مطالب
مقدمه
اکنون که یک قاب را انتخاب کرده اید یا ساخته اید ، مرحله بعدی انتخاب سیستم محرکه مناسب است. از آنجا که اکثر هواپیماهای بدون سرنشین موجود الکتریکی هستند ، ما بر تولید پیشرانه کاملاً الکتریکی از طریق موتورهای DC بدون برس تمرکز می کنیم. این نیروگاه شامل موتورها ، روتورها (ملخ ها ، پروپوزها ، ESC و یک باتری ذخیره سازی است.
1. موتور
موتورهایی که در مونتاژ خود استفاده می کنید تعیین می کند که حداکثر بار باری که می تواند پهپاد را بلند کند و همچنین چه مدت می تواند در پرواز باشد. نیروگاه لزوماً باید از موتورهای یک مارک و مدل مشابه تشکیل شود ، این رویکرد عملکرد متعادل را برای آن فراهم می کند. لازم به ذکر است که حتی موتورهای کاملاً یکسان (مارک / مدل) می توانند تفاوت کمی در سرعت داشته باشند ، که متعاقباً توسط کنترل کننده پرواز تنظیم می شود.
براش بدون براشلس
در موتورهای براش شده ، روتور زخم در داخل استاتور که آهن ربا بر روی آن محکم ثابت شده است ، می چرخد. در موتورهای بدون برس ، همه چیز یک انقلاب است. سیم پیچ به طور محکم در داخل استاتور ثابت می شود و آهن ربا روی شفت نصب شده و می چرخد. در بیشتر موارد ، شما فقط موتورهای DC بدون برس (BC) را در نظر خواهید گرفت. موتورهای این نوع به طور گسترده ای در صنعت رادیو آماتور برای مونتاژ محصولات مختلف از هلیکوپتر و هواپیما گرفته تا سیستم های سواری در اتومبیل و قایق استفاده می شود.
موتورهای بدون برس پنکیک دارای قطر بزرگتر ، مسطح تر و عموماً دارای گشتاور بالا و KV پایین تر هستند (جزئیات در زیر). پهپادهای کوچک (معمولاً اندازه کف دست) اغلب به دلیل هزینه کمتر و کنترلر ساده دو سیم از موتورهای برس کوچک استفاده می کنند. در حالی که موتورهای بدون برس دارای اندازه ها و مشخصات مختلفی هستند ، اما انتخاب اندازه کوچکتر به این معنی نیست که ارزان تر خواهد بود.

Inrunner vs Outrunner
چندین نوع موتور DC بدون برس وجود دارد:
- Inrunner یک روتور داخلی است به سیم پیچ به استاتور ثابت می شود ، آهن ربا روی محور روتور نصب می شود ، که می چرخد (معمولاً به دلیل KV بالا در قایق های RC ، هلیکوپترها و اتومبیل ها استفاده می شود).
- Outrunner - روتور خارجی. آهن ربا بر روی استاتور ثابت می شود که در اطراف یک سیم پیچ ثابت می چرخد. پایین موتور ثابت است.(به عنوان یک قاعده ، موتورهای این نوع گشتاور بیشتری دارند).
- Hybrid Outrunner از نظر فنی "Outrunner" است اما در بسته "Inrunner" اجرا می شود. این رویکرد امکان ترکیب در یک نوع گشتاور "Outrunner" و عدم وجود عناصر دوار خارجی مانند موتورهای نوع "Inrunner" را فراهم کرد.
KV
رتبه KV - حداکثر تعداد دورهایی که موتور می تواند بدون از دست دادن قدرت در ولتاژ معین ایجاد کند. برای اکثر پهپادهای چند روتور ، مقدار KV پایین (به عنوان مثال ، از 500 تا 1000) مناسب است ، زیرا این امر به اطمینان از ثبات کمک می کند. در حالی که برای پروازهای آکروباتیک مقدار KV بین 1000 تا 1500 مناسب خواهد بود ، همزمان با روتورهای قطر کوچکتر (ملخ). فرض می کنیم مقدار KV برای یک موتور خاص 650 دور در دقیقه است ، سپس در ولتاژ 11.1 ولت موتور با سرعت: 11.1 × 650 = 7215 دور در دقیقه می چرخد و اگر از موتور با ولتاژ کمتر استفاده می کنید (مثلاً 7.4 ولت) ، سپس سرعت چرخش: 7.4 × 650 = 4810 دور در دقیقه خواهد بود. با این حال ، مهم است که توجه داشته باشید که استفاده از ولتاژ پایین به طور کلی به معنای مصرف جریان بیشتر (قدرت = جریان × ولتاژ) است.
رانش
برخی از تولید کنندگان موتورهای بدون برس می توانند در مشخصات مشخصات حداکثر رانش احتمالی (رانش) ایجاد شده توسط موتور در ارتباط با روتور توصیه شده را مشخص کنند. واحد اندازه گیری رانش معمولاً کیلوگرم (کیلوگرم / کیلوگرم) ، پوند (پوند) یا نیوتن (N) است. به عنوان مثال ، اگر در حال ساخت یک کوادروکوپتر هستید و مقدار رانش یک موتور را می دانید = حداکثر 0.5 کیلوگرم در محفظه ای با روتور 11 اینچی ، در خروجی چهار موتور از این قبیل را می توان با حداکثر رانش بلند کرد: 0.5 کیلوگرم × 4 = 2 کیلوگرم بر این اساس ، اگر وزن کل کوادکوپتر شما کمی کمتر از 2 کیلوگرم باشد ، در چنین نیروگاهی تنها در حداکثر دور در دقیقه (حداکثر رانش) بلند می شود. در این مورد ، یا انتخاب بسته نرم افزاری موتور روتور قوی تر ، که نیروی بیشتری به همراه می آورد ، یا کاهش وزن کل هواپیمای بدون سرنشین مناسب خواهد بود. در حداکثر رانش نیروگاه = 2 کیلوگرم ، وزن هواپیمای بدون سرنشین نباید بیش از نیمی از این مقدار باشد (1 کیلوگرم ، شامل وزن خود موتورها). محاسبه مشابهی را می توان برای هر پیکربندی انجام داد. فرض کنید وزن هگزاکوپتر (شامل قاب ، موتور ، لوازم الکترونیکی ، لوازم جانبی و غیره) 2.5 کیلوگرم است. این بدان معناست که هر موتور برای چنین مجموعه ای باید (2.5 کیلوگرم ÷ 6 موتور) × 2 = 0.83 کیلوگرم رانش (یا بیشتر) را ارائه دهد. اکنون می دانید که چگونه محاسبه مطلوب موتورها را بر اساس وزن کل محاسبه کنید ، اما قبل از تصمیم گیری ، پیشنهاد می کنیم با بخشهای زیر آشنا شوید.
ملاحظات اضافی
- اتصالات: موتورهای برس DC دارای دو کانکتور "" و "-" هستند. تغییر سیم ها در مکان ها جهت چرخش موتور را تغییر می دهد.
- اتصالات: موتورهای DC بدون برس دارای سه کانکتور هستند. برای اطلاع از نحوه اتصال آنها و همچنین نحوه تغییر جهت چرخش ، به بخش ESC زیر مراجعه کنید.
- سیم پیچ: سیم پیچ ها بر KV موتورها تأثیر می گذارند.اگر به کمترین مقدار KV احتیاج دارید اما گشتاور را در اولویت قرار می دهید ، بهتر است توجه خود را به موتورهای DC براشلس نوع Pancake معطوف کنید.
- نصب: اکثر سازندگان یک نمودار سیم کشی کلی برای موتورهای DC برای موتورهای DC دارند که به شرکت های قاب اجازه می دهد از ساختن به اصطلاح آداپتورها اجتناب کنند. الگو معمولاً متریک است ، دو سوراخ با فاصله 16 میلی متر و دو سوراخ دیگر با فاصله 19 میلی متری (90 درجه نسبت به اول).
- موضوع: نخ نصب شده برای اتصال موتور بدون برس به قاب ممکن است متفاوت باشد. اندازه متریک معمول پیچ M1 ، M2 و M3 است ، اندازه امپریالیستی می تواند 2-56 و 4-40 باشد.
2. روتورهای اصلی (پروانه ها)
روتورهای اصلی (ملخ ها ، پروپوزن های مختصر) برای پهپادهای چند روتور از پروانه های هواپیماهای کنترل رادیویی سرچشمه می گیرند. بسیاری خواهند پرسید: چرا از پره های هلیکوپتر استفاده نمی کنید؟ حتی اگر این کار قبلاً انجام شده است ، ابعاد یک هگزاکوپتر با پره های هلیکوپتر را تصور کنید. همچنین شایان ذکر است که سیستم هلیکوپتر نیاز به تغییر در سطح تیغه ها دارد و این امر طراحی را پیچیده می کند.
همچنین ممکن است بپرسید چرا از موتور توربوجت ، موتور توربوفن ، موتور توربوپراپ و غیره استفاده نمی کنید؟ مطمئناً آنها در ارائه فشار زیاد بسیار خوب هستند ، اما به انرژی زیادی نیز احتیاج دارند. اگر دغدغه اصلی پهپاد این باشد که خیلی سریع حرکت کند نه اینکه در یک فضای محدود حرکت کند ، یکی از موتورهای فوق ممکن است گزینه خوبی باشد.
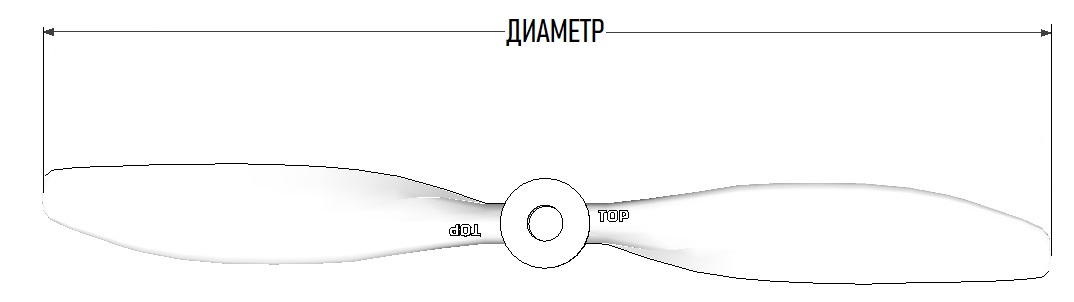
تیغه ها و قطر
روتور اصلی بیشتر پهپادهای چند روتور دارای دو یا سه پره است. بیشترین استفاده از ملخ ها دارای دو تیغه است. تصور نکنید که افزودن پره های بیشتر به طور خودکار رانش را افزایش می دهد. هر تیغه در جریان آشفته تیغه قبلی کار می کند و کارایی پروانه را کاهش می دهد. روتور اصلی با قطر کوچک اینرسی کمتری دارد و بنابراین شتاب و سرعت آن آسان تر است ، که برای پروازهای آکروباتیک مهم است.

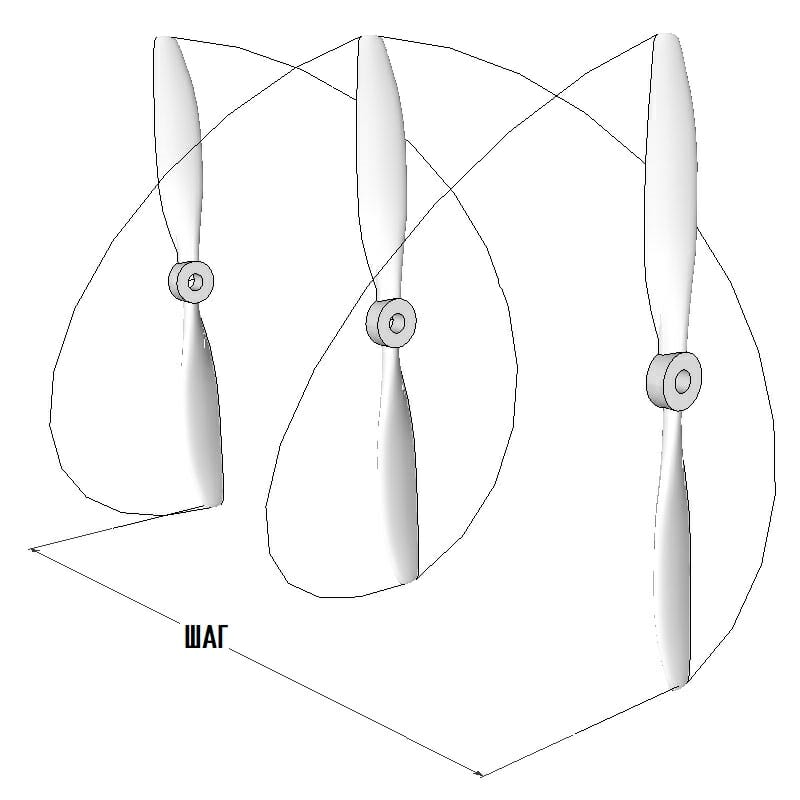
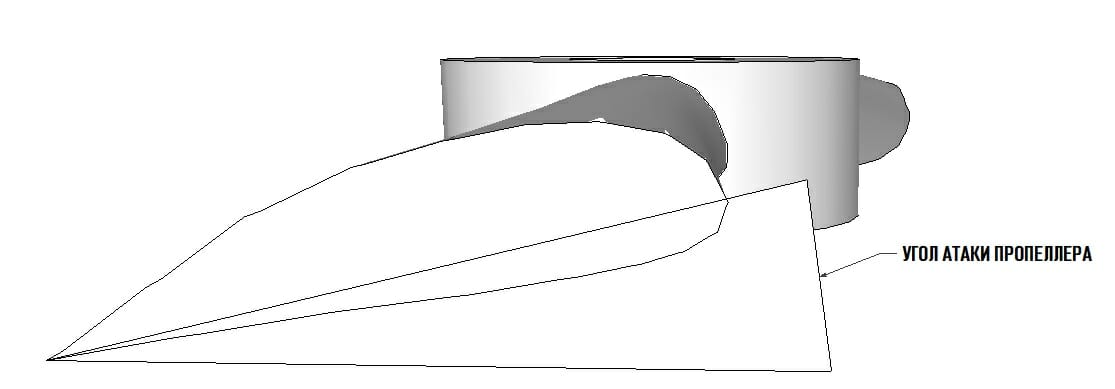
گام / زاویه حمله / کارایی / رانش
رانش ایجاد شده توسط روتور اصلی بستگی به چگالی هوا ، تعداد دور پروانه ، قطر آن ، شکل و مساحت تیغه ها و همچنین گام آن دارد. کارایی یک پروانه به زاویه حمله مربوط می شود که به عنوان گام تیغه منهای زاویه مارپیچ (زاویه بین سرعت نسبی حاصله و جهت چرخش تیغه) تعریف می شود. کارایی خود نسبت توان خروجی به توان ورودی است. بیشتر پروانه های خوب طراحی شده بیش از 80 درصد کارآمد هستند. زاویه حمله تحت تأثیر سرعت نسبی قرار می گیرد ، بنابراین پروانه در سرعت های مختلف موتور کارایی متفاوتی خواهد داشت. لبه جلویی تیغه روتور اصلی نیز بر کارآیی بسیار تأثیر می گذارد و بسیار مهم است که تا حد ممکن صاف باشد.در حالی که یک طرح گام متغیر بهترین حالت را خواهد داشت ، پیچیدگی اضافی مورد نیاز برای سادگی ذاتی چند روتور به این معنی است که یک ملخ گام متغیر تقریباً هرگز استفاده نمی شود.
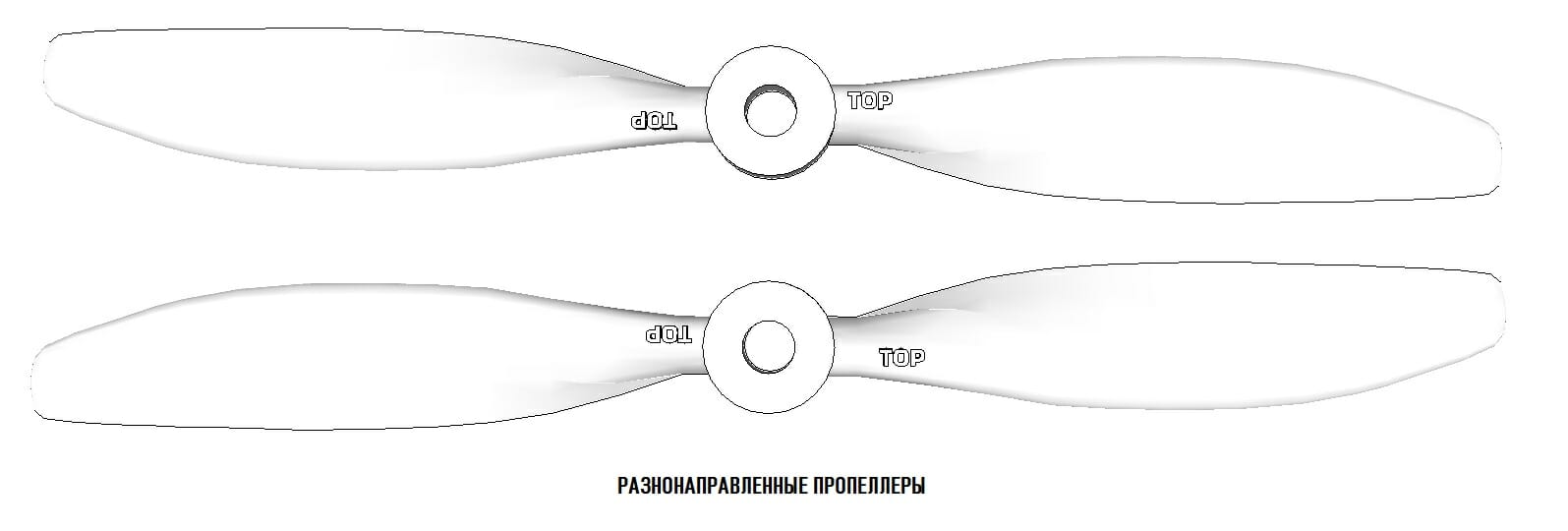
چرخش
روتورها برای چرخش در جهت عقربه های ساعت (CW) ، یا خلاف جهت عقربه های ساعت طراحی شده اند. (CCW). جهت چرخش با شیب تیغه نشان داده می شود ( از انتهای باسن به پروانه نگاه کنیدVtailY6X8
مواد اجرا
مواد (های) مورد استفاده برای ساخت روتور (ملخ) ممکن است تأثیر متوسطی در پرواز داشته باشد عملکرد اما ایمنی باید اولویت اصلی باشد ، به خصوص اگر مبتدی و بی تجربه هستید.
