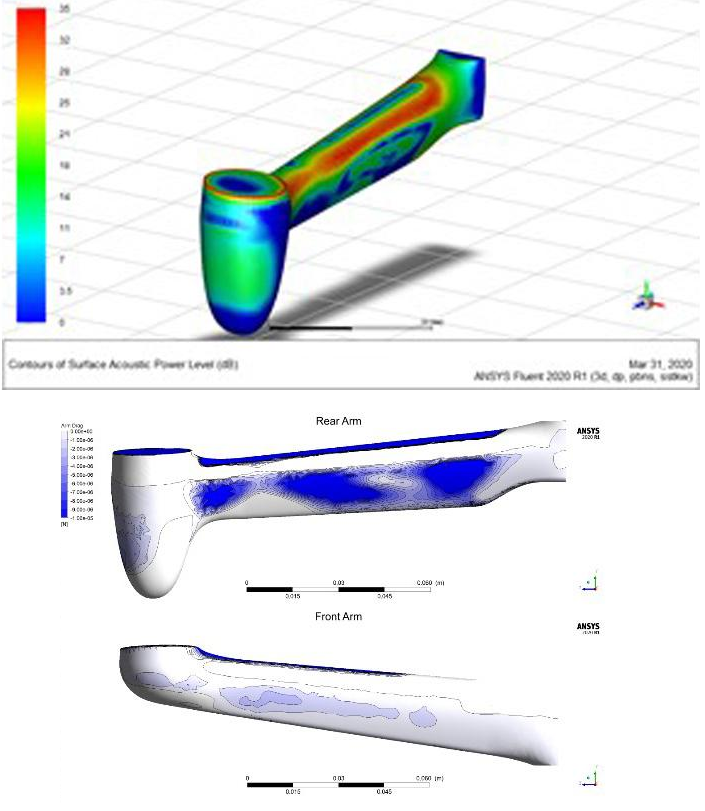 CFD images of ANAFI Ai beams
CFD images of ANAFI Ai beams
Sensors
To ensure safe flight ANAFI Ai is equipped with:
- 2 × IMU (ICM-40609-D and ICM42605)
- Magnetometer LIS2MDL
- GPS module UBX-M8030
- TI OPT3101 time-of-flight (ToF)
- Barometer LPS22HB
- Vertical camera
Sensor characteristics
Flight IMU: ICM-40609-D
- 3-axis gyroscope
- Range: ± 2000 ° / s
- Resolution: 16.4 LSB / ° / s
- Offset / Accuracy: ± 0.05 ° / s (after thermal and dynamic calibration)
- 3-Axis Accelerometer
- Range: ± 16g
- Resolution: 2.048 LSB / mg
- Offset / accuracy: ± 0.5 mg (XY) ± 1 mg (Z) (after thermal and dynamic calibration)
- Temperature control s: controlled heating system in relation to the ambient temperature, stabilized within: ± 0.15 ° C
- Measuring frequency: 2 kHz
Magnetometer: LIS2MDL
- Range: ± 49.152G
- Resolution: 1.5 mG
- Offset / Accuracy: ± 15 mG (after compensation, at maximum motor speed)
- Measuring frequency: 100 Hz
Barometer: LPS22HB 1
- Range: 260 to 1260 hPa
- Resolution: 0.0002 hPa
- Offset / accuracy: ± 0.1 hPa
- Temperature control: controlled heating system in relation to the ambient temperature, stabilized within: ± 0.2 ° C
- Measuring frequency: 75 Hz
- Measurement noise: 20 cm RMS
GNSS: UBX-M8030 1
- Ceramic patch antenna 25 × 25 × 4 mm, allowing 2 dB gain improvement over ANAFI 1
- Sensitivity: cold start -148 dBm / tracking and navigation: -167 dBm
- Time-To-First-Fix: 40 seconds
- Accuracy / Accuracy: Position (standard deviation 1.4 m), Velocity (standard deviation 0.5 m / s)
Vertical camera
- Sensor format: 1/6 inch
- Resolution: 640 × 480 pixels
- Global shutter sensor
- Black and white
- FOV: Horizontal angle of view: 53.7 ° / vertical angle of view: 41.5 °
- Focal length: 2.8 mm
- Measuring the optical flow velocity on the ground at 60 Hz
- 15Hz & precision fit @ 5Hz
ToF: TI OPT3101
- Range: 0-15m
- Resolution: 0.3 mm
- Accuracy b: ± 2 cm (after calibration)
- Measurement frequency: 64 Hz
Vertical camera IMU: ICM-42605
- 3-axis gyroscope
- Range: ± 2000 ° / s
- Resolution: 16.4 LSB / ° / s
- Offset / Accuracy: ± 0.1 ° / s (after dynamic Calibration)
- 3-Axis Accelerometer
- Range: ± 16g
- Resolution: 2.048 LSB / mg
- Offset / Accuracy: ± 2.0 mg (XY) ± 5.0 mg (Z) - after dynamic calibration
- Measurement frequency: 1 kHz
- Hardware synchronization with vertical camera, accuracy: 1 μs
Autopilot
The ANAFI Ai Flight Controller provides simple and intuitive piloting: no training is required to operate it. It allows you to automate many flight modes (Flight Plan, Cameraman, Hand take-off, Smart RTH). Sensor fusion algorithms combine data from all sensors to estimate the ANAFI Ai ratio, altitude, position and velocity.
