Contenu
- Drone DIY: Leçon 1. Terminologie.
- Drone à faire soi-même: Leçon 2. Cadres.
- Drone à faire soi-même: Leçon 3. Centrale électrique.
- Drone à faire soi-même: Leçon 4. Contrôleur de vol.
- Drone à faire soi-même: Leçon 5. Assemblage.
- Drone à faire soi-même: Leçon 6. Contrôle des performances.
- Drone à faire soi-même: Leçon 7. FPV et distance.
- Drone de vos propres mains: Leçon 8. Avions.
Introduction
Dans la leçon 5, vous deviez terminer l'assemblage du drone (sans installer les hélices). Prenez votre temps, car même de petites erreurs peuvent entraîner un crash. Vous avez encore quelques étapes avant votre premier vol, alors soyez patient et suivez les directives ci-dessous. Comme dans la leçon précédente, nous continuerons à supposer que vous utilisez un équipement de contrôle radio pour interagir avec l'UAV (en tant que méthode de contrôle la plus largement utilisée à l'heure actuelle).
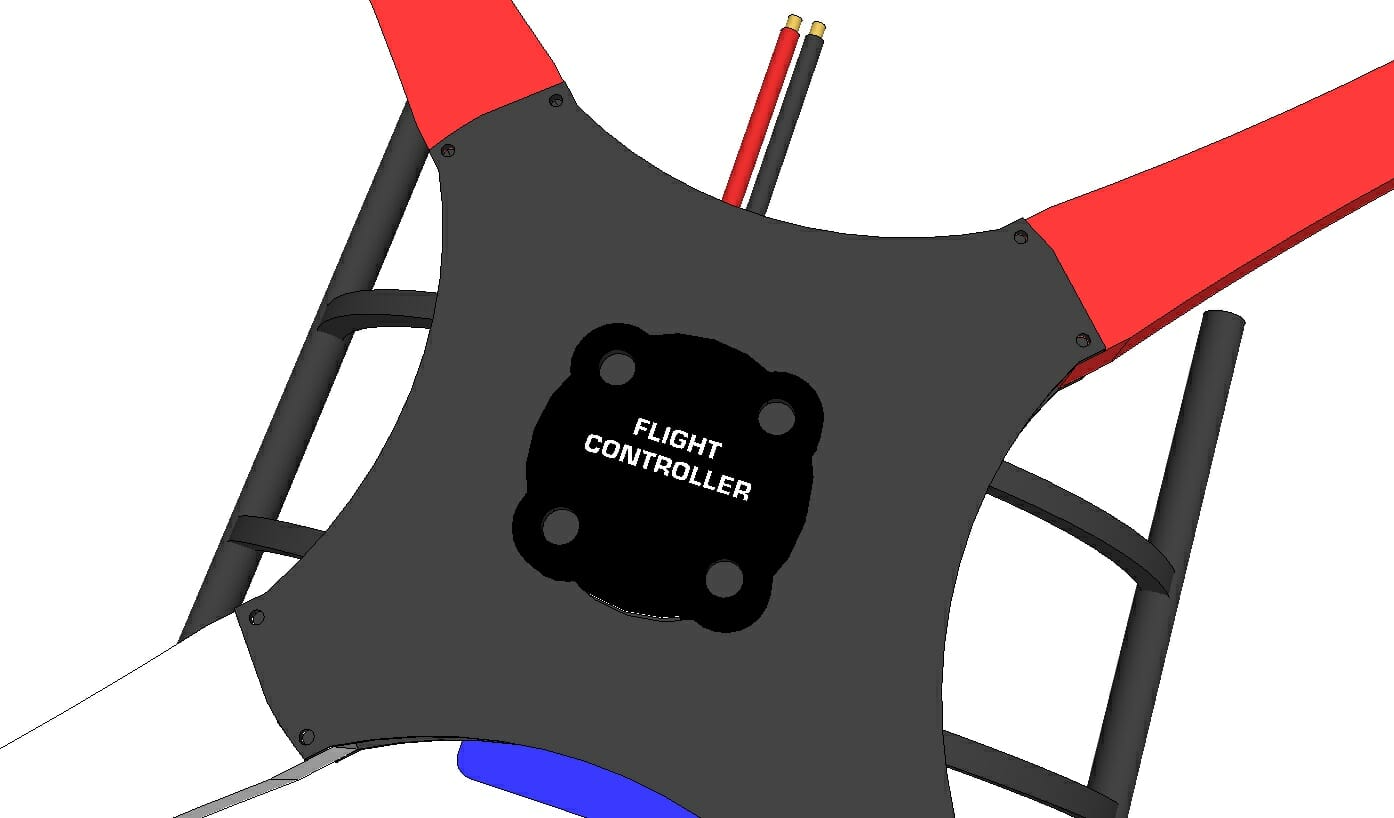
Contrôleur de vol
- Tous les contrôleurs de vol ne sont pas identiques, donc la procédure de configuration dépend vraiment du modèle que vous choisissez. Si vous ne l'avez pas déjà fait, prenez le temps de lire attentivement le manuel d'utilisation du contrôleur de vol sélectionné du début à la fin. Omettre le moindre détail peut faire la différence entre un premier vol réussi et un amortissement complet. Un manuel d'utilisation bien écrit doit inclure tout ce que vous trouvez sur cette page et plus encore, il est donc recommandé d'utiliser ce didacticiel comme une liste de contrôle et non comme un remplacement / une alternative aux instructions de base du développeur.
- La plupart des contrôleurs de vol fournissent une procédure étape par étape pour sélectionner les paramètres d'une configuration d'UAV spécifique, y compris un contrôle total sur les valeurs PID. Les valeurs de chacun (P, I et D) peuvent être ajustées en fonction de votre cadre et de