Tartalom
- DIY drone: 1. lecke. Terminológia.
- Csináld magad drón: 2. lecke. Keretek.
- Csináld magad drón: 3. lecke. Erőmű.
- Csináld magad drón: 4. lecke. Repülésvezérlő.
- Csináld magad drón: 5. lecke.
- Csináld magad drón: 6. lecke.
- Csináld magad drón: 7. lecke. FPV és távolság.
- Drone saját kezűleg: 8. lecke Repülőgépek.
Bevezetés
Most, hogy kiválasztott vagy felépített egy keretet, a következő lépés a megfelelő hajtáslánc kiválasztása. Mivel a meglévő drónok többsége elektromos, ezért a kefe nélküli egyenáramú motorokon keresztül tisztán elektromos meghajtás előállítására összpontosítunk. Az erőmű motorokat, forgórészeket (propellerek, rövidített támaszok), ESC -t és akkumulátort tartalmaz.
1. Motor
Az összeszerelés során használt motoroktól függ, hogy a drón mekkora maximális terhelést képes felemelni, valamint hogy mennyi ideig lehet repülés közben. Az erőműnek szükségszerűen azonos márkájú és modellű motorokból kell állnia, ez a megközelítés biztosítja a kiegyensúlyozott működést. Meg kell jegyezni, hogy még az abszolút azonos (márka / modell) motoroknál is előfordulhat kicsi sebességkülönbség, amelyet később a repülésirányító kiegyenlít.
Szálcsiszolt és kefe nélküli
A szálcsiszolt motoroknál a tekercselt forgórész az állórész belsejében forog, amelyre a mágnesek mereven vannak rögzítve. Kefe nélküli motoroknál minden a fordulaton van; a tekercs mereven rögzítve van az állórész belsejéhez, és a mágnesek a tengelyre vannak szerelve és forognak. A legtöbb esetben csak a kefe nélküli egyenáramú motorokat (BC) veszi figyelembe. Az ilyen típusú motorokat széles körben használják az amatőr rádióiparban a helikopterektől és repülőgépektől kezdve az autók és csónakok meghajtórendszerei közötti termékek összeszereléséhez.
A palacsintakefe nélküli motorok nagyobb átmérőjűek, laposabbak, általában nagy nyomatékkal és alacsonyabb KV -vel rendelkeznek (részletek alább). A kis méretű UAV-ok (általában tenyérnyi méretűek) gyakran kisméretű szálcsiszolt motorokat használnak alacsonyabb költségeik és egyszerű kétvezetékes vezérlőjük miatt. Míg a kefe nélküli motorok különböző méretekben és specifikációkban kaphatók, a kisebb méret választása nem jelenti azt, hogy olcsóbb lesz.

Inrunner vs Outrunner
Többféle kefe nélküli egyenáramú motor létezik:
- Inrunner egy belső forgórész. A tekercs az állórészhez van rögzítve, a mágnesek a forgórész tengelyére vannak szerelve, amely forog (általában RC csónakokon, helikoptereken és autóknál használják a magas KV miatt).
- Outrunner - külső rotor. A mágneseket egy állórészhez rögzítik, amely egy forgó tekercs körül forog. A motor alja rögzített.(általában az ilyen típusú motorok nagyobb nyomatékkal rendelkeznek).
- Hybrid Outrunner - Ez technikailag "Outrunner", de "Inrunner" csomagban van megvalósítva. Ez a megközelítés lehetővé tette az "Outrunner" nyomaték és a külső forgó elemek hiányának egy típusban való kombinálását, mint az "Inrunner" típusú motorokban.
KV
KV minősítés - max. a fordulatok száma, amelyet a motor egy adott feszültség mellett teljesítményveszteség nélkül képes kifejteni. A legtöbb többrotoros UAV esetében az alacsony KV-érték (például 500-ról 1000-re) releváns, mivel ez segít a stabilitás biztosításában. Míg az akrobatikus repülésnél az 1000 és 1500 közötti KV érték lesz releváns, a kisebb átmérőjű rotorokkal (propellerek) együtt. Tegyük fel, hogy egy adott motor KV értéke 650 fordulat / perc, majd 11,1 V feszültség mellett a motor a következő sebességgel forog: 11,1 × 650 = 7215 fordulat / perc, és ha a motort alacsonyabb feszültséggel használja (mondjuk 7,4 V)), akkor a forgási sebesség a következő lesz: 7,4 × 650 = 4810 fordulat / perc. Fontos azonban megjegyezni, hogy az alacsony feszültség használata általában nagyobb áramfelvételt jelent (teljesítmény = áram × feszültség).
Tolóerő
Egyes kefe nélküli motorok gyártói a specifikációban megadhatják a motor által az ajánlott fő rotorral együtt generált maximális lehetséges tolóerőt (tolóerőt). A tolóerő mértékegysége általában kilogramm (Kg / Kg), font (Lbs) vagy Newton (N). Például, ha quadrocoptert épít, és tudja, hogy egyetlen motor tolóerő értéke = legfeljebb 0,5 kg egy 11 hüvelykes rotoros rekeszben, akkor a kimenetnél négy ilyen motor emelhető maximális tolóerő mellett: 0,5 kg × 4 = 2 kg. Ennek megfelelően, ha a quadcopter össztömege valamivel kevesebb, mint 2 kg, akkor egy ilyen erőművel csak maximális fordulaton (max. Tolóerő) fog felszállni. Ebben az esetben releváns lesz vagy egy erősebb rotoros motorcsomag választása, amely nagyobb tolóerőt biztosít, vagy csökkenteni kell a drón össztömegét. Max. az erőmű tolóereje = 2 kg, a drón súlya nem lehet több, mint ennek az értéknek a fele (1 kg, beleértve a motorok tömegét is). Hasonló számítás végezhető el minden konfigurációnál. Tegyük fel, hogy a hexakopter súlya (beleértve a keretet, a motorokat, az elektronikát, a tartozékokat stb.) 2,5 kg. Ez azt jelenti, hogy minden ilyen motorhoz tartozó motornak biztosítania kell (2,5 kg ÷ 6 motor) × 2 = 0,83 kg tolóerőt (vagy többet). Most már tudja, hogyan kell kiszámítani a motorok optimális tolóerejét a teljes súly alapján, de mielőtt döntenénk, javasoljuk, hogy ismerkedjen meg az alábbi szakaszokkal.
