Tartalom
- DIY drone: 1. lecke. Terminológia.
- Csináld magad drón: 2. lecke. Keretek.
- Csináld magad drón: 3. lecke. Erőmű.
- Csináld magad drón: 4. lecke. Repülésvezérlő.
- Csináld magad drón: 5. lecke.
- Csináld magad drón: 6. lecke.
- Csináld magad drón: 7. lecke. FPV és távolság.
- Drone saját kezűleg: 8. lecke Repülőgépek.
Bevezetés
Az 5. leckében be kellett fejeznie a drón összeszerelését (légcsavarok felszerelése nélkül). Szánjon rá időt, mert még az apró hibák is összeomláshoz vezethetnek. Még van néhány lépése az első repülés előtt, ezért legyen türelmes és kövesse az alábbi irányelveket. Az előző leckéhez hasonlóan továbbra is feltételezzük, hogy rádióvezérlő berendezéseket használ az UAV -val való interakcióhoz (mint a jelenleg legszélesebb körben használt vezérlőmódszer).
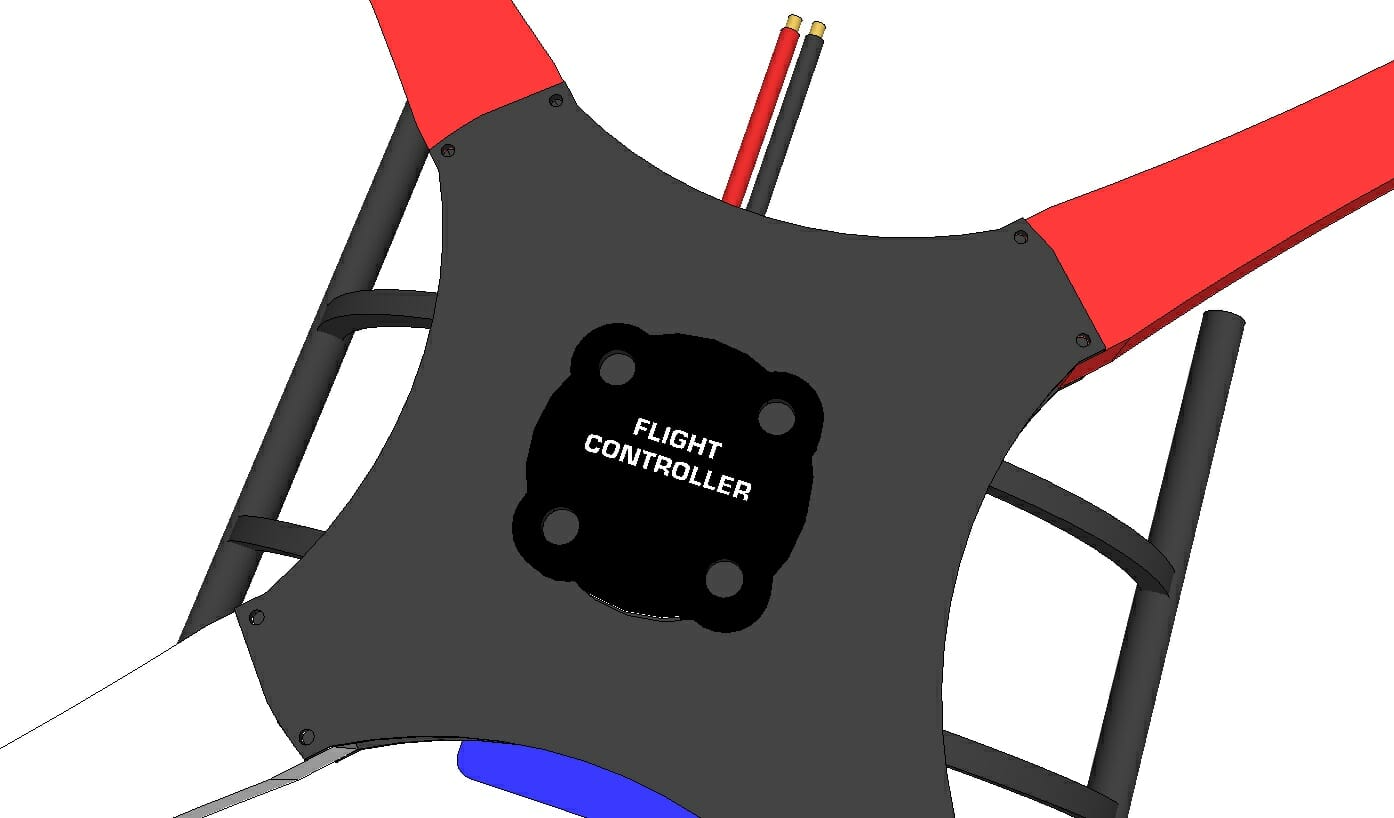
Repülésvezérlő
- Nem minden repülésvezérlő egyforma, így a beállítási eljárás valóban a választott modelltől függ. Ha még nem tette meg, szánjon időt arra, hogy alaposan olvassa el a kiválasztott repülésirányító használati utasítását az elejétől a végéig. A legapróbb részletek kihagyása is különbséget tesz az első sikeres repülés és a teljes leírás között. Egy jól megírt felhasználói kézikönyvnek tartalmaznia kell mindent, amit ezen az oldalon talál, és még sok mást, ezért ajánlott ezt az oktatóanyagot ellenőrző listaként használni, nem pedig az alapvető fejlesztői utasítások helyettesítőjeként.
- A legtöbb repülésirányító lépésről lépésre biztosítja az adott UAV-konfiguráció beállításainak kiválasztását, beleértve a PID-értékek teljes ellenőrzését. Az egyes értékek (P, I és D) az adott kerethez és repülési stílushoz igazíthatók; valami stabilabbtól a platform légifotózáshoz való használatához, vagy valami hasonlóbbhoz, mint a sportrepülések (bukfencezés, drónverseny stb.). Általában minden mező alapértelmezett értékeivel kezdődik, és ha nincs elegendő tapasztalata a módosításokhoz, akkor javasoljuk, hogy hagyjon mindent az első repülésig.
