مطالب
مقدمه
شش درس اول ملاحظات طراحی ایجاد یک پهپاد / پهپاد اختصاصی چند موتوره را مورد بررسی قرار می دهد. درس 7 جنبه های مونتاژ را پوشش نمی دهد ، اما تعدادی از لوازم جانبی / دستگاه های اضافی مورد استفاده برای اجرای پرواز اول شخص (FPV) و کنترل برد دور را شرح می دهد. این مقاله بیشتر بر استفاده از کنترل رادیویی در "زمینه" تمرکز دارد. برخلاف پرواز در داخل خانه یا مکانهایی که پریزها می توانند برق را تأمین کنند. لطفاً توجه داشته باشید ، این آموزش فقط بخش کوچکی از اطلاعات مورد نیاز برای درک صحیح سیستم های FPV / برد طولانی را پوشش می دهد و عمدتا برای آشنایی خوانندگان با مفاهیم ، اصطلاحات ، محصولات و اصول پشت FPV و کنترل پهپاد دوربرد است.
نمای اول شخص (FPV)
نمای اول شخص (FPV) یکی از نیروهای محرک اصلی پشت محبوبیت رو به رشد پهپادهای چند موتوره است که به شما امکان می دهد دیدگاه کاملاً متفاوت ("نمای پرنده") سیاره ما و احساس پرواز. در حالی که افزودن دوربین به پهپاد چیز جدیدی نیست ، سهولت کنترل نسبی ، قیمت پایین و طیف وسیعی از هواپیماهای بدون سرنشین خرید یا ساخت پهپاد با دوربین را آسان می کند.
نمای اول شخص (FPV) در حال حاضر با استفاده از پشت سر هم نصب شده در هواپیما ، متشکل از یک دوربین FPV و یک فرستنده ویدئو ، که به شما امکان می دهد فیلم را در زمان واقعی برای خلبان یا دستیار ارسال کنید ، اجرا می شود. به لطفاً توجه داشته باشید که سیستم های FPV آماده یا نیمه تمام در بازار وجود دارد ، که به نوبه خود ، سیستم های FPV آماده به کاربر اطمینان می دهد که همه عناصر آن با یکدیگر سازگار هستند.
دوربین فیلمبرداری
- تقریباً هر دوربین فیلمبرداری که قابلیت اتصال به فرستنده ویدئو را دارد می تواند مورد استفاده قرار گیرد. پرواز FPV را انجام دهید ، بنابراین وزن باید در نظر گرفته شود ، زیرا پهپادهای چند موتوره دائماً با گرانش دست و پنجه نرم می کنند و فاقد مزایای یک هواپیمای بالدار برای ارائه بالابر اضافی هستند.
- دوربین های فیلمبرداری دارای اشکال و اندازه های بسیار متنوعی هستند و همچنین می توانند پتانسیل متفاوتی در کیفیت فیلمبرداری داشته باشند ، با این حال ، در حال حاضر ، تعداد بسیار کمی به طور خاص برای پهپادها اقتباس شده است.با توجه به این محدودیت ها در اندازه ، وزن و عملکرد ، بیشتر دوربین های مورد استفاده در سیستم های FPV چند موتوره از "دوربین های اکشن" و همچنین از دوربین های مدار بسته و برنامه های امنیتی (به عنوان مثال دوربین های مخفی) تهیه می شوند.
- دوربین های بزرگ مانند DSLR (SLR) یا دوربین های فیلمبرداری بزرگ معمولاً توسط متخصصان استفاده می شود ، اما به دلیل وزن آنها ، پهپاد مورد نیاز معمولا بزرگ است.
- برخی از دوربین های فیلمبرداری را می توان مستقیماً از منبع تغذیه 5 ولت تغذیه کرد (مفید است زیرا اکثر کنترل کننده های پرواز نیز در صورت تغذیه با BEC در 5 ولت کار می کنند) ، در حالی که برخی دیگر ممکن است به 12 ولت یا حتی باتری قابل شارژ داخلی خود نیاز داشته باشند.
- محبوب ترین دوربینی که در حال حاضر در پهپادهای چند موتوره استفاده می شود ، GoPro است. این به دلیل دوام ، اندازه کوچک ، کیفیت بالای فیلم / عکس ، باتری داخلی ، طیف گسترده ای از لوازم جانبی و در دسترس بودن در سراسر جهان است. دوربین های GoPro همچنین دارای خروجی USB هستند که می توان از آنها برای انتقال ویدئو استفاده کرد و حتی برخی از آنها دارای WiFi داخلی برای انتقال ویدئو در فاصله کوتاه هستند.
- با توجه به موفقیت GoPro ، بسیاری از تولید کنندگان دیگر خط تولید دوربین های ورزشی / اکشن مشابه خود را ایجاد کرده اند ، اما مشخصات ، قیمت و کیفیت متفاوت است. لطفاً توجه داشته باشید که در صورت نیاز به فیلم سه بعدی ، به دو دوربین و VTX با قابلیت انتقال دو سیگنال نیاز دارید.

گیمبال
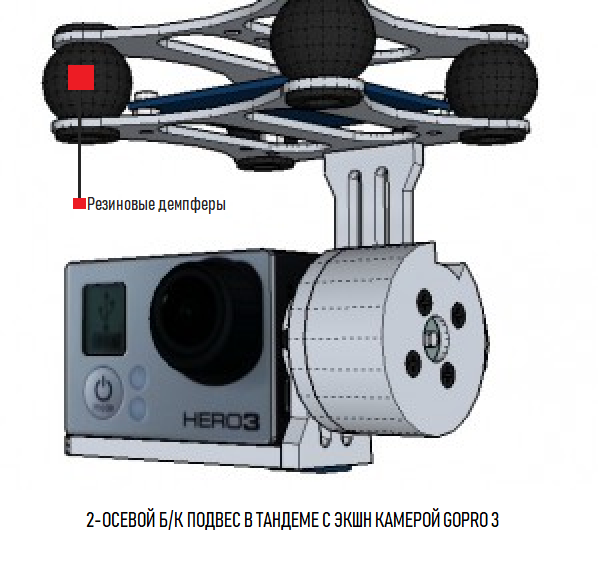
گیمبال شامل یک قاب مکانیکی ، دو یا چند موتور (معمولاً تا سه مورد برای حرکت ، شیب و رول) ، و همچنین سنسورها و وسایل الکترونیکی. دوربین به گونه ای نصب شده است که موتورها نیازی به ایجاد نیروی زاویه ای (گشتاور) برای نگه داشتن دوربین در زاویه ثابت ("متعادل") ندارند.
محورهای مورد نظر به شما امکان می دهد دوربین را بچرخانید ، کج کنید یا بچرخانید. یک سیستم 1 محوری که سنسور خاص خود را ندارد می توان به عنوان یک سیستم پان یا کج در نظر گرفت. محبوب ترین طراحی شامل یک موتور دوگانه (معمولاً موتورهای BLDC مخصوص استفاده برای گیمبال ها) است که شیب و حرکت دوربین را کنترل می کند. در نتیجه ، دوربین همیشه رو به جلوی هواپیمای بدون سرنشین است ، این امر همچنین تضمین می کند که اگر دوربین در یک جهت و جلوی هواپیمای بدون سرنشین در جهت دیگر قرار گرفته باشد ، خلبان گم نمی شود.
گیمبال 3 محوره panning (چپ و راست) را اضافه می کند و بیشتر در کنار دو اپراتور مفید است ، جایی که یک نفر هواپیمای بدون سرنشین را اداره می کند و دیگری می تواند به طور مستقل دوربین را کنترل کند. در این پیکربندی دو نفره ، می توان از دوربین FPV دوم (ثابت) برای خلبان استفاده کرد.به طور معمول ، یکی از دو نوع سیستم گیمبال وجود دارد:
گیمبال بدون برس
- موتور جریان مستقیم براشلس (BLDC) یا موتور سنکرون مغناطیسی دائمی (PMSM) یا (شیرهای موتور (VD)) - پاسخ سریع را با حداقل ارتعاش ارائه می دهد ، اما به کنترل کننده DC جداگانه (و اختصاصی) بدون برس نیاز دارد.
- برای حفظ خودکار سطح دوربین ، یک واحد اندازه گیری اینرسی (IMU) ، متشکل از شتاب سنج و ژیروسکوپ ، در جایی در اطراف دوربین (معمولاً زیر پایه دوربین) نصب شده است تا موقعیت دوربین دوربین (نسبت به زمین) قابل ردیابی است. خوانش های بلوک به یک برد کنترل کننده براشلس جداگانه DC (اغلب مستقیماً بالای گیمبال نصب می شود) ارسال می شود که موتورها را می چرخاند تا دوربین با وجود هرگونه حرکت پهپاد در جهت مشخصی بماند.
- برد کنترل خود شامل یک میکروکنترلر تعبیه شده است. کنترل کننده DC بدون جاروبک گیمبال معمولاً می تواند مستقیماً به کانال گیرنده (برخلاف کنترل کننده پرواز) متصل شود ، زیرا به تغییرات جهت دوربین ، نه جهت پهپاد پاسخ می دهد و بنابراین به کنترل کننده پرواز بستگی ندارد.
- لطفاً توجه داشته باشید که از آنجا که GoPro یک دوربین اکشن محبوب است ، اکثر جیمبال های بدون برس برای استفاده با یک یا چند مدل GoPro طراحی شده اند (بر اساس اندازه GoPro ، مرکز ثقل ، محل دوربین و غیره). همچنین متوجه خواهید شد که عضلات BLDC تقریباً همیشه دارای میرایی هستند که ارتعاشات منتقل شده از هواپیمای بدون سرنشین به دوربین را به حداقل می رساند.
RC servo gimbal
- در قلب سرو گیمبال RC - سروو درایوها زمان پاسخگویی کندتری نسبت به بدون برس دارند گیمبال و ارتعاش بیش از حد در عین حال ، سیستم های سرو بسیار ارزان تر از سیستم های بدون برس هستند و سروهای 3 پین در اکثر موارد می توانند مستقیماً به کنترل کننده پرواز متصل شوند ، که به شما امکان می دهد از IMU داخلی در رایانه برای تعیین سطح نسبت به زمین ، و سپس سروها را حرکت دهید.

فرستنده ویدئو (VTX)
) دارای VTX داخلی هستند ، به این معنی که یک مقاوم سازی جداگانه VTX معمولاً مورد نیاز است VTX های مورد استفاده در سرگرمی هواپیماهای بدون سرنشین امروزه به دلیل سبک و کوچک بودن محبوب هستند. از VTX های شخص ثالث می توان استفاده کرد ، اما در این مورد برخی از ملاحظات مربوط به اتصال برق مهم است که باید در نظر گرفته شوند (ممکن است نیاز به پیکربندی داشته باشد اگر دستگاه فقط از اتصال "Barrel" نیرو می گیرد) و ولتاژ ورودی. اگر دستگاه ویدئویی با ولتاژی کار می کند که در ساخت شما نیست ، ممکن است به لوازم الکترونیکی اضافی مانند تنظیم کننده ولتاژ نیاز داشته باشید. VTX هایی که بر سرگرمی هواپیماهای بدون سرنشین تأثیر نمی گذارند به ندرت از نظر وزن یا اندازه رضایت بخش هستند و معمولاً در یک قاب محافظ (و گاهی اوقات غیر ضروری سنگین) قرار می گیرند.
قدرت VTX
VTX عموماً برای یک قدرت خروجی خاص درجه بندی می شود ، اما نباید تصور کرد که هرکسی می تواند از هر گونه قدرت موجود در بازار استفاده کند به فرکانس ها و قدرت بی سیم با دقت کنترل و تنظیم می شوند ، بنابراین توصیه می شود که قوانین بی سیم را در کشوری که در آن قرار دارید بررسی کنید.
توان مصرفی یک VTX مستقیماً بر حداکثر دامنه سیگنالهای آن تأثیر می گذارد. در آمریکای شمالی ، یک فرستنده بی سیم که بیش از یک قدرت مشخص (بر حسب وات) مصرف می کند ، نیاز به یک اپراتور دارد که از یک اپراتور رادیویی آماتور (HAM) مجوز فعالیت داشته باشد. به عنوان مثال ، در کانادا ، معمولاً یک اپراتور FPV دوربرد باید حداقل یک تست مهارت اولیه رادیو آماتور را بگذراند تا با توان مورد نیاز برای برنامه های بی سیم دور برد کار کند.
اگر واجد شرایط نیستید ، اکیداً توصیه می شود از فرستنده ویدئویی کمتر از 200 مگاوات برای جلوگیری از خطر اقدامات قانونی استفاده کنید (اگر سیگنال شما با سایر سیگنال های بی سیم تداخل داشته باشد ، مقامات ممکن است با شما تماس بگیرند).
برق VTX معمولاً توسط BEC از یکی از ESC ها تأمین می شود ، که بقیه لوازم الکترونیکی را نیز تامین می کند. اگر گمان می کنید که تمام قطعات الکترونیکی بیش از یک BEC جریان دارند ، می توانید از BEC از ESC دوم برای تغذیه VTX استفاده کنید. استفاده از باتری جداگانه برای تغذیه VTX توصیه نمی شود.
فرکانس ها / کانال های VTX
اکثر VTX ها در یکی از فرکانس های ذکر شده در زیر عمل می کنند. لطفاً توجه داشته باشید که از آنجا که احتمالاً قبلاً از تجهیزات کنترل استاندارد استفاده می کنید که با فرکانس خاصی کار می کنند ، عاقلانه است که VTX را انتخاب کنید تا فرکانس ها مطابقت نداشته باشند. به عنوان مثال ، اگر کنترل از راه دور شما با فرکانس 2.4 گیگاهرتز کار می کند ، باید به دنبال VTX با فرکانس کاری 900 مگاهرتز ، 1.2 گیگاهرتز یا 5.8 گیگاهرتز باشید.