További szempontok
- Csatlakozók: Az egyenáramú szálcsiszolt motorok két "" és "-" csatlakozóval rendelkeznek. A vezetékek helyenkénti cseréje megváltoztatja a motor forgásirányát.
- Csatlakozók: A kefe nélküli egyenáramú motorok három csatlakozóval rendelkeznek. A csatlakoztatásukról, valamint a forgásirány megváltoztatásáról megtudhatja az alábbi ESC részt.
- Tekercsek: A tekercsek befolyásolják a motorok KV -jét. Ha a legalacsonyabb KV értékre van szüksége, de a nyomatékot részesíti előnyben, akkor a legjobb, ha figyelmét a Pancake típusú kefe nélküli egyenáramú motorokra fordítja.
- Szerelés: A legtöbb gyártó rendelkezik általános kapcsolási rajzzal az egyenáramú motorok egyenáramú motorjaihoz, ami lehetővé teszi a keretcégek számára, hogy elkerüljék az úgynevezett adapterek gyártását. A sablon általában metrikus, két lyuk 16 mm -re van egymástól, és további két lyuk 19 mm -re van egymástól (90 ° az elsőhöz képest).
- Menet: A kefe nélküli motornak a kerethez való rögzítéséhez használt szerelési menet eltérő lehet. A csavarok szokásos metrikus méretei az M1, M2 és M3, a birodalmi méretek 2-56 és 4-40 lehetnek.
2. Fő rotorok (propellerek)
A többrotoros UAV-k fő rotorjai (propellerek, rövidített támaszok) a rádióvezérelt repülőgépek propellereiből származnak. Sokan azt kérdezik: miért nem használnak helikopteres pengéket? Annak ellenére, hogy ez már megtörtént, képzelje el a helikopter pengéjű hexakopter méreteit. Érdemes megjegyezni azt is, hogy a helikopterrendszer megköveteli a lapátok dőlésszögének megváltoztatását, és ez jelentősen megnehezíti a tervezést.
Azt is megkérdezheti, hogy miért nem használ turboreaktoros motort, turbóventilátoros motort, turbócsavart stb.? Biztosan hihetetlenül jók a sok tolóerő biztosításában, de sok energiát is igényelnek. Ha a drón elsődleges célja, hogy nagyon gyorsan mozogjon, és ne zárt térben lebegjen, akkor a fenti motorok egyike jó választás lehet.
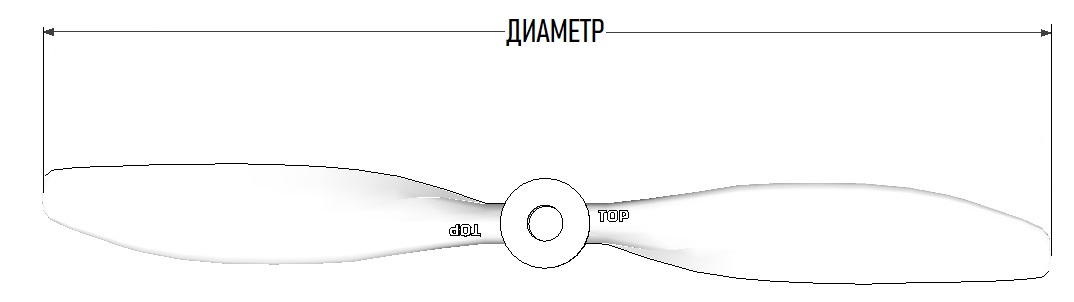
Pengék és átmérő
A legtöbb rotoros UAV fő rotorjának két vagy három lapátja van. A legelterjedtebb légcsavarok két pengével rendelkeznek. Ne feltételezze, hogy több kés hozzáadása automatikusan növeli a tolóerőt; minden lapát az előző lapát által megzavart áramlásban működik, csökkentve a légcsavar hatékonyságát. A kis átmérőjű fő rotornak kisebb a tehetetlensége, ezért könnyebb felgyorsítani és lassítani, ami fontos az akrobatikus repüléshez.