- پلاستیک (ABS / نایلون و غیره) محبوب ترین انتخاب در مورد پهپادهای چند موتوره است. این عمدتا به دلیل هزینه کم ، ویژگی های مناسب پرواز و دوام نمایی است. به طور معمول ، در صورت تصادف ، حداقل یک پروانه خراب می شود ، و در حالی که بر هواپیمای بدون سرنشین مسلط هستید و پرواز را یاد می گیرید ، همیشه لوازم جانبی زیادی خواهید داشت. سفتی و مقاومت ضربه پلاستیکی را می توان با تقویت با فیبر کربن (کربن) بهبود بخشید ، این روش حداکثر است. در مقایسه با پروانه الیاف کربن کاملاً کارآمد و نه چندان گران.
- پلیمر تقویت شده با الیاف (فیبر کربن ، نایلون تقویت شده با کربن و غیره) -فناوری "پیشرفته" است در رابطه زیاد ساخت قطعات فیبر کربن هنوز چندان آسان نیست و بنابراین هزینه بیشتری برای آنها نسبت به پیچ پلاستیکی معمولی با پارامترهای مشابه می پردازید. شکستن یا خم شدن پروانه ای از الیاف کربن سخت تر است و بنابراین ، اگر خراب شود ، به هر چیزی که با آن تماس پیدا کند آسیب بیشتری وارد می کند. در عین حال ، پروانه های کربن عموماً خوب ساخته شده ، سفت تر هستند (حداقل کارایی را از دست می دهند) ، به ندرت به تعادل نیاز دارند و وزن آنها نسبت به سایر مواد سبک تر است. توصیه می شود چنین پروانه هایی را تنها پس از راحت شدن سطح خلبانان کاربر در نظر بگیرید.
- چوب ماده ای است که به ندرت برای تولید روتورهای پهپاد چند روتور استفاده می شود ، زیرا ساخت آنها نیاز به پردازش مکانیکی دارد ، که بعدا پروانه های چوبی را گران تر از پیچ های پلاستیکی می کند.در عین حال ، درخت کاملاً قوی است و هرگز خم نمی شود. توجه داشته باشید که پروانه های چوبی هنوز در هواپیماهای رادیو کنترل استفاده می شوند.



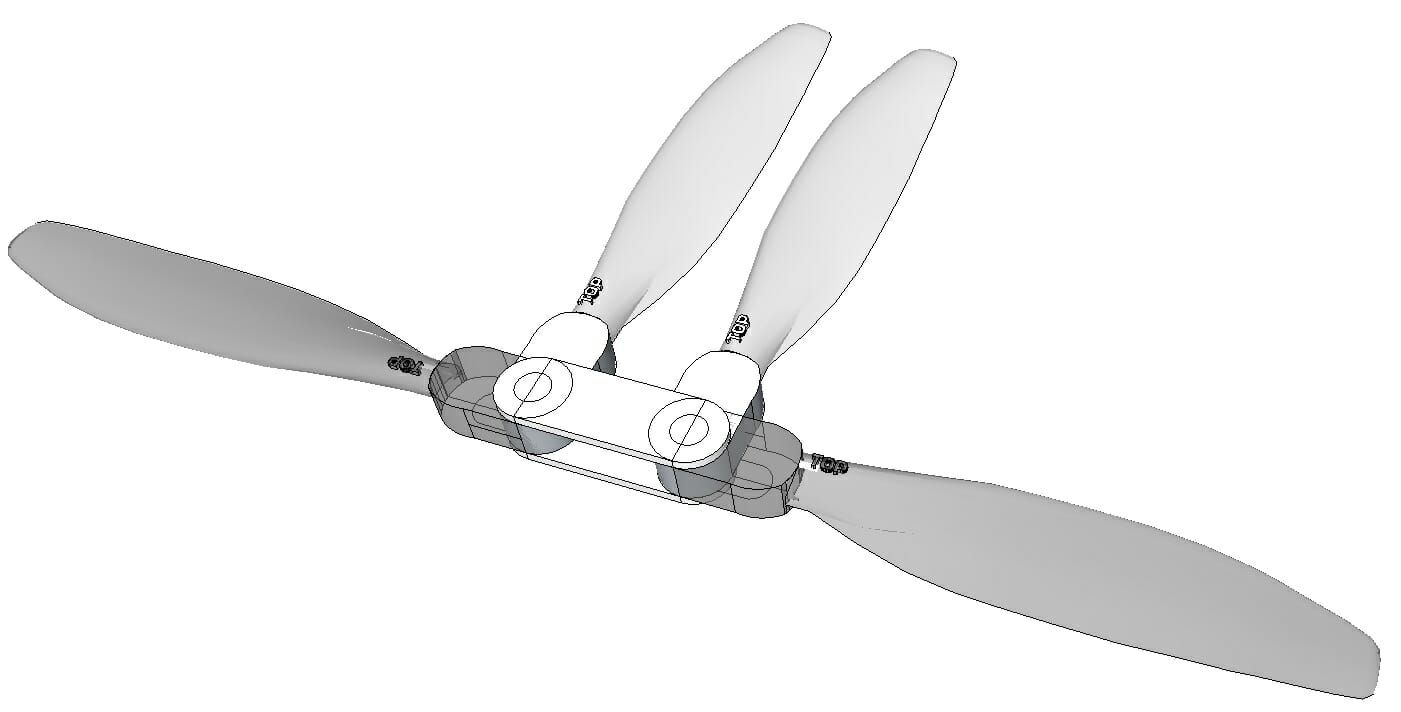
تاشونده
پایه های تاشو دارای یک قسمت مرکزی هستند که به دو تیغه گردان متصل می شوند. هنگامی که مرکز (که به محور خروجی موتور متصل است) می چرخد ، نیروهای گریز از مرکز روی تیغه ها عمل می کنند و آنها را به سمت بیرون رانده و در اصل پروانه را "سفت" می کنند ، با همان تأثیر یک پروانه کلاسیک غیر تاشو. به دلیل تقاضای کم و تعداد زیاد قطعات مورد نیاز ، پروانه های تاشو کمتر رایج هستند. مزیت اصلی صندلی های تاشو جمع و جور است و در ترکیب با قاب تاشو ، ابعاد حمل و نقل هواپیمای بدون سرنشین می تواند به طور قابل توجهی کوچکتر از ابعاد پرواز باشد. مزیت همزمان مکانیسم تاشو عدم نیاز است ، در صورت خرابی ، برای تغییر کامل پروانه ، فقط جایگزین تیغه آسیب دیده کافی خواهد بود.
