Contenidos
- Dron de bricolaje: Lección 1. Terminología.
- Dron de bricolaje: Lección 2. Marcos.
- Dron de bricolaje: Lección 3. Planta de energía.
- Dron de bricolaje: Lección 4. Controlador de vuelo.
- Dron de bricolaje: Lección 5. Montaje.
- Dron de bricolaje: Lección 6. Comprobación de rendimiento.
- Dron de bricolaje: Lección 7. FPV y distancia.
- Drone con tus propias manos: Lección 8. Aviones.
Introducción
En la Lección 5, tenías que terminar de ensamblar el dron (sin instalar hélices). Tómese su tiempo, ya que incluso los pequeños errores pueden provocar un accidente. Todavía tiene algunos pasos antes de su primer vuelo, así que tenga paciencia y siga las pautas a continuación. Como en la lección anterior, continuaremos asumiendo que usa equipo de control de radio para interactuar con el UAV (como el método de control más utilizado en la actualidad).
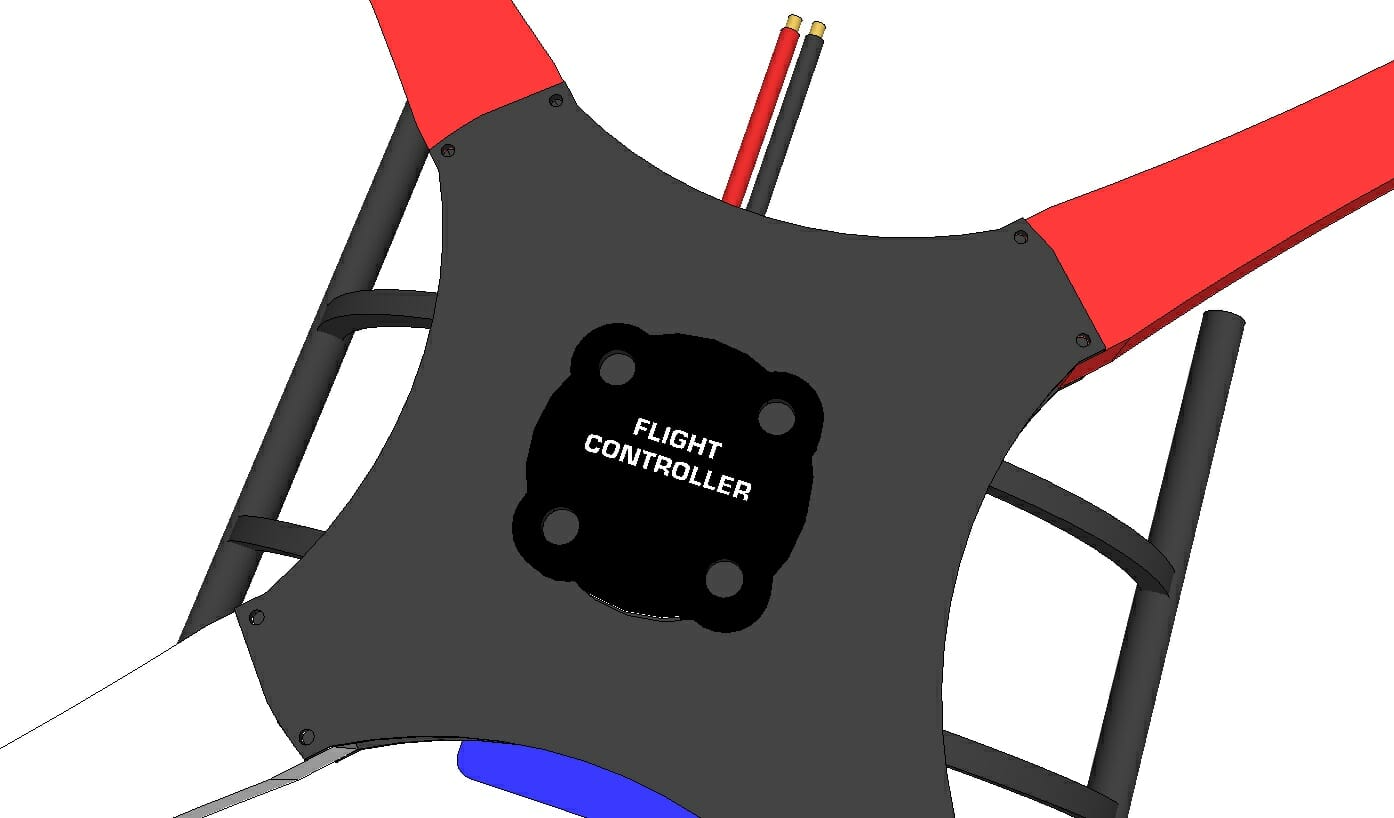
Controlador de vuelo
- No todos los controladores de vuelo son iguales, por lo que el procedimiento de configuración realmente depende del modelo que elija. Si aún no lo ha hecho, tómese el tiempo para leer detenidamente el manual del usuario del controlador de vuelo seleccionado de principio a fin. Omitir el más mínimo detalle puede marcar la diferencia entre un primer vuelo exitoso y una cancelación completa. Un manual de usuario bien escrito debe incluir todo lo que encuentre en esta página y más, por lo que se recomienda que use este tutorial como una lista de verificación y no como un reemplazo / alternativa a las instrucciones básicas para el desarrollador.
