Contenidos
- Dron de bricolaje: Lección 1. Terminología.
- Dron de bricolaje: Lección 2. Marcos.
- Dron de bricolaje: Lección 3. Planta de energía.
- Dron de bricolaje: Lección 4. Controlador de vuelo.
- Dron de bricolaje: Lección 5. Montaje.
- Dron de bricolaje: Lección 6. Comprobación de rendimiento.
- Dron de bricolaje: Lección 7. FPV y distancia.
- Drone con tus propias manos: Lección 8. Aviones.
Introducción
Ahora que ha seleccionado todos los componentes principales para su UAV, puede comenzar a ensamblar. Esta guía cubrirá los errores comunes al ensamblar un UAV multirrotor, junto con algunos consejos útiles para el ajuste. Esta lección no cubrirá elementos como una cámara / sistema FPV, dispositivos de largo alcance u otros accesorios (lo cubriremos en la lección 7).
Componentes que debe tener en esta etapa:
- Armazón (comprado o hecho a mano)
- Motores, ESC, hélices, batería, dispositivo cargador
- Tablero / arnés de distribución de energía
- Controlador de vuelo y dispositivo de comunicación (control de radio propuesto)

Propulsión
Para lograr los objetivos de esta lección, el sistema de propulsión de su UAV incluirá los siguientes componentes:
- Motores
- ESC
- Distribución de energía (tablero o arnés)
- Batería
- Controlador de vuelo
Tenga en cuenta que las hélices no están en la lista. ¡No instale hélices en esta etapa! Los tornillos principales se conectarán solo en la sexta lección. Dado que este es su primer dron, recomendamos realizar una conexión eléctrica "sin marco" antes de instalar todo en el marco; para verificar todas las conexiones y eliminar las fallas identificadas.
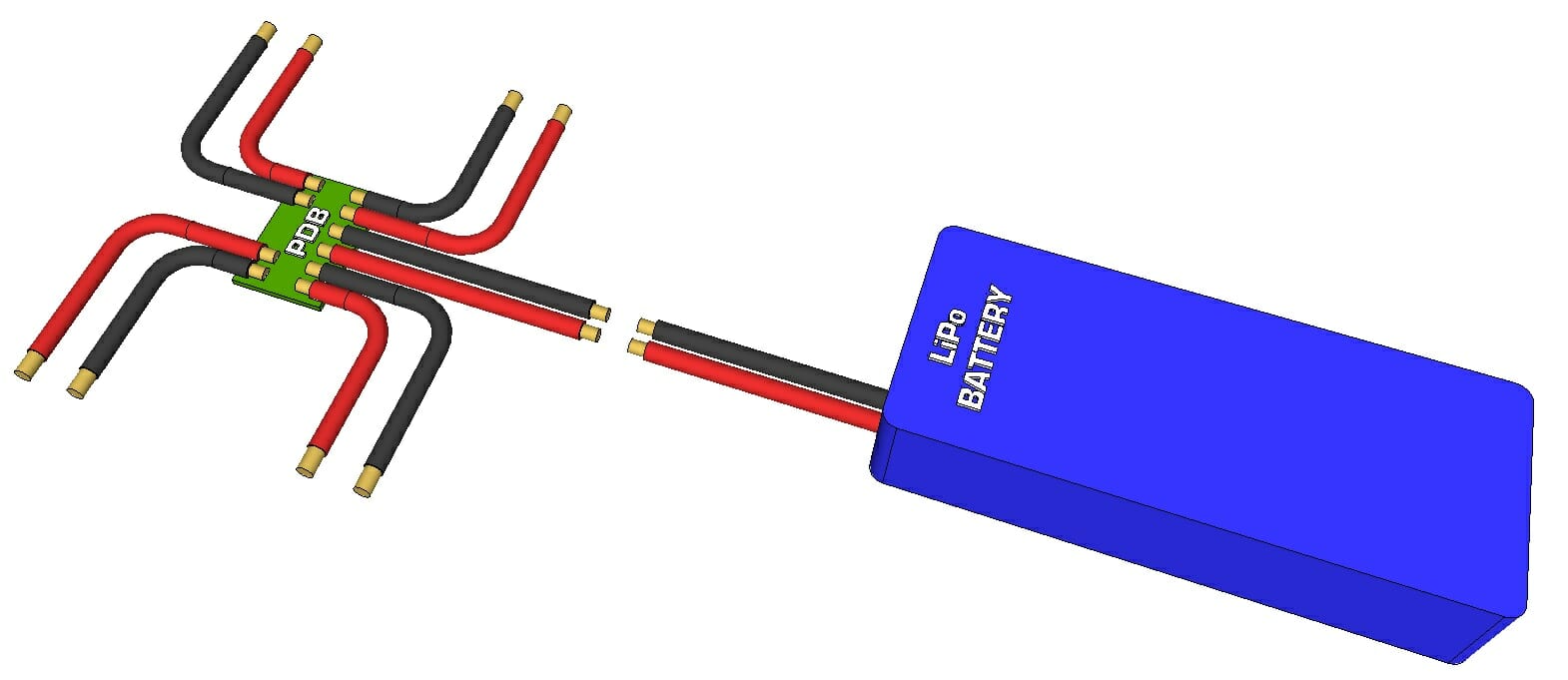
Pila. Distribución de energía
