Contenu
- Drone DIY: Leçon 1. Terminologie.
- Drone à faire soi-même: Leçon 2. Cadres.
- Drone à faire soi-même: Leçon 3. Centrale électrique.
- Drone à faire soi-même: Leçon 4. Contrôleur de vol.
- Drone à faire soi-même: Leçon 5. Assemblage.
- Drone à faire soi-même: Leçon 6. Contrôle des performances.
- Drone à faire soi-même: Leçon 7. FPV et distance.
- Drone de vos propres mains: Leçon 8. Avions.
Introduction
Maintenant que vous avez sélectionné ou construit un cadre, l'étape suivante consiste à sélectionner le bon groupe motopropulseur. Étant donné que la plupart des drones existants sont électriques, nous nous concentrerons sur la génération d'une propulsion purement électrique grâce à des moteurs à courant continu sans balais. La centrale électrique comprend des moteurs, des rotors (hélices, hélices abrégées), un ESC et une batterie de stockage.
1. Moteur
À partir des moteurs que vous utilisez dans votre assemblage, cela dépendra de la charge maximale que le drone peut soulever, ainsi que de la durée de son vol. La centrale électrique doit nécessairement être constituée de moteurs de même marque et modèle, cette approche lui assurera un fonctionnement équilibré. Il convient de noter que même des moteurs absolument identiques (Marque / Modèle) peuvent avoir une légère différence de vitesse, qui est ensuite nivelée par le contrôleur de vol.
Brushed vs Brushless
Dans les moteurs Brushed, le rotor bobiné tourne à l'intérieur du stator sur lequel les aimants sont fixés rigidement. Dans les moteurs brushless, tout est au tour; le bobinage est fixé rigidement à l'intérieur du stator, et les aimants sont montés sur l'arbre et tournent. Dans la plupart des cas, vous ne considérerez que les moteurs à courant continu sans balais (BC). Les moteurs de ce type sont largement utilisés dans l'industrie de la radio amateur pour assembler des produits allant des hélicoptères et des avions aux systèmes d'entraînement des voitures et des bateaux.
Les moteurs sans balais Pancake sont de plus grand diamètre, plus plats et ont généralement un couple élevé et un KV inférieur (détails ci-dessous). Les drones de petite taille (généralement de la taille d'une paume) utilisent souvent de petits moteurs à balais en raison de leur coût inférieur et de leur simple contrôleur à deux fils. Bien que les moteurs sans balais soient disponibles dans différentes tailles et spécifications, choisir une taille plus petite ne signifie pas qu'il sera moins cher.

Inrunner vs Outrunner
Il existe plusieurs types de moteurs à courant continu sans balais:
- Inrunner est un rotor interne. L'enroulement est fixé au stator, les aimants sont montés sur l'arbre du rotor, qui tourne (généralement utilisé sur les bateaux RC, les hélicoptères et les voitures en raison du KV élevé).
- Outrunner - rotor externe. Les aimants sont fixés à un stator qui tourne autour d'un enroulement fixe. Le bas du moteur est fixe.(en règle générale, les moteurs de ce type ont plus de couple).
- Hybrid Outrunner est techniquement un "Outrunner" mais implémenté dans un package "Inrunner". Cette approche a permis de combiner dans un même type le couple "Outrunner" et l'absence d'éléments tournants externes comme dans les moteurs de type "Inrunner".
KV
Classe KV - max. le nombre de tours que le moteur peut développer sans perte de puissance à une tension donnée. Pour la plupart des drones multirotors, une faible valeur KV (par exemple, de 500 à 1000) est pertinente, car cela contribue à assurer la stabilité. Alors que pour le vol acrobatique, une valeur KV entre 1000 et 1500 sera pertinente, en tandem avec des rotors de plus petit diamètre (hélices). Disons que la valeur KV pour un moteur particulier est de 650 tr/min, alors à une tension de 11,1 V le moteur tournera à une vitesse de: 11,1 × 650 = 7215 tr/min, et si vous utilisez le moteur à une tension inférieure (disons 7,4 V), alors la vitesse de rotation sera: 7,4 × 650 = 4810 tr/min. Il est important de noter, cependant, que l'utilisation d'une basse tension signifie généralement une consommation de courant plus élevée (Puissance = Courant × Tension).
Poussée
Certains fabricants de moteurs sans balais peuvent spécifier dans les spécifications des informations sur la poussée maximale possible (Poussée) générée par le moteur en conjonction avec le rotor principal recommandé. L'unité de mesure de la poussée est généralement le kilogramme (Kg / Kg), la livre (Lb) ou le Newton (N). Par exemple, si vous construisez un quadricoptère et que vous connaissez la valeur de poussée d'un seul moteur = jusqu'à 0,5 kg dans un compartiment avec un rotor de 11 pouces, alors à la sortie quatre de ces moteurs peuvent être soulevés à la poussée maximale: 0,5 kg × 4 = 2 kg. En conséquence, si le poids total de votre quadricoptère est légèrement inférieur à 2 kg, alors avec une telle centrale, il ne décollera qu'à un régime maximum (poussée max). Dans ce cas, il sera pertinent soit de choisir un ensemble moteur rotor plus puissant, qui fournira plus de poussée, soit de réduire le poids total du drone. Au max. poussée de la centrale = 2 kg, le poids du drone ne doit pas dépasser la moitié de cette valeur (1 kg, poids des moteurs eux-mêmes compris). Un calcul similaire peut être effectué pour n'importe quelle configuration. Supposons que le poids de l'hexacoptère (y compris le cadre, les moteurs, l'électronique, les accessoires, etc.) soit de 2,5 kg. Cela signifie que chaque moteur pour un tel ensemble doit fournir (2,5 kg ÷ 6 moteurs) × 2 = 0,83 kg de poussée (ou plus). Vous savez maintenant comment calculer la poussée optimale des moteurs en fonction du poids total, mais avant de prendre une décision, nous vous suggérons de vous familiariser avec les sections ci-dessous.
Considérations supplémentaires
- Connecteurs: Les moteurs CC à balais ont deux connecteurs "" et "-". Changer les fils par endroits change le sens de rotation du moteur.
- Connecteurs: Les moteurs CC sans balais ont trois connecteurs. Pour savoir comment les connecter, ainsi que comment changer le sens de rotation, reportez-vous à la section ESC ci-dessous.
- Enroulements: Les enroulements affectent le KV des moteurs. Si vous avez besoin de la valeur KV la plus basse mais que vous donnez la priorité au couple, il est préférable de porter votre attention sur les moteurs à courant continu sans balais de type Pancake.
- Montage: La plupart des fabricants ont un schéma de câblage général pour les moteurs à courant continu pour les moteurs à courant continu, ce qui permet aux fabricants de châssis d'éviter de fabriquer des adaptateurs. Le gabarit est généralement métrique, avec deux trous distants de 16 mm et deux autres trous distants de 19 mm (90 ° au premier).
- Filetage: Le filetage de montage utilisé pour fixer le moteur sans balai au châssis peut varier. Les tailles métriques habituelles des vis sont M1, M2 et M3, les tailles impériales peuvent être de 2-56 et 4-40.
2. Rotors principaux (hélices)
Les rotors principaux (hélices, hélices abrégées) des drones multirotors proviennent des hélices des aéronefs radiocommandés. Beaucoup se demanderont: pourquoi ne pas utiliser des pales d'hélicoptère? Même si cela a déjà été fait, imaginez les dimensions d'un hexacoptère avec des pales d'hélicoptère. Il convient également de noter que le système hélicoptère nécessite une modification du pas des pales, ce qui complique considérablement la conception.
On peut aussi se demander pourquoi ne pas utiliser un turboréacteur, un turboréacteur, un turbopropulseur, etc.? Certes, ils sont incroyablement doués pour fournir beaucoup de poussée, mais ils nécessitent également beaucoup d'énergie. Si la principale préoccupation du drone est de se déplacer très rapidement plutôt que de planer dans un espace confiné, l'un des moteurs ci-dessus peut être une bonne option.
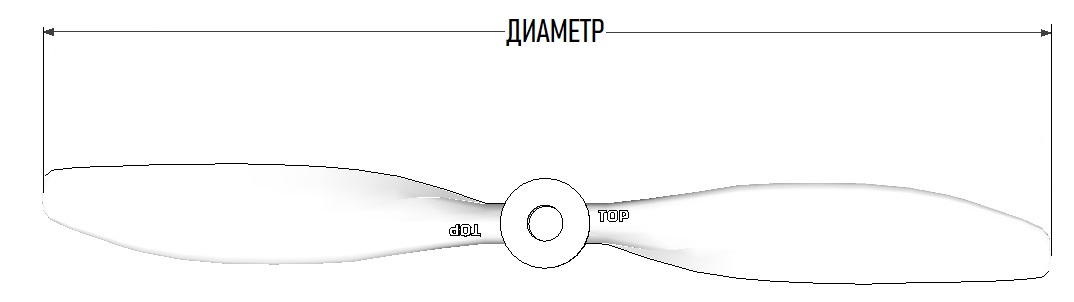
Pales et diamètre
Le rotor principal de la plupart des drones multirotors a deux ou trois pales. Les hélices les plus utilisées sont à deux pales. Ne présumez pas que l'ajout de plus de pales augmentera automatiquement la poussée; chaque pale travaille dans le flux perturbé par la pale précédente, réduisant l'efficacité de l'hélice. Le rotor principal de petit diamètre a moins d'inertie et il est donc plus facile d'accélérer et de décélérer, ce qui est important pour le vol acrobatique.

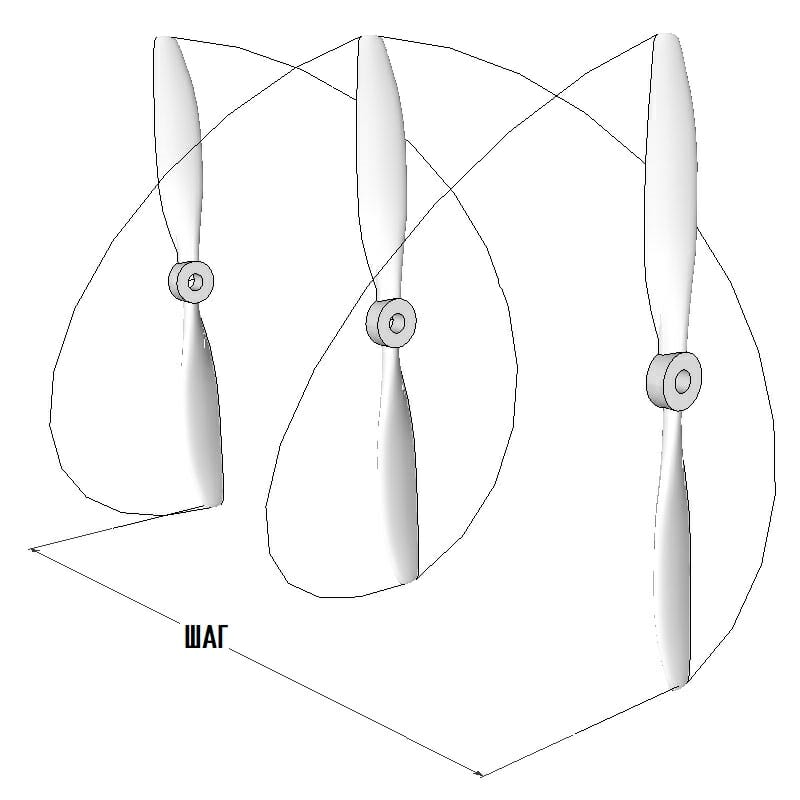
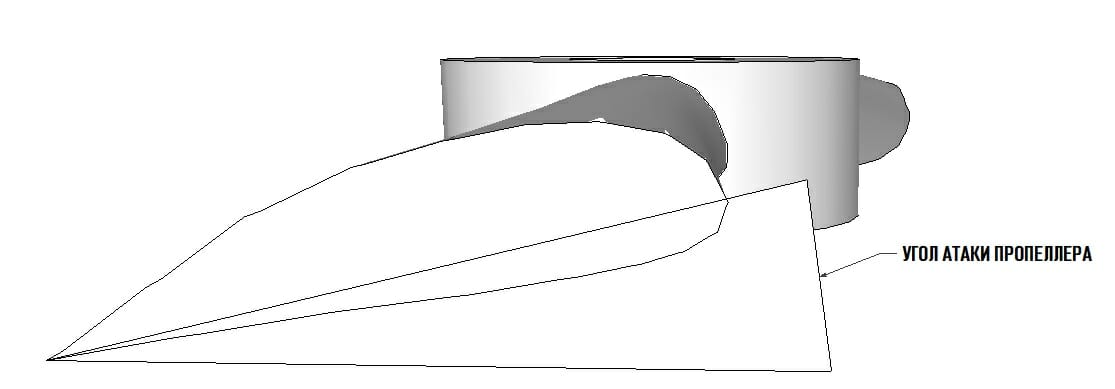
Pas / Angle d'attaque / Efficacité / Poussée
La poussée générée par le rotor principal dépend de la densité de l'air, du nombre de tours de l'hélice, de son diamètre, de la forme et de la surface des pales, ainsi que de son pas. L'efficacité d'une hélice est liée à l'angle d'attaque, qui est défini comme le pas de la pale moins l'angle d'hélice (l'angle entre la vitesse relative résultante et le sens de rotation de la pale). L'efficacité elle-même est le rapport entre la puissance de sortie et la puissance d'entrée. La plupart des hélices bien conçues sont efficaces à plus de 80 %. L'angle d'attaque est influencé par la vitesse relative, de sorte que l'hélice aura une efficacité différente à différentes vitesses du moteur. L'efficacité est également fortement affectée par le bord d'attaque de la pale du rotor principal, et il est très important qu'il soit aussi lisse que possible. Alors qu'une conception à pas variable serait la meilleure, la complexité supplémentaire requise par rapport à la simplicité inhérente du multi-rotor signifie qu'une hélice à pas variable n'est presque jamais utilisée.
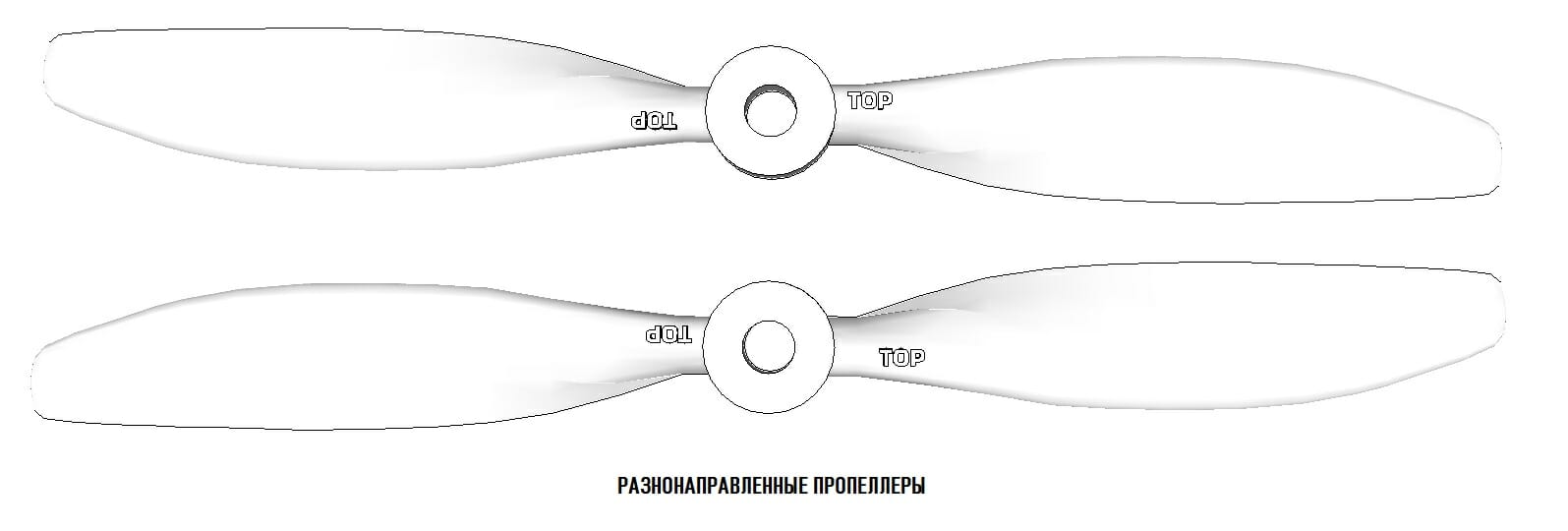
Rotation
Les rotors sont conçus pour une rotation dans le sens horaire (CW) ou antihoraire (CCW). Le sens de rotation est indiqué par l'inclinaison de la pale ( regardez l'hélice par le boutVtailY6X8
Matériaux d'exécution
Le(s) matériau(x) utilisé(s) pour la fabrication des rotors (hélices) peuvent avoir un effet modéré sur le vol performance mais la sécurité doit être une priorité absolue, surtout si vous êtes débutant et inexpérimenté.
- Le plastique (ABS / Nylon, etc.) est le choix le plus populaire en matière de drones multimoteurs. Cela est largement dû au faible coût, aux caractéristiques de vol décentes et à la durabilité exponentielle. En règle générale, en cas de crash, au moins une hélice est cassée, et pendant que vous maîtrisez le drone et apprenez à voler, vous aurez toujours beaucoup d'accessoires cassés. La rigidité et la résistance aux chocs de la vis en plastique peuvent être améliorées en renforçant avec de la fibre de carbone (carbone), cette approche est max. efficace et pas si cher par rapport à une hélice à part entière et en fibre de carbone.
- Polymère renforcé de fibres (fibre de carbone, nylon renforcé de carbone, etc.) - est la technologie "avancée" dans de nombreuses relations. Les pièces en fibre de carbone ne sont toujours pas très faciles à fabriquer et vous les payez donc plus cher que pour une vis en plastique ordinaire avec des paramètres similaires. Une hélice en fibre de carbone est plus difficile à casser ou à plier et, par conséquent, si elle se bloque, elle endommagera davantage tout ce avec quoi elle entrera en contact. Dans le même temps, les hélices en carbone sont généralement bien faites, plus rigides (permettant une perte d'efficacité minimale), ont rarement besoin d'être équilibrées et sont plus légères que tout autre matériau. Il est recommandé de n'envisager de telles hélices qu'une fois que le niveau de pilotage de l'utilisateur est devenu confortable.
- Le bois est un matériau rarement utilisé pour la production de rotors de drones multi-rotors, car leur fabrication nécessite un traitement mécanique, ce qui rend plus tard les hélices en bois plus chères que celles en plastique. En même temps, l'arbre est assez fort et ne se plie jamais. A noter que les hélices en bois sont encore utilisées dans les avions radiocommandés.



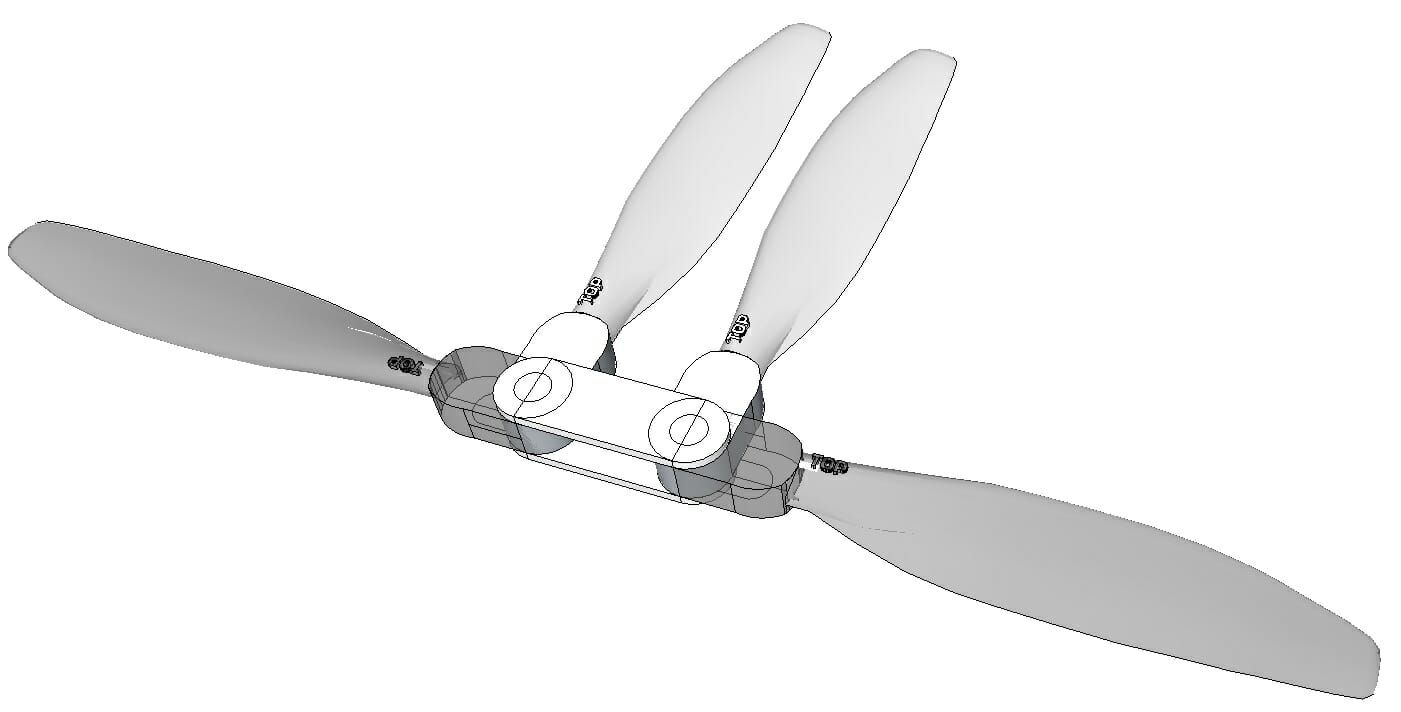
Pliable
Les accessoires pliables ont une partie centrale qui se connecte à deux lames pivotantes. Lorsque le centre (qui est connecté à l'arbre de sortie du moteur) tourne, les forces centrifuges agissent sur les pales, les poussant vers l'extérieur et rendant essentiellement l'hélice "rigide", avec le même effet qu'une hélice classique non pliable. En raison de la faible demande et du grand nombre de pièces nécessaires, les hélices repliables sont moins courantes. Le principal avantage des accessoires pliables est leur compacité et, en combinaison avec un cadre pliable, les dimensions de transport du drone peuvent être nettement inférieures aux dimensions de vol. Un avantage concomitant du mécanisme de pliage est l'absence de besoin, en cas de crash, de changer entièrement l'hélice, il suffira de remplacer uniquement la pale endommagée.
Installation
Comme les drones, les rotors peuvent avoir une large gamme de tailles. Ainsi, il existe un certain nombre de diamètres d'arbre de moteur « standard » dans l'industrie. À cet égard, le rotor principal est souvent fourni avec un petit jeu de bagues adaptatrices (elles ressemblent à des rondelles avec des trous de diamètres différents au centre), qui sont installées dans l'alésage central de l'hélice
La vis peut être fixée au moteur en fonction de la méthode de montage prise en charge par votre moteur. Si l'arbre du moteur n'implique aucune option de fixation (raccord fileté, divers dispositifs de fixation, etc.), des adaptateurs spéciaux sont utilisés, tels que des propulseurs et des pinces à pince.
- Propsaver
- Mandrin à pince
Les moteurs sans balais avec un rotor extérieur (type "Outrunner"), en règle générale, dans la partie supérieure de celui-ci, ont plusieurs trous filetésest une option tout aussi populaire pour fixer l'hélice à l'arbre du moteur BC
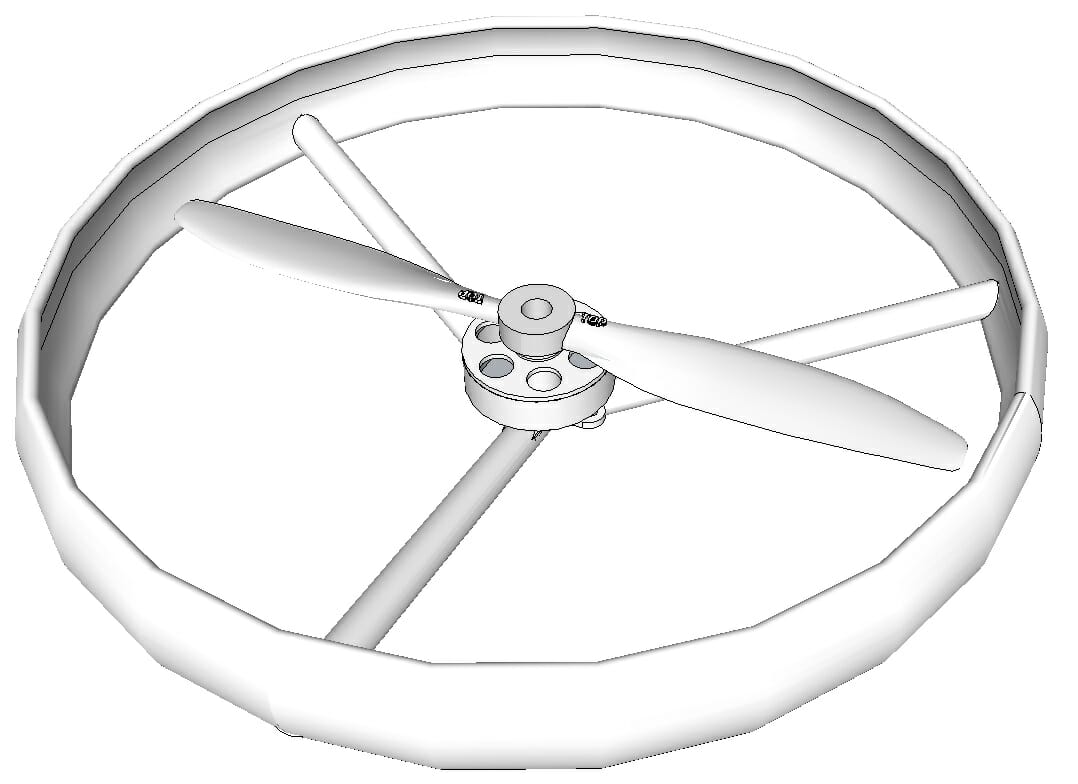
Protection des rotors
Protection des rotors - conçue pour exclure le contact direct de la centrale électrique de l'UAV avec un objet venant en sens inverse, préservant ainsi son intégrité et son opérabilité, ainsi que pour éviter les blessures aux hélices en rotation rapide à la suite de collisions avec des personnes et des animaux. Les protections d'hélice sont fixées au châssis principal. Selon la version, il peut soit recouvrir partiellement la zone de travail de la centrale, soit totalement (protection annulaire). La protection de l'hélice est le plus souvent utilisée sur les petits drones (jouets). L'utilisation d'éléments de protection dans l'assemblage apporte également un certain nombre de compromis, notamment:
- Peut provoquer des vibrations excessives.
- Résiste généralement aux coups légers.
- Peut réduire la poussée si trop de pieds de montage sont placés sous l'hélice.
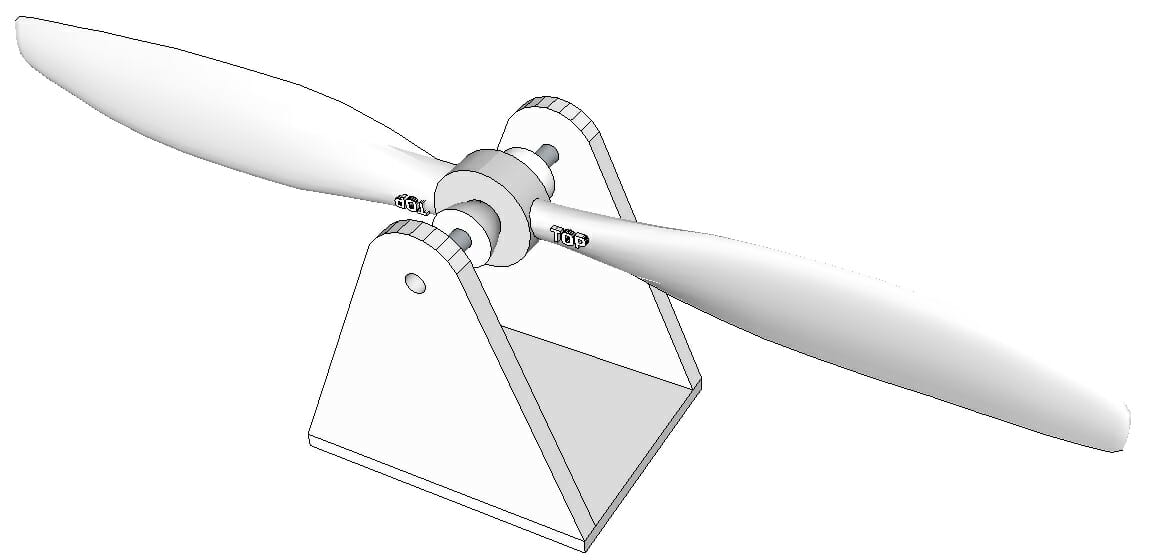
Équilibrage
Un mauvais équilibrage se produit sur la plupart des hélices bon marché. Pour s'en assurer, vous n'avez pas besoin d'aller loin, il suffit d'insérer un crayon dans l'alésage central de la vis (en règle générale, avec un déséquilibre, un côté sera plus lourd que l'autre). Par conséquent, il est fortement recommandé d'équilibrer vos accessoires avant de les installer sur les moteurs. Une hélice déséquilibrée provoquera des vibrations excessives, qui à leur tour affecteront négativement les performances du contrôleur de vol (se traduisant par un comportement incorrect du drone en vol), sans parler d'une augmentation du bruit, d'une usure accrue des éléments du groupe motopropulseur, et d'une détérioration de la qualité de prise de vue d'une caméra suspendue.
L'hélice peut être contrebalancée de différentes manières, mais si vous construisez un drone à partir de zéro, alors dans l'arsenal d'outils, il doit y avoir un équilibreur d'hélice peu coûteux qui vous permet de déterminer facilement et simplement le déséquilibre de poids dans l'hélice. Pour égaliser le poids, vous pouvez soit meuler la partie la plus lourde de l'hélice (la partie centrale de la pale est poncée uniformément, et en aucun cas couper la partie hélice), vous pouvez également équilibrer en collant un morceau de scotch (fin) sur la lame du briquet (ajouter les segments uniformément jusqu'à ce que l'équilibre soit atteint). A noter que plus on s'éloigne du centre pour effectuer une mise à niveau de l'équilibrage (ponçage ou ajout d'une courroie) de l'hélice, plus l'effet basé sur le principe du couple sera important.
3. ESC
ESC (contrôleur de vitesse électronique anglais; rus.régulateur de vitesse électronique) - permet au contrôleur de vol de contrôler la vitesse et la direction du moteur. Avec la tension correcte, l'ESC doit être capable de supporter max. le courant que le moteur peut consommer, et aussi limiter le courant traversant la phase lors de la commutation. La plupart des ESC pour drones de loisir ne permettent au moteur de tourner que dans un sens, mais avec le bon micrologiciel, ils peuvent fonctionner dans les deux sens.
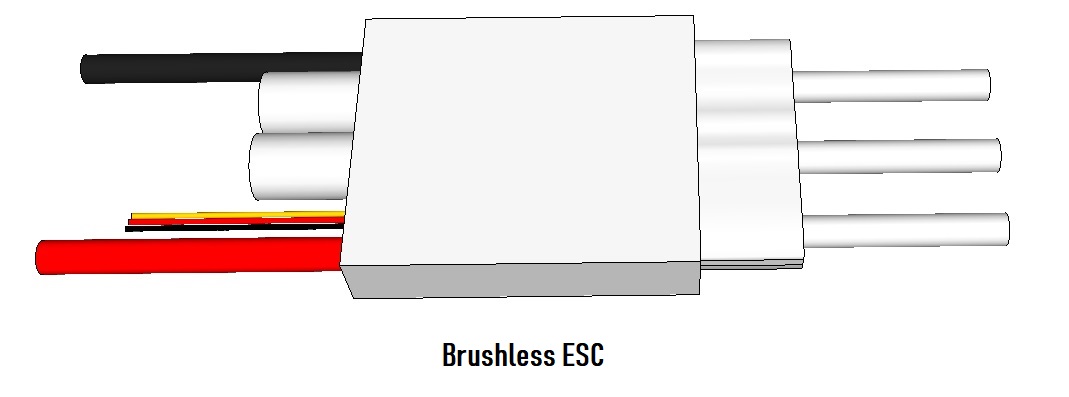
Connexion
Au départ, l'ESC peut être déroutant car il y a plusieurs fils / broches / connecteurs disponibles pour le connecter. côtés (les ESC peuvent être livrés avec ou sans connecteurs soudés).
- Alimentation: Deux fils épais (généralement noir et rouge) sont fournis pour alimenter le tableau de distribution/le faisceau électrique auquel l'alimentation provient directement de la batterie principale de l'avion.
- 3 connecteurs: Trois connecteurs sont disponibles sur le côté opposé du contrôleur pour le raccordement à trois connecteurs bullet (généralement fournis avec les moteurs) sur un moteur brushless. L'utilisation de connecteurs lors de la connexion de l'ESC permet, si nécessaire (en cas de panne), de changer rapidement de contrôleur sans utiliser de fer à souder. Il arrive que les connecteurs en forme de balle fournis avec le moteur ne correspondent pas aux connecteurs du régulateur, auquel cas, remplacez-les simplement par des connecteurs adaptés. Lequel des trois est "plus" et lequel est "moins"? Le point de référence est un simple fil positif provenant de la batterie, passe au positif sur l'ESC, de la même manière avec un moins.
- Connecteur servo R/C à 3 broches avec fils fins: à travers lequel le signal provenant du récepteur est traité, dont un fil est le signal (transmission du signal de gaz à l'ESC ou entrée), le deuxième "Moins" (ou masse) et un fil positif (non utilisé s'il n'y a pas de BEC intégré; avec BEC intégré, il s'agit d'une sortie d'alimentation 5 V, qui peut ensuite être utilisée pour alimenter électronique embarquée).
BEC
Au début de la modélisation des avions, un moteur à combustion interne était utilisé comme centrale électrique et l'électronique embarquée était alimentée par un petit batterie. Avec l'avènement de la traction électrique et des contrôleurs (ESC), dans ce dernier, ils ont commencé à inclure le circuit d'élimination de la batterie - BEC (en anglais. Battery Eliminator Circuit; ou convertisseur de puissance embarqué; en règle générale, il fournit une source de courant supplémentaire avec une tension de 5V à un courant de 1A ou plus). Autrement dit, il s'agit d'un convertisseur de tension utilisé dans l'assemblage LiPo en une tension pour alimenter l'électronique embarquée du drone.
Lors de l'assemblage du multirotor, tous les ESC doivent être connectés au contrôleur de vol, mais un seul BEC est nécessaire, sinon des problèmes peuvent survenir lors de l'alimentation des mêmes lignes. Puisqu'il n'y a généralement aucun moyen de désactiver le BEC sur un ESC, il est préférable de retirer le fil rouge () et de l'envelopper avec du ruban isolant pour tous les ESC sauf un. Il est également important de laisser le fil noir (terre) pour la terre commune.
Firmware
Tous les ESC sur le marché ne sont pas aussi bons pour les applications multi-rotors. Il est important de comprendre qu'avant l'avènement des drones multimoteurs, les moteurs sans balais étaient principalement utilisés comme centrale électrique pour les voitures, les avions et les hélicoptères radiocommandés. La plupart ne nécessitent pas de temps de réponse ou de mises à jour rapides. Les ESC avec le logiciel embarqué SimonK ou BLHeli sont capables de réagir très rapidement aux changements entrants, ce qui fait généralement la différence entre un vol stable ou un crash.
Distribution de l'alimentation
Étant donné que chaque ESC est alimenté par la batterie principale, le connecteur de la batterie principale doit en quelque sorte être divisé en quatre ESC. Cela se fait à l'aide de la carte de distribution d'alimentation ou du faisceau de distribution d'alimentation. Cette carte (ou câble) divise les bornes positive et négative de la batterie principale en quatre. Il est important de noter que les types de connecteurs utilisés sur la batterie, l'ESC et le tableau de distribution peuvent ne pas être les mêmes, il est donc préférable de choisir un connecteur "standard" chaque fois que possible (par exemple Deans
4. Batterie
Chimie
Les batteries utilisées dans les véhicules aériens sans pilote sont actuellement exclusivement lithium polymère (LiPo), et la composition de certaines d'entre elles est assez exotique - lithium manganèse ou autre lithium variantes. Le plomb acide n'est tout simplement pas adapté et NiMh / NiCd sont encore trop lourds pour leur capacité et ne peuvent souvent pas fournir les taux de décharge élevés requis. LiPo offre des performances élevées et un taux de décharge avec un faible poids. Les inconvénients sont leur coût relativement élevé et des problèmes de sécurité constants (risque d'incendie).
Tension
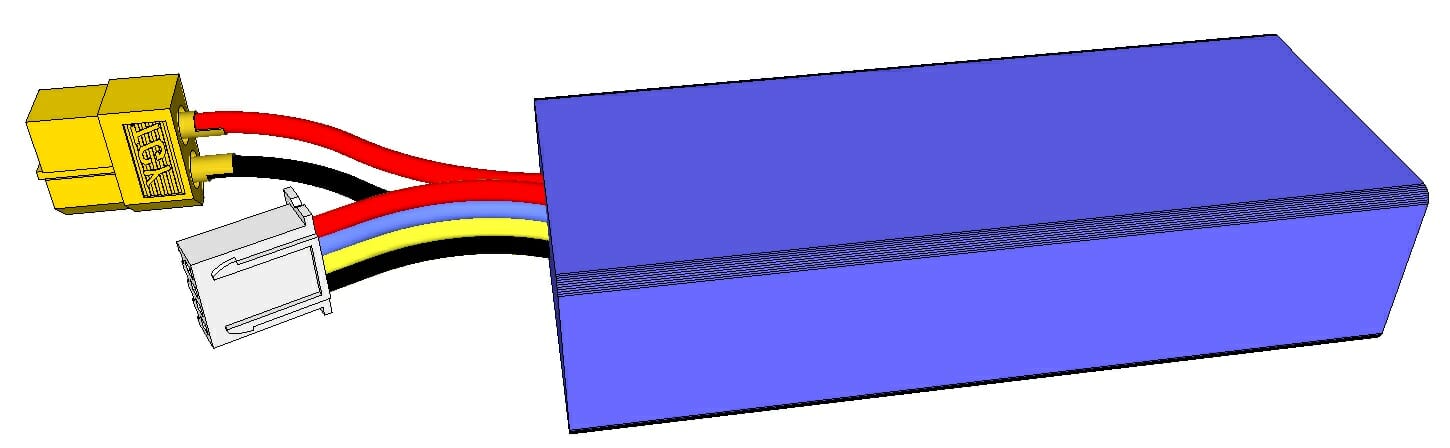
En pratique, vous n'avez besoin que d'une seule batterie pour votre drone. La tension de cette batterie doit correspondre aux moteurs BK que vous avez sélectionnés. Presque toutes les batteries utilisées aujourd'hui sont à base de lithium et contiennent plusieurs cellules (boîtes) de 3,7 V chacune, où 3,7 V = 1S (c'est-à-dire une batterie à une boîte; 2S est à deux boîtes, etc.). Par conséquent, une batterie étiquetée 4S est susceptible d'avoir une valeur nominale de 4 × 3,7 V = 14,8 V. De plus, le nombre de canettes vous aidera à déterminer quel chargeur utiliser. Notez qu'une batterie monocellulaire de haute capacité peut physiquement ressembler à une batterie multicellulaire de faible capacité.
Capacité
La capacité de la batterie est mesurée en ampères-heures (Ah). Les petites batteries peuvent avoir une capacité de 0,1 Ah (100 mAh), la capacité de la batterie pour les drones de taille moyenne peut aller de 2 à 3 Ah (2000 mAh - 3000 mAh). Plus la capacité est élevée, plus le temps de vol est long et, par conséquent, plus la batterie est lourde. Le temps de vol d'un drone conventionnel peut être de l'ordre de 10 à 20 minutes, ce qui peut sembler de courte durée, mais vous devez comprendre que le drone lutte constamment avec la gravité pendant le vol, et contrairement à un avion, il n'a pas de surfaces (ailes) qui fournissent une assistance sous la forme d'une force de levage optimale.
Taux de décharge
Le taux de décharge de la batterie au lithium est mesuré en « C » où 1C est la capacité de la batterie (généralement en ampères-heures, sauf si vous envisagez un drone de la taille de Paume). Le taux de décharge de la plupart des batteries LiPo est d'au moins 5C (cinq fois la capacité), mais comme la plupart des moteurs utilisés dans les drones multirotors consomment beaucoup de courant, la batterie doit pouvoir se décharger à un courant incroyablement élevé, ce qui est généralement environ 30A ou plus.
Sécurité
Les batteries LiPo ne sont pas totalement sûres car elles contiennent de l'hydrogène gazeux sous pression et ont tendance à brûler et/ou exploser lorsque quelque chose ne va pas. Ainsi, si vous avez des doutes sur l'état de santé de la batterie, ne la connectez en aucun cas au drone ni même au chargeur - considérez-la "hors service" et jetez-la correctement. Les signes révélateurs que quelque chose ne va pas avec la batterie sont des bosses ou un gonflement (c'est-à-dire une fuite de gaz). Lors de la charge d'une batterie LiPo, il est préférable d'utiliser un coffre-fort LiPo box (Battery safe box). Le stockage de la batterie

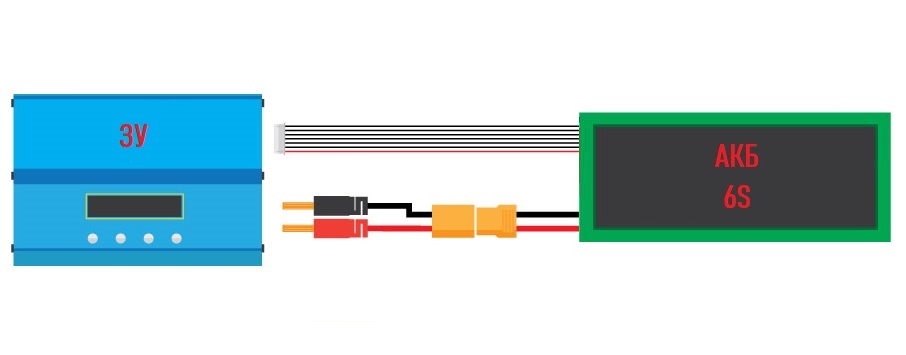
Charge
La plupart des batteries LiPo ont deux connecteursLe chargeurles problèmes de sécurité associés aux batteries lithium-polymère
.Montage
La batterie est l'élément le plus lourd du drone, elle doit donc être installée au point mort pour assurer la même charge sur les moteurs. La batterie n'implique aucun montage spécial (en particulier des vis autotaraudeuses qui peuvent endommager le LiPo et provoquer un incendie), donc certaines méthodes de montage utilisées aujourd'hui incluent des sangles velcro, du caoutchouc, des compartiments en plastique et autres. L'option de montage de batterie la plus courante consiste à accrocher la batterie sous le cadre à l'aide d'une bande Velcro.