900MHz (0.9GHz)
- سیگنالهای فرکانس پایین به راحتی می توانند به دیوارها و درختان نفوذ کنند
- آنتن های DIY به راحتی بسازید زیرا فرکانسهای پایین دلالت بر آنتنهای بزرگ دارد
- کیفیت تصویر به خوبی 5.8 گیگاهرتز نیست
- ممکن است تأثیر منفی بر روی گیرنده های GPS داشته باشد
- به عنوان فناوری "قدیمی" در نظر گرفته شده است
- به طور کلی برای میان برد
1.2 گیگاهرتز (1.2 تا 1.3 گیگاهرتز)
- برای پروازهای طولانی مدت FPV استفاده می شود زیرا مسافت خوبی را ارائه می دهد
- بسیاری از آنتن های مختلف در بازار
- فرکانس که معمولاً توسط بسیاری از دستگاه های دیگر استفاده می شود
- دیوارها و موانع تأثیر بیشتری نسبت به فرکانس پایین تر دارند
- برد متوسط / طولانی
2.4GHz (2.3 تا 2.4GHz)
- برای FPV در مسافت های طولانی با موانع اندک استفاده می شود
- یکی از پرکاربردترین فرکانس ها برای برای دستگاه های بی سیم
- بسیاری از لوازم جانبی موجود است (آنتن ، فرستنده و غیره)
- از فرستنده های RC موازی نزدیک یا سایر دستگاه هایی که ممکن است باعث ایجاد تداخل شوند ، استفاده نکنید.
- ممکن است با فرکانس های دیگر کار کند ، اما در این بخش پوشش داده نمی شود.
5.8 گیگاهرتز
- برای برنامه های کوتاه برد مناسب است
- دیوارها و موانع دیگر تأثیر قابل توجهی بر برد دارند
- آنتن های کوچک / فشرده
- بهترین برای FPV در مسابقه هواپیماهای بدون سرنشین
همانطور که متوجه شده اید ، بسیاری از دستگاه های بی سیم معمولی با فرکانس 2.4 گیگاهرتز کار می کنند (روترهای بی سیم ، تلفن های بی سیم ، بلوتوث ، بازکن درهای گاراژ و غیره). این عمدتا به این دلیل است که مقررات ایالتی FCC ، مشخص شده است که محدوده فرکانس در این محدوده نیازی به مجوز برای فعالیت ندارد. یکسان برای 900 مگاهرتز ، 1.2 گیگاهرتز و 5.8 گیگاهرتز (در محدوده توان مشخص شده). محدوده فرکانس بدون مجوز شامل محدوده اصطلاحاً ISM رایگان (از محدوده انگلیسی صنعتی ، علمی ، پزشکی: صنعتی ، علمی و پزشکی) است ، و باند فرکانس را اشغال می کند: از 2400 تا 2483.5 مگاهرتز در ایالات متحده و اروپا و از 2471 تا 2497 مگاهرتز در ژاپن این بدان معناست که هر مصرف کننده می تواند بدون نگرانی از مقررات یا دستورالعمل ها ، دستگاه بی سیم را که در یکی از این فرکانس ها کار می کند خریداری کند. اطلاعات بیشتر در مورد تخصیص فرکانس رادیویی آماتور را می توانید در ویکی پدیا پیدا کنید.
اتصالات VTX
همه VTX کانکتورهای یکسانی ندارند ، بنابراین مهم است که بدانید کدام کانکتور در دوربین انتخاب شده نصب شده است و همچنین ببینید آیا امکان اتصال و کار با آن وجود دارد VTX انتخاب شده متداول ترین کانکتورها کانکتور ، مینی / میکرو USB و کانکتورهای 0.1 اینچی (آنالوگ) هستند. تعدادی آداپتور / آداپتور در بازار وجود دارد ، به عنوان مثال: 0.1 ″ FPV Tx connector - miniUSB برای استفاده با دوربین GoPro ، که استفاده از چنین محصولاتی را بسیار ساده می کند.
برخی از VTX ها ممکن است دارای ورودی صوتی نیز باشند ، اما در بیشتر موارد سر و صدای ناشی از پیشرانه هر صدایی را که امیدوار هستید ضبط کند ، از بین می برد. اگر به صدا احتیاج دارید ، حتماً میکروفون را تا آنجا که ممکن است از موتورها دورتر قرار دهید (برای یافتن حداکثر مکان بهینه آزمایشات زیادی لازم است) و گیرنده سازگار را انتخاب کنید.
آنتن VTX
آنتن های VTX مورد استفاده در هواپیماهای بدون سرنشین معمولاً "اردک" یا "شلاق" هستند. آنتن های اردک رایج ترین هستند و این مزیت را دارند که همه جهته ، جمع و جور ، ارزان قیمت بوده و در طول پرواز به دلیل مشخصات کوچک آنها ثابت بمانند.