نصب
مانند پهپادها ، روتورها می توانند طیف وسیعی از اندازه ها را داشته باشند. بنابراین ، تعدادی قطر "استاندارد" محور موتور در صنعت وجود دارد. در این رابطه ، روتور اصلی اغلب با یک مجموعه کوچک از حلقه های آداپتور عرضه می شود (آنها شبیه واشرهایی با سوراخ هایی با قطرهای مختلف در مرکز هستند) ، که در حفره مرکزی پروپیله
پیچ را می توان به موتور ثابت کرد که بر اساس آن روش نصب توسط موتور شما پشتیبانی می شود. اگر شفت موتور دلالت بر هیچ گزینه چفت و بست (اتصال نخ ، دستگاه های مختلف چفت و بست و غیره) ندارد ، از آداپتورهای خاصی مانند محافظ های محافظ و گیره های کولت استفاده می شود.
- Propsaver
- Collet chuck
موتورهای بدون برس با روتور خارجی (نوع "Outrunner") ، به عنوان یک قاعده ، در قسمت بالایی آن چندین سوراخ رزوه داریک گزینه محبوب برای اتصال پروانه به محور موتور BC است
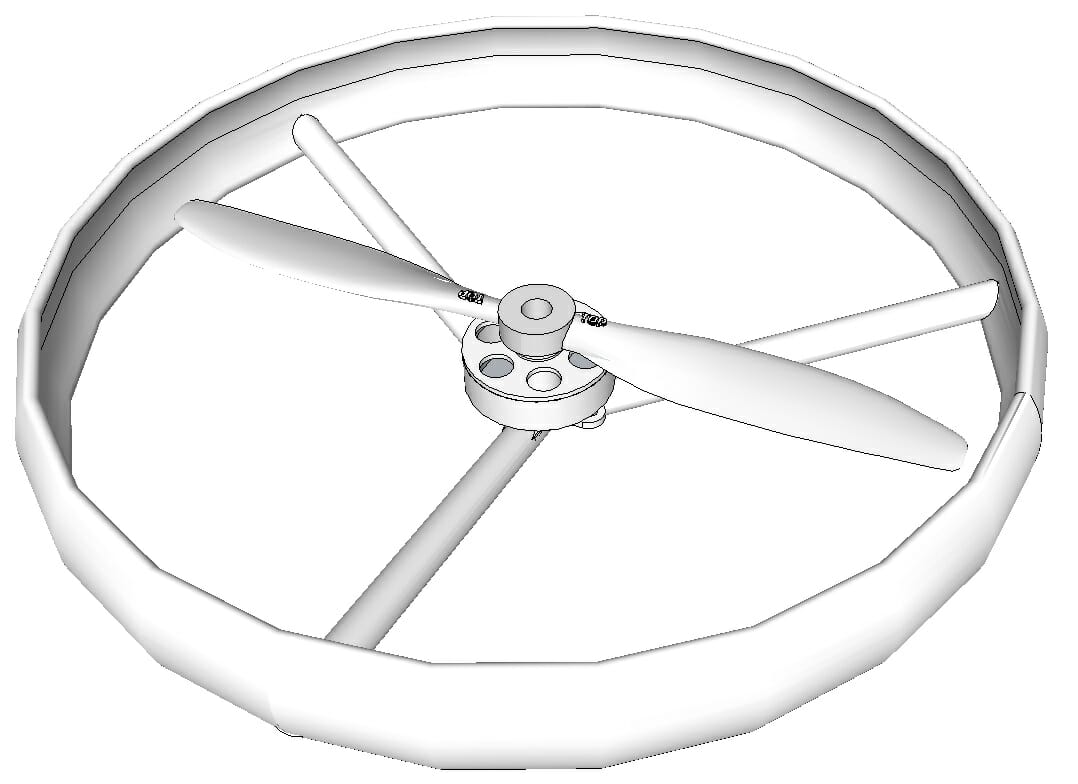
حفاظت از روتورها
حفاظت از روتورها - طراحی شده برای جلوگیری از تماس مستقیم نیروگاه پهپاد با یک شیء پیش رو ، در نتیجه حفظ یکپارچگی و عملکرد آن ، و همچنین برای جلوگیری از صدمه به پروانه های سریع چرخان در نتیجه برخورد با مردم و حیوانات. محافظ های پروانه به قاب اصلی متصل شده اند. بسته به نسخه ، می تواند تا حدی با منطقه کارخانه نیروگاه همپوشانی داشته باشد یا به طور کامل (محافظت از حلقه). حفاظت از ملخ بیشتر در پهپادهای کوچک (اسباب بازی) استفاده می شود. استفاده از عناصر محافظتی در مجموعه نیز مصالح زیادی را به همراه دارد ، از جمله:
- ممکن است باعث ارتعاش بیش از حد شود.
- عموماً ضربات سبک را تحمل می کند.
- در صورت قرار دادن بیش از حد پایه های نصب کننده در زیر پروانه ، ممکن است رانش را کاهش دهد.