votre style de vol; de quelque chose de plus stable pour l'utilisation de la plate-forme en photographie aérienne, à quelque chose de plus similaire aux vols sportifs (effectuer des sauts périlleux, courses de drones, etc.). Cela commence généralement par les valeurs par défaut pour chaque champ, et si vous n'avez pas assez d'expérience pour les modifier, il est recommandé de tout laisser tel quel jusqu'au premier vol.
- Le manuel du contrôleur de vol devrait également indiquer comment régler le régime minimum du groupe motopropulseur, c'est-à-dire régler la vitesse à laquelle les moteurs tournent lorsqu'ils sont chargés. Initialement, vous pouvez définir cette valeur relativement basse - juste assez pour voir les moteurs tourner, mais pas tellement que les drones sont déplacés par la poussée qu'ils génèrent. La poussée maximale, si vous pouvez définir cette valeur, doit correspondre à la valeur maximale que le manche des gaz de votre boîtier de commande peut fournir.
- Un aspect qui peut être abordé dans le manuel d'utilisation du contrôleur de vol sans faire aucune suggestion est le mode de vol. Pour en revenir à Leçon 4, le « Mode de vol » détermine quels capteurs sont utilisés pour stabiliser le drone, ainsi que sa fonction/objectif. Les capteurs les plus courants trouvés sur un contrôleur de vol sont le gyroscope, l'accéléromètre, le baromètre, la boussole et éventuellement le GPS.
- S'il s'agit de votre premier drone, il est fortement recommandé d'avoir le mode de vol le plus stable disponible pour votre contrôleur de vol, qui utilise le plus de capteurs disponibles pour stabiliser le drone. En général, cela est dû au fait que les paramètres du contrôleur PID peuvent être trop éloignés de votre cadre / paramètres, c'est pourquoi il est préférable de choisir les valeurs par défaut du contrôleur PID. Si vous avez déjà volé, le mode ACRO (qui n'utilise que le gyroscope) peut être le meilleur.
