Contenu
- Drone DIY: Leçon 1. Terminologie.
- Drone à faire soi-même: Leçon 2. Cadres.
- Drone à faire soi-même: Leçon 3. Centrale électrique.
- Drone à faire soi-même: Leçon 4. Contrôleur de vol.
- Drone à faire soi-même: Leçon 5. Assemblage.
- Drone à faire soi-même: Leçon 6. Contrôle des performances.
- Drone à faire soi-même: Leçon 7. FPV et distance.
- Drone de vos propres mains: Leçon 8. Avions.
Introduction
Maintenant que vous avez sélectionné tous les composants principaux de votre drone, vous pouvez commencer l'assemblage. Ce guide couvrira les erreurs courantes lors de l'assemblage d'un drone multirotor, ainsi que quelques conseils utiles pour le réglage. Cette leçon ne couvrira pas des éléments tels qu'un système de caméra / FPV, des appareils à longue portée ou d'autres accessoires (nous couvrirons en 7 leçons).
Composants que vous devez avoir à ce stade:
- Cadre (acheté ou fabriqué à la main)
- Moteurs, ESC, hélices, batterie, chargeur
- Tableau de distribution électrique / harnais
- Contrôleur de vol et dispositif de communication (commande radio proposée)

Propulsion
Pour atteindre les objectifs de cette leçon, le système de propulsion de votre drone comprendra les composants suivants:
- Moteurs
- ESC
- Distribution de puissance (carte ou harnais)
- Batterie
- Contrôleur de vol
Notez que les hélices ne sont pas répertoriées. N'installez pas les hélices à ce stade! Les vis principales ne seront connectées qu'à la 6e leçon. Puisqu'il s'agit de votre premier drone, nous vous recommandons d'effectuer une connexion électrique « sans cadre » avant de tout installer sur le cadre; afin de vérifier toutes les connexions et d'éliminer les défauts identifiés.
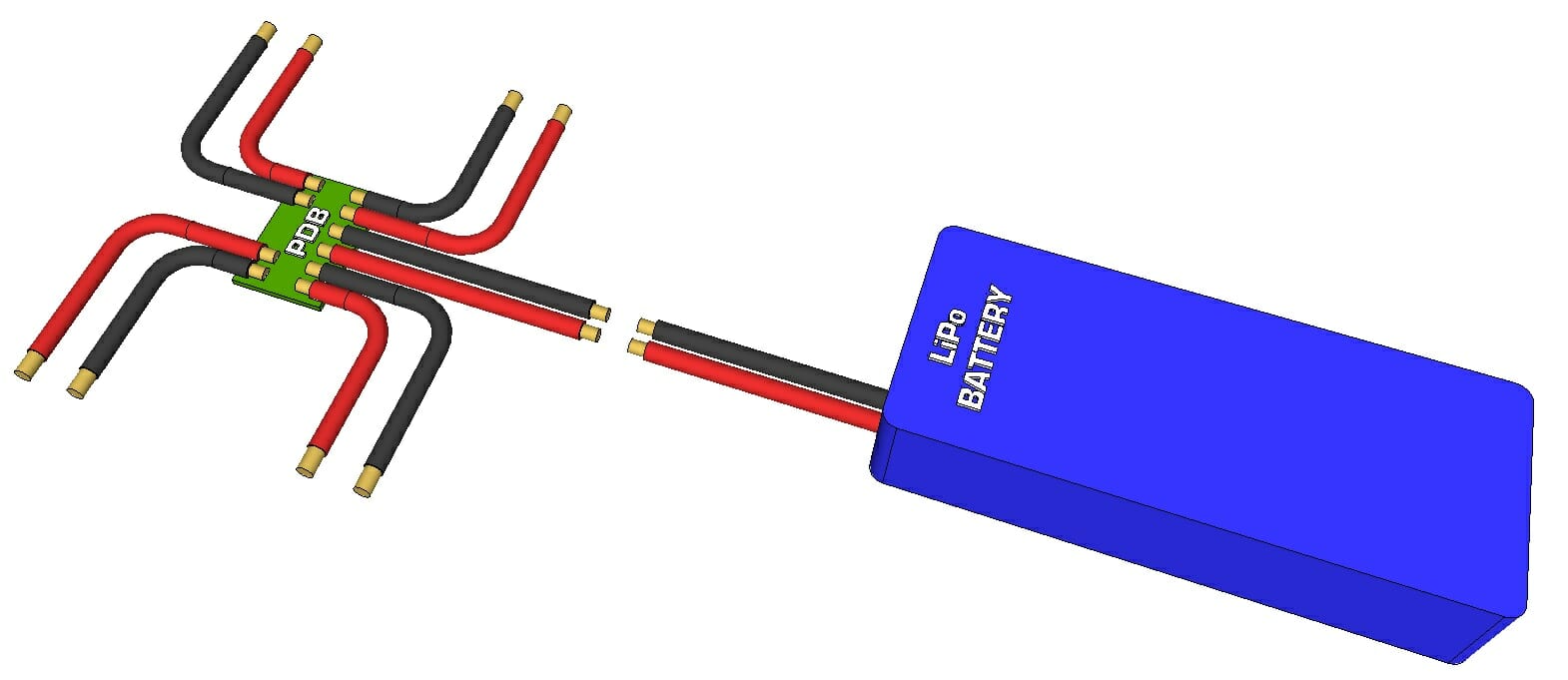
Batterie. Distribution d'énergie