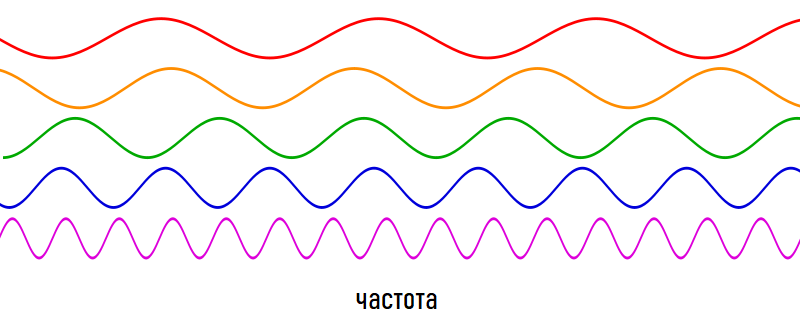
انتخاب آنتن باید با فرکانس VTX مطابقت داشته باشد. فرکانس های بالاتر به آنتن های کوچکتری نیاز دارند ، اما سیگنال های منتقل شده در عبور از موانع مشکل بیشتری دارند. فرکانسهای پایین کمتر مستعد تداخل هستند ، اما به آنتنهای بزرگ / طولانی نیاز دارند. آنتن جهت دار اغلب برای انتقال ویدئو استفاده نمی شود ، زیرا پهپاد در واقع می تواند در هر جهت در فضای سه بعدی باشد. در حالت ایده آل ، آنتن باید در جایی در UAV قرار داشته باشد ، جایی که هیچ منبع سیگنال بی سیم دیگر یا تداخل الکتریکی وجود ندارد.
گیرنده ویدئو (VRX)
گیرنده ویدئو تمایل دارد کمی (از نظر فیزیکی) بزرگتر و سنگین تر از VTX باشد زیرا گیرنده معمولاً ثابت است (به صفحه نمایش متصل است) در حالی که فرستنده بر روی هواپیمای بدون سرنشین نصب شده است و بنابراین ، باید کوچک و سبک باشد. برای صرفه جویی در فضا ، برخی از تولید کنندگان صفحه نمایش LCD گیرنده های بی سیم فرکانس استاندارد را در نمایشگرهای خود قرار می دهند.
بسیاری از علاقه مندان به FPV بر روی عینک FPV خود از آنتن های Clover Leaf یا Pinwheel استفاده می کنند که به آنها امکان می دهد سر خود را در جهت هواپیمای بدون سرنشین جهت افزایش قدرت سیگنال قرار دهند. برخی از تولید کنندگان عینک FPV نیز از این روند حمایت کرده و شروع به قرار دادن گیرنده و آنتن ویدئویی بی سیم در بسته عینک خود کرده اند.
بدیهی است که فرکانسی که گیرنده ویدئو کار می کند باید با فرکانس فرستنده مطابقت داشته باشد. با این حال ، برخی از مدل های گیرنده ، طیف گسترده ای از کانال ها (یکی در یک زمان) را ارائه می دهند که آنها را با انواع VTX ها سازگار می کند. خروجی گیرنده ویدئو معمولاً کامپوزیتی (رایج ترین) یا HDMI است. نحوه اتصال به خروجی (نمایش ویدیو) بستگی به شما دارد و برخی از گزینه ها در زیر شرح داده شده است. تغذیه گیرنده در میدان همیشه شامل استفاده از باتری است که یا ولتاژ خروجی را مطابق با ولتاژ کار گیرنده ارائه می دهد ، یا باتری که برای تنظیم ولتاژ مورد نیاز به تنظیم کننده ولتاژ متصل است. توجه داشته باشید که هیچ گیرنده ویدئویی "برد بلند" وجود ندارد زیرا محدوده سیگنال بستگی به قدرت فرستنده و آنتن صحیح دارد.

آنتن گیرنده ویدئو
آنتن های مورد استفاده در گیرنده های ویدئویی می تواند همه جهته (قادر به دریافت سیگنال از هر جهت) یا جهت دار باشد به متداول ترین آنتن هایی که روی گیرنده ویدئو یافت می شود عبارتند از: آنتن اردک ، Cloverleaf / Pinwheel یا در موارد نادر ، جهت دار (به عنوان مثال "Yagi"). یک آنتن جهت دار تنها در صورتی مناسب خواهد بود که پهپاد در جهت مشخصی نسبت به اپراتور پرواز کند و پهپاد همیشه "در جلوی" آنتن باشد تا سیگنال را از دست ندهد. شرایط می تواند شامل کاوش در یک منطقه خاص (مانند یک میدان) یا منطقه ای باشد که از اپراتور فاصله دارد.