- La plupart des contrôleurs de vol vous permettront également de changer le « mode de vol » en vol via un canal de secours. Par exemple, si votre télécommande dispose de six canaux, vous pouvez envisager d'attribuer le canal 5 ou 6 (qui sont souvent associés à des commutateurs) afin de pouvoir changer de mode de vol tout en pilotant le drone. Avant de voler, assurez-vous de savoir quelle position du commutateur correspond à quel mode de vol.
- Il est fortement déconseillé d'utiliser un hotspot de vol GPS ou des fonctions/capteurs plus sophistiqués (par exemple, un capteur de distance à ultrasons pour déterminer la distance au sol) jusqu'à ce que vous soyez sûr que le drone est bien réglé. Certains manuels suggèrent d'utiliser uniquement le mode ACRO (acrobatique), cependant, si vous n'avez pas d'expérience de vol significative, voler dans ce mode ne vous sera pas physiquement possible, le mode est le plus difficile à contrôler, puisque la stabilisation est exclue.
Configuration de l'équipement de contrôle
- Certaines consoles ont différents modes de fonctionnement, comme Avion, Hélicoptère, Voiture etc. Dans 4 (Section: Control) nous avons discuté des quatre principaux canaux de contrôle: Throttle, Yaw, Pitch and Roll, qui sont généralement des valeurs associées aux avions ou aux hélicoptères. Si le manuel du contrôleur de vol ne spécifie pas un mode spécifique pour l'émetteur, il est recommandé d'utiliser le mode Avion.
- Il existe deux types de télécommande: Mode 1 (Mode 1) et Mode 2 (Mode 2). Le mode 2 (le plus courant) avec ce type de contrôle est Throttle and Yaw associé au canal gauche/stick/joystick, Pitch and Roll avec le droit. Vous pouvez également revérifier leur affectation en déplaçant directement les sticks pour vous assurer que les valeurs ne sont pas inversées.
- Les modes émetteur ajoutent souvent des niveaux de « décalage » de canal / signal pour rendre le mouvement plus adapté à un système particulier, mais la plupart des contrôleurs de vol se soucient de tout décalage et, à ce titre, privilégiez les valeurs « brutes ». Si votre émetteur ne dispose d'aucun mode, vérifiez simplement quel canal / stick / joystick est responsable de quoi.
- Un émetteur RC à usage général ne peut fournir qu'une gamme limitée de signaux sur chaque canal, et donc dans cette leçon nous vous conseillons de découvrir quelle gamme de valeurs un émetteur RC peut fournir et si le minimum et les valeurs maximales peuvent être ajustées (ou en tant que valeurs ou en pourcentage de la plage par défaut). Par exemple, les contrôleurs de vol basés sur MultiWii nécessitent des émetteurs pouvant fournir une gamme complète d'impulsions de 500 ms à 2500 ms, tandis que le paramètre par défaut ne peut être que de 1000 ms à 2000 ms car il s'agit d'une configuration courante pour les avions R / C. Lisez le manuel de votre émetteur pour savoir comment définir les points de terminaison/la plage de signal (le cas échéant).
- Si votre contrôleur dispose d'un écran LCD, vous pouvez souvent le faire via l'interface sous « Paramètres ».
- « Test de l'équipement de contrôle à max. La distance "est la plus simple à mettre en œuvre avec l'aide d'un ami / assistant, ou connectez un buzzer ou un autre retour visuel / sonore au drone RC. Certains modèles haut de gamme ont une fonction de test de portée. Le but du test est de voir jusqu'où le signal parcourt avant que le récepteur ne puisse plus le capter. Il est recommandé d'utiliser le test de portée uniquement après le "vol de combat" (vol de combat - le drone est testé pour ses performances à courte distance, dans la ligne de mire du pilote-drone). Procédure de test de portée:
- Allumez l'équipement de contrôle, puis l'avion.
- Reculez de 15 mètres et actionnez l'interrupteur associé au buzzer; Vous devez l'entendre.