- La mayoría de los controladores de vuelo proporcionan un procedimiento paso a paso para seleccionar ajustes para una configuración específica de UAV, incluido el control total sobre los valores PID. Los valores para cada uno (P, I y D) se pueden ajustar para su marco específico y estilo de vuelo; desde algo más estable para usar la plataforma en fotografía aérea, a algo más parecido a los vuelos deportivos (realizar saltos mortales, carreras de drones, etc.). Por lo general, comienza con los valores predeterminados para cada campo, y si no tiene suficiente experiencia para cambiarlos, se recomienda dejar todo como está hasta el primer vuelo.
- El manual del controlador de vuelo también debe indicar cómo establecer las RPM mínimas del motor, es decir, establecer la velocidad a la que giran los motores cuando están cargados. Inicialmente, puede establecer este valor relativamente bajo, solo lo suficiente para ver los motores girando, pero no tanto como para que los UAV se muevan por el empuje que generan. El empuje máximo, si puede establecer este valor, debe corresponder al valor máximo que puede proporcionar la palanca del acelerador de su equipo de control.
- Un aspecto que se puede discutir en el manual del usuario del controlador de vuelo sin hacer ninguna sugerencia es el modo de vuelo. Volviendo a Lección 4, “Modo de vuelo” determina qué sensores se utilizan para estabilizar el dron, así como su función / propósito. Los sensores más comunes que se encuentran en un controlador de vuelo son el giroscopio, el acelerómetro, el barómetro, la brújula y posiblemente el GPS.
- Si este es su primer dron, se recomienda encarecidamente tener el modo de vuelo más estable disponible para su controlador de vuelo, que utiliza la mayor cantidad de sensores disponibles para estabilizar el dron. En general, esto se debe a que la configuración del controlador PID puede estar demasiado lejos de su marco / configuración, por lo que es mejor elegir los valores predeterminados del controlador PID. Si ha volado antes, el modo ACRO (que solo usa el giroscopio) puede ser el mejor.
- La mayoría de los controladores de vuelo también te permitirán cambiar el "modo de vuelo" en vuelo a través de un canal de respaldo. Por ejemplo, si su control remoto tiene seis canales, podría considerar asignar el canal 5 o 6 (que a menudo se asocian con interruptores) para que pueda cambiar el modo de vuelo mientras vuela el dron. Antes de volar, asegúrese de saber qué posición del interruptor corresponde a qué modo de vuelo.
- Se desaconseja encarecidamente utilizar el vuelo con punto de acceso GPS o cualquier función / sensor más sofisticado (por ejemplo, un sensor de distancia ultrasónico para determinar la distancia al suelo) hasta que esté seguro de que el UAV está bien sintonizado. Algunos manuales sugieren usar solo el modo ACRO (acrobático), sin embargo, si no tiene una experiencia de vuelo significativa, volar en este modo no será físicamente posible para usted, el modo es el más difícil de controlar, ya que se excluye la estabilización.
Configuración del equipo de control
- Algunas consolas tienen diferentes modos de funcionamiento, como Avión, Helicóptero, Coche, etc. En 4 (Sección: Control) discutimos los cuatro canales de control principales: Acelerador, Guiñada, Pitch y Roll, que suelen ser valores asociados con aviones o helicópteros. Si el manual del controlador de vuelo no especifica un modo específico para el transmisor, se recomienda utilizar el modo Avión.