Condition assessment is essential for the proper functioning of drones. Quadcopters are inherently unstable when the flight controller is used with an open loop; to control them easily, not to mention autonomous control, it is necessary to stabilize them using closed-loop control algorithms. These algorithms compute and send the commands to the motors required by ANAFI Ai to achieve the desired trajectories.

Indoor flight
In the absence of a GPS signal, ANAFI Ai relies primarily on vertical camera measurements to estimate speed and position. The vertical camera performance is determined by two main algorithms:
- Optical flow for speed estimation
- Key point detection and matching for position estimation
Vertical camera algorithms can work in low light conditions thanks to the ANAFI Ai equipped with a pair of LED lights located next to the vertical camera. They allow the drone to remain stable, especially when flying indoors or in the absence of GPS, at an altitude of less than 5m above the ground. The power of the LED lights adapts automatically, depending on the needs of the algorithm.
Autonomous flight
Key features
- Rotary sensing system with wide field of view
- Extraction of the depth of the surrounding space based on the stereo alignment and the depth by motion
- Representation of the environment in the form of a grid of filling
- Autonomous detection and avoidance of obstacles at speeds up to 29 km / h
This chapter details the sensors, hardware and algorithms used by ANAFI Ai to enable autonomous flight. It is organized as follows:
- A detailed description of the ANAFI Ai perception system
- Perceptual algorithms used to reconstruct the 3D environment surrounding the drones
- Rescheduling and obstacle avoidance

Perception system strategy
The perception of the three-dimensional environment is a key ability to achieve autonomous flight, especially in confined spaces. It is a prerequisite for guaranteed detection and avoidance of obstacles, which reduces the burden on the drone operator, increases mission success and ensures the safety of the aircraft.
Unleashing the full potential of a flying camera, which can freely move and rotate in all directions without restriction, requires an effective sensing solution. In particular, the sensing system should be able to receive information about the environment in directions that correspond to the forward motion in flight - regardless of the orientation of the camera.
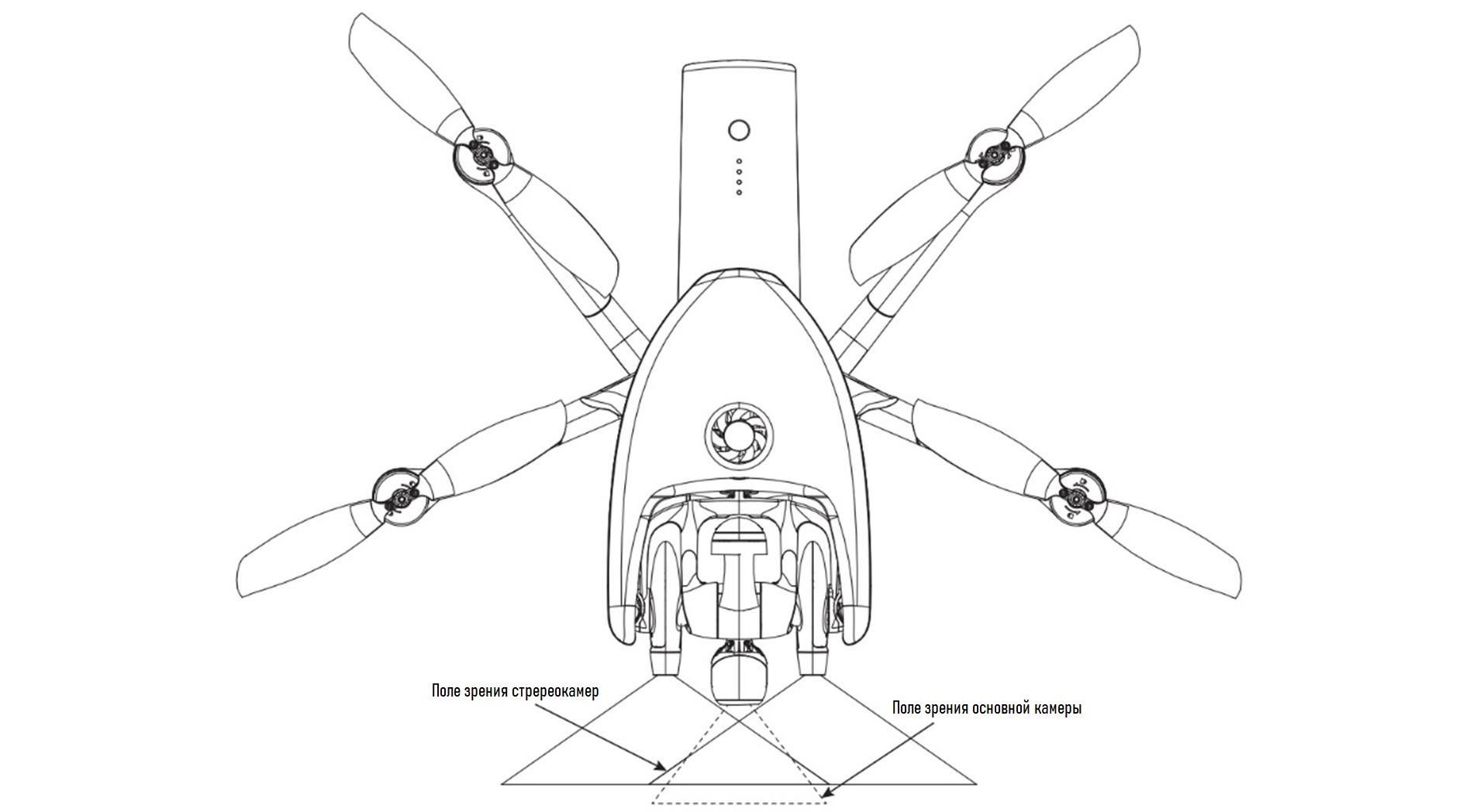
ANAFI Ai relies on a unique technical solution based on two mechanical gimbals to separate the orientation of the main camera and the sensing system:
- The main camera is mounted on a 3-axis gimbal, making it 3D orientation independent of the orientation of the drone.