- A repülésirányító kézikönyvének tartalmaznia kell azt is, hogyan kell beállítani a hajtómű minimális fordulatszámát, azaz beállítani azt a sebességet, amellyel a motorok a terheléskor forognak. Kezdetben viszonylag alacsonyra állíthatja ezt az értéket - éppen elég ahhoz, hogy lássa a motorok forgását, de nem annyira, hogy az UAV -kat az általuk létrehozott tolóerő mozgassa. Ha beállítja ezt az értéket, a maximális tolóerőnek meg kell egyeznie a vezérlőmű fojtószelepének maximális értékével.
- Az egyik szempont, amelyet a repülésirányító felhasználói kézikönyvében javaslatok nélkül lehet tárgyalni, a repülési mód. Visszatérve 4. lecke, a „Repülési mód” határozza meg, hogy mely érzékelőket használják a drón stabilizálására, valamint annak funkcióját / célját. A repülésvezérlőn található leggyakoribb érzékelők a giroszkóp, a gyorsulásmérő, a barométer, az iránytű és esetleg a GPS.
- Ha ez az első drónja, erősen ajánlott, hogy a lehető legstabilabb repülési mód álljon rendelkezésre a repülésirányító számára, amely a rendelkezésre álló legtöbb érzékelőt használja a drón stabilizálásához. Általában ez azért van, mert a PID -szabályozó beállításai túl messze lehetnek a keretétől / beállításaitól, ezért a legjobb, ha az alapértelmezett PID -szabályozó értékeket választja. Ha már repült, az ACRO mód (amely csak a giroszkópot használja) lehet a legjobb.
- A legtöbb repülésirányító lehetővé teszi a „repülési mód” megváltoztatását repülés közben egy tartalék csatornán keresztül. Például, ha a távirányító hat csatornával rendelkezik, fontolja meg az 5. vagy 6. csatorna hozzárendelését (amelyek gyakran kapcsolódnak kapcsolókhoz), hogy a drón repülése közben megváltoztassa a repülési módot. Repülés előtt győződjön meg arról, hogy melyik kapcsolóállás melyik repülési módnak felel meg.