- Hay dos tipos de control remoto: Modo 1 (Modo 1) y Modo 2 (Modo 2). El Modo 2 (el más común) con este tipo de control es Acelerador y Guiñada asociados con el canal / joystick / joystick izquierdo, Pitch and Roll con el derecho. También puede verificar su asignación moviendo los palos directamente para asegurarse de que los valores no estén invertidos.
- Los modos de transmisor a menudo agregan niveles de "compensación" de canal / señal para hacer que el movimiento sea más adecuado para un sistema en particular, sin embargo, la mayoría de los controladores de vuelo se preocupan por cualquier compensación y, como tal, prefieren valores "brutos". Si su transmisor no tiene ningún modo, simplemente verifique qué canal / palanca / joystick es responsable de cuál.
- Un transmisor RC de propósito general solo puede proporcionar un rango limitado de señales en cada canal y, por lo tanto, en esta lección le recomendamos que averigüe qué rango de valores puede proporcionar un transmisor RC y si el mínimo y los valores máximos se pueden ajustar (o como valores o como un porcentaje del rango predeterminado). Por ejemplo, los controladores de vuelo basados en MultiWii requieren transmisores que puedan proporcionar un rango completo de pulsos de 500 ms a 2500 ms, mientras que la configuración predeterminada solo puede ser de 1000 ms a 2000 ms, ya que esta es una configuración común para aviones R / C. Lea el manual de su transmisor para saber cómo configurar los puntos finales / rango de la señal (si corresponde).
- Si su controlador tiene una pantalla LCD, a menudo puede hacerlo a través de la interfaz en "Configuración".
- “Prueba del equipo de control a máx. Distancia ”es más fácil de implementar con la ayuda de un amigo / ayudante, o conectar un timbre u otra retroalimentación visual / audible al dron RC. Algunos modelos de gama alta tienen una función de prueba de rango. El objetivo de la prueba es ver qué tan lejos viaja la señal antes de que el receptor ya no pueda captarla. Se recomienda utilizar la prueba de alcance solo después del llamado "vuelo de combate" (vuelo de combate: se prueba el rendimiento del dron a una distancia corta, dentro de la línea de visión del piloto-dron). Procedimiento de prueba de alcance:
- Encienda el equipo de control, luego la aeronave.
- Retroceda 15 metros y active el interruptor asociado con el timbre; Debes escucharlo.
- Si no tiene un timbre, encienda la aeronave y asegúrese de que los motores estén en marcha.
- Silencia el timbre / rearma el dron
- Repite estos pasos cada vez más (línea de visión) hasta que el dron responda a tu entrada.
- Esta será la distancia máxima absoluta a la que puede volar su dron.