نمایش ویدئو
مانیتور LCD (مانیتور LCD)
- هنگام در نظر گرفتن یک مانیتور LCD ، مهم است که تفاوت بین مانیتور LCD رومیزی / کامپیوتر یا تلویزیون LCD را با دستگاهی که قابل حمل است ، بدانید. یک مانیتور تلویزیون / کامپیوتر تقریباً همیشه دارای یک کانکتور برق است که با کابل برق رایانه ای استاندارد سازگار است (مستقیماً جریان AC را جذب می کند) و استفاده از باتری را بسیار مشکل می کند. صفحه LCD / OLED ، که باید بیشتر قابل حمل باشد ، اغلب جریان DC را می گیرد و برای اتصال به برق (A / C) به ترانسفورماتور خارجی نیاز دارد.
- اندازه ، نرخ تازه سازی و کیفیت صفحه نمایش مورد استفاده برای برنامه های FPV از مانیتورهای کوچک با تصاویر دانه دار که چندین بار در ثانیه تازه می شوند ، تا نمایشگرهای بزرگ که وقتی با VTX و گیرنده صحیح ترکیب شوند ، متغیر است. نمایش تصاویر بزرگ HD بدون هیچ گونه تاخیر ظاهری. به خاطر داشته باشید که هر صفحه نمایش دو بعدی که انتخاب می کنید باید به منبع تغذیه متصل و نصب شود ، یا در داخل ایستگاه پایه UAV (در زیر توضیح داده شده است) یا با اتصال مانیتور FPV به تجهیزات کنترل.
عینک های FPV
- عینک های دوبعدی
- کیفیت فیلم ارائه شده توسط عینک های ارزان قیمت FPV می تواند بسیار پایین باشد ، بنابراین اگر بودجه اهمیت دارد ، در نظر بگیرید که می توانید تجربه بهتری از یک مانیتور LCD بزرگتر با همان قیمت عینک FPV کسب کنید....
ردیابی سر
- ردیابی سر در اصل همان ردیابی حرکت است ، یعنی اندازه گیری جهت / زاویه های سه بعدی در مقابل حرکت خطی به مجموعه حسگرها شامل تراشه های MEMS شتاب سنج ، ژیروسکوپ یا واحدهای اندازه گیری اینرسی (IMU) است.سنسورها بر روی عینک FPV / VR نصب شده (یا در آنها تعبیه شده است) و داده ها را به میکروکنترلر ارسال می کند تا داده های سنسور را به صورت زاویه تفسیر کند ، که سپس داده ها را از طریق تجهیزات کنترل (برای مدل های رده بالاتر) یا از طریق فرستنده بی سیم جداگانه ارسال می کند. به سیستم ایده آل رهگیری سر با فرستنده سازگار است ، بنابراین زاویه ها را می توان با فرستنده در دو کانال RC رایگان ارسال کرد.
3D / واقعیت مجازی
- Occulus Rift ، Samsung Gear ، Morpheus ، عینک VR مبتنی بر تلفن هوشمند و بسیاری دیگر از 3D / Head نمایشگرهای VR نصب شده را می توان برای استفاده با هواپیماهای بدون سرنشین تطبیق داد. در حالی که این دستگاه ها معمولاً برای بازی های رایانه ای سه بعدی / کنسول یا جایگزینی برای تلویزیون ساخته می شوند ، این دستگاه ها بطور طبیعی با 3D سازگار هستند و اغلب دارای سنسورهای رهگیری سر هستند که برای جامعه FPV هواپیماهای بدون سرنشین جالب تر می شود.
دستگاه های هوشمند
- از تلفن های هوشمند ، رایانه لوحی یا لپ تاپ می توان برای نمایش ویدئوهای زنده استفاده کرد. باتری آنها داخلی است و خود دستگاهها سبک هستند. مشکل در استفاده از دستگاه های هوشمند در این است که اکثر گیرنده ها برای دریافت سیگنال ویدئویی از گیرنده ویدئویی بی سیم طراحی نشده اند (یکی از این دو سیم دار یا بی سیم است). یک لپ تاپ یا رایانه لوحی با کارت گرافیک داخلی یا USB می تواند فیلم کامپوزیت معمولی دریافت کند. این تلفن هوشمند در حال حاضر با ویدیویی که از طریق Wi-Fi ارسال می شود (از Wi-Fi دوربین به آداپتور Wi-Fi) بهترین کار را می کند. استفاده از سیگنال ویدئویی Wi-Fi و برنامه تلفن همراه GoPro یکی از ساده ترین راه ها برای پیاده سازی FPV است ، اما شایان ذکر است که محدوده سیگنال Wi-Fi دوربین بسیار محدود است (10-20 متر). از آنجایی که تلفن های هوشمند بسیار گسترده هستند و هواپیماهای بدون سرنشین بسیار مورد توجه هستند ، تولیدکنندگان به طور مرتب محصولات جدیدی را که از آنها سود می برند عرضه می کنند ، بنابراین قبل از تصمیم گیری دقیق فکر کنید.