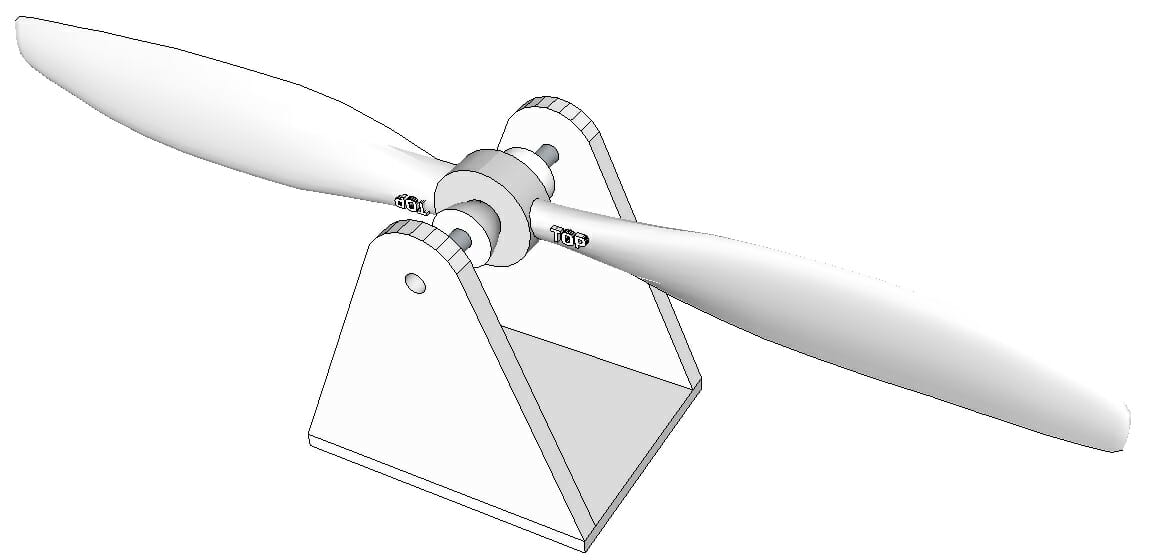
متعادل سازی
متعادل سازی ضعیف در بیشتر پروانه های ارزان قیمت رخ می دهد. برای اطمینان از این امر ، نیازی نیست راه زیادی را طی کنید ، فقط یک مداد را در سوراخ مرکزی پیچ وارد کنید (به عنوان یک قاعده ، با عدم تعادل ، یک طرف سنگین تر از طرف دیگر خواهد بود). بنابراین ، بسیار توصیه می شود که وسایل خود را قبل از نصب بر روی موتور متعادل کنید. یک پروانه نامتعادل باعث ارتعاشات بیش از حد می شود که به نوبه خود بر عملکرد کنترل کننده پرواز تأثیر منفی می گذارد (که در رفتار نادرست هواپیمای بدون سرنشین در پرواز نشان داده می شود) ، بدون توجه به افزایش سر و صدا ، افزایش سایش عناصر نیروگاه و خرابی در کیفیت عکاسی از دوربین معلق
پروانه را می توان با روش های مختلف متقابل دانست ، اما اگر از ابتدا یک هواپیمای بدون سرنشین می سازید ، باید در زرادخانه ابزارها وجود داشته باشد. موازنه پروانه ارزان قیمت که به شما امکان می دهد به راحتی و به سادگی عدم تعادل وزن را در پروانه تعیین کنید. برای برابری وزن ، می توانید سنگین ترین قسمت پروانه را آسیاب کنید (قسمت مرکزی تیغه به طور مساوی سنباده زده می شود و به هیچ وجه قسمت پروانه را قطع نمی کنید) ، همچنین می توانید با چسباندن یک تکه نوار (نازک) تعادل را برقرار کنید. روی تیغه فندک (قطعات را به طور مساوی اضافه کنید تا زمانی که به تعادل برسید). توجه داشته باشید که هر چه دورتر از مرکز ارتفاع (سنباده زنی یا اضافه کردن تسمه) پروانه را انجام دهید ، تأثیر بیشتر بر اساس اصل گشتاور بیشتر خواهد بود.
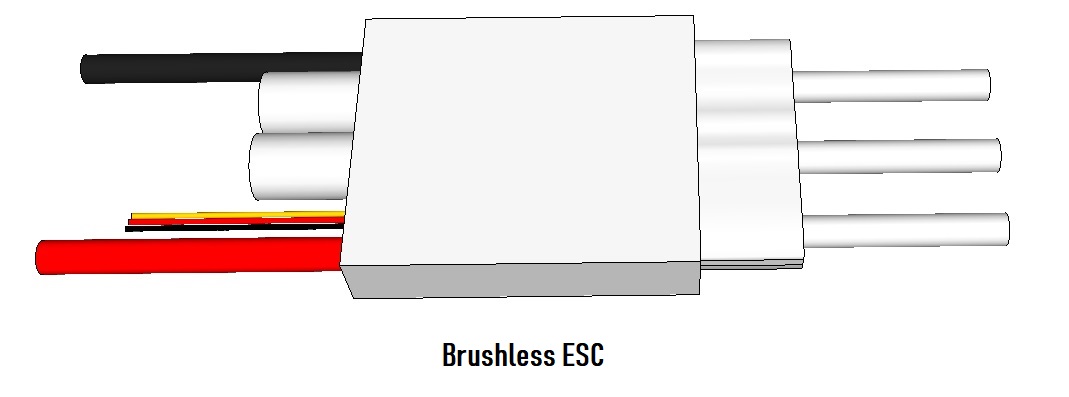
3. ESC
ESC (کنترل کننده الکترونیکی سرعت الکترونیکی انگلیسی ؛ rus.کنترل کننده الکترونیکی سرعت) - به کنترل کننده پرواز اجازه می دهد سرعت و جهت موتور را کنترل کند. با ولتاژ مناسب ، ESC باید بتواند حداکثر را تحمل کند. جریانی که موتور می تواند مصرف کند ، و همچنین جریان عبوری از فاز در هنگام سوئیچینگ را محدود می کند. بیشتر ESC های سرگرمی بدون سرنشین به موتور اجازه می دهند در یک جهت بچرخد ، اما با سیستم عامل صحیح می توانند در هر دو جهت کار کنند.
اتصال
در ابتدا ، ESC می تواند گیج کننده باشد زیرا چندین سیم / پین / کانکتور برای اتصال آن وجود دارد. طرفین (ESC می تواند با یا بدون اتصالات لحیم شده عرضه شود).