- The sensing system is mounted on a single-axis gimbal - connected to the yaw motion of the drone, it can be oriented in any direction.
 ANAFI Ai dual stabilizer for perception and visualization.
ANAFI Ai dual stabilizer for perception and visualization.
The tilt axes of the two hangers are collinear and combined to achieve an ultra-compact design.
Thanks to this solution, it is possible to direct the main camera and the sensing system in two different directions. This design avoids the use of expensive cameras on the sides, top, bottom and rear of the drone while still providing a large available field of view for the sensing system.
This section is organized as follows:
- Details of the sensors used for the sensing system
- Specifications for both the main camera gimbal and the sensing system gimbal
- Strategies for targeting the sensing system to exploit the potential of the dual suspension structure
Sensors
The sensing system is based on a pair of identical cameras with one pitch axis...
 1-axis mechanical hinge for ANAFI Ai sensing system.
1-axis mechanical hinge for ANAFI Ai sensing system.
Sensor specifications are as follows:
- Model: Onsemi AR0144CSSM28SUD20
- Color: Monochrome
- Resolution: 1280 × 800 pixels
- Frame rate: 30 fps
- Global shutter
- Full horizontal field of view: 118 ° (110 ° usable for perception)
- Full vertical field of view: 72 ° (62 ° usable for sensing)
- Focal length: 1.47 mm (0.039 inches - 492.94610 pixels)
- Aperture: f / 2.7
Specifications The stereopairs are as follows:
- Common Pitch Axis
- Baseline / Distance: 62 mm (2.44 inches)
- Synchronous capture at 30 fps

Dual Gimbal
The mechanical gimbal of the main camera is a 3-axis mechanical pitch-rol l-yaw "with the following characteristics:
- Pitch Limiters: -116 ° / 176 °
- Roll Limiters: / - 36 °
- Yaw Limiters: / - 48 °
The mechanical suspension of the sensing system is a single axis suspension with the following characteristics:
- End stops in pitch: -107 ° / 204 °
- Travel time from one end stop to the other: 300 ms
The sensing system has 311 ° travel (of which 296 ° is not masked by the drone's body), which allows for backward perception.
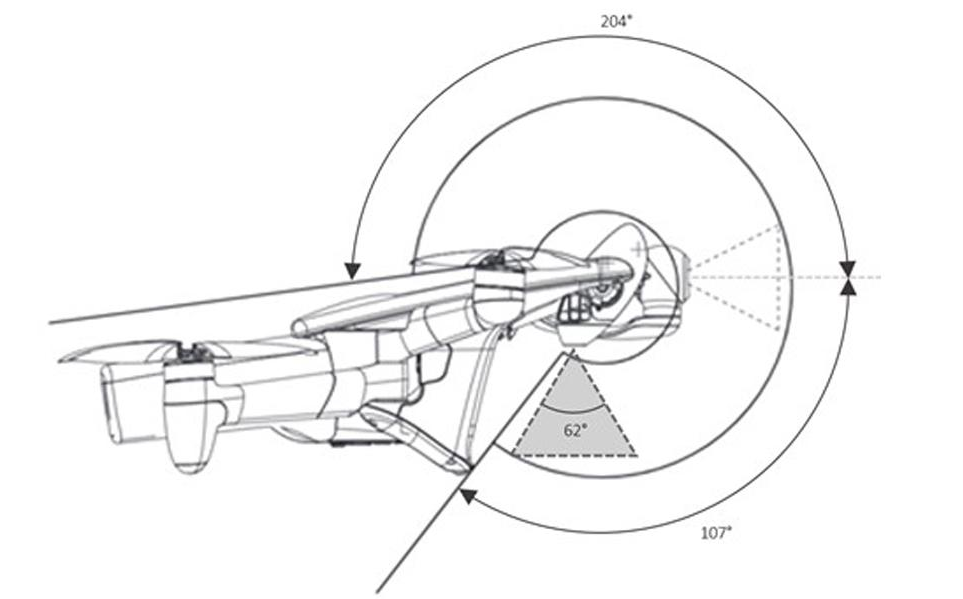
Instantaneous vertical field of view and limiting systems of perception ANAFI Ai.