- Puede que pienses que no planeas volar tan lejos, pero recuerda que el dron se mueve en tres ejes y algo podría salir mal.
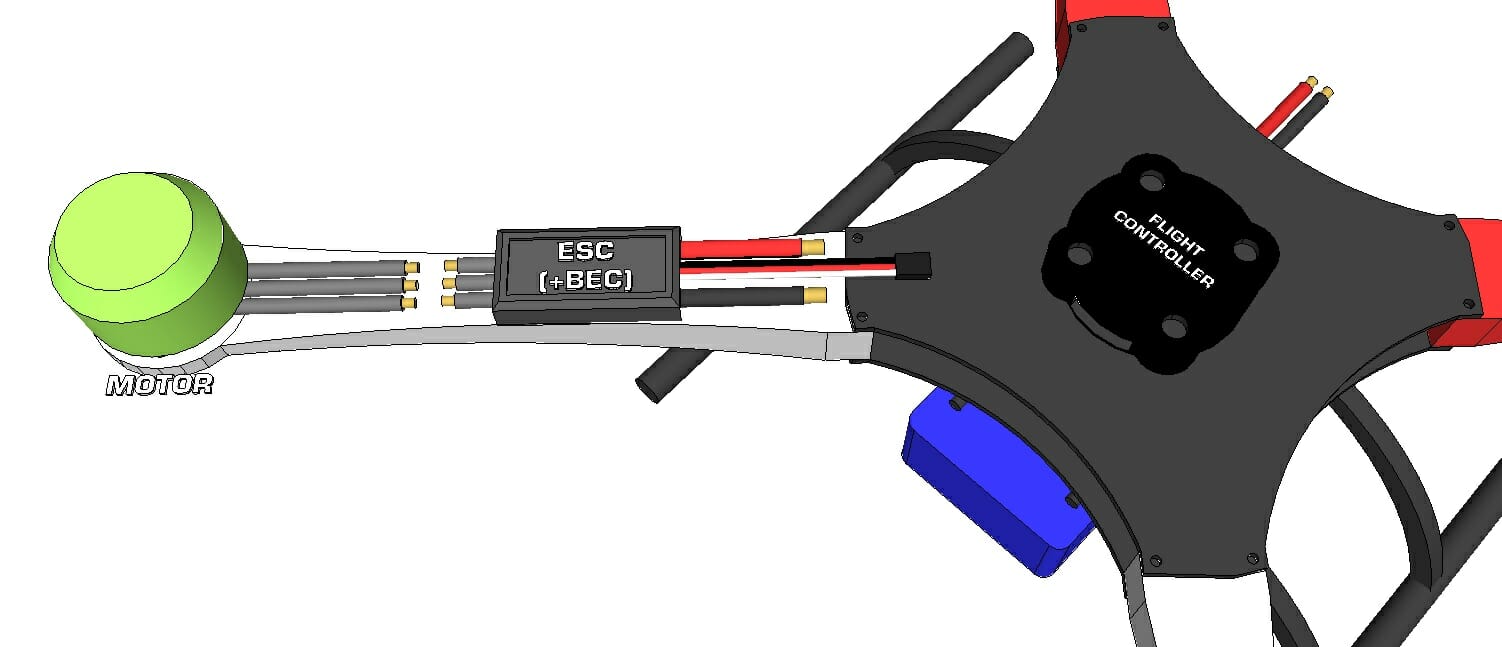
Calibración del ESC
El ESC funcionará de inmediato, pero las señales (PWM / PWM) asociadas con el acelerador mínimo y máximo pueden no coincidir con lo que proporciona su transmisor. Por lo tanto, debe "entrenar" cada ESC con los valores requeridos. Asegúrese de que las hélices no estén montadas en motores. Consulte el manual de usuario de su controlador de vuelo. Después de la reprogramación, el ESC conserva su configuración actual incluso cuando no está encendido. Por lo tanto, cada ESC se programa solo una vez, durante la prueba / configuración inicial.
Por lo general, hay una sección en el manual del controlador de vuelo que explica cómo calibrar el ESC y explica cómo hacerlo. De lo contrario, puede probar uno de los métodos sugeridos a continuación. Una vez más, si aún no ha quitado las hélices, es hora de hacerlo.
Transmisor
- Conecte un ESC al pin "Throttle" de su receptor. Si su ESC no tiene un BEC conectado, puede conectar un ESC habilitado para BEC a otro pin en el receptor (como la entrada de la batería) simplemente para suministrar energía al receptor.
- Conecte el ESC al motor apropiado (si aún no está conectado).
- Ponga el joystick / joystick asociado con “Throttle” al máximo (generalmente el joystick / joystick izquierdo y totalmente hacia adelante / arriba), luego encienda el transmisor.
- Conecte la batería LiPo a la placa de distribución de energía o directamente a este ESC (si los conectores son compatibles).
- El motor debe emitir un pitido tres veces (LiPo de 11,1 V) seguido de una breve pausa seguida de dos pitidos cortos (que es el pitido máximo).
- Inmediatamente después de pitidos cortos, mueva la palanca del acelerador / joystick a la posición más baja (que es el pitido mínimo).
- El motor debe emitir un pitido tres veces (LiPo de 11,1 V) seguido de un pitido largo.
- El rango del acelerador para este ESC ahora está configurado, pase al siguiente hasta que todos los ESC hayan sido calibrados.
Otros métodos
Siga las instrucciones del manual del usuario del producto para hacer coincidir el rango mínimo / máximo de la señal de entrada ESC con lo que recibirá del transmisor.
- USB: Algunos modelos ESC son programables a través de USB, ya sea de forma independiente o con un adaptador.
- Placa de programación: Placa de programación ESC externa, se puede utilizar con casi cualquier ESC y es un dispositivo independiente.
- Microcontrolador: Este método no se usa mucho, pero ciertamente es posible reprogramar el ESC con un microcontrolador si tiene el código correcto y puede conectarse correctamente.