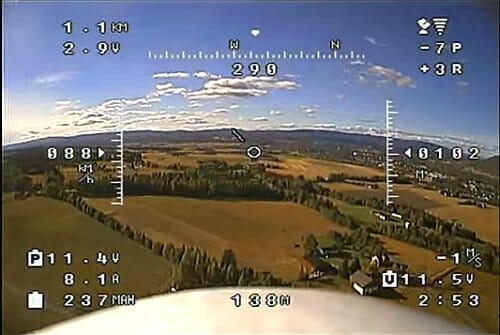
روی صفحه نمایش (OSD)
- در صفحه نمایش (OSD) به خلبان اجازه می دهد تا داده های مختلف سنسور ارسال شده از هواپیما یکی از ساده ترین راه ها برای نمایش داده ها روی صفحه ، استفاده از دوربین خروجی آنالوگ و قرار دادن برد نمایش بین خروجی دوربین و VTX است. برد آداپتور OSD دارای ورودی سنسورهای مختلف است و داده ها را روی ویدئو پوشش می دهد ، بنابراین خلبان ویدئویی با داده های دورسنجی که قبلاً روی هم قرار گرفته اند دریافت می کند.



ملاحظات فاصله
- در مورد قدرت فرستنده (تجهیزات کنترل و همچنین فیلم ، در صورت وجود) به طور معمول فرستنده های RC شامل یک سیستم RF متشکل از جوی استیک و کلید ، قطعات الکترونیکی و فرستنده RF و اجزای کم هزینه RC می باشند ، این سیستم تقریباً همیشه یک واحد است.مدلهای پیشرفته اغلب دارای ماژول RF
قدرت
پهپاد / هواپیمای بدون سرنشین
پهپاد / هواپیمای بدون سرنشین شما از قسمت های مختلف مختلفی تشکیل شده است که هر کدام به ولتاژ خاصی نیاز دارند. رایج ترین وسایل الکترونیکی که در سیستم FPV یا هواپیماهای بدون سرنشین دوربرد پیدا می کنید عبارتند از:
- موتورها: بیشتر موتورهای پهپاد متوسط با سرعت 11.1V یا 14.8 کار می کنند. V.
- کنترل پرواز ، گیرنده ، GPS: در حالت ایده آل باید توسط BEC از یکی از ESC ها تغذیه شود.
- گیرنده ردیابی سر: همچنین از BEC کار می کند.
- سرو گیمبال: سرو گیمبال را می توان از یکی از BEC ها به ESC و در 5 ولت کار کرد.
- گیمبال BLDC: برخی از گیمبال های BLDC را می توان به کانکتور اصلی شارژ باتری متصل کرد ، در حالی که برخی دیگر ممکن است به ولتاژ خاصی نیاز داشته باشند. مشخصات گیمبال را که خریداری می کنید بررسی کنید.
- دوربین: دوربین هایی که برای پرواز FPV استفاده می شوند معمولاً در 5 ولت (از BEC) یا 12 ولت (باتری اصلی) کار می کنند. اکثر دوربین های اکشن دارای باتری داخلی هستند.
- VTX: بیشتر آنها در 5 ولت کار می کنند و می توانند توسط BEC تغذیه شوند.
- لوازم الکترونیکی اضافی (روشنایی ، چتر نجات و غیره): 5 ولت.
توصیه می شود که پهپاد فقط یک باتری اصلی داشته باشد و شما باید از باتری 11.1 ولت یا 14.8 ولت در یک هواپیمای بدون سرنشین متوسط استفاده کنید. اگر بیش از یک ESC فاقد BEC است ، برای تغذیه قطعات الکترونیکی به یک تنظیم کننده ولتاژ خارجی 5 ولت نیاز دارید و مطمئن شوید که می تواند جریان کافی را برای همه چیز تامین کند.
خلبان
در حالی که کاربران معمولی هواپیماهای بدون سرنشین تنها باید نگران عملکرد تجهیزات کنترل باشند ، خلبان یک دکل FPV کامل ممکن است در نهایت حامل باتری های بزرگ و انواع تجهیزات اضافی باشد. به
- تجهیزات کنترل قابل حمل: اکثر ریموت ها به طور پیش فرض از باتری های "AA" (4 × AA یا 8 × AA) تغذیه می کنند ، اما FPV ممکن است به باتری خارجی نیاز داشته باشد. تجهیزات...
- فرستنده RF اختیاری: اگر از فرستنده / گیرنده RF ارائه شده با کنترل از راه دور استفاده نمی کنید ، معمولاً مدلهای رده بالاتر دارای خروجی قدرت هستند که می توان این ماژول را به آن متصل کرد. به روش دیگر ، می توانید آن را با باتری قابل شارژ خارجی که کنترل از راه دور را تغذیه می کند ، تغذیه کنید.