- Erősen ellenjavallt a GPS hotspot repülés vagy bármely kifinomultabb funkció / érzékelő használata (például egy ultrahangos távolságérzékelő a földtől való távolság meghatározásához), amíg meg nem győződik arról, hogy az UAV jól be van hangolva. Egyes kézikönyvek csak az ACRO (akrobatikus) mód használatát javasolják, azonban ha nem rendelkezik jelentős repülési tapasztalattal, ebben a módban a repülés fizikailag nem lesz lehetséges, az üzemmód a legnehezebben vezérelhető, mivel a stabilizálás kizárt.
Vezérlőberendezések konfigurálása
- Egyes konzolok különböző működési módokkal rendelkeznek, például repülőgép, helikopter, autó stb. A 4 -ben (Szakasz: Vezérlés) a négy fő vezérlőcsatornát tárgyaltuk: a fojtószelep, az elfordulás, a emelkedés és a gördülés, amelyek általában repülőgépekkel vagy helikopterekkel kapcsolatos értékek. Ha a repülésvezérlő kézikönyvében nincs meghatározott üzemmód az adó számára, akkor ajánlott a Repülőgép üzemmód használata.
- Kétféle távirányító létezik: 1. mód (1. mód) és 2. mód (2. mód). A 2. mód (leggyakoribb) az ilyen típusú vezérlésnél a bal csatorna / bot / joystick, a Pitch and Roll a jobb oldali kapcsolóhoz tartozó fojtószelep és lendület. A hozzárendelésüket a pálcák közvetlen mozgatásával is ellenőrizheti, hogy az értékek ne legyenek megfordítva.
45 és mint ilyen, előnyben részesítik a "nyers" értékeket. Ha az adó nem rendelkezik semmilyen üzemmóddal, ellenőrizze, hogy melyik csatorna / bot / botkormány felelős.
- Egy általános célú RC távadó csak korlátozott számú jelet tud biztosítani minden csatornán, ezért ebben a leckében azt tanácsoljuk, hogy megtudja, milyen értéktartományt tud nyújtani egy RC adó, és hogy a minimális és a maximális értékek módosíthatók (vagy értékként vagy az alapértelmezett tartomány százalékában). Például a MultiWii alapú repülésvezérlők olyan távadókat igényelnek, amelyek 500 ms és 2500 ms közötti impulzusok teljes skáláját képesek biztosítani, míg az alapértelmezett beállítás csak 1000 ms és 2000 ms között lehet, mivel ez az R / C repülőgépek általános konfigurációja. Olvassa el az adó kézikönyvét a jel végpontok / tartomány beállításáról (ha van).
- Ha a vezérlő LCD kijelzővel rendelkezik, ezt gyakran megteheti a „Beállítások” alatti felületen.
- „A vezérlőberendezés vizsgálata max. Távolság ”a legegyszerűbb egy barát / segítő segítségével megvalósítani, vagy csengőt vagy más vizuális / hallható visszajelzést csatlakoztatni az RC drónhoz. Egyes felső kategóriás modellek tartományteszt funkcióval rendelkeznek. A teszt célja, hogy lássa, milyen messzire megy a jel, mielőtt a vevő már nem tudja felvenni. Javasolt a hatótávolság vizsgálatát csak az úgynevezett "harci repülés" után (harci repülés-a drón teljesítményét rövid távolságon, a pilóta-drón látótávolságán belül tesztelik). Távolságvizsgálati eljárás:
- Kapcsolja be a vezérlőberendezést, majd a repülőgépet.
- Lépjen hátra 15 métert, és aktiválja a hangjelzőhöz tartozó kapcsolót; Hallani kell őt.
- Ha nincs zümmere, kapcsolja be a repülőgépet, és győződjön meg arról, hogy a motorok járnak.
- A hangjelző elnémítása / a drón újbóli élesítése
- Ismételje meg ezeket a lépéseket egyre tovább (látómező), amíg a drón nem reagál az Ön beadására.
- Ez lesz az abszolút maximális távolság, amellyel drónját repülheti.