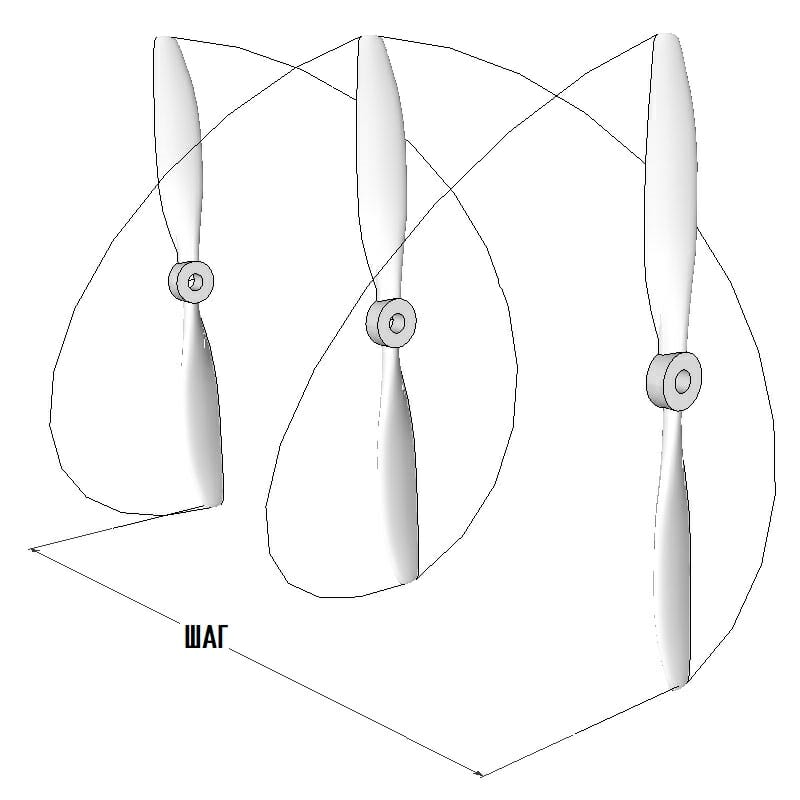
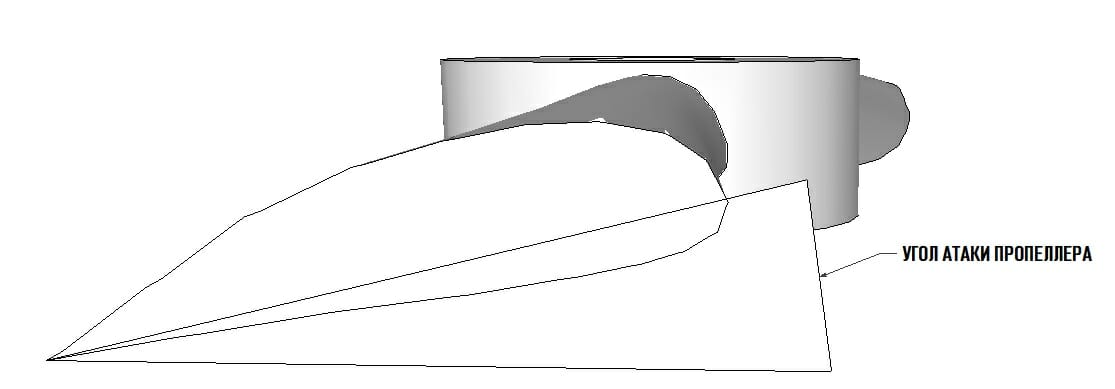
Pitch / Attack Angle / Efficiency / Thrust
A A fő rotor a levegő sűrűségétől, a légcsavar fordulatszámától, átmérőjétől, a lapátok alakjától és területétől, valamint a dőlésszögtől függ. A légcsavar hatékonysága a támadási szöggel függ össze, amelyet a penge dőlésszögének és a spirálszögnek (a kapott relatív sebesség és a lapát forgásiránya közötti szög) definiálunk. A hatékonyság maga a kimeneti teljesítmény és a bemeneti teljesítmény aránya. A legtöbb jól megtervezett légcsavar több mint 80% -os hatékonyságú. A támadási szöget a relatív sebesség befolyásolja, így a légcsavar különböző hatékonyságú lesz különböző motorfordulatszámoknál. A hatékonyságot erőteljesen befolyásolja a fő rotorlapát elülső éle is, és nagyon fontos, hogy a lehető legegyenletesebb legyen. Míg a változó menetemelkedésű konstrukció lenne a legjobb, a többrotoros rendszer egyszerűsége miatt szükséges bonyolultság azt jelenti, hogy szinte soha nem használnak változó menetemelkedésű légcsavart.