La conexión entre la batería y el sistema de distribución de energía debería ser relativamente simple si ambos tienen el mismo tipo de conector. Si es así, continúe con el siguiente paso. Si los conectores son diferentes, en ningún caso corte los cables de la batería para separar el conector; ¡Esto puede provocar un cortocircuito y una descarga eléctrica desagradable! En su lugar, puede tomar un adaptador y usarlo entre el conector de la batería y el conector de la placa de distribución de energía. Otra opción puede ser buscar un conector de acoplamiento al conector de la batería y comprarlo; luego corte el conector existente del distribuidor de energía y suelde el reemplazo comprado, primero asegurándose de que no haya conexión entre los pines positivo y negativo.
Es importante tener en cuenta que la mayoría de los UAV multirrotor no tienen un interruptor de encendido / apagado, por lo que la energía se suministra y desconecta conectando y desconectando la batería principal del conector del distribuidor de energía, por lo que sus conectores deben estar firmemente sujetos y los cables / puntos de soldadura están bien aislados con tubos termorretráctiles y / o cinta aislante.
Desconecte la batería del distribuidor de energía antes de continuar.
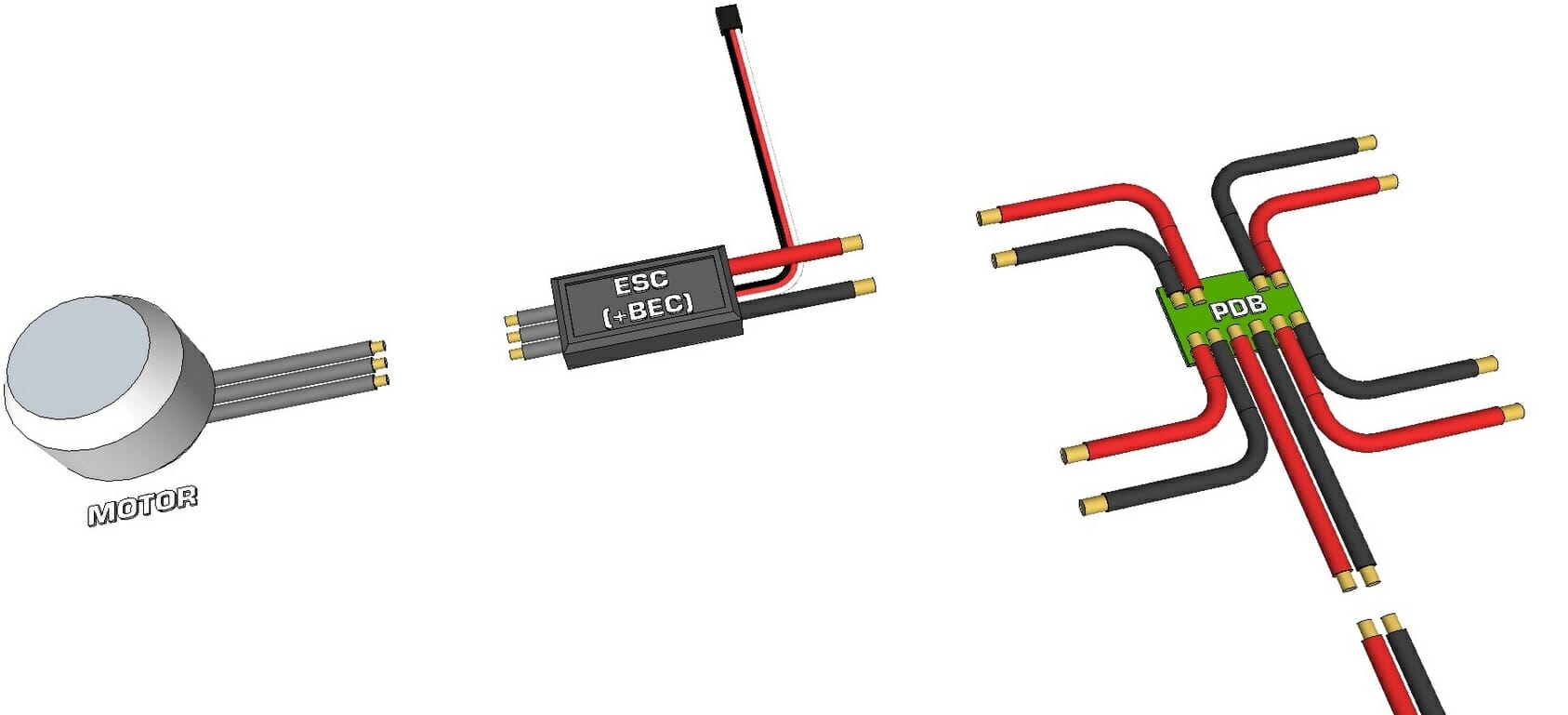
Motor. ESC. Distribución de energía
La placa de distribución de energía (PDP) o distribución por cable sirve principalmente para distribuir energía desde la batería principal a cada ESC. El voltaje se suministra al ESC "tal cual", por lo que no es necesario aumentar (aumentar) o disminuir (disminuir) el voltaje. Si su dron tiene cuatro motores, entonces debe tener cuatro ESC y, por lo tanto, su tablero de distribución / distribución de cables eventualmente debe dividir la batería principal en cuatro conexiones. Si su PRP tiene seis conexiones y está construyendo un cuadricóptero, entonces simplemente no necesita conectar las dos últimas. Si está construyendo un hexacóptero, su PDP debe distribuir la energía de la batería principal a seis conexiones. El ESC incluye los siguientes cables:
- Una cinta de 3 hilos de 0,1 pulgadas con conector R / C, de los cuales el pin negro suele estar conectado a tierra, el rojo proporciona una salida de 5 V (a través de BEC*) y amarillo / blanco es la entrada de señal.
- Tres cables separados se conectan a los tres cables en un motor de CC sin escobillas (generalmente se suministra con conectores de bala hembra que ya están soldados o incluidos).
- Dos conectores de entrada para conectar la batería a la PDB (algunos incluyen conectores soldados con soldadura, algunos están incluidos y, a veces, no).
*Los ESC suelen tener un circuito de eliminación de batería incorporado (o BEC) que convierte el voltaje de la batería principal en 5 V para alimentar el receptor y el controlador de vuelo. Por lo general, se suministran 5 V a través del conector RC del ESC (generalmente el pin central / rojo). Solo necesita un BEC para alimentar el controlador de vuelo.
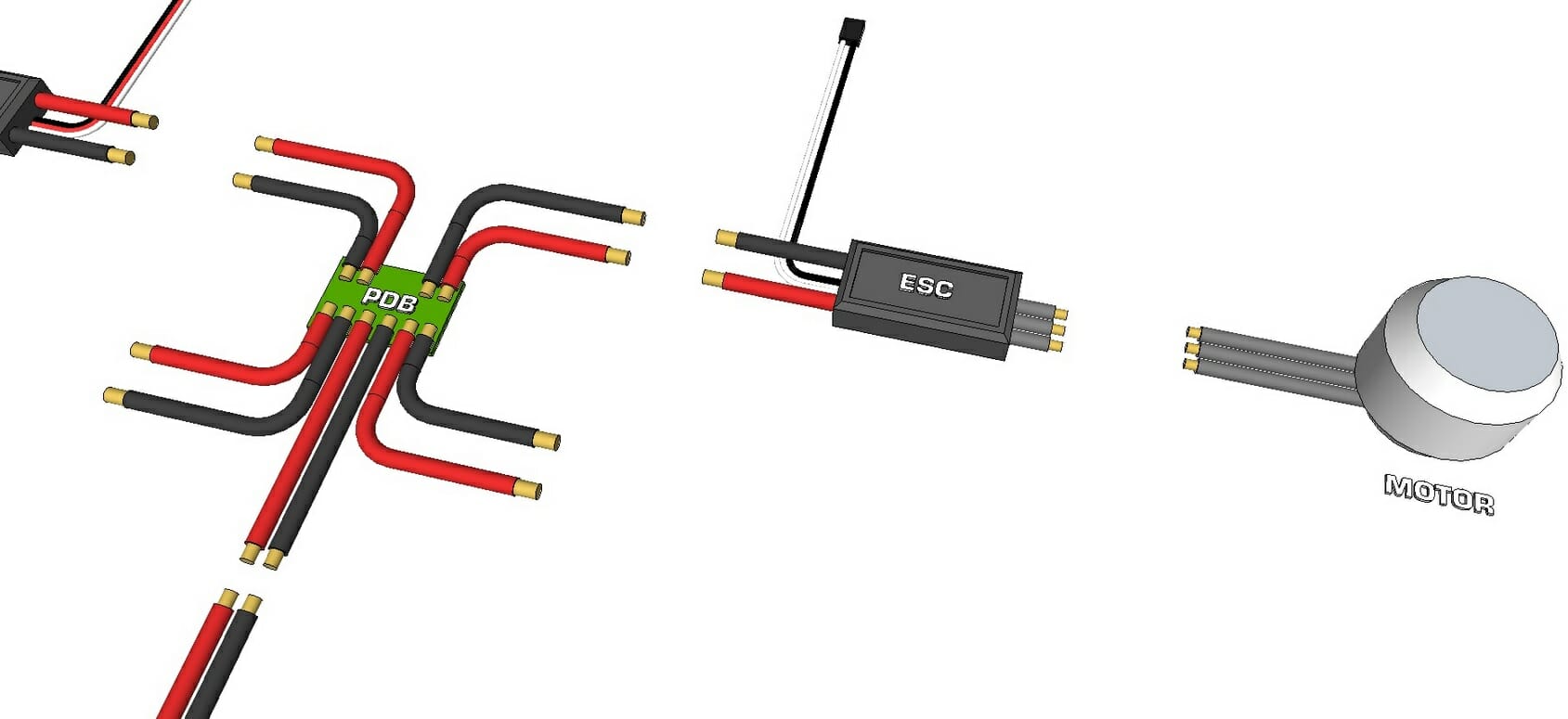
Si la placa de distribución de energía usa conectores que no coinciden con los conectores del ESC o la batería, entonces deberá comprar adaptadores (adaptadores) o comprar conectores nuevos. y reemplácelos en ESC o PRP. La ventaja sigue siendo la placa de distribución de energía, cuyos conectores coinciden con los de la batería y el ESC. Muy a menudo, una batería de polímero de litio de un UAV puede tener conector DEANSXT60EC3