The system was designed in such a way that:
- The propeller blades do not enter the field of view of the main camera
- The main camera does not cover the field of view of the perception system
- The main camera and sensing system can be fully folded back to protect the lenses
 The horizontal field of view of the ANAFI Ai perception system.
The horizontal field of view of the ANAFI Ai perception system.
When leaning back, the perception system moves to the uppermost position, thereby providing a clear view.
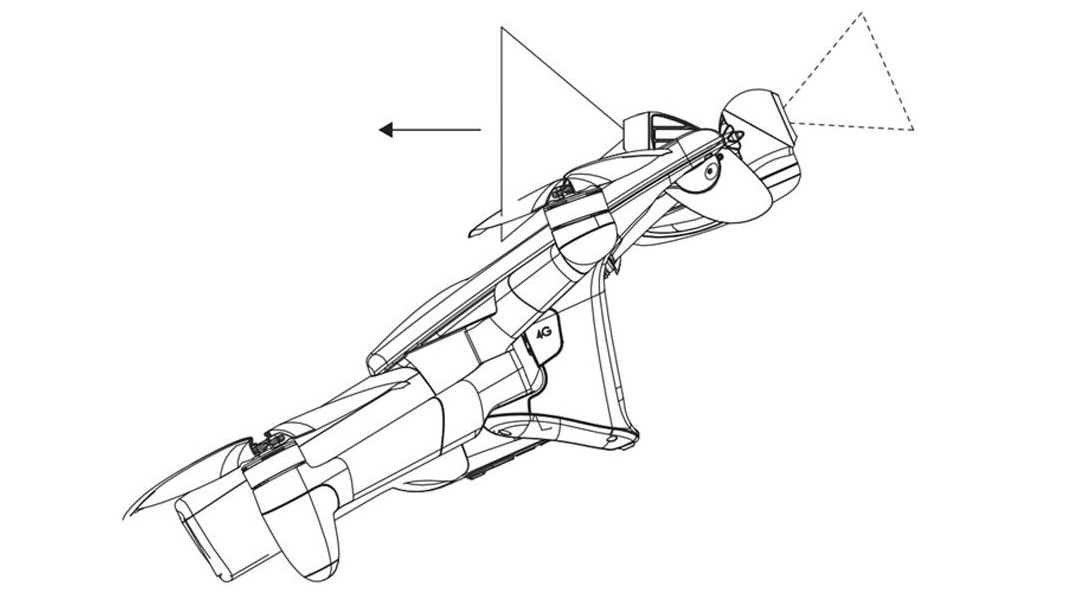
Perception of ANAFI Ai in fully reclined position for backward flight.
Reconstruction of the environment
Reconstruction of the surrounding three-dimensional environment for autonomous flight is performed in two stages:
- Extracting depth information from perception in the form of depth maps
- Combining depth map data into a three-dimensional grid of filling
Two methods are used to obtain depth maps from perception sensors:
- Depth by based on stereo alignment
- Depth from motion
Depth from stereo correspondence
The main method of extracting depth information is based on parallax between two stereo cameras of the perception system. By photographing the environment in one direction, but from two different positions, objects in the field of view of the perception system appear in different positions in the images obtained by two cameras. The closer the subject, the greater the difference in position.
Thus, the strategy is to determine the points in the images obtained by the left and right stereo cameras corresponding to the same object in the field of view of the sensing system, and measuring the difference in the position of these points in the two images. This difference is called disparity and is measured in the number of pixels.