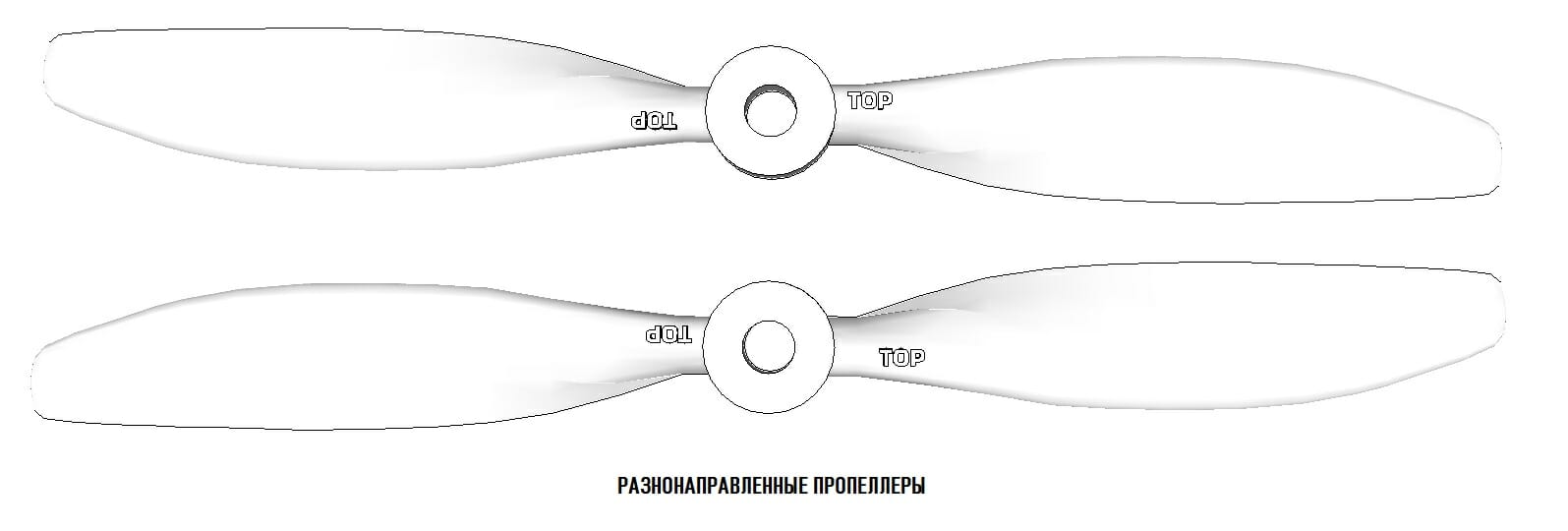
Forgatás
A rotorokat az óramutató járásával megegyező irányba (CW) vagy az óramutató járásával ellentétes irányba tervezték (CCW). A forgás irányát a penge dőlése jelzi ( a propeller végéről nézzen a propellerreVtailY6X8
Végrehajtási anyagok
A forgórészek (propellerek) gyártásához használt anyagok (anyagok) mérsékelt hatással lehetnek a repülésre a teljesítménynek, de a biztonságnak elsőbbséget kell élveznie, különösen, ha kezdő és tapasztalatlan.
- Műanyag (ABS / nylon, stb.) a legnépszerűbb választás, ha több hajtóműves UAV-ról van szó. Ez nagyrészt az alacsony költségeknek, a tisztességes repülési jellemzőknek és az exponenciális tartósságnak köszönhető. Jellemzően baleset esetén legalább egy légcsavar eltörik, és amíg elsajátítja a drónt, és megtanul repülni, mindig sok törött kelléke lesz. A műanyag csavar merevsége és ütésállósága javítható szénszállal (szénnel) történő megerősítéssel, ez a megközelítés max. hatékony és nem olyan drága a teljes értékű és szénszálas légcsavarhoz képest.
- Szálerősítésű polimer (szénszál, szén-erősítésű nejlon stb.) -a "fejlett" technológia sok kapcsolatban. A szénszálas alkatrészek gyártása még mindig nem könnyű, ezért többet kell fizetni értük, mint egy hasonló paraméterekkel rendelkező hagyományos műanyag csavarért. A szénszálas propellert nehezebb megtörni vagy meghajlítani, ezért ha lezuhan, akkor nagyobb kárt okoz mindenben, amellyel érintkezésbe kerül. Ugyanakkor a széncsavarok általában jól elkészítettek, merevebbek (minimális hatékonyságveszteséget biztosítanak), ritkán kell kiegyensúlyozni, és súlyuk kisebb, mint bármely más anyagé. Javasoljuk, hogy csak akkor vegye figyelembe az ilyen légcsavarokat, ha a felhasználó kényelmi szintje kényelmes lesz.
- A fa ritkán használt anyag a többrotoros UAV-rotorok gyártásához, mivel gyártásuk mechanikai megmunkálást igényel, ami később drágábbá teszi a fa propellereket, mint a műanyag. Ugyanakkor a fa elég erős és soha nem hajlik. Vegye figyelembe, hogy a fa propellereket továbbra is használják rádióvezérelt repülőgépekben.



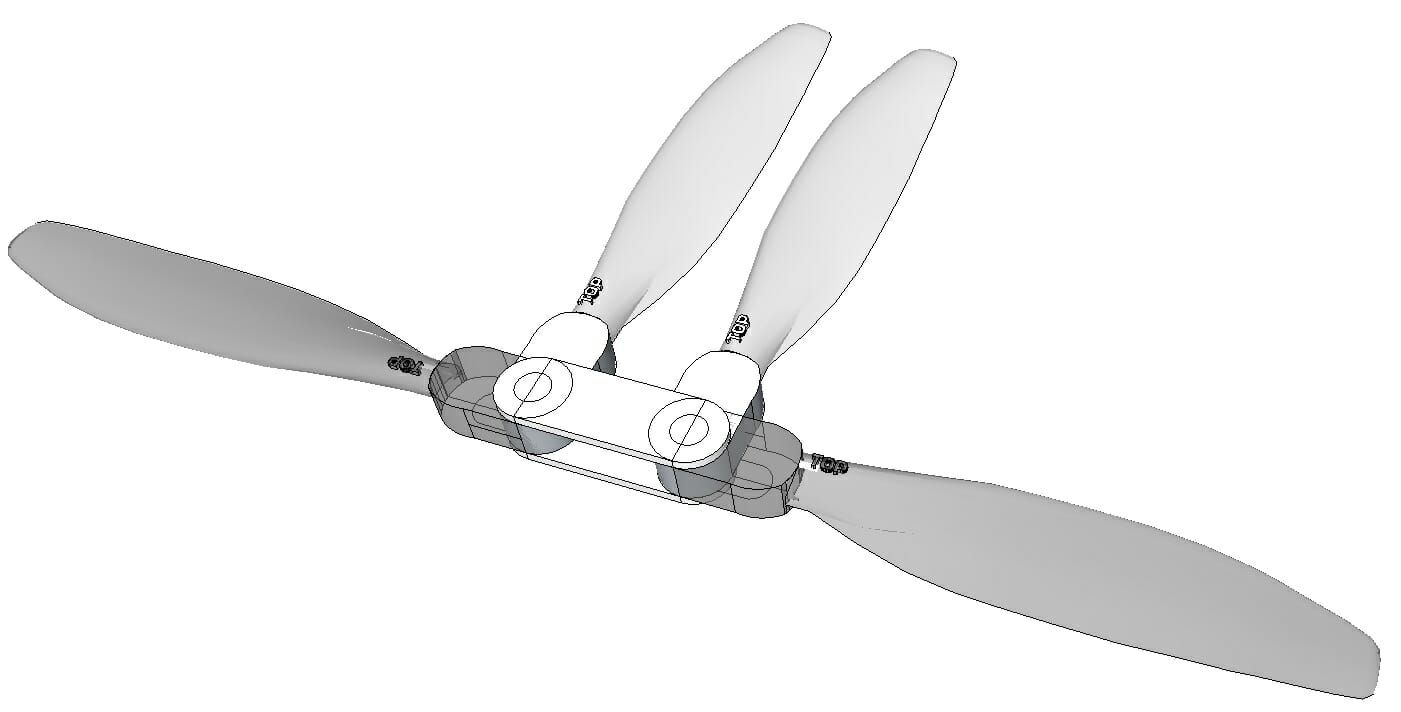
Összecsukható