Si desea alimentar componentes electrónicos de baja corriente adicionales (iluminación LED, colgante, etc.) pero no hay conexiones de repuesto en su tablero de distribución de energía, puede usar el cable de carga de la batería. El conector de carga blanco generalmente tiene un pin para tierra y un pin para cada celda (1S, 2S, 3S, etc.) que se usa en el conjunto de la batería LiPo. Aunque este conector es realmente solo para cargar la batería, puede proporcionar un voltaje de salida de 3.7V desde cada pin y se puede usar para alimentar dispositivos electrónicos de baja corriente como un arnés o LED.
- Retire el cable rojo de cada conector R / C de 3 clavijas del control de crucero excepto uno. Se recomienda que haga esto de tal manera que siempre pueda volver a enchufarlos si es necesario. Envuelva el extremo de cada cable excluido con cinta aislante o use tubos termorretráctiles como aislamiento para que luego no puedan entrar en contacto con otros componentes electrónicos. El único cable rojo que se deja intacto alimentará el controlador de vuelo utilizado en el ensamblaje.
- Conecte los dos cables de suministro de cada ESC al tablero de distribución, asegurándose de que el cable rojo vaya a positivo () y el cable negro a negativo (-).
- Si la placa de distribución de energía que está utilizando tiene sus propios conectores R / C, entonces, en este caso, depende de usted conectar los pines R / C de cada ESC a los conectores R / C de esta placa. o conéctelos directamente al controlador de vuelo.
- Conecte cada uno de los tres conectores del motor a los tres conectores ESC. Por el momento, el orden de conexión de estos conectores no es importante (si afecta el sentido de rotación, se corregirá según sea necesario más adelante).
Tenga en cuenta que si decide quitar u ocultar el cableado en esta etapa, es posible que más adelante necesite acceder a algunas de las conexiones de acuerdo con el procedimiento descrito en la Lección 6, en particular, intercambie el conexiones entre el ESC y un motor para que el motor gire en la dirección opuesta.