La connexion entre la batterie et le système de distribution d'énergie devrait être relativement simple s'ils ont tous deux le même type de connecteur. Si tel est le cas, passez à l'étape suivante. Si les connecteurs sont différents, ne coupez en aucun cas les fils de la batterie pour séparer le connecteur; cela peut provoquer un court-circuit et un choc électrique désagréable! Au lieu de cela, vous pouvez prendre un adaptateur et l'utiliser entre le connecteur de la batterie et le connecteur de la carte de distribution d'alimentation. Une autre option peut être de rechercher un connecteur correspondant au connecteur de la batterie et de l'acheter; puis coupez le connecteur existant du distributeur d'alimentation et soudez le remplacement acheté, en vous assurant d'abord qu'il n'y a pas de connexion entre les broches positives et négatives.
Il est important de noter que la plupart des drones multi-rotors n'ont pas d'interrupteur marche/arrêt, donc l'alimentation est fournie et déconnectée en connectant et en déconnectant la batterie principale du connecteur de distribution d'alimentation, de sorte que leurs connecteurs doivent être solidement fixés et les fils/points de soudure sont bien isolés avec une gaine thermorétractable et/ou du ruban électrique.
Débranchez la batterie du distributeur d'alimentation avant de continuer.
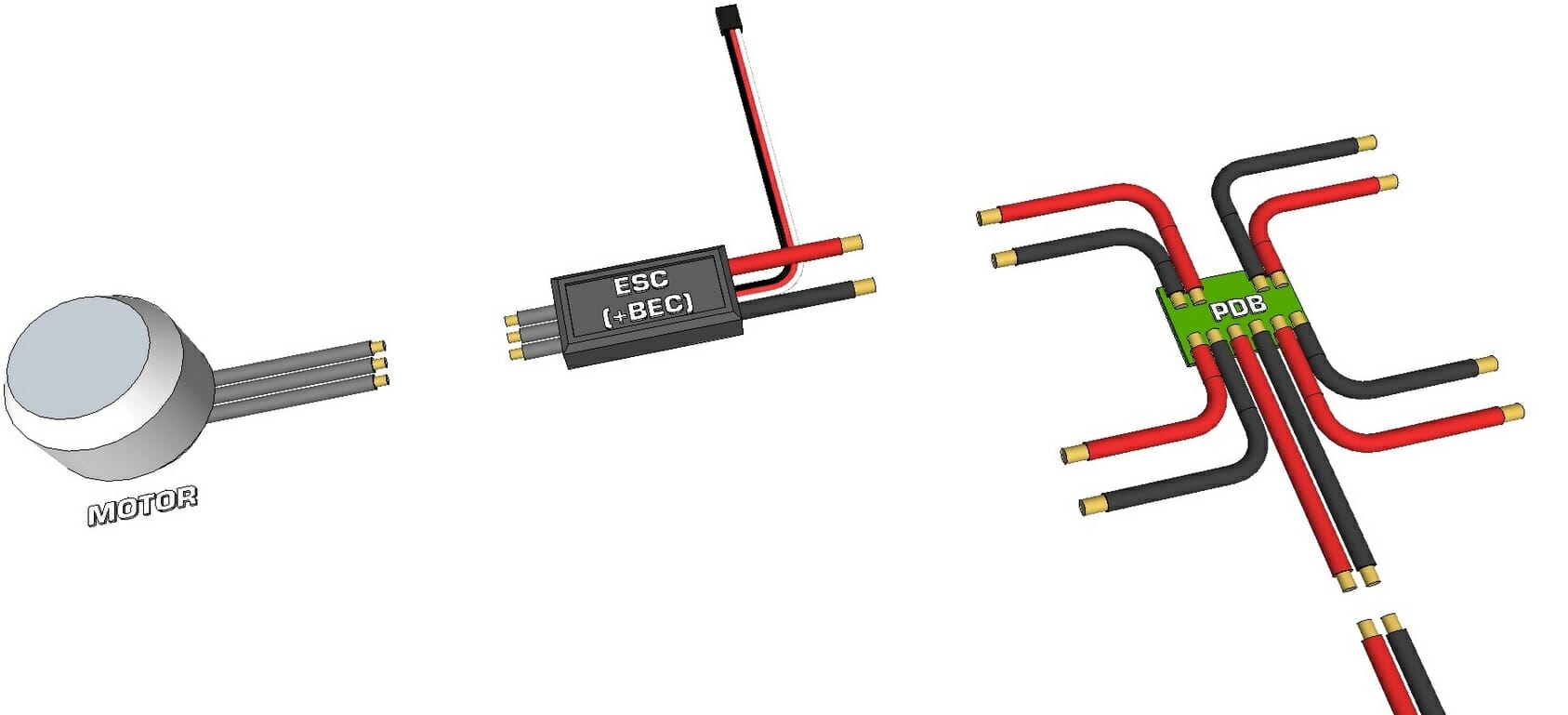
Moteur. ESC. Distribution d'énergie
La carte de distribution d'énergie (PDP) ou distribution câblée sert principalement à distribuer l'énergie de la batterie principale à chaque ESC. La tension est fournie à l'ESC telle quelle, il n'est donc pas nécessaire d'augmenter (augmenter) ou de diminuer (diminuer) la tension. Si votre drone a quatre moteurs, alors vous devriez avoir quatre ESC, et donc votre tableau de distribution/distribution de fils devrait éventuellement diviser la batterie principale en quatre connexions. Si votre PRP a six connexions et que vous construisez un quadricoptère, vous n'avez tout simplement pas besoin de connecter les deux dernières. Si vous construisez un hexacoptère, votre PDP doit distribuer l'alimentation de la batterie principale à six connexions. L'ESC comprend les fils suivants:
- Un ruban 3 fils de 0,1 pouce avec connecteur R/C, dont la broche noire est généralement mise à la terre, le rouge fournit une sortie 5V (via BEC*) et jaune / blanc est l'entrée du signal.
- Trois fils séparés se connectent aux trois fils d'un moteur à courant continu sans balai (généralement fourni avec des connecteurs femelles déjà soudés ou inclus).
- Deux connecteurs d'entrée pour connecter la batterie au PDB (certains incluent des connecteurs soudés avec soudure, certains sont inclus, et parfois pas du tout).
*Les ESC ont généralement un circuit d'élimination de batterie intégré (ou BEC) qui convertit la tension de la batterie principale en 5 V pour alimenter le récepteur et le contrôleur de vol. 5V est généralement fourni via le connecteur RC de l'ESC (généralement la broche centrale / rouge). Vous n'avez besoin que d'un BEC pour alimenter le contrôleur de vol.
Si la carte de distribution d'alimentation utilise des connecteurs qui ne correspondent pas aux connecteurs du variateur ESC ou de la batterie, vous devrez alors acheter des adaptateurs ou acheter de nouveaux connecteurs et les remplacer sur ESC ou PRP. L'avantage reste avec le tableau de distribution d'alimentation dont les connecteurs correspondent à ceux de la batterie et du variateur. Le plus souvent, une batterie lithium-polymère d'un drone peut avoir connecteur DEANSXT60EC3
Si vous souhaitez alimenter des appareils électroniques à faible courant supplémentaires (éclairage LED, suspension, etc.) mais qu'il n'y a pas de connexions de rechange sur votre tableau de distribution électrique, vous pouvez utiliser le câble de charge de la batterie. Le connecteur de charge blanc a généralement une broche pour la masse et une broche pour chaque cellule (1S, 2S, 3S, etc.) utilisée dans l'ensemble de batterie LiPo. Bien que ce connecteur ne soit vraiment destiné qu'à charger la batterie, il peut fournir une tension de sortie de 3,7 V à partir de chaque broche et peut être utilisé pour alimenter des appareils électroniques à faible courant tels qu'un faisceau ou des LED.