Az összecsukható támaszok középpontja két forgólapáthoz kapcsolódik. Amikor a középpont (amely a motor kimenő tengelyéhez van csatlakoztatva) forog, centrifugális erők hatnak a lapátokra, kifelé tolva azokat, és lényegében "merevvé" teszik a légcsavart, ugyanazzal a hatással, mint egy klasszikus nem összecsukható légcsavar. Az alacsony kereslet és a szükséges alkatrészek nagy száma miatt az összecsukható légcsavarok kevésbé gyakoriak. Az összecsukható támaszok fő előnye a tömörség, és összecsukható kerettel kombinálva a drón szállítási méretei lényegesen kisebbek lehetnek, mint a repülési méretek. A hajtogató mechanizmus egyidejű előnye, hogy nincs szükség baleset esetén a légcsavar teljes cseréjére, elegendő csak a sérült lapát cseréje.
Telepítés
Az UAV -okhoz hasonlóan a forgórészek is széles méretválasztékkal rendelkezhetnek. Így az iparban számos „szabványos” motortengely -átmérő létezik. Ebben az összefüggésben a fő forgórészt gyakran szállítják egy kis adaptergyűrűvel (úgy néznek ki, mint alátétek, amelyek közepén különböző átmérőjű lyukak vannak), amelyeket a támasztóelem középső furatába
A csavar a motorhoz rögzíthető, aszerint, hogy a motor mely rögzítési módot támogatja. Ha a motortengely nem jelent semmilyen rögzítési lehetőséget (menetes csatlakozás, különféle rögzítőeszközök stb.), Akkor speciális adaptereket használnak, például támasztóelemeket és rögzítőbilincseket.
- Propsaver
- Befogótokmány
Kefe nélküli motorok külső rotorral ("Outrunner" típus), általában annak felső részében több menetes furatugyanolyan népszerű lehetőség a légcsavarnak a BC motor tengelyére történő rögzítésére. Az ilyen motor tengelyének menete van a végén, amelynek iránya ellentétes a forgórész forgási irányával. Ez a megközelítés kiküszöböli a rögzítő anya spontán meglazulását, biztosítva a drón biztonságos és megbízható működését.
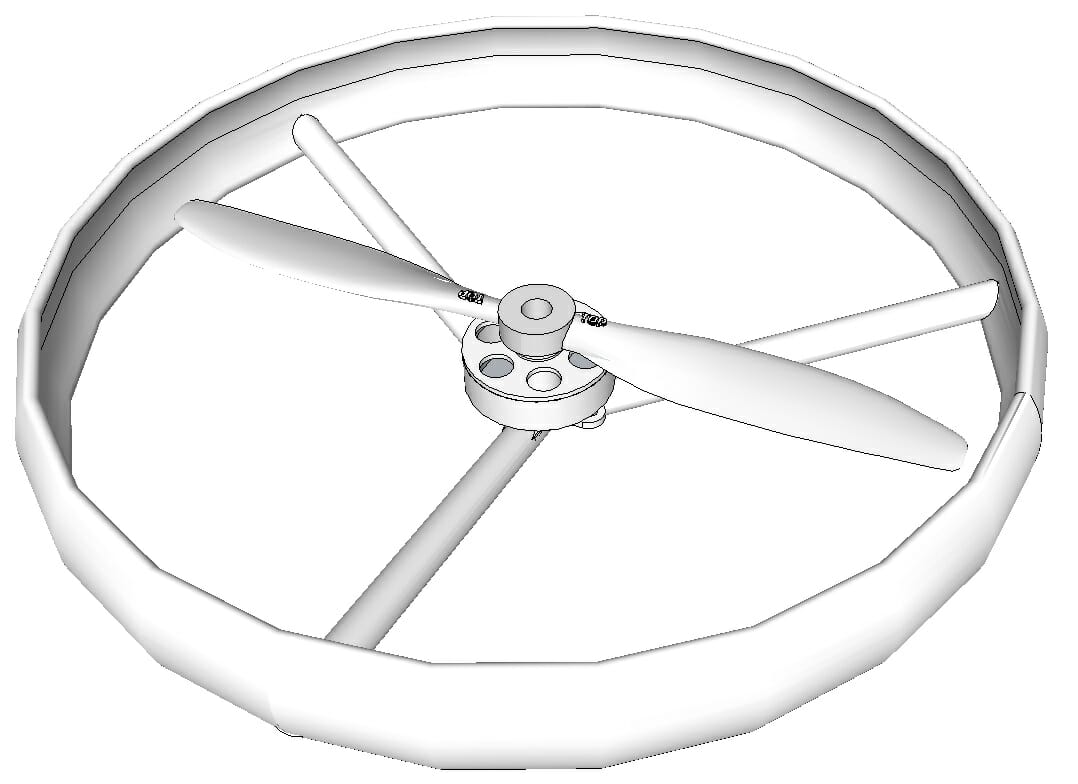
Rotorok védelme
Rotorok védelme - úgy tervezték, hogy kizárják az UAV erőmű közvetlen érintkezését egy szembejövő objektummal, ezáltal megőrizve annak épségét és teljesítményét, valamint a sérülések elkerülése érdekében o gyorsan forgó légcsavarok az emberek és állatok ütközése következtében. A légcsavarvédők a fő kerethez vannak rögzítve. A verziótól függően részben átfedheti az erőmű munkaterületét, vagy teljesen (gyűrűvédelem). A légcsavarvédelmet leggyakrabban kis (játék) UAV -ken használják. A védőelemek használata a szerelvényben számos kompromisszumot is hoz, többek között:
- Túlzott rezgést okozhat.