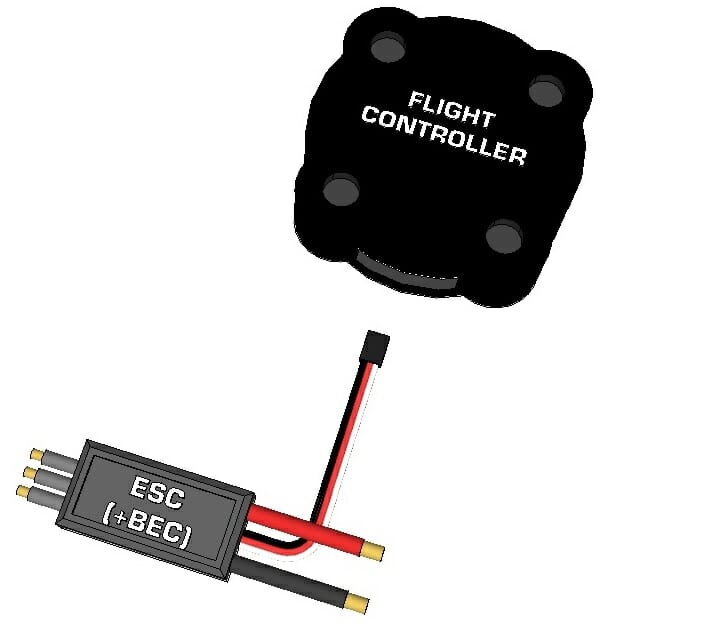
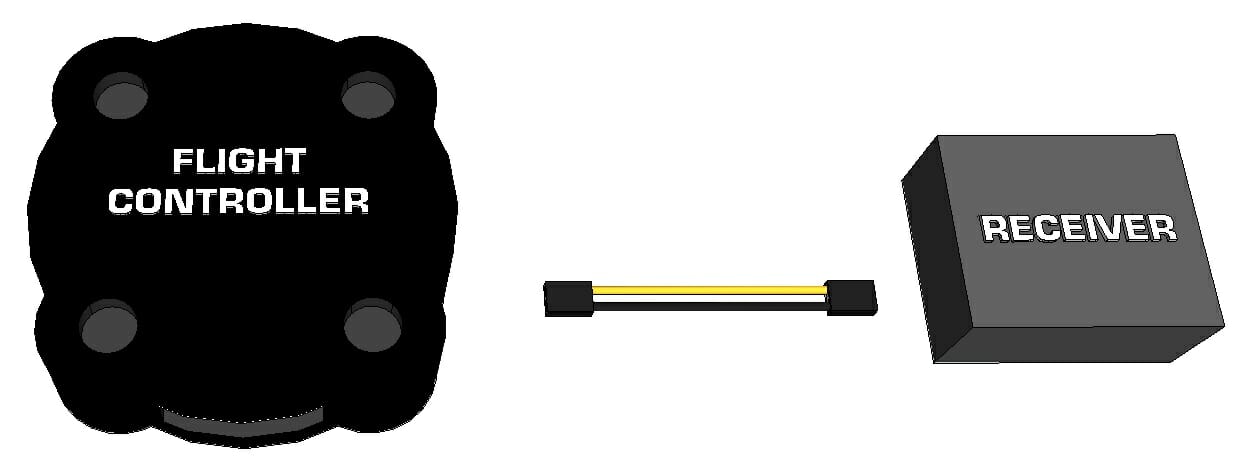
ESC. Controlador de vuelo.
Ahora puede conectar las entradas R / C de los controladores de crucero al controlador de vuelo. El controlador de vuelo que elija debe tener un diagrama que muestre qué pines del controlador están conectados a los motores de su conjunto de múltiples rotores. Este diagrama también debe mostrar la dirección de rotación de cada motor, pero nuevamente, no es necesario que considere la dirección por ahora.
- Vea el diagrama de conexión entre los motores / ESC y el controlador de vuelo en el manual de instrucciones de la PC.
- Conecte los conectores R / C de cada ESC a los pines correspondientes en el controlador de vuelo, asegúrese de que el cable de tierra (generalmente negro) se conecte al pin de tierra del controlador de vuelo y al pin de señal (blanco o amarillo) se conecta al pin de señal en el controlador de vuelo...
- Solo uno de los conectores RC seguirá teniendo el pin rojo (alimentación).
Comunicación
Receptor. Controlador de vuelo.
Suponga que en esta lección ha elegido el control por radio como dispositivo de entrada. Si desea utilizar WiFi, Bluetooth u otro método de entrada, lea el manual del controlador de vuelo y busque la entrada en serie; Esta sección describirá cómo / dónde conectar el dispositivo de entrada en serie al controlador de vuelo. Lo más probable es que necesite encontrar y conectar los pines de transmisión (Tx), recepción (Rx), voltaje (5V) y GND del dispositivo inalámbrico al transmisor, permitiendo Rx de uno a otro Tx, y viceversa.