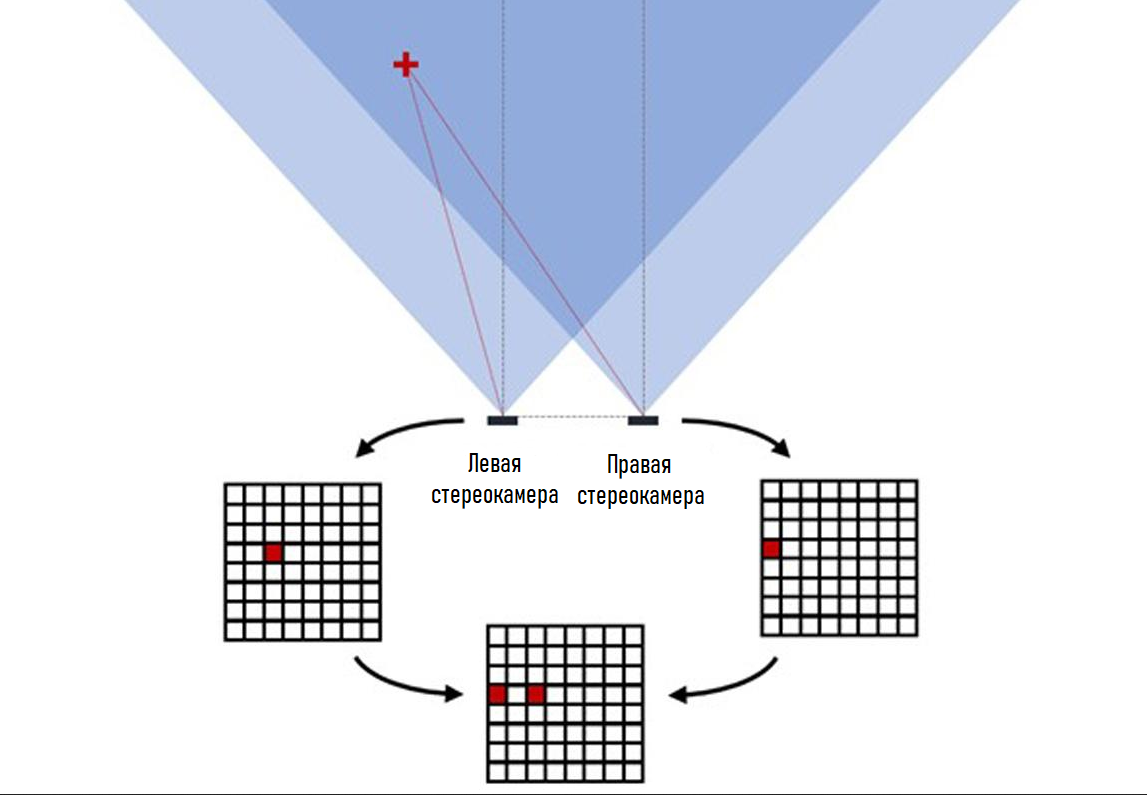 Illustration of the principle of stereo vision - the red 3D point is in different positions on the left and right images.
Illustration of the principle of stereo vision - the red 3D point is in different positions on the left and right images.
The disparity can then be related to the depth of each of these points using the following relationship depth = focal * baseline / disparity, where the depth and baseline are expressed in the same units, and the focal length and disparity are expressed in the number of pixels.
The result of the calculation takes the form of a depth map of 176 × 90 pixels, for which the value of each pixel corresponds to the depth in meters. The depth map is refreshed at 30 Hz.
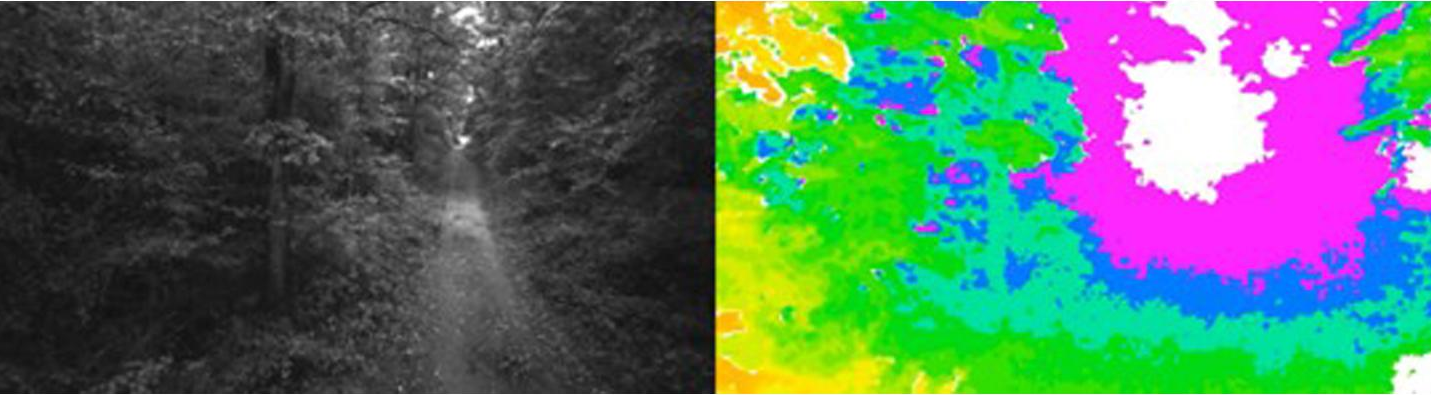
An example of an image captured by the right camera of the ANAFI Ai sensing system (left) and the corresponding depth obtained using stereo imaging (right). The color map goes from red (Closer) to purple (Farther) - white means Out of Reach.