- Si vous n'avez pas de buzzer, allumez l'avion et assurez-vous que les moteurs tournent.
- Arrêtez le buzzer / réarmez le drone
- Répétez ces étapes de plus en plus (ligne de mire) jusqu'à ce que le drone réponde à votre entrée.
- Ce sera la distance maximale absolue que vous pouvez parcourir avec votre drone.
- Vous pensez peut-être que vous n'avez pas l'intention de le faire voler aussi loin, mais rappelez-vous que le drone se déplace sur trois axes et que quelque chose pourrait mal se passer.
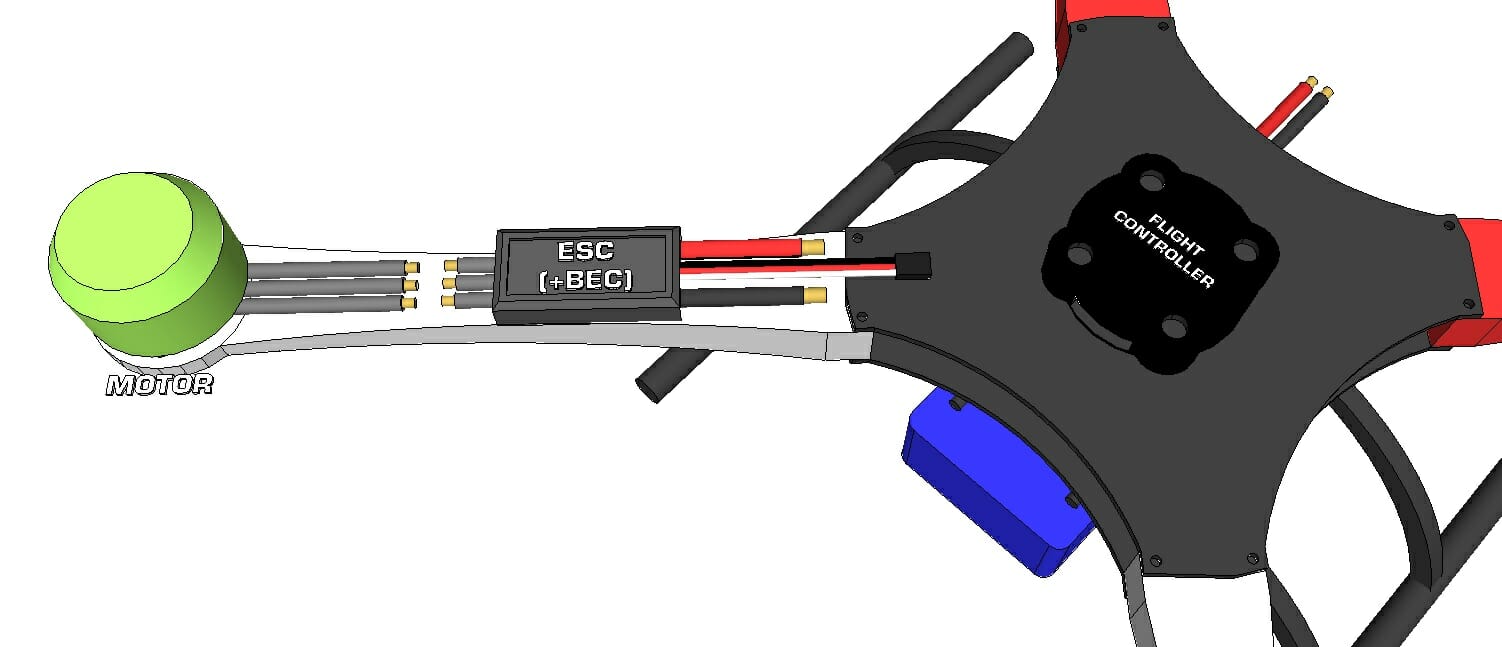
Étalonnage de l'ESC
L'ESC fonctionnera immédiatement, mais les signaux (PWM / PWM) associés aux gaz minimum et maximum peuvent ne pas correspondre à ce qui fournit votre émetteur. Par conséquent, vous devez "former" chaque ESC avec les valeurs requises. Assurez-vous que les hélices ne sont pas montées sur les moteurs. Reportez-vous au manuel d'utilisation de votre contrôleur de vol. Après reprogrammation, le variateur ESC conserve sa configuration actuelle même lorsqu'il n'est pas alimenté. Par conséquent, chaque ESC n'est programmé qu'une seule fois, lors du test / configuration initial.
Habituellement, il y a une section dans le manuel du contrôleur de vol qui explique comment étalonner l'ESC et explique comment le faire. Sinon, vous pouvez essayer l'une des méthodes suggérées ci-dessous. Encore une fois, si vous n'avez pas encore démonté vos hélices, il est temps de le faire.
Émetteur
- Connectez un ESC à la broche « Throttle » de votre récepteur. Si votre ESC n'a pas de BEC connecté, vous pouvez connecter un ESC compatible BEC à une autre broche du récepteur (telle que l'entrée de la batterie) simplement pour alimenter le récepteur.
- Connectez l'ESC au moteur approprié (s'il n'est pas déjà connecté).
- Réglez le stick/joystick associé à « Throttle » au maximum (généralement le stick/joystick gauche et complètement vers l'avant/le haut), puis allumez l'émetteur.
- Connectez la batterie LiPo au tableau de distribution électrique ou directement à cet ESC (si les connecteurs sont compatibles).
- Le moteur doit émettre trois bips (11,1 V LiPo) suivis d'une courte pause suivie de deux courts bips (qui est le bip maximum).
- Immédiatement après les bips courts, déplacez la manette des gaz / joystick vers la position la plus basse (qui est le bip minimum).
- Le moteur doit émettre trois bips (11,1 V LiPo) suivis d'un long bip.
- La plage des gaz pour cet ESC est maintenant définie, passez au suivant jusqu'à ce que tous les ESC aient été calibrés.
Autres méthodes
Suivez les instructions du manuel d'utilisation du produit pour faire correspondre la plage minimale / maximale du signal d'entrée ESC à ce qu'il recevra de l'émetteur.
- USB: Certains modèles d'ESC sont programmables via USB, soit indépendamment, soit avec un adaptateur.
- Carte de programmation: Carte de programmation ESC externe, peut être utilisée avec presque tous les ESC et est un appareil autonome.
- Microcontrôleur: Cette méthode n'est pas très utilisée, mais il est certainement possible de reprogrammer l'ESC avec un microcontrôleur si vous avez le bon code et pouvez vous connecter correctement.
- Contrôleur de vol: Certains contrôleurs de vol vous permettent d'étalonner ou de programmer les ESC via leur interface de programmation. Lisez les instructions de votre contrôleur de vol pour voir si cela est possible.
Moteur et rotor principal (hélice). Direction.
Vous êtes maintenant prêt à installer les hélices. Revenons à 3 leçon, qui traite de la direction du rotor principal pour créer la poussée. Toutes les hélices ont un haut et un bas, et un sens de rotation CW (dans le sens des aiguilles d'une montre) et CCW (dans le sens inverse des aiguilles d'une montre). Il y a généralement du texte en haut d'un accessoire indiquant sa hauteur et son diamètre. Lorsque l'hélice est montée sur l'arbre moteur, cette partie supérieure pointe vers le ciel, que le moteur soit monté sur le haut du faisceau du drone ou sur le bas du drone.

Liste de contrôle en amont du pilote
Bien que le drone ne soit pas aussi complexe ou dangereux qu'un véritable avion commercial, vous - en tant que pilote et doit avoir une liste de contrôle avant le vol pour s'assurer que le vol à venir ne mettra pas en danger les personnes ou les biens. La liste ci-dessous ne couvre que l'essentiel et doit être effectuée avant chaque vol (pas seulement avant le premier).