Su transmisor RC debe venir con un receptor RC apropiado. El receptor debe estar conectado al transmisor para que pueda quitar el puente de enlace del receptor (si lo hubiera). El kit también puede incluir un soporte de batería AA, que está diseñado para alimentar el receptor, pero no lo usaremos ya que el BEC alimentará tanto el receptor como el controlador de vuelo. Para saber qué canales del receptor RC se conectan a qué pines del controlador de vuelo, debe consultar el manual del usuario tanto del controlador de vuelo como del sistema RC.
El manual del controlador de vuelo indicará las ubicaciones de los siguientes pines que se combinarán y conectarán al receptor:
- Acelerador
- Paso
- Guiñada
- Balanceo
- Interruptores auxiliares 1, 2, 3, etc.
Ahora puede hacer las siguientes conexiones:
- Lea el manual del controlador de vuelo para ver qué pin de entrada R / C está conectado con cuál de las funciones anteriores.
- Lea el manual del transmisor para qué canal está asociado con cada función.
- Algunos transmisores RC se pueden reprogramar para cambiar la función de cada contacto. Si decide cambiar cualquier entrada (joystick o interruptor), hágalo solo después de asegurarse de saber qué canal del receptor corresponde a qué función. Acelerador, Pitch, Yaw y Roll siempre deben estar asociados con dos palancas / joysticks, no interruptores o botones.
- Conecte el canal del acelerador en el receptor a la entrada del acelerador en el controlador de vuelo.
- Conecte el canal de tono en el receptor a la entrada de tono en el controlador de vuelo.
- Conecte el canal Yaw en el receptor a la entrada Yaw en el controlador de vuelo.
- Conecte GND en el controlador de vuelo (generalmente la tercera fila de pines) a GND en el receptor (generalmente la tercera fila de pines).
- Si se utilizará la entrada auxiliar, conecte Aux 1 en el receptor a Aux 1 en el controlador de vuelo, y así sucesivamente.