- Általában ellenáll a könnyű ütéseknek.
- Csökkentheti a tolóerőt, ha túl sok szerelőláb kerül a légcsavar alá.
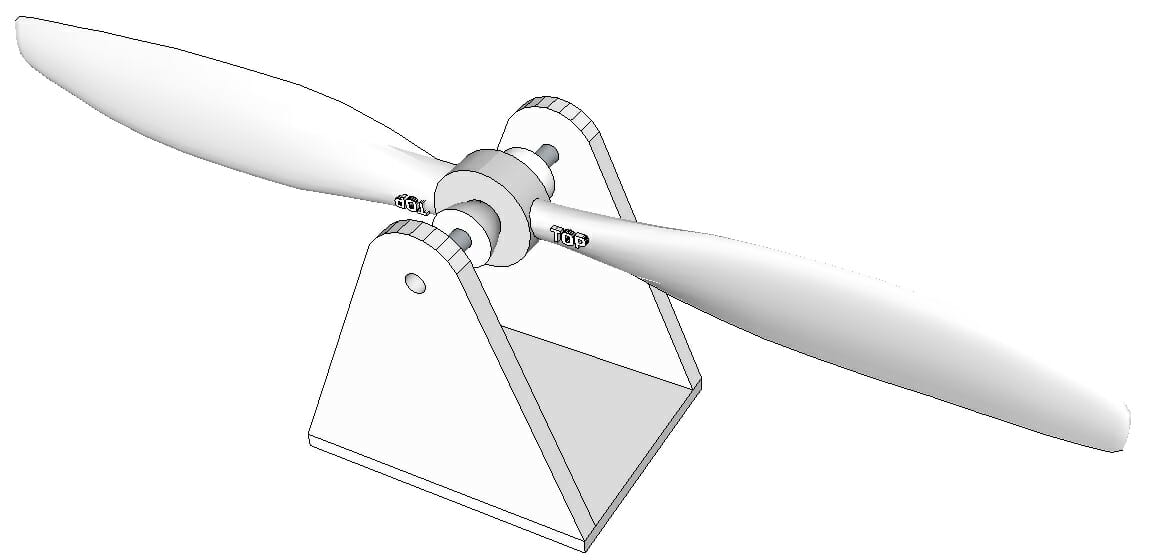
Kiegyensúlyozás
A legtöbb olcsó légcsavaron rossz egyensúly áll fenn. Ennek biztosításához nem kell messzire mennie, csak helyezzen be egy ceruzát a csavar középső furatába (általában egyensúlyhiány esetén az egyik oldal nehezebb lesz, mint a másik). Ezért erősen ajánlott egyensúlyozni a támaszait, mielőtt a motorokra telepíti őket. A kiegyensúlyozatlan légcsavar túlzott rezgést okoz, ami viszont negatívan befolyásolja a repülésirányító teljesítményét (ez a drón helytelen viselkedésében nyilvánul meg), nem beszélve a zaj növekedéséről, az erőmű elemeinek fokozott kopásáról és a minőség romlásáról. a felfüggesztett kamera.
A légcsavar különböző módon kiegyensúlyozható, de ha a semmiből épít drónt, akkor a szerszámkészletben olcsónak kell lennie légcsavar kiegyenlítő, amely lehetővé teszi, hogy egyszerűen és egyszerűen megállapítsa a légcsavar súlytalanságát. A súly kiegyenlítése érdekében vagy köszörülheti a támasz legnehezebb részét (egyenletesen köszörülje meg a penge középső részét, és semmiképpen ne vágja le a propellerrészt), egyensúlyozhat úgy is, hogy ragaszt egy darab (vékony) szalagot. a könnyebb penge (egyenletesen adja hozzá a szegmenseket, amíg el nem éri az egyensúlyt). Ne feledje, hogy minél távolabb történik a légcsavar egyensúlyozásától (csiszolás vagy szíj hozzáadása), annál nagyobb lesz a nyomaték elve alapján kifejtett hatás.