- گیرنده ردیابی سر: معمولاً این واحد را می توان از 5 ولت تغذیه کرد.
- گیرنده ویدئو: اکثر آنها به 12 ولت نیاز دارند ، اما اغلب دارای محدوده ولتاژ ورودی نسبتاً وسیعی هستند. بیشتر اوقات ، گیرنده دارای یک آداپتور برق است که از آن در محل استفاده نمی کنید. محدوده ولتاژ ورودی را بررسی کنید تا ببینید آیا می توانید از همان ولتاژ برای تغذیه فرستنده و گیرنده (مثلاً 7.4 ولت یا 12 ولت) استفاده کنید.
- نمایش ویدئو: حتماً یک صفحه نمایش LCD قابل حمل با کانکتور Barrel انتخاب کنید تا بتوانید از باتری برای ورودی استفاده کنید. عینک های FPV معمولاً ورودی بشکه هم دارند ، اما بررسی آن را فراموش نکنید. متداول ترین ولتاژ برای LCD های قابل حمل 12 ولت است که ممکن است برای سایر دستگاهها بهترین ولتاژ نباشد.
- ردیاب آنتن: در زیر شرح داده شده است. این دستگاه موتوری اغلب شامل سروو موتورهای رادیویی ، میکروکنترلر و حسگرهای الکترونیکی اضافی است. سیستم های تجاری بسیار کمی برای بازار سرگرمی های بدون سرنشین موجود است ، بنابراین اگر چنین سیستمی را طراحی و بسازید ، باید یک راه اندازی برق طراحی کنید.
ایستگاه پایگاه
همانطور که در بالا ذکر شد ، تجهیزات زیادی وجود دارد که خلبان برای حمل و برق رسانی به آنها نیاز دارد و می تواند بسیار حجیم باشد. ایستگاه های پایه اغلب برای رهایی اپراتور از این فشار / سردرگمی استفاده می شود و می تواند شامل تعدادی از تجهیزات و محفظه های مختلف باشد که در زیر ذکر شده است. تصور اینکه نحوه مونتاژ ایستگاه پایه ، نحوه اتصال سیم های همه این دستگاهها به یکدیگر بستگی به نتیجه آماده شدن برای پرواز ندارد.
ایستگاه پایه ممکن است شامل موارد زیر باشد:
- باتری اصلی ، احتمالاً برای تغذیه مانیتور LCD و / یا عینک FPV و احتمالاً گیرنده ویدئو.
- باتری کمکی برای فرستنده و / یا گیرنده فیلم.
- پایه مانیتور LCD و / یا پایه عینک FPV.
- سوار برای گیرنده فیلم.
- فضای ذخیره سازی تجهیزات کنترل.
- پایه آنتن برد بلند (یا محل قرارگیری آنتن جهت دار قابل حمل)
- مکانی برای شارژر باتری (های اصلی).
- فضا برای قطعات یدکی هواپیمای بدون سرنشین (ملخ ها ، موتورها ، باتری ها ، عناصر قاب).
"ایستگاه پایه" لزوماً یک محصول تجاری نیست که به راحتی با هر برنامه بدون سرنشین قابل استفاده باشد ، بلکه می تواند توسط خلبان آماتور به تنهایی طراحی و ساخته شود. به طور معمول ساخت ایستگاه پایه با انتخاب یک کیف حمل با دوام (مانند پلیکان یا نانوک) شروع می شود ، اگرچه می توان از یک کوله پشتی سفت و سخت نیز استفاده کرد. اغلب از سه پایه برای نصب آنتن بالاتر از سطح زمین استفاده می شود.

.آنتن ردیاب
Antenna tracker یک دستگاه الکترومکانیکی است که موقعیت یک هواپیمای بدون سرنشین را در سه بعد با استفاده از مختصات GPS ردیابی می کند و با دانستن مکان ردیاب GPS ، آنتن را به پهپاد جانبی هدایت می کند. ردیاب های آنتن معمولاً در ماموریت های دوربرد استفاده می شوند و محصولات تجاری زیادی در بازار وجود ندارد. ردیاب شامل یک گیرنده GPS ، یک قطب نما (و گاهی IMU) ، یک میکروکنترلر ، یک گیرنده داده (برای دریافت مختصات GPS هواپیمای بدون سرنشین) ، یک موتور دوار و یک شیب ، یک قاب مکانیکی ، یک آنتن جهت دار و یک باتری است. به برای کاهش تأثیر منفی موانع ، سیستم های ردیاب آنتن با استفاده از سه پایه از زمین بلند می شوند.