- Azt gondolhatja, hogy nem tervezi olyan messzire repülni, de ne feledje, hogy a drón három tengelyben mozog, és valami baj történhet.
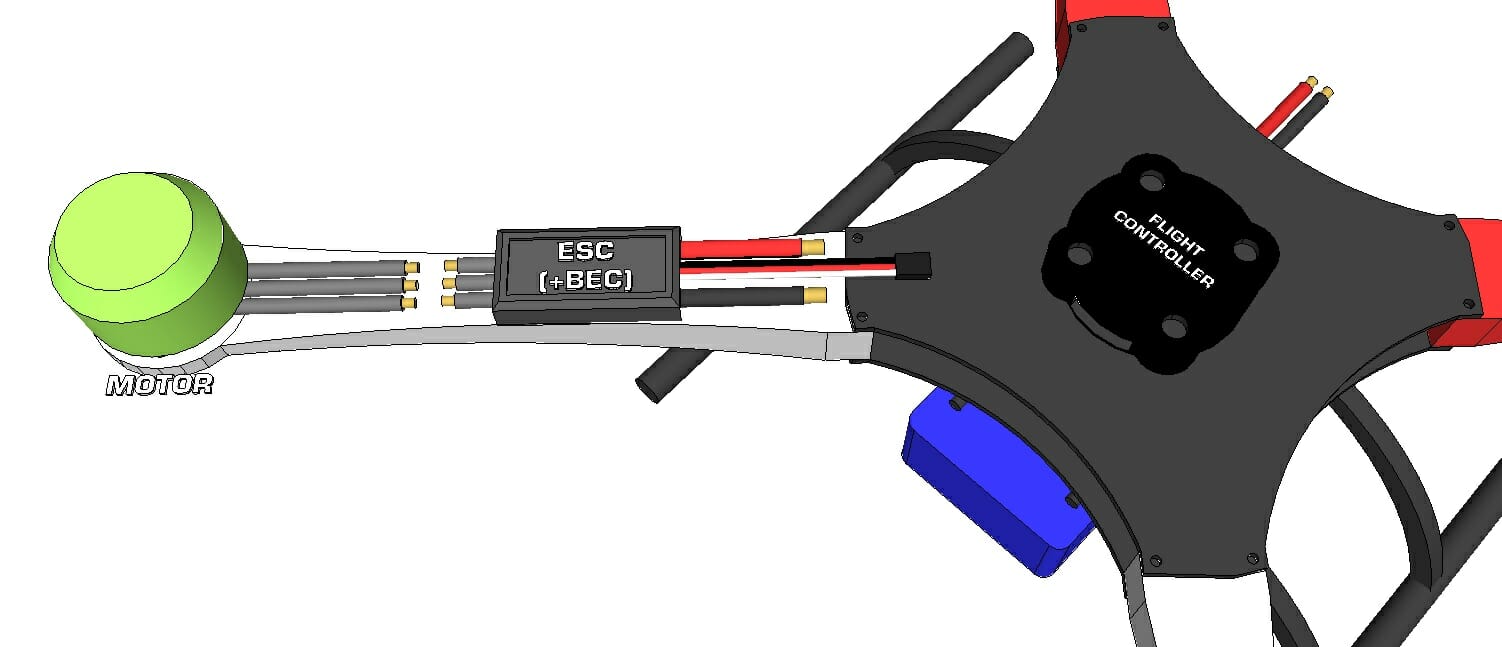
ESC kalibrálás
Az ESC a dobozon kívül fog működni, de előfordulhat, hogy a minimális és maximális gázhoz tartozó jelek (PWM / PWM) nem egyeznek meg a az adóját. Ezért az egyes ESC -ket a szükséges értékekkel kell "kiképezni". Győződjön meg arról, hogy a légcsavarokat nem szerelték fel a motorokra. Olvassa el a repülésirányító felhasználói kézikönyvét. Az újraprogramozás után az ESC megőrzi jelenlegi konfigurációját akkor is, ha nincs áram alatt. Ezért minden ESC csak egyszer programozható, a kezdeti teszt / beállítás során.