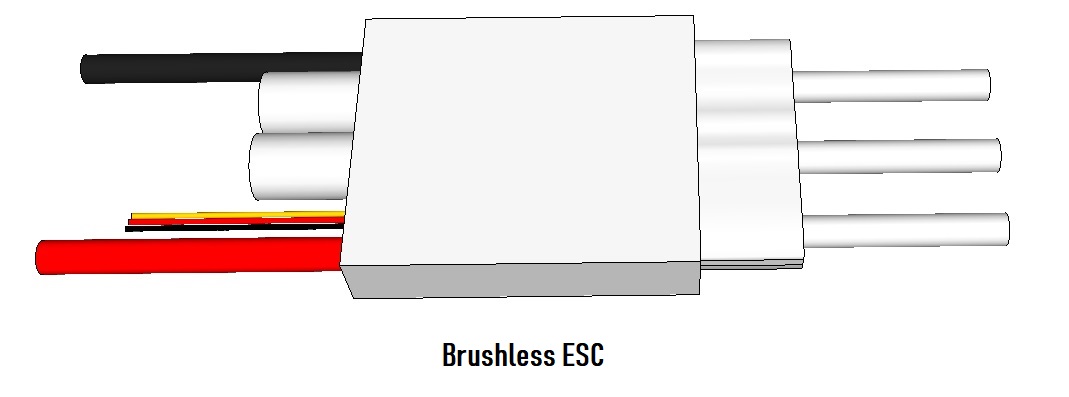
3. ESC
ESC (angol elektronikus sebességszabályozó; rus.elektronikus fordulatszám -szabályozó) - lehetővé teszi a repülésvezérlő számára, hogy szabályozza a motor sebességét és irányát. A megfelelő feszültség mellett az ESC -nek képesnek kell lennie elviselni a max. a motor által fogyasztható áramot, és korlátozza a fázison áthaladó áramot a kapcsolás során. A legtöbb drón hobby ESC csak a motor egy irányba történő forgatását teszi lehetővé, azonban a megfelelő firmware -rel mindkét irányban működhetnek.
Csatlakozás
Kezdetben az ESC zavaró lehet, mert több vezeték / csap / csatlakozó áll rendelkezésre a csatlakoztatáshoz. oldalak (az ESC forrasztott csatlakozókkal vagy anélkül).
- Tápegység: Két vastag (általában fekete és piros) vezetéket biztosítanak az áramellátáshoz az elosztó tábláról / kábelkötegről, amelyhez közvetlenül a repülőgép fő akkumulátorából származik az áram.
- 3 csatlakozó: Három csatlakozó áll rendelkezésre a vezérlő másik oldalán, hogy három golyócsatlakozóhoz (általában motorral szállítva) csatlakozzon egy kefe nélküli motoron. A csatlakozók használata az ESC csatlakoztatásakor lehetővé teszi, ha szükséges (meghibásodás esetén) a forrasztópáka használata nélküli gyors cserét. Előfordul, hogy a motorhoz tartozó golyó alakú csatlakozók nem egyeznek a szabályozó csatlakozóival, ebben az esetben egyszerűen cserélje ki őket megfelelő csatlakozókra. A három közül melyik a "plusz" és melyik a "mínusz"? A referenciapont egy egyszerű, pozitív vezeték az akkumulátorból, pozitív lesz az ESC -n, hasonlóan mínussal.
- 3 tűs R / C szervo csatlakozó vékony vezetékekkel: amelyen keresztül a vevőből érkező jel feldolgozásra kerül, ebből egy vezeték jel (a gázjel továbbítása az ESC-hez vagy bemenet), a második "mínusz" (vagy földelés) és egy pozitív vezeték (nem használható, ha nincs beépített BEC; beépített BEC-vel, ez egy 5 V-os kimenet, amely később tápellátásra használható fedélzeti elektronika).
BEC
A repülőgép -modellezés első napjaiban belső égésű motort használtak erőműként, a fedélzeti elektronikát pedig egy kis akkumulátor. Az elektromos vontató- és vezérlőelemek (ESC) megjelenésével az utóbbiakba kezdték beépíteni az úgynevezett akkumulátor-eltávolító áramkört-BEC (angolul. Battery Eliminator Circuit; vagy fedélzeti teljesítményátalakító; általában kiegészítő áramforrás 5 V feszültséggel 1A vagy annál nagyobb áramnál). Más szavakkal, ez egy feszültségátalakító, amelyet a szerelvényben LiPo használnak a drón fedélzeti elektronikájának áramellátására.
A multirotor összeszerelésekor minden ESC -t csatlakoztatni kell a repülésvezérlőhöz, de csak egy BEC szükséges, különben problémák merülhetnek fel ugyanazon vezetékek áramellátásakor. Mivel általában nincs mód a BEC letiltására az ESC -ken, a legjobb, ha eltávolítjuk a piros vezetéket (), és tekercseljük ragasztószalaggal az összes ESC kivételével. Az is fontos, hogy a fekete vezetéket (földet) hagyja a közös földnek.
Firmware
Nem minden piacon lévő ESC egyformán jó a többrotoros alkalmazásokhoz. Fontos megérteni, hogy a többmotoros UAV megjelenése előtt a kefe nélküli motorokat elsősorban rádióvezérelt autók, repülőgépek és helikopterek erőműveként használták. A legtöbb nem igényel gyors válaszidőt vagy frissítést. A beágyazott SimonK vagy BLHeli szoftverrel rendelkező ESC -k nagyon gyorsan tudnak reagálni a bejövő változásokra, ami általában különbséget tesz a stabil repülés vagy a baleset között.