- Controlador de vuelo: Algunos controladores de vuelo le permiten calibrar o programar ESC a través de su interfaz de programación. Lea las instrucciones de su controlador de vuelo para ver si esto es posible.
Motor y rotor principal (hélice). Dirección.
Ahora está listo para instalar las hélices. Regresemos a la lección 3, que analiza la dirección del rotor principal para crear empuje. Todas las hélices tienen una parte superior e inferior y una dirección de rotación CW (en el sentido de las agujas del reloj) y CCW (en sentido contrario a las agujas del reloj). Por lo general, hay texto en la parte superior de un accesorio que indica su altura y diámetro. Cuando la hélice está montada en el eje del motor, esta parte superior apunta hacia el cielo, independientemente de si el motor está montado en la parte superior del haz del dron o en la parte inferior del dron.

Lista de verificación previa al vuelo del piloto
Aunque el dron no es tan complejo ni peligroso como un avión comercial real, usted - como piloto y debe tener una lista de verificación previa al vuelo para asegurarse de que el próximo vuelo no ponga en peligro a las personas ni a la propiedad. La siguiente lista cubre solo lo esencial y debe realizarse antes de cada vuelo (no solo antes del primero).
- Asegúrate de tener alguna de las ayudas visuales disponibles para saber qué lado de tu dron está al frente. Como mínimo, agregue cinta de color a las dos vigas frontales.
- Asegúrese de que la batería del equipo de control esté cargada.
- Agite el UAV ligeramente: nada debe aflojarse, traquetear o caer al suelo. Nunca sabrá qué pudo haber sido desplazado o roto como resultado de un aterrizaje forzoso en un vuelo anterior.
- Asegúrese de que las hélices aún estén fijadas de forma segura.
- Primero enciende el equipo de control, luego enciende el dron (mantén las manos alejadas de los rotores).
- Asegúrese de poder armar y rearmar los motores de manera confiable (deben girar a bajas RPM cuando se "Armar" y dejar de girar cuando "Desarmar")
- Asegúrese de calibrar o los sensores están bien calibrado (debe hacer esto con regularidad)
- Compruebe el alcance del transmisor.
- Asegúrese de que el área de vuelo esté completamente despejada y si hay alguien dentro, avísele, especialmente a los niños curiosos; que está volando el UAV y que no debe acercarse hasta que el dron haya aterrizado con los motores completamente detenidos.

Pruebas
Hasta que ganes suficiente confianza en tus habilidades como piloto y diseñador de drones, el siguiente procedimiento es sugerido para todos los vehículos aéreos no tripulados antes de su primer vuelo.
- Encienda los motores y asegúrese de que giren en las direcciones correctas como se describe en el manual del controlador de vuelo.
- Levante la palanca del acelerador / joystick muy lentamente y asegúrese de que las hélices empujen el aire hacia el suelo. El uso de papel tisú es una opción segura para la inspección visual.
- Mueva la palanca de tono / joystick con mucho cuidado hacia adelante o hacia atrás para asegurarse de que el dron se incline hacia adelante o hacia atrás correctamente.
- Mueva con mucho cuidado la palanca de balanceo / joystick hacia cada lado para asegurarse de que el dron responda correctamente.
Si el dron no se comporta correctamente, hay muchas razones posibles, entre las cuales las más comunes son:
- Uno o más motores están girando en la dirección incorrecta.
- El controlador de vuelo no se instaló correctamente y lo que considera "avanzado" es diferente de su UAV físico.
- Uno o más contactos entre el receptor y el controlador de vuelo no están conectados correctamente o incluso en el lugar equivocado.
- Quizás todo esté configurado correctamente, demasiado rápido o demasiado abruptamente para responder a la entrada del usuario.
Plan de emergencia
recién comenzando a trabajar en el campo y / o con un dron nuevo. La siguiente lista tiene la intención de darle cosas en las que pensar y algunas ideas sobre cómo y por qué responder a los aspirantes a pilotos. La decisión se toma caso por caso y, en algunas situaciones, puede contradecir lo que se propone aquí. Así que conócete a ti mismo, conoce tu entorno y ¡ten cuidado! En casi todos los casos, será mejor perder el dron que arriesgarse a chocar con personas o bienes.
El dron está muy lejos y no sabes en qué dirección está.
- Reducir el acelerador y observar si el dron responde (comprueba si hay comunicación).
- Si el dron responde al gas, intenta aterrizar allí mismo (si puedes).
- Si esta ubicación no es adecuada para el aterrizaje, trate de dirigir el dron hacia adelante con cuidado (nada drástico), y si el dron reacciona confiando en su posición, moverse hacia la izquierda o hacia la derecha en el cielo le permitirá determinar su orientación. Si no parece moverse hacia la izquierda o hacia la derecha, es posible que se mueva hacia usted o alejándose de usted, así que deshaga lo que acaba de hacer e intente fregar hacia la izquierda.
El dron de repente se desvía bruscamente de su curso (con o sin razón).
- Si no eres competente en el pilotaje (para intentar restaurarlo), suelta el acelerador por completo y déjalo caer: en este caso, contemplar una acción radical puede llevarte a perder de vista del dron o, peor aún, el dron comenzará a trepar para caer desde una distancia mayor.
El dron se mueve rápidamente hacia la gente.
- Gas al máximo para que gane altura y sobrevuele; su dron probablemente todavía estará en la orientación general correcta, por lo que es mejor perder el dron que volar hacia las personas.
- Después de alcanzar la altitud óptima, intente recuperar el control, luego colóquelo de manera que quede por encima del área de aterrizaje despejada.
El dron se mueve rápidamente hacia ti.
- Gas a cero; déjalo chocar contra el suelo para que vuele en tu cabeza.
El dron no responde a la entrada del equipo de control.
- En ese caso, no hay nada que pueda hacer. Si su dron todavía está en el aire, las baterías de su control remoto podrían estar agotadas.
El dron pierde la hélice.
- La pérdida de una hélice afecta tanto al empuje como a la guiñada; Intente enderezar la guiñada primero (probablemente necesite mantener la palanca / joystick conectada a la guiñada, en la posición extrema), y luego, al mismo tiempo, mueva con cuidado la palanca del acelerador / acelerador hacia arriba para evitar una colisión, luego el acelerador hacia abajo.
Primer vuelo
Independientemente de su experiencia de vuelo anterior, su primer vuelo, especialmente con un UAV multimotor personalizado, debe ser lo más discreto posible. El propósito del primer vuelo es asegurarse de que todo esté configurado correctamente; así como identificar cualquier problema grave.
- Ubicación: área abierta, lejos de edificios, personas y propiedades. Por ejemplo: un campo de fútbol vacío, un campo de béisbol, etc. sería ideal. No debería haber viento en absoluto.
- Revise la lista de verificación previa al vuelo del piloto.
- Párate a unos 2 metros del dron con la parte delantera del dron hacia el lado opuesto de ti.
- Arme los motores.
- Mueva suavemente la palanca del acelerador / joystick hacia arriba. Llega al punto donde el dron está listo para despegar. Puede haber algunos efectos en el suelo que hagan que el dron rebote ligeramente, pero no se preocupe.
- Agregue aceleración para que el dron despegue del suelo y se acostumbre a los controles; trate de mantenerlo dentro de un cierto radio y vea cómo reacciona a los movimientos de su palanca / joystick.
- Haga movimientos pequeños, graduales y fluidos, nada demasiado repentino. Baje la palanca del acelerador para evitar un accidente.
- Si su dron no se comporta como se esperaba (por ejemplo, mover el eje "Pitch" lleva a su cabeceo, así como rodar hacia la izquierda o hacia la derecha), algo anda mal, y tendrá que averiguar el causas de los problemas identificados...
- Si el dron se comporta como se espera, su tarea es mantener su posición de manera constante a una altura de 1,2 a 2 metros del suelo. No te enojes tan rápido.


.Vuelos adicionales
Ahora que has resuelto los fallos y vuela cómodamente en un entorno controlado, puede continuar con el segundo vuelo.
- Dado que el dron aún no está completamente probado, sugerimos pasar por el procedimiento completo previo al vuelo para el primer vuelo, que no debería tomar mucho tiempo.
- Utilizando movimientos suaves, acostúmbrate a cómo reacciona el dron a tus movimientos de palanca / palanca manteniéndolo a una distancia segura.
- La adaptación para pilotar un dron debe realizarse sin la ayuda de FPV y varios sensores.