Puede usar cables de servo de 3 pines para cada canal, pero solo uno de los canales (puede ser cualquiera) debe tener voltaje y tierra; el resto solo necesita un cable de señal. Todas las conexiones pueden ser GND a GND, aunque solo se requiere una. Una vez más, el receptor no necesita una batería separada, ya que será alimentado por el controlador de vuelo, que es alimentado por el BEC de uno de los ESC.
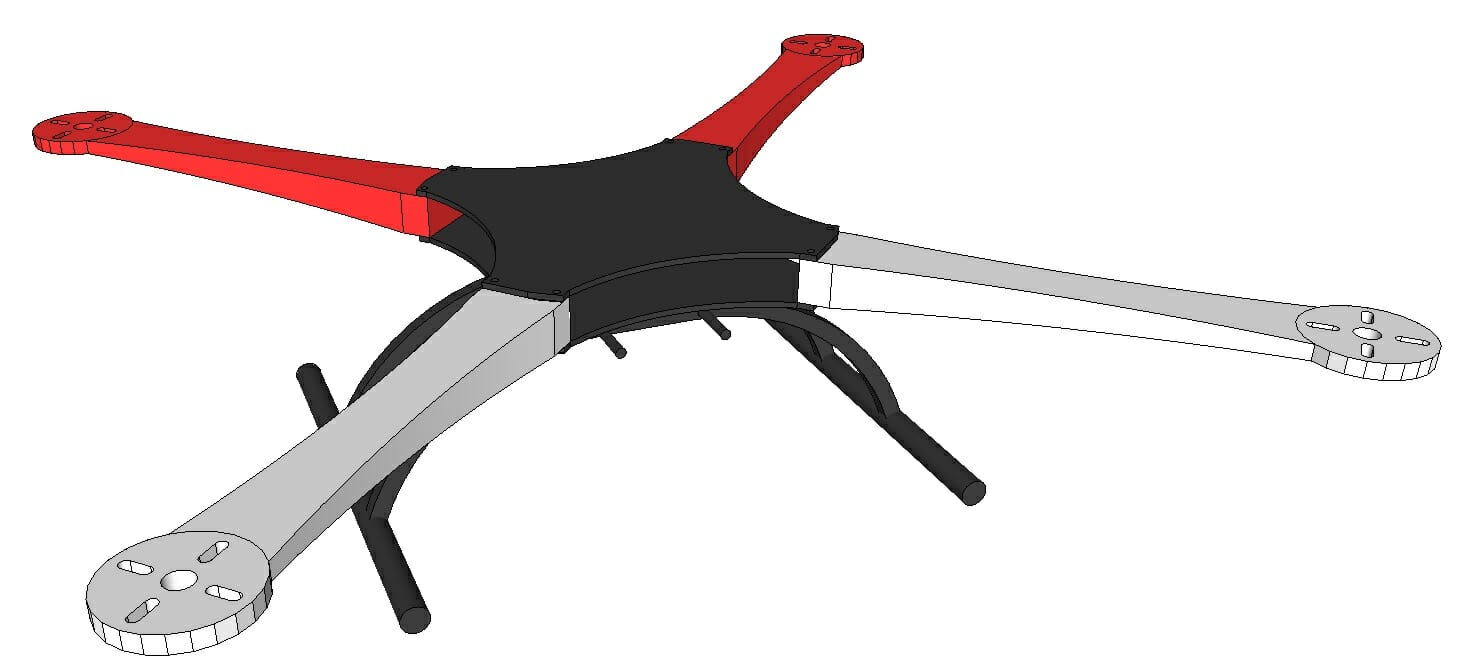
Ensamblaje del marco
Si está construyendo su propio marco, puede ensamblarlo en esta etapa. Si compró un kit de marco, siga las instrucciones de montaje. Tenga en cuenta que es posible que deba desmontar ciertas áreas para facilitar la conexión o quitar (ocultar) elementos eléctricos. El objetivo es garantizar que no haya nada suelto, que todos los cables estén bien sujetos y que nada pueda caerse del marco o enredarse.
Instalación
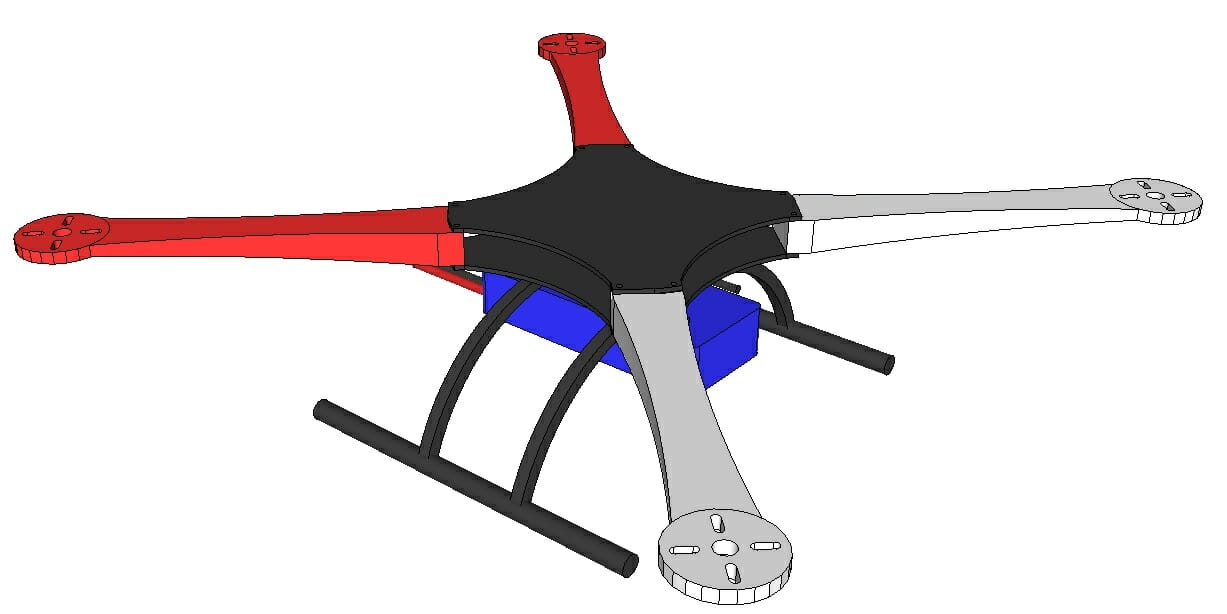
Ubicación de la batería.
La batería que se usa para generar energía es a menudo el elemento más pesado en un UAV y puede oscilar entre 1/4 y 1/2 de su peso total. Por eso, el lugar de su instalación es muy importante. La ubicación ideal para la batería principal debe estar en el centro de la aeronave para que todos los motores puedan manejar aproximadamente la misma carga. Si la batería está ubicada más cerca de la parte trasera de la aeronave, los motores traseros deberán proporcionar más empuje que los motores delanteros y, por lo tanto, el empuje total máximo será limitado (cuando los motores traseros estén en pleno empuje, no habrá empuje en los motores delanteros). Considerando que, el enfoque habitual en el diseño de múltiples rotores es mantener la aeronave simétrica alrededor de una línea central (o al menos un eje), por lo que la batería debe colocarse a lo largo de esa línea central en lugar de desplazarse hacia un lado u otro...
A continuación, deberá decidir a qué altura colocar la batería. Hay varios lugares donde se puede instalar la batería:
- Debajo del marco (el avión será pesado por debajo, más estable y menos acrobático).
- Directamente debajo de los motores (generalmente dentro del marco); posiblemente uno de los mejores lugares.
- A la misma altura que los motores o rotores (p. Ej., Montados en la parte superior del bastidor).
- Por encima de las hélices (el UAV será más pesado en la parte superior y más propenso a volcarse).
Para un mejor rendimiento, lo ideal es que la batería esté ubicada en la posición 3 arriba. La posición 4 crea el efecto de un péndulo invertido, y si el UAV se inclina más allá de cierto ángulo, el dron tenderá a voltearse. La posición 1 creará una plataforma bastante estable que, por su naturaleza, tiende a mantenerse nivelada, pero es extremadamente inadecuada para las acrobacias. Por lo tanto, la mayoría de los diseñadores eligen la posición 2 y colocan la batería directamente debajo del marco o dentro de él. Este enfoque libera espacio debajo del marco para cargas útiles como el sistema de suspensión, y espacio arriba para que el controlador de vuelo y otros componentes electrónicos sean lo más accesibles posible.
Montaje de la batería
Hay muchas formas comunes de sujetar la batería al marco, que incluyen:
- Correas de velcro
- Velcro autoadhesivo (un lado pegado a la batería y el otro al armazón)
- En el armazón
Las correas de velcro son las más comunes para el medio "estándar". Drones personalizados de tamaño ”Si bien la carcasa del armazón se encuentra más comúnmente en los drones comerciales, los armazones de estos vehículos aéreos no tripulados se conciben bajo presión y dejan espacio en el interior específicamente para una batería específica. Idealmente, el velcro solo debe usarse si la batería es relativamente liviana; en lugar de una pequeña sección en el centro, se recomienda pegar una tira a lo largo de toda la batería. Si está utilizando correas de velcro y descubre que la batería tiende a salirse debido a la falta de agarre, se recomienda que agregue tiras de goma donde la batería hace contacto con las correas. No se recomienda usar pegamento para asegurar la batería al marco. Si no está utilizando un UAV, retire la batería y guárdelo en una bolsa segura de LiPo o en un depósito de cerámica.
Carga de la batería
Es muy probable que haya elegido una batería de polímero de litio (LiPo) u otra batería de litio. La mayoría de las baterías LiPo de más de 3.7V tienen un cable de carga separado con un conector de múltiples clavijas para cargar, mientras que el cable de alimentación se puede identificar por la presencia de un conector de dos clavijas con cables más grandes capaces de soportar altas corrientes de descarga. Un conector de carga generalmente tiene un contacto para cada banco de baterías, así como un contacto de tierra común.
Debido a los peligros asociados con las baterías de LiPo (hidrógeno y electricidad), es una práctica común retirar completamente la batería del dron cuando no está en uso y colocarla en una bolsa LiPo Safe. La misma bolsa se usa para cargar la batería (conecte la batería al cargador, coloque la batería en la bolsa (dejando el cargador fuera de la bolsa) y ciérrela (generalmente tiene una solapa de velcro).
.Colocación y montaje del controlador de vuelo
Idealmente, el controlador de vuelo debería estar ubicado en el centro del dron a la misma altura que los motores. Si esto no es posible, entonces el controlador puede colocarse ligeramente hacia arriba o hacia abajo. hacia el lado izquierdo o derecho, y evite montarlo hacia adelante o hacia atrás. Si compró un marco para un UAV, estos a menudo tienen orificios de montaje para el controlador de vuelo, que están en el lugar óptimo. se puede fijar de cualquiera de las siguientes formas básicas:
- Tornillos / Tuercas / Montantes verticales (básico)
- Cinta de doble cara (asegúrese de que sea lo suficientemente fuerte)
- Cinta de espuma de doble cara (para lograr efecto de amortiguación)
- Bujes de amortiguación de goma (para una alta amortiguación)
Algunos controladores de vuelo tienen o pueden tener una funda protectora opcional.
En esta etapa, debe tener un UAV completamente ensamblado y conectado, excluidas las hélices. La lección 6 incluye configurar y probar el transmisor, el software del controlador de vuelo, la verificación previa al vuelo y el primer vuelo.