The immediate result of this is that the depth measured by this method is discretized, since the disparity can only take discrete values (number of pixels). A 3D point located far enough from the perception system and creating a theoretical disparity of less than one pixel will be considered infinite, since the corresponding actual discrete disparity will be equal to 0. The accuracy of the stereo comparison method decreases with increasing distance, although there are methods that can reduce this phenomenon by achieving subpixel sampling.
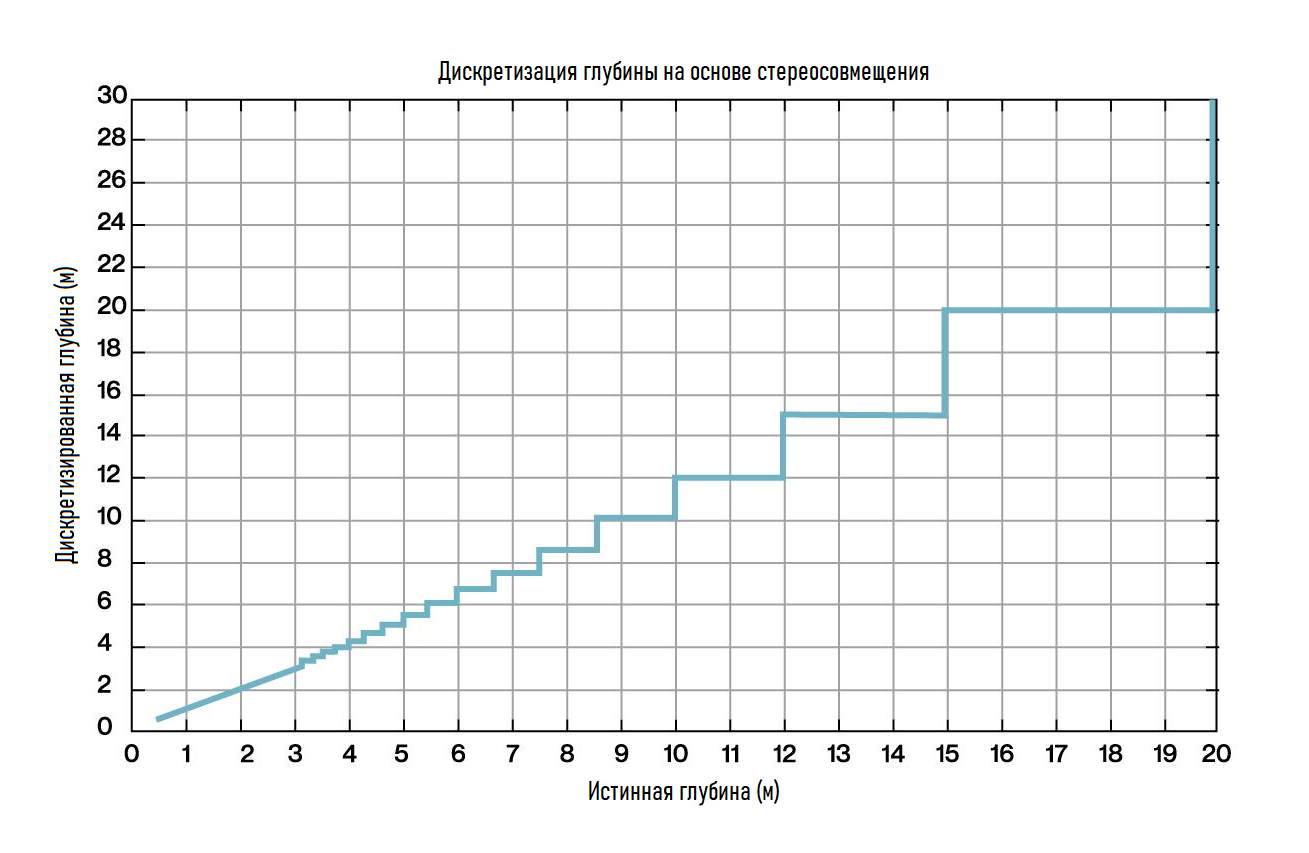 Discretized depth as measured by "stereo alignment" versus "true depth".
Discretized depth as measured by "stereo alignment" versus "true depth".
In addition, disparity diverges as depth approaches zero. Since the number of pixels in images is limited, the disparity value is also limited. As a consequence, there is a minimum depth at which the perceptual system is blind. This minimum depth is 36 cm for ANAFI Ai.
About Calibration: Each pair of stereo cameras is factory calibrated to accurately measure small discrepancies that may exist between the two cameras and compensate for them in onboard depth calculations.
The user can also recalibrate a pair of stereo cameras using the test pattern supplied with the drone. In particular, to some extent, the drone is able to detect potential calibration errors that may arise during its life. In this case, the aircraft software will try to adjust and compensate for them, and if this fails, a notification will appear asking you to recalibrate.
Depth from movement
The movement of the drone can also be used to collect images of the environment from different angles and thus reconstruct depth information. This technique is called depth from motion, or monocular sensing, because a single moving camera is sufficient to collect depth information.
The principle of operation is similar to stereo vision, but instead of comparing images of the environment obtained by different observers at the same time, perception compares images of the environment obtained by the same observer at different times. If the drone is moving, then the images from this unique observer will be captured from different angles. Knowing the position in which each frame was taken, it is possible to triangulate points corresponding to the same feature in different images and return them to 3D.
The output is a three-dimensional point cloud containing up to 500 points for ANAFI Ai, generated at a frequency of 10 Hz.
 An example of a point cloud created based on depth from motion - the color map goes from red (Closer) to purple (Farther).
An example of a point cloud created based on depth from motion - the color map goes from red (Closer) to purple (Farther).
The ANAFI Ai Motion Depth algorithm typically generates less information (sparse point cloud) than the stereo matching algorithm and requires the drone to move to collect information. In addition, this algorithm cannot extract information in the exact direction of movement (at least for live broadcasts), since objects in the images appear almost stationary in this direction (expansion focus).
However, it has a better detection range (theoretically infinite range) than stereo matching.
Fill Grid
Depth information from stereo and monocular sensing algorithms is integrated into the Fill Grid. This mesh samples the 3D environment into 3D cubes called voxels. Each voxel is assigned the probability of being occupied by an obstacle or, conversely, being free from an obstacle.
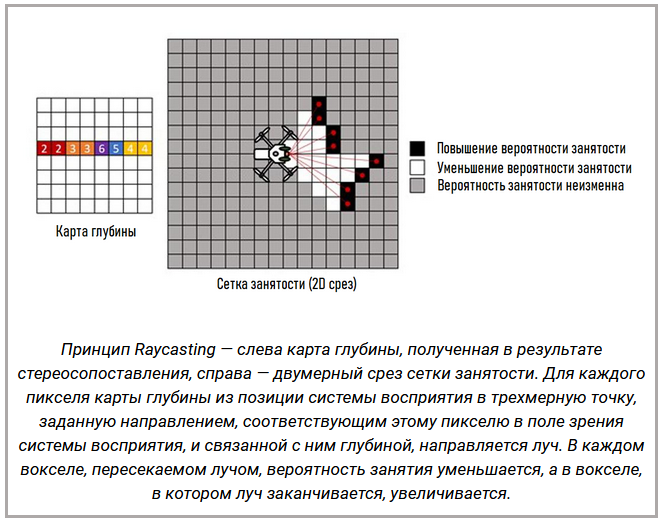
A ray transmission algorithm is used to integrate depth information into a fill grid. For each pixel of the depth map obtained as a result of stereo comparison, it is converted into a three-dimensional point, and for each point of the point cloud - into the depth obtained as a result of motion:
- A ray is drawn in the filling grid from the position of the perception system to the position of the 3D point.
- The probability of a voxel containing a 3D point being occupied is increased.
- The probability that all voxels crossed by a ray other than the one containing the 3D point are occupied is reduced.
Thus, the grid acts as a time filter for depth information, absorbing any potential noise in the depth measurement, and as a memory of previous measurements, which allows you to navigate difficult environments even in the absence of a continuous 360 ° field of view of the perception system.
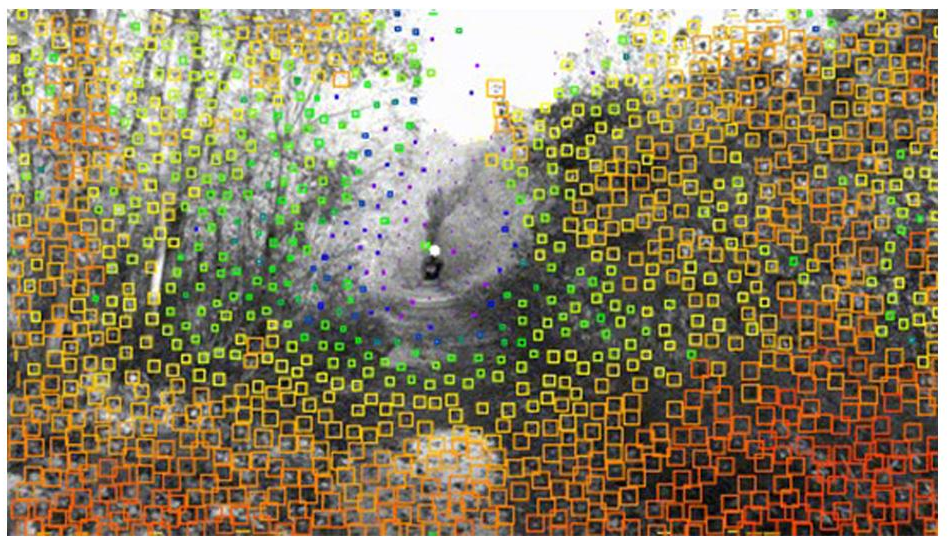
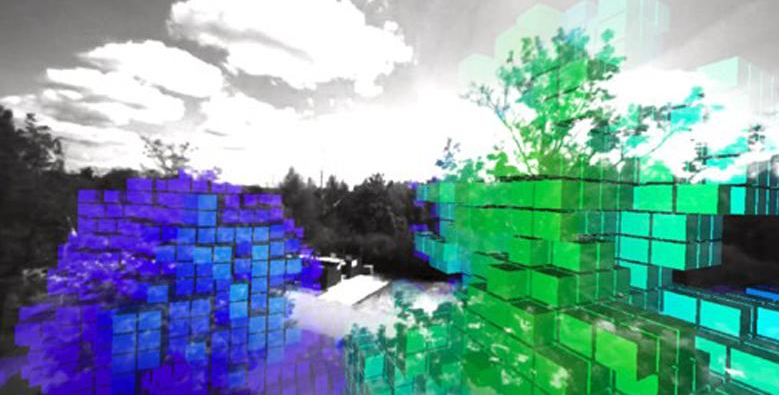 An example of a fill grid. Voxels are superimposed on the right stereo camera view with a high degree of certainty that they are busy, ranging from red (Near) to purple (Far).
An example of a fill grid. Voxels are superimposed on the right stereo camera view with a high degree of certainty that they are busy, ranging from red (Near) to purple (Far).
The infill grid is the basis for the motion planning algorithms used by ANAFI Ai for autonomous flight and obstacle avoidance.
Obstacle Avoidance
Thanks to the knowledge of the 3D environment of the drone stored in the infill grid, ANAFI Ai can avoid obstacles. This provides significant additional safety for autonomous missions, but is also useful for manual flight, especially if the line of sight between the pilot and the drone is impaired.
Every 30 ms ANAFI Ai predicts what the nominal short time horizon will be in the future. This prediction is inferred from the links submitted by the user, whether they are flight commands from the remote control, waypoints to attach to a flight plan, or an input trajectory. Then, using the simulated internal drone model, the rescheduling algorithm calculates the smallest possible corrections to this predicted nominal trajectory that make it collision-free and feasible for the drone.
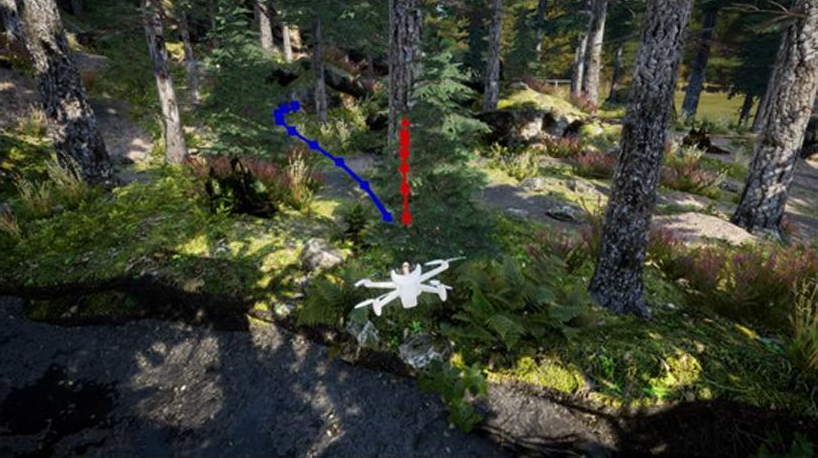 An example of the corrected trajectory computed by the obstacle avoidance algorithm in response to the collision of the reference trajectory with a tree.
An example of the corrected trajectory computed by the obstacle avoidance algorithm in response to the collision of the reference trajectory with a tree.
The ANAFI Ai obstacle avoidance system was designed to operate at speeds up to:
- Level flight: 29 km / h
- Climb: 14 km / h
- Descent: 11 km / h
Avoidance performance is limited in rain or strong wind, low light, or disrupted satellite navigation. In addition, before flying, you must make sure that the lenses of the sensing system are clean.
Flight Missions

Key Features
Air SDK (see. SDK section) allows developers to access every drone sensor, camera, connectivity interface and standalone function. Therefore, they can customize the drone's behavior to create flight missions. Each flight mission contains a set of basic behaviors or modes:
- On the ground: Behavior when the engines are stopped, eg sensor calibration.
- Takeoff: various takeoff strategies
- Hover: hold a fixed point
- Flight: manual functions and autonomous flight
- Landing: various landing strategies
- Critical: upon detection of a critical state
Custom flight missions can create new behaviors or reuse them from the default mission.
Price and availability
The start of sales of the ANAFI Ai drone is scheduled for September 2021. Price information has not been disclosed at the moment. We continue to monitor the incoming information and will definitely update this section at a later date.

Download Documentation
Developer Documentation:
- Download full technical documentation from the developer
- Download the product specification from the developer
Videos
Top reviews ANAFI Ai from the developer and users
Unpacking and first flight.
Test flight of the drone at range with 4G connection. The total flight time was 29 minutes at an average horizontal flight speed of 58 km / h (16 m / s). During this time, the drone was able to cover 27 km. You can also notice that the flight was carried out in strong wind conditions, which was constantly warned by the drone system.
.