- منبع تغذیه: دو سیم ضخیم (معمولاً سیاه و قرمز) برای تأمین نیرو از صفحه توزیع / مهارهایی که مستقیماً از باتری اصلی هواپیما به آنها می آید ، ارائه شده است.
- 3 کانکتور: سه کانکتور در طرف مقابل کنترلر برای اتصال به سه کانکتور گلوله ای (معمولاً همراه موتورها) در موتور بدون برس وجود دارد. استفاده از اتصالات هنگام اتصال ESC به شما امکان می دهد ، در صورت لزوم (در صورت خرابی) ، کنترل کننده را بدون استفاده از لحیم کاری به سرعت تغییر دهید. این اتفاق می افتد که اتصالات گلوله ای شکل همراه موتور با اتصالات تنظیم کننده مطابقت ندارند ، در این صورت ، آنها را به سادگی با اتصالات مناسب جایگزین کنید. کدام یک از این سه "پلاس" و کدام "منهای" است؟ نقطه مرجع یک سیم مثبت ساده است که از باتری خارج می شود ، در ESC مثبت می شود ، مشابه با یک منفی.
- اتصال دهنده سروو 3 پین R / C با سیمهای نازک: که از طریق آن سیگنال دریافتی از گیرنده پردازش می شود ، که یک سیم آن سیگنال است (انتقال سیگنال گاز به ESC یا ورودی) ، دومین "منفی" (یا زمین) ، و یک سیم مثبت (در صورت عدم وجود BEC داخلی استفاده نمی شود ؛ با BEC داخلی ، خروجی قدرت 5 ولت است که بعداً می توان از آن برای تغذیه استفاده کرد) لوازم الکترونیکی روی صفحه)
BEC
در روزهای اولیه مدلسازی هواپیما ، از موتور احتراق داخلی به عنوان نیروگاه استفاده می شد و وسایل الکترونیکی روی آن توسط یک موتور کوچک تغذیه می شد. باتری با ظهور کشش و کنترل کننده های الکتریکی (ESC) ، در مورد دوم ، آنها شروع به وارد کردن مدار به اصطلاح حذف باتری کردند-BEC (به انگلیسی. Battery Eliminator Circuit ؛ یا مبدل قدرت داخلی) ، به عنوان یک قاعده ، یک منبع جریان اضافی با ولتاژ 5V در جریان 1A یا بالاتر). به عبارت دیگر ، این یک مبدل ولتاژ است که در مجموعه LiPo به ولتاژ برای تغذیه قطعات الکترونیکی هواپیمای بدون سرنشین استفاده می شود.
هنگام مونتاژ چند موتوره ، همه ESC ها باید به کنترل کننده پرواز متصل شوند ، اما فقط یک BEC مورد نیاز است ، در غیر این صورت هنگام تغذیه خطوط مشابه ممکن است مشکلاتی ایجاد شود. از آنجا که معمولاً راهی برای غیرفعال کردن BEC در ESC وجود ندارد ، بهتر است سیم قرمز () را بردارید و آن را با نوار چسب برای همه ESC ها به جز یک بپیچید.همچنین مهم است که سیم سیاه (زمین) را برای زمینه های مشترک رها کنید.
سیستم عامل
همه ESC های موجود در بازار برای کاربردهای چند روتور به یک اندازه خوب نیستند. درک این نکته مهم است که قبل از ظهور پهپادهای چند موتوره ، موتورهای بدون برس عمدتا به عنوان نیروگاه اتومبیل های رادیویی ، هواپیماها و هلیکوپترها استفاده می شد. اکثر آنها نیاز به زمان پاسخ سریع یا به روز رسانی ندارند. ESC ها با نرم افزار جاسازی شده SimonK یا BLHeli قادرند خیلی سریع به تغییرات ورودی واکنش نشان دهند ، که به طور کلی تفاوت بین پرواز یا سقوط پایدار را ایجاد می کند.
توزیع قدرت
از آنجا که هر ESC توسط باتری اصلی تغذیه می شود ، اتصال باتری اصلی باید به نحوی به چهار ESC تقسیم شود. این کار با استفاده از Board Distribution BoardPower Distribution Harnessدینز
4. باتری
شیمی
باتری های مورد استفاده در هواپیماهای بدون سرنشین در حال حاضر منحصراً پلیمر لیتیوم (LiPo) هستند و ترکیب برخی از آنها کاملاً عجیب و غریب است - لیتیوم منگنز یا لیتیوم دیگر انواع اسید سرب به سادگی مناسب نیست و NiMh / NiCd هنوز برای ظرفیت خود بسیار سنگین است و اغلب نمی تواند نرخ تخلیه بالا مورد نیاز را تحویل دهد. LiPo عملکرد بالا و میزان تخلیه را با وزن کم ارائه می دهد. معایب آن هزینه نسبتاً بالا و مشکلات ایمنی ثابت (خطر آتش سوزی) است.
ولتاژ
در عمل ، شما فقط به یک باتری برای پهپاد خود نیاز دارید. ولتاژ این باتری باید با موتورهای BK که انتخاب کرده اید مطابقت داشته باشد. تقریباً تمام باتری های مورد استفاده امروزه بر پایه لیتیوم هستند و دارای چندین سلول (قوطی) هرکدام 3.7 ولت هستند که در آن 3.7 ولت = 1 ثانیه (یعنی باتری یک قوطی ؛ 2 اس دو قوطی و غیره است). بنابراین ، یک باتری با برچسب 4S به احتمال زیاد دارای ارزش اسمی 4 × 3.7 ولت = 14.8 ولت است. همچنین تعداد قوطی ها به شما کمک می کند که از کدام شارژر استفاده کنید. توجه داشته باشید که یک باتری تک سلولی با ظرفیت بالا ممکن است از نظر فیزیکی شبیه به یک باتری چند سلولی با ظرفیت کم باشد.