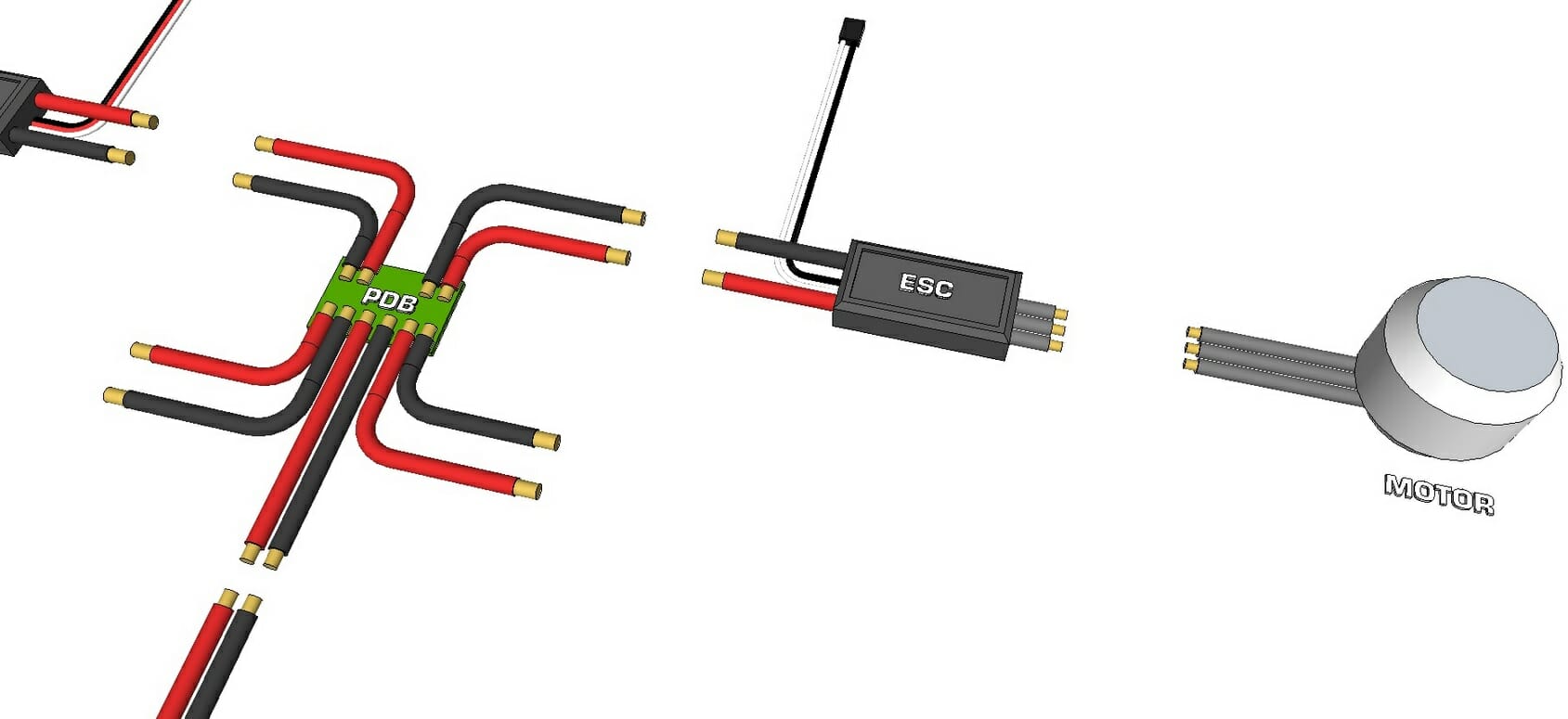
- Retirez le fil rouge de chaque connecteur R / C à 3 broches du régulateur de vitesse sauf un. Il est recommandé de le faire de manière à pouvoir toujours les rebrancher si nécessaire. Enveloppez l'extrémité de chaque fil exclu avec du ruban isolant ou utilisez un tube thermorétractable pour l'isolation afin qu'ils ne puissent pas plus tard entrer en contact avec d'autres appareils électroniques. Le seul fil rouge qui n'est pas touché alimentera le contrôleur de vol utilisé dans l'assemblage.
- Connectez les deux fils d'alimentation de chaque ESC au tableau de distribution, en vous assurant que le fil rouge passe au positif () et le fil noir au négatif (-).
- Si la carte de distribution d'alimentation que vous utilisez possède ses propres connecteurs R/C, alors dans ce cas c'est à vous de connecter les broches R/C de chaque ESC aux connecteurs R/C de cette carte ou connectez-les directement au contrôleur de vol.
- Connectez chacun des trois connecteurs du moteur aux trois connecteurs ESC. Pour le moment, l'ordre de connexion de ces connecteurs n'a pas d'importance (s'il affecte le sens de rotation, il sera corrigé si nécessaire ultérieurement).
Veuillez noter que si vous décidez de retirer ou de masquer le câblage à ce stade, vous devrez peut-être ultérieurement accéder à certaines des connexions conformément à la procédure décrite dans la leçon 6, en particulier, permutez le connexions entre l'ESC et un moteur de sorte que le moteur tourne dans le sens opposé.