A repülésirányító kézikönyvében általában található egy szakasz, amely elmagyarázza az ESC kalibrálását és elmagyarázza, hogyan kell ezt megtenni. Ha nem, akkor próbálja ki az alább javasolt módszerek egyikét. Még egyszer: ha még nem távolította el a propellereit, akkor itt az ideje.
Távadó
- Csatlakoztasson egy ESC -t a vevőegység fojtószelepéhez. Ha az ESC-hez nincs csatlakoztatva BEC, akkor csatlakoztathat egy BEC-kompatibilis ESC-t a vevő másik tűjéhez (például az akkumulátor bemenetéhez), hogy egyszerűen táplálja a vevőt.
- Csatlakoztassa az ESC -t a megfelelő motorhoz (ha még nincs csatlakoztatva).
- Állítsa a fojtószelephez tartozó botot / botkormányt maximumra (általában a bal bot / joystick és teljesen előre / fel), majd kapcsolja be az adót.
- Csatlakoztassa a LiPo akkumulátort a tápegységhez vagy közvetlenül ehhez az ESC -hez (ha a csatlakozók kompatibilisek).
- A motornak háromszor sípolnia kell (11,1 V LiPo), majd rövid szünetet, majd két rövid hangjelzést (ez a maximális hangjelzés).
- Rövid sípolás után azonnal állítsa a fojtószelep / botkormányt a legalacsonyabb helyzetbe (ez a minimális hangjelzés).
- A motornak háromszor sípolnia kell (11,1 V LiPo), majd egy hosszú hangjelzést.
- Ennek az ESC -nek a fojtószelep -tartománya be van állítva, lépjen tovább a következőre, amíg az összes ESC -t kalibrálja.
Egyéb módszerek
Kövesse a termék felhasználói kézikönyvében található utasításokat, hogy az ESC bemeneti jel minimális / maximális tartománya megfeleljen a távadótól.
- USB: Egyes ESC modellek USB -n keresztül programozhatók, függetlenül vagy adapterrel.
- Programozótábla: Külső ESC Programozó Testület, szinte minden ESC-vel használható, és önálló eszköz.
- Mikrokontroller: Ezt a módszert nem használják széles körben, de minden bizonnyal lehetséges az ESC mikrokontrollerrel történő újraprogramozása, ha rendelkezik a megfelelő kóddal és megfelelően tud csatlakozni.
- Repülésvezérlő: Egyes repülésvezérlők lehetővé teszik az ESC -k kalibrálását vagy programozását a programozási felületükön keresztül. Olvassa el a repülésirányító utasításait, hogy megtudja, lehetséges -e ez.
Motor és fő rotor (propeller). Irány.
Most már készen áll a propellerek felszerelésére. Térjünk vissza a 3 leckéhez, amely a főrotor forgásirány létrehozásának irányát tárgyalja. Minden légcsavar felső és alsó, valamint CW (óramutató járásával megegyező) és CCW (óramutató járásával ellentétes) forgásirányú. A támasz tetején általában szöveg található, amely jelzi annak magasságát és átmérőjét. Amikor a légcsavart a motor tengelyére szerelik, ez a felső rész az ég felé mutat, függetlenül attól, hogy a motort a drónnyaláb tetejére vagy a drón aljára szerelik -e fel.

Pilóta előtti repülési ellenőrzőlista
Bár a drón nem olyan bonyolult vagy veszélyes, mint egy igazi kereskedelmi repülőgép, Ön - mint pilóta és rendelkeznie kell a repülés előtti ellenőrző listával annak biztosítására, hogy a közelgő járat ne veszélyeztesse az embereket vagy a vagyont. Az alábbi lista csak a legfontosabb dolgokat tartalmazza, és minden repülés előtt el kell végezni (nem csak az első előtt).
- Győződjön meg arról, hogy rendelkezik bármilyen vizuális eszközzel annak megállapítására, hogy a drón melyik oldala van elöl. Legalább tegyen színes szalagot a két elülső gerendához.
- Ellenőrizze, hogy a vezérlőberendezés akkumulátora fel van -e töltve.
- Enyhén rázza fel az UAV -t - semmi sem lazulhat, csöröghet és nem eshet a földre. Soha nem tudhatod, hogy mit lehet elmozdítani vagy eltörni egy korábbi járat kemény leszállása miatt.
- Győződjön meg arról, hogy a légcsavarok továbbra is biztonságosan vannak rögzítve.
- Először kapcsolja be a vezérlőberendezést, majd kapcsolja be a drónt (tartsa távol a kezét a forgórészektől).
- Győződjön meg arról, hogy megbízhatóan élesítheti és újra élesítheti a motorokat („Élesítés” esetén alacsony fordulaton kell forogniuk, és „hatástalanításkor” meg kell szüntetniük a pörgést)
- Győződjön meg arról, hogy kalibrált vagy az érzékelők jók kalibrált (ezt rendszeresen meg kell tennie)
- Ellenőrizze az adó hatótávolságát.
- Győződjön meg arról, hogy a repülési terület teljesen tiszta, és ha valaki tartózkodik rajta, értesítse erről, különösen a kíváncsi gyerekeket; hogy az UAV -val repül, és hogy addig ne közelítsen, amíg a drón leszáll, és a motorok teljesen leállnak.

Tesztelés
Amíg nem éri el kellő bizalmát képességeiben, mint pilóta és dróntervező, a következő eljárás mindenkinek javasolta a pilóta nélküli légi járműveket az első repülés előtt.
- Kapcsolja be a hajtóműveket, és győződjön meg arról, hogy a repülésirányító kézikönyvében leírtaknak megfelelően forognak -e.
- Nagyon lassan emelje fel a gázkart vagy a joystickot, és győződjön meg arról, hogy a légcsavarok a levegőt a talaj felé nyomják. A selyempapír használata biztonságos lehetőség a vizuális ellenőrzésre.
- Nagyon óvatosan mozgassa a Pitch botot / joystickot előre / hátra, hogy megbizonyosodjon arról, hogy a drón megfelelően előre / hátra dől.
- Nagyon óvatosan mozgassa a tekercset / botkormányt mindkét oldalra, hogy megbizonyosodjon arról, hogy a drón megfelelően reagál.
Ha a drón nem megfelelően viselkedik, számos oka lehet, amelyek közül a leggyakoribbak a következők:
- Egy vagy több motor rossz irányba forog.
- A repülésvezérlő nincs megfelelően telepítve, és az, amit "előre" tekint, eltér a fizikai UAV -tól.
- Egy vagy több érintkező a vevő és a repülésvezérlő között nincs megfelelően csatlakoztatva, vagy nem a megfelelő helyen.
- Lehet, hogy minden helyesen van beállítva, csak túl gyorsan vagy túl hirtelen ahhoz, hogy válaszoljon a felhasználói bejegyzésekre.
Vészhelyzeti terv
, amely csak a terepen és / vagy egy új drónnal kezdi el a munkát. Az alábbi lista célja, hogy elgondolkodjon, és néhány ötletet adjon arra, hogyan és miért válaszoljon a törekvő pilótákra. A döntés eseti alapon születik, és bizonyos helyzetekben ellentmondhat az itt javasoltnak. Tehát ismerje meg önmagát, ismerje meg környezetét, és legyen óvatos! Szinte minden esetben jobb lesz elveszíteni a drónt, mint kockáztatni, hogy emberrel vagy vagyonnal ütközik.
A drón nagyon messze van, és nem tudja, melyik irányba.
- Csökkentse a gázkart, és figyelje meg, hogy a drón válaszol -e (ellenőrzi, hogy van -e kommunikáció).
- Ha a drón reagál a gázra, próbálja meg pontosan ott leszállni (ha lehet).
- Ha ez a hely nem alkalmas leszálláshoz, óvatosan próbálja meg előre irányítani a drónt (semmi drasztikus), és ha a drón az Ön helyzetére támaszkodva reagál, akkor az égen balra vagy jobbra mozogva meghatározhatja annak orientációja. Ha úgy tűnik, hogy nem balra vagy jobbra mozog, akkor lehet, hogy feléd vagy távol van tőled, ezért vond vissza az imént tettet, és próbálj balra súrolni.
A drón hirtelen élesen letér az útról (indokkal vagy ok nélkül).
- Ha nem vagy jártas a pilótázásban (megpróbálod helyreállítani), akkor teljesen engedd le a gázkart, és hagyd leereszkedni: ebben az esetben a radikális cselekvés megfontolása a látás elvesztéséhez vezethet a drón, vagy ami még rosszabb, a drón nagyobb távolságból elkezd mászni, hogy zuhanjon.
A drón gyorsan halad az emberek felé.
- Gázt maximálisan, hogy magasságot érjen el és átrepüljen felettük; a drónja valószínűleg továbbra is a helyes általános irányban lesz, ezért jobb elveszíteni a drónt, mint berepülni az emberekbe.
- Az optimális magasság elérése után próbálja meg visszanyerni az irányítást, majd úgy helyezze el, hogy a tiszta leszállási terület felett legyen.
A drón gyorsan feléd halad.
- Gáz nullára; hadd döngölje a talajt, minthogy a fejedbe repüljön.
A drón nem reagál a vezérlőberendezés bemenetére.
- Ebben az esetben nem tehet semmit. Ha a drónja még mindig a levegőben van, akkor a távirányító elemei lemerülhetnek.
A drón elveszíti a légcsavart.
- A légcsavar elvesztése hatással van a tolóerőre és az elfordulásra is; először próbálja kiegyenesíteni az elfordulást (valószínűleg a szélső helyzetben kell tartani a botot / botkormányt a szélső helyzethez csatlakoztatva), majd ezzel egyidejűleg óvatosan mozgassa felfelé a gázkart / fojtószelepet az ütközés elkerülése érdekében, majd a fojtószelepet lefelé.
Első járat
Függetlenül a korábbi repülési tapasztalattól, az első repülésnek, különösen az egyedi többmotoros UAV-val, a lehető legdiszkrétebbnek kell lennie. Az első járat célja annak biztosítása, hogy minden megfelelően legyen beállítva; valamint a súlyos problémák azonosítása.
- Elhelyezkedés: nyílt terület, távol épületektől, emberektől és vagyontól. Például: egy üres focipálya, baseballpálya stb. Ideális lenne. Egyáltalán nem lehet szél.
- Nézze át a pilóta repülés előtti ellenőrző listáját.
- Álljon körülbelül 2 méterre a dróntól úgy, hogy a drón eleje Ön felé nézzen.
- Élesítse a motorokat.
- Óvatosan mozgassa felfelé a gázkart / botkormányt. Érje el azt a pontot, ahol a drón készen áll a felszállásra. Lehetnek olyan földi hatások, amelyek miatt a drón kissé felpattan, de ne aggódjon.
- Adjon hozzá fojtószelepet, hogy leszállítsa a drónt a talajról, és hozzászokjon a kezelőszervekhez - próbálja meg egy bizonyos sugarú körön belül tartani, és nézze meg, hogyan reagál a bot / joystick mozdulataira.
- Végezzen apró, fokozatos és folyékony mozgásokat - semmi túl hirtelen. A baleset elkerülése érdekében engedje le a gázkart.
- Ha drónja nem az elvárt módon viselkedik (például a "Pitch" tengely mozgatása a magasságához vezet, valamint balra vagy jobbra gurul), valami nincs rendben, és meg kell találnia a az azonosított problémák okai...
- Ha a drón a várt módon viselkedik, akkor az a feladata, hogy stabilan tartsa pozícióját a talajtól számított 1,2-2 méter magasságban. Ne haragudj ilyen gyorsan.


.További járatok
Most, hogy kidolgozta a hibákat és a repülést kényelmesen, ellenőrzött környezetben folytathatja a második repülést.
- Mivel a drón még mindig nincs teljesen tesztelve, javasoljuk, hogy végezze el a teljes repülés előtti eljárást az első repüléshez, ami nem tarthat sokáig.
- Sima mozdulatokkal szokja meg, hogy a drón hogyan reagál a bot / bot mozdulataira azáltal, hogy biztonságos távolságban tartja.
- A drón vezetéséhez való alkalmazkodást az FPV és a különböző érzékelők segítsége nélkül kell elvégezni.