ظرفیت
ظرفیت باتری بر حسب آمپر ساعت (Ah) اندازه گیری می شود.باتری های کوچک می توانند دارای ظرفیت 0.1Ah (100mAh) باشند ، ظرفیت باتری برای هواپیماهای بدون سرنشین متوسط می تواند از 2-3Ah (2000mAh-3000mAh) متغیر باشد. هرچه ظرفیت بیشتر باشد ، زمان پرواز طولانی تر است و بر این اساس ، باتری سنگین تر است. زمان پرواز یک پهپاد معمولی می تواند بین 10 تا 20 دقیقه باشد ، که ممکن است کوتاه مدت به نظر برسد ، اما باید بدانید که هواپیمای بدون سرنشین در طول پرواز دائماً با گرانش دست و پنجه نرم می کند و برخلاف هواپیما ، سطحی ندارد (بال) که به شکل نیروی بالابری بهینه کمک می کند.
میزان تخلیه
میزان تخلیه باتری لیتیوم در "C" اندازه گیری می شود که در آن 1C ظرفیت باتری است (معمولاً در ساعت آمپر ، مگر اینکه در نظر بگیرید یک هواپیمای بدون سرنشین به اندازه نخل). میزان تخلیه اکثر باتری های LiPo حداقل 5 درجه سانتیگراد (پنج برابر ظرفیت) است ، اما از آنجایی که اکثر موتورهای مورد استفاده در پهپادهای چند روتور جریان زیادی مصرف می کنند ، باتری باید بتواند در یک جریان فوق العاده بالا ، که معمولاً تخلیه می شود ، تخلیه شود. حدود 30A یا بیشتر
ایمنی
باتری های LiPo کاملاً ایمن نیستند زیرا حاوی گاز هیدروژن تحت فشار هستند و تمایل دارند هنگام سوختن و یا منفجر شدن هر چیزی چیزی اشتباه است بنابراین ، اگر در مورد سلامت باتری شک دارید ، به هیچ وجه آن را به هواپیمای بدون سرنشین یا حتی به شارژر وصل نکنید - آن را "از کار افتاده" در نظر بگیرید و آن را به درستی دفع کنید. علائم گویای این که مشکلی در باتری وجود دارد ، فرورفتگی یا تورم (یعنی نشت گاز) است. هنگام شارژ باتری LiPo ، بهتر است از صندوق امانات LiPo (صندوق امانات باتری) استفاده کنید. ذخیره سازی باتری

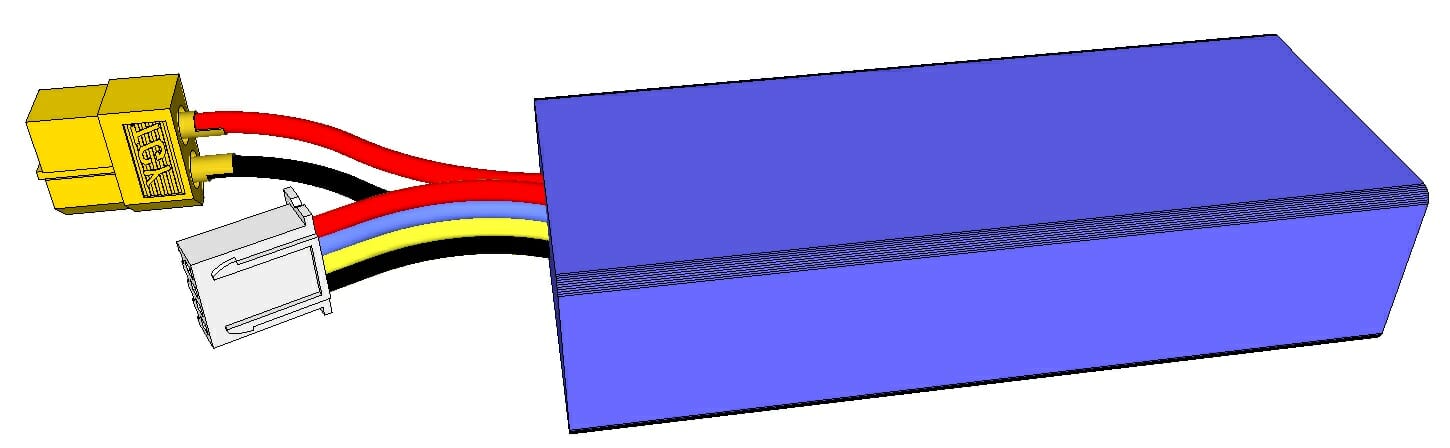
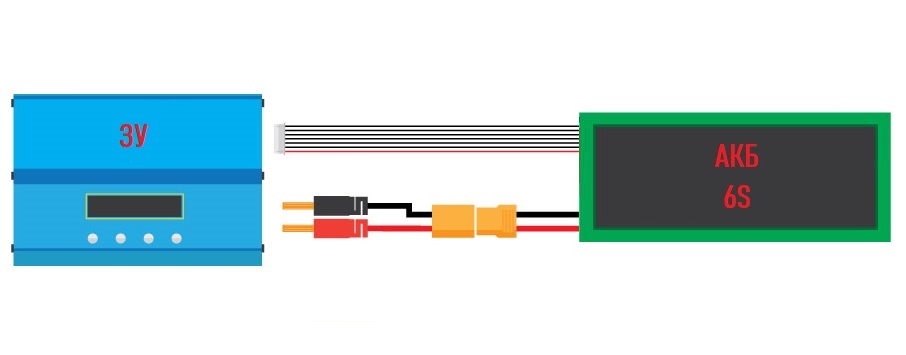
شارژ
اکثر باتری های LiPo دارای دو اتصالشارژرنگرانی های ایمنی مربوط به باتری های لیتیوم پلیمر را در نظر داشته باشد
.نصب
باتری سنگین ترین عنصر هواپیمای بدون سرنشین است ، بنابراین برای اطمینان از آن باید در مرکز مرده مرکزی نصب شود بار مشابه بر روی موتورها باتری هیچگونه نصب خاصی را شامل نمی شود (مخصوصاً پیچ هایی که می توانند به LiPo آسیب برسانند و باعث آتش سوزی شوند) ، بنابراین برخی از روشهای نصب که امروزه استفاده می شود شامل بندهای Velcro ، لاستیک ، محفظه های پلاستیکی و موارد دیگر است. متداول ترین گزینه نصب باتری این است که باتری را با استفاده از بند Velcro زیر قاب آویزان کنید.