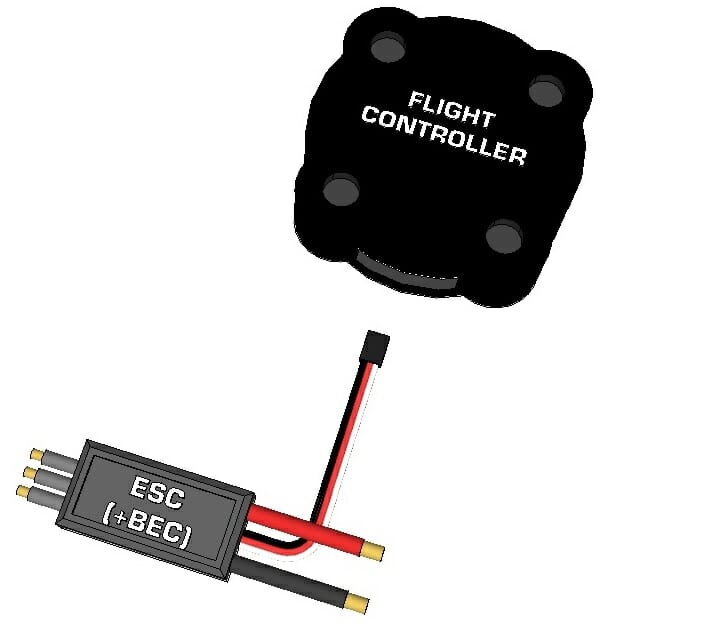
ÉCHAP. Contrôleur de vol.
Vous pouvez maintenant connecter les entrées R/C des régulateurs de vitesse au contrôleur de vol. Le contrôleur de vol que vous choisissez doit avoir un schéma qui montre quelles broches du contrôleur sont connectées aux moteurs de votre ensemble multi-rotor. Ce diagramme devrait également montrer le sens de rotation de chaque moteur, mais encore une fois, vous n'avez pas besoin de considérer le sens pour l'instant.
- Voir le schéma de connexion entre les moteurs / ESC et le contrôleur de vol dans le manuel d'instructions du PC.
- Connectez les connecteurs R / C de chaque ESC aux broches correspondantes du contrôleur de vol, assurez-vous que le fil de terre (généralement noir) se connecte à la broche de terre du contrôleur de vol et à la broche de signal (blanc ou jaune) se connecte à la broche de signal sur le contrôleur de vol...
- Un seul des connecteurs RC aura encore la broche rouge (alimentation).
Communication
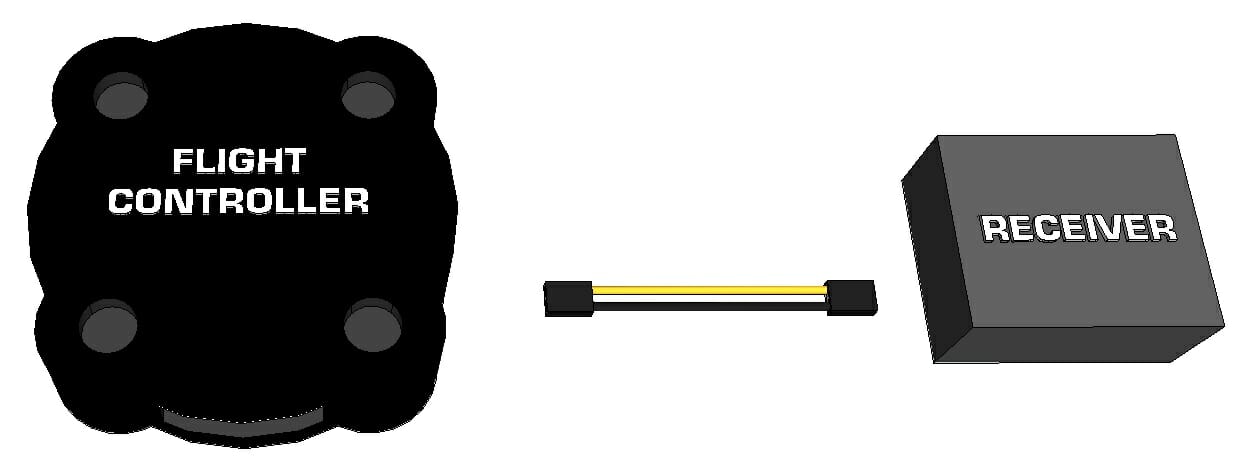
Récepteur. Contrôleur de vol.
Supposons que dans cette leçon vous ayez fait le choix en faveur de la radiocommande comme périphérique d'entrée. Si vous souhaitez utiliser le WiFi, le Bluetooth ou une autre méthode de saisie, veuillez lire le manuel du contrôleur de vol et rechercher l'entrée série; Cette section décrira comment/où connecter le périphérique d'entrée série au contrôleur de vol. Vous aurez probablement besoin de trouver et de connecter les broches de transmission (Tx), de réception (Rx), de tension (5 V) et de GND de l'appareil sans fil à l'émetteur, permettant Rx de l'un à l'autre Tx, et vice versa.
Votre émetteur RC doit être livré avec un récepteur RC approprié. Le récepteur doit être lié à l'émetteur afin que vous puissiez retirer le cavalier d'affectation du récepteur (le cas échéant). Le kit peut également inclure un support de pile AA, conçu pour alimenter le récepteur, mais nous ne l'utiliserons pas car le BEC alimentera à la fois le récepteur et le contrôleur de vol. Pour savoir quels canaux du récepteur RC se connectent à quelles broches du contrôleur de vol, vous devez consulter le manuel d'utilisation du contrôleur de vol et du système RC.
Le manuel du contrôleur de vol indiquera les emplacements des broches suivantes à apparier et à connecter au récepteur:
- Gaz
- Pas
- Yaw
- Roll
- Aux Switches 1, 2, 3, etc.
Vous pouvez maintenant effectuer les connexions suivantes:
- Lisez le manuel du contrôleur de vol pour voir quelle broche d'entrée R / C est connectée avec laquelle des fonctions ci-dessus.
- Lisez le manuel de l'émetteur pour savoir quel canal est associé à chaque fonction.
- Certains émetteurs RC peuvent être reprogrammés pour changer la fonction de chaque contact. Si vous décidez de changer une entrée (joystick ou interrupteur), ne le faites qu'après vous être assuré de savoir quel canal du récepteur correspond à quelle fonction. Les gaz, le tangage, le lacet et le roulis doivent toujours être associés à deux manettes / joysticks, et non à des commutateurs ou des boutons.
- Connectez le canal Throttle du récepteur à l'entrée Throttle du contrôleur de vol.
- Connectez le canal Pitch du récepteur à l'entrée Pitch du contrôleur de vol.
- Connectez le canal Yaw du récepteur à l'entrée Yaw du contrôleur de vol.
- Connectez GND sur le contrôleur de vol (généralement la troisième rangée de broches) à GND sur le récepteur (généralement la troisième rangée de broches).
- Si l'entrée auxiliaire est utilisée, connectez Aux 1 sur le récepteur à Aux 1 sur le contrôleur de vol, et ainsi de suite.
Vous pouvez utiliser des câbles d'asservissement à 3 broches pour chaque canal, mais un seul des canaux (peut être n'importe lequel) doit avoir une tension et une masse; le reste n'a besoin que d'un fil de signal. Toutes les connexions peuvent être GND à GND, bien qu'une seule soit requise. Encore une fois, le récepteur n'a pas besoin d'une batterie séparée car il sera alimenté par le contrôleur de vol, qui est alimenté par le BEC de l'un des ESC.
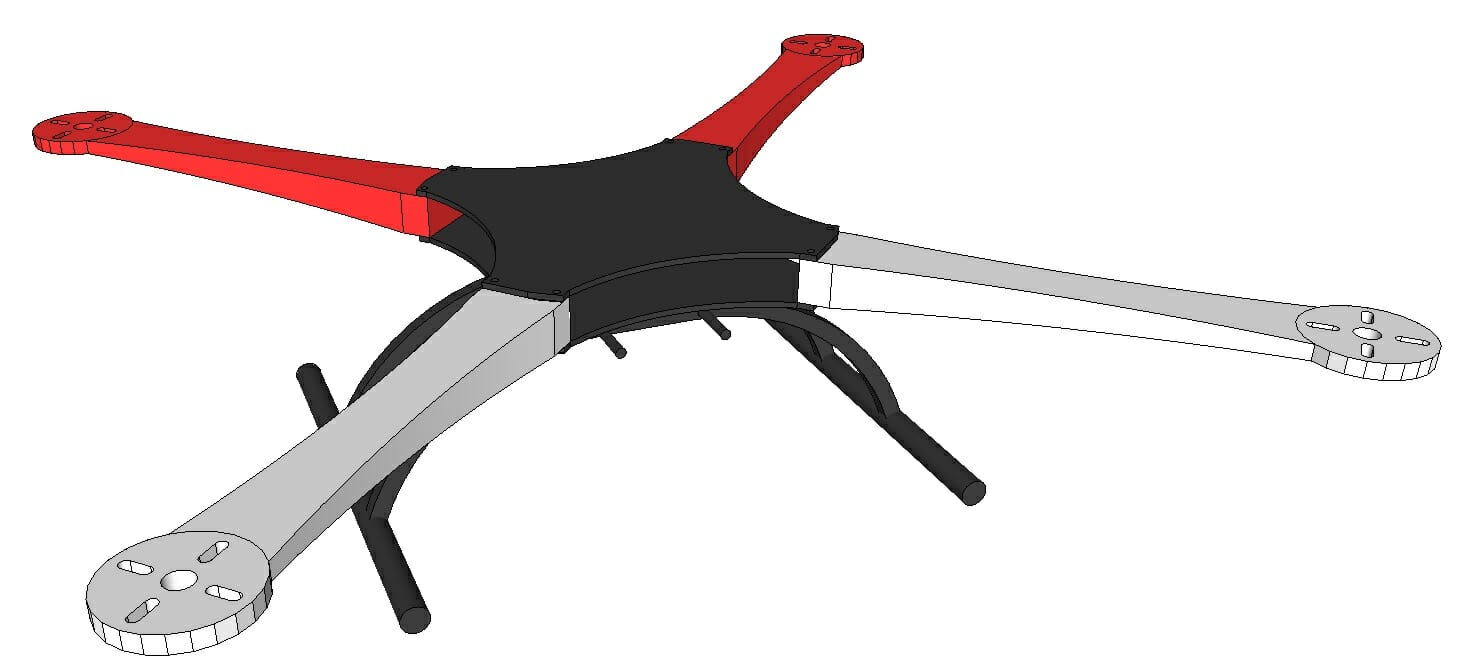
Assemblage du cadre
Si vous construisez votre propre cadre, vous pouvez l'assembler à ce stade. Si vous avez acheté un kit de cadre, suivez les instructions de montage. Veuillez noter que vous devrez peut-être démonter certaines zones afin de faciliter le raccordement ou retirer (masquer) les éléments électriques. L'objectif est de s'assurer que rien n'est desserré, que tous les fils sont solidement fixés et que rien ne peut tomber du cadre ou s'emmêler.
Installation
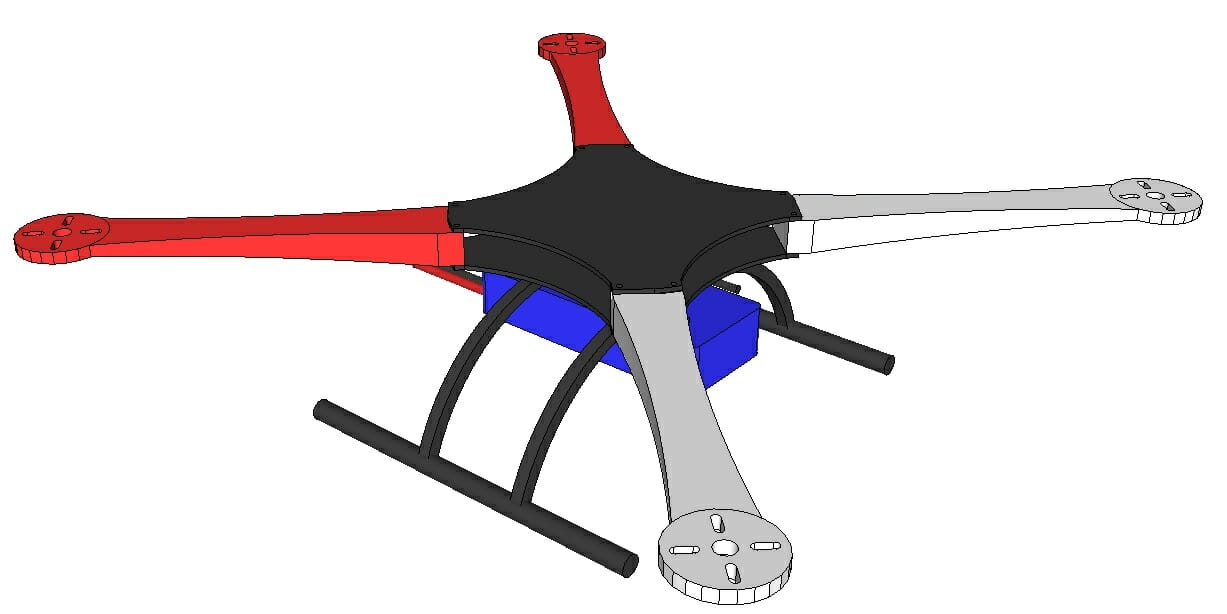
Emplacement de la batterie.
La batterie utilisée pour l'alimentation est souvent l'élément le plus lourd d'un drone et peut aller de 1/4 à 1/2 de son poids total. Par conséquent, le lieu de son installation est très important. L'emplacement idéal pour la batterie principale doit être au centre de l'avion afin que tous les moteurs puissent supporter à peu près la même charge. Si la batterie est située plus près de l'arrière de l'avion, les moteurs arrière devront fournir plus de poussée que les moteurs avant, et donc la poussée totale maximale sera limitée (lorsque les moteurs arrière sont à pleine poussée, il n'y aura pas de poussée sur les moteurs avant). Alors que l'approche habituelle dans la conception multi-rotor est de garder l'avion symétrique par rapport à un axe central (ou au moins un axe), de sorte que la batterie doit être placée le long de cet axe central plutôt que décalée d'un côté ou de l'autre...
Ensuite, vous devrez décider à quelle hauteur placer la batterie. Il y a plusieurs endroits où la batterie peut être installée:
- Sous le châssis (l'avion sera lourd en dessous, plus stable et moins acrobatique).
- Directement sous les moteurs (généralement à l'intérieur du cadre); peut-être l'un des meilleurs endroits.
- À la même hauteur que les moteurs ou les rotors (par exemple montés sur le dessus du châssis).
- Au-dessus des hélices (le drone sera plus lourd sur le dessus et plus susceptible de basculer).
Pour de meilleures performances, idéalement la batterie doit être située en position 3 ci-dessus. La position 4 crée l'effet d'un pendule inversé, et si le drone s'incline au-delà d'un certain angle, le drone aura tendance à basculer. La position 1 créera une plate-forme assez stable qui, par nature, a tendance à rester de niveau, mais qui est extrêmement inadaptée aux acrobaties. Par conséquent, la plupart des concepteurs choisissent la position 2 et placent la batterie directement sous le cadre ou à l'intérieur. Cette approche libère de l'espace sous le châssis pour les charges utiles comme le système de suspension, et de l'espace au-dessus pour que le contrôleur de vol et d'autres composants électroniques soient aussi accessibles que possible.
Montage de la batterie
Il existe de nombreuses manières courantes de fixer la batterie au cadre, notamment:
- Sangles Velcro
- Velcro autocollant (un côté collé à la batterie et l'autre au cadre)
- Dans le cadre
Les bandes Velcro sont les plus courantes pour les moyennes ” taille des drones personnalisés Alors que l'enceinte de châssis se trouve le plus souvent sur les drones commerciaux, les châssis de ces drones sont conçus sous pression et laissent de l'espace à l'intérieur spécifiquement pour une batterie spécifique. Le velcro ne doit idéalement être utilisé que si la batterie est relativement légère; au lieu d'une courte section au centre, il est recommandé de coller une bande sur toute la longueur de la batterie. Si vous utilisez des sangles Velcro et constatez que la batterie a tendance à sortir en raison d'un manque d'adhérence, il est recommandé d'ajouter des bandes de caoutchouc là où la batterie entre en contact avec les sangles. Il n'est pas recommandé d'utiliser de la colle pour fixer la batterie au cadre. Si vous n'utilisez pas de drone, retirez la batterie et rangez-la dans un sac sécurisé LiPo ou un réservoir en céramique.
Charger la batterie
Il est très probable que vous ayez choisi une batterie Lithium Polymère (LiPo) ou une autre batterie lithium. La plupart des batteries LiPo de plus de 3,7 V ont un câble de charge séparé avec un connecteur multibroches pour la charge, tandis que le câble d'alimentation peut être identifié par la présence d'un connecteur à deux broches avec des fils plus gros capables de résister à des courants de décharge élevés. Un connecteur de charge a généralement un contact pour chaque groupe de batteries, ainsi qu'un contact de masse commun.
En raison des dangers associés aux batteries LiPo (hydrogène et électricité), il est courant de retirer complètement la batterie du drone lorsqu'il n'est pas utilisé et de la placer dans un sac LiPo Safe. Le même sac est utilisé lors du chargement de la batterie (connectez la batterie au chargeur, placez la batterie dans le sac (en laissant le chargeur à l'extérieur du sac) et fermez-le (il a généralement un rabat velcro).
.Placement et montage du contrôleur de vol
Idéalement, le contrôleur de vol doit être situé au centre du drone à la même hauteur que les moteurs. Si cela n'est pas possible, le contrôleur peut être placé légèrement plus haut ou plus bas. vers la gauche ou la droite, et évitez de le monter vers l'avant ou vers l'arrière. peut être fixé de l'une des manières de base suivantes:
- Vis / Écrous / Montants (de base)
- Ruban adhésif double face (assurez-vous qu'il est suffisamment solide)
- Ruban mousse double face (pour réaliser effet d'amortissement)
- Bagues d'amortissement en caoutchouc (pour un amortissement élevé)
Certains contrôleurs de vol ont ou peuvent avoir un boîtier de protection en option.
À ce stade, vous devriez avoir un drone entièrement assemblé et connecté, à l'exclusion des hélices. La leçon 6 comprend la configuration et le test de l'émetteur, le logiciel du contrôleur de vol, la vérification avant vol et le premier vol.