- Assurez-vous d'avoir l'une des aides visuelles disponibles pour dire de quel côté de votre drone est devant. Au minimum, ajoutez du ruban de couleur aux deux poutres avant.
- Assurez-vous que la batterie de l'équipement de contrôle est chargée.
- Secouez légèrement le drone - rien ne doit se desserrer, secouer ou tomber au sol. Vous ne saurez jamais ce qui a pu être déplacé ou cassé à la suite d'un atterrissage brutal lors d'un vol précédent.
- Assurez-vous que les hélices sont toujours solidement fixées.
- Allumez d'abord l'équipement de contrôle, puis alimentez le drone (gardez vos mains loin des rotors).
- Assurez-vous que vous pouvez armer et réarmer les moteurs de manière fiable (ils doivent tourner à bas régime lorsque « Armer » et s'arrêter de tourner lorsque « Désarmer »)
- Assurez-vous que vous calibrez ou que les capteurs sont bons calibré (vous devez le faire régulièrement)
- Vérifiez la portée de l'émetteur.
- Assurez-vous que la zone de vol est complètement dégagée et si quelqu'un s'y trouve, faites-le savoir, en particulier les enfants curieux; que vous pilotez le drone et que vous ne devez pas vous approcher tant que le drone n'a pas atterri avec les moteurs complètement arrêtés.

Tests
Jusqu'à ce que vous ayez suffisamment confiance en vos capacités en tant que pilote et concepteur de drone, la procédure suivante est suggéré pour tous les véhicules aériens sans pilote avant leur premier vol.
- Allumez les moteurs et assurez-vous qu'ils tournent dans le bon sens comme décrit dans le manuel du contrôleur de vol.
- Relevez le manche des gaz / joystick très lentement et assurez-vous que les hélices poussent l'air vers le sol. L'utilisation de papier de soie est une option sûre pour l'inspection visuelle.
- Déplacez le Pitch stick / joystick très prudemment vers l'avant / l'arrière pour vous assurer que le drone s'incline correctement vers l'avant / l'arrière.
- Déplacez très soigneusement le Roll stick / joystick de chaque côté pour vous assurer que le drone répond correctement.
Si le drone ne se comporte pas correctement, il existe de nombreuses raisons possibles, parmi lesquelles les plus courantes sont:
- Un ou plusieurs moteurs tournent dans le mauvais sens.
- Le contrôleur de vol n'a pas été installé correctement et ce qu'il considère "en avant" est différent de votre UAV physique.
- Un ou plusieurs contacts entre le récepteur et le contrôleur de vol ne sont pas connectés correctement ou même au mauvais endroit.
- Peut-être que tout est réglé correctement, juste trop rapidement ou trop brusquement pour répondre à l'entrée de l'utilisateur.
Plan d'urgence
commençant à peine à travailler sur le terrain et/ou avec un nouveau drone. La liste ci-dessous est destinée à vous donner des pistes de réflexion et quelques idées sur comment et pourquoi répondre aux aspirants pilotes. La décision est prise au cas par cas, et dans certaines situations, elle peut contredire ce qui est proposé ici. Alors apprenez à vous connaître, à connaître votre environnement et soyez prudent! Dans presque tous les cas, il vaudra mieux perdre le drone que de risquer d'entrer en collision avec des personnes ou des biens.
Le drone est très loin et vous ne savez pas dans quelle direction il est.
- Réduisez la manette des gaz et observez si le drone répond (vérifie s'il y a une connexion).
- Si le drone réagit au gaz, essayez d'atterrir juste là (si vous le pouvez).
- Si cet emplacement n'est pas propice à l'atterrissage, essayez soigneusement de pointer le drone vers l'avant (rien de drastique), et si le drone réagit en se fiant à votre position, un déplacement vers la gauche ou la droite dans le ciel vous permettra de déterminer son orientation. S'il ne semble pas se déplacer à gauche ou à droite, il se peut qu'il se déplace vers vous ou s'éloigne de vous, alors annulez ce que vous venez de faire et essayez de parcourir à gauche.
Le drone dévie brusquement de sa trajectoire (avec ou sans raison).
- Si vous ne maîtrisez pas le pilotage (pour essayer de le restaurer), coupez complètement les gaz et laissez-le tomber: dans ce cas, envisager une action radicale peut vous faire perdre de vue du drone ou, pire encore, le drone commencera à monter pour tomber d'une plus grande distance.
Le drone se déplace rapidement vers les gens.
- Gaz au maximum pour qu'il prenne de l'altitude et les survole; votre drone sera probablement toujours dans la bonne orientation générale, il vaut donc mieux perdre le drone que de voler dans les gens.
- Après avoir atteint l'altitude optimale, essayez de reprendre le contrôle, puis positionnez-le de manière à ce qu'il soit au-dessus de la zone d'atterrissage dégagée.
Le drone se déplace rapidement vers vous.
- Gaz à zéro; qu'il écrase le sol, que de voler dans ta tête.
Le drone ne répond pas à l'entrée de l'équipement de contrôle.
- Dans ce cas, vous ne pouvez rien faire. Si votre drone est toujours en l'air, les piles de votre télécommande pourraient être épuisées.
Le drone perd l'hélice.
- La perte d'une hélice affecte à la fois la poussée et le lacet; essayez d'abord de redresser le lacet (vous devez probablement tenir le manche / joystick connecté au lacet, dans la position extrême), puis en même temps déplacez soigneusement le manche des gaz / manette des gaz vers le haut pour éviter une collision, puis baissez les gaz.
Premier vol
Quelle que soit votre expérience de vol précédente, votre premier vol, en particulier avec un drone multimoteur personnalisé, doit être aussi discret que possible. Le but du premier vol est de s'assurer que tout est configuré correctement; ainsi que d'identifier tout problème grave.
- Emplacement: aire ouverte, loin des bâtiments, des personnes et des biens. Par exemple: un terrain de football vide, un terrain de baseball, etc. serait idéal. Il ne devrait pas y avoir de vent du tout.
- Parcourez la liste de contrôle avant le vol du pilote.
- Tenez-vous à environ 2 mètres du drone avec l'avant du drone tourné vers vous.
- Armer les moteurs.
- Déplacez doucement la manette des gaz/le joystick vers le haut. Atteignez le point où le drone est prêt à décoller. Il peut y avoir des effets de sol qui font légèrement rebondir le drone, mais ne vous inquiétez pas.
- Ajoutez des gaz pour faire décoller le drone du sol et vous habituer aux commandes - essayez de le garder dans un certain rayon et voyez comment il réagit aux mouvements de votre manche / joystick.
- Faites de petits mouvements graduels et fluides — rien de trop brusque. Abaissez la manette des gaz pour éviter un accident.
- Si votre drone ne se comporte pas comme prévu (par exemple, déplacer l'axe "Pitch" conduit à son tangage, ainsi qu'un roulis à gauche ou à droite), quelque chose ne va pas, et vous devrez trouver le causes des problèmes identifiés...
- Si le drone se comporte comme prévu, votre tâche consiste à maintenir fermement sa position à une hauteur de 1,2 à 2 mètres du sol. Ne vous fâchez pas si vite.


.Vols supplémentaires
Maintenant que vous avez résolu les problèmes et que vous volez confortablement dans un environnement contrôlé, vous pouvez procéder au deuxième vol.
- Le drone n'étant pas encore entièrement testé, nous suggérons de suivre la procédure complète de pré-vol pour le premier vol, ce qui ne devrait pas prendre longtemps.
- En utilisant des mouvements fluides, habituez-vous à la façon dont le drone réagit aux mouvements de votre bâton / bâton en le gardant à une distance de sécurité.
- L'adaptation au pilotage d'un drone doit se faire sans l'aide du FPV et de divers capteurs.