Áramelosztás
Mivel minden ESC -t a fő akkumulátor táplál, a fő akkumulátor csatlakozóját valahogy négy ESC -re kell felosztani. Ez a áramelosztó táblaáramelosztó kábelkötegDeans
4. Akkumulátor
Kémia
Pilóta nélküli légi járművekben használt akkumulátorok jelenleg kizárólag lítium -polimer (LiPo), és néhányuk összetétele meglehetősen egzotikus - lítium -mangán vagy más lítium változatai. Az ólomsav egyszerűen nem megfelelő, és a NiMh / NiCd még mindig túl nehéz a kapacitásukhoz, és gyakran nem tudják biztosítani a szükséges magas kibocsátási sebességet. A LiPo nagy teljesítményt és kisülési sebességet kínál alacsony súly mellett. A hátrányok viszonylag magas költségek és állandó biztonsági problémák (tűzveszély).
Feszültség
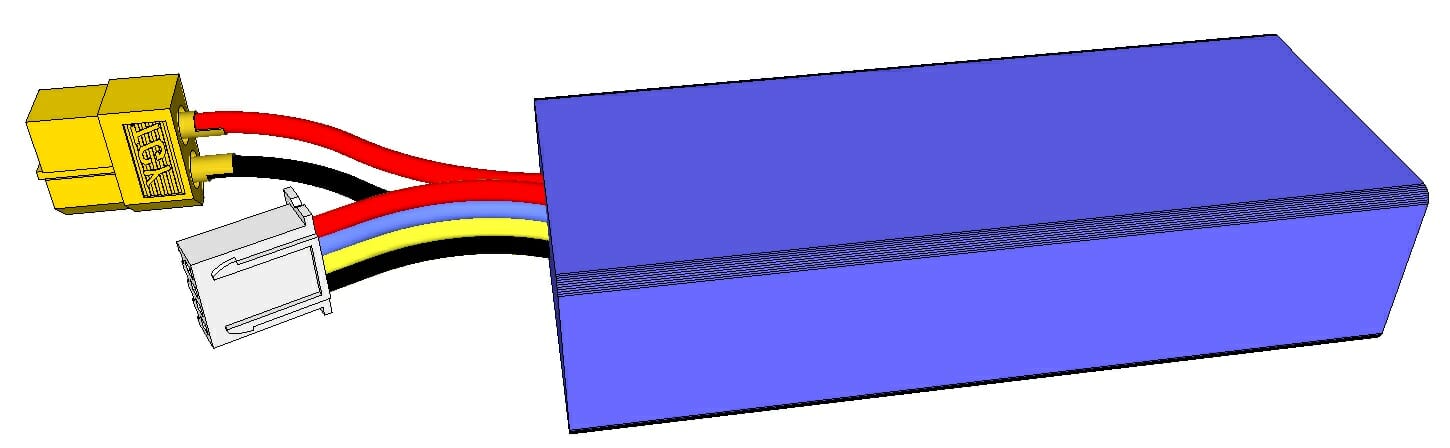
A gyakorlatban csak egy akkumulátorra van szüksége az UAV -hez. Ennek az akkumulátornak a feszültségének meg kell egyeznie a kiválasztott BK motorokkal. Szinte minden ma használt akkumulátor lítium-alapú, és több, egyenként 3,7 V-os cellát (kannát) tartalmaz, ahol 3,7 V = 1S (azaz egydobozos akkumulátor; a 2S kétdobozos stb.). Ezért a 4S feliratú akkumulátor névleges értéke valószínűleg 4 × 3,7 V = 14,8 V. Ezenkívül a dobozok száma segít meghatározni, hogy melyik töltőt használja. Vegye figyelembe, hogy a nagy kapacitású egycellás akkumulátor fizikailag úgy néz ki, mint egy alacsony kapacitású többcellás akkumulátor.
Kapacitás
Az akkumulátor kapacitását amperórában (Ah) mérik. A kis akkumulátorok kapacitása 0,1 Ah (100 mAh), közepes méretű drónok akkumulátor kapacitása 2-3 Ah (2000 mAh-3000 mAh) között változhat. Minél nagyobb a kapacitás, annál hosszabb a repülési idő, és ennek megfelelően az akkumulátor is nehezebb. A hagyományos UAV repülési ideje 10-20 perc tartományban lehet, ami rövid életűnek tűnhet, de meg kell értenie, hogy a drón folyamatosan küzd a gravitációval a repülés során, és a repülőgéppel ellentétben nincsenek felületei (szárnyak), amelyek optimális emelőerő formájában nyújtanak segítséget.
Kisülési ráta
A lítium akkumulátor lemerülési sebességét „C” -ben mérik, ahol 1C az akkumulátor kapacitása (általában amperórában, hacsak nem akkora drónt veszünk figyelembe, mint Tenyér). A legtöbb LiPo akkumulátor kisütési sebessége legalább 5C (a kapacitás ötszöröse), de mivel a többrotoros UAV-okban használt motorok nagy része sok áramot fogyaszt, az akkumulátornak hihetetlenül nagy árammal kell lemerülnie, ami általában körülbelül 30A vagy több.
Biztonság
A LiPo akkumulátorok nem teljesen biztonságosak, mivel nyomás alatt álló hidrogéngázt tartalmaznak, és hajlamosak égni és / vagy felrobbanni bármi baj van. Így ha kétségei vannak az akkumulátor egészségével kapcsolatban, semmi esetre se csatlakoztassa azt a drónhoz vagy akár a töltőhöz - tekintse „leszereltnek”, és helyezze el megfelelően. Az árulkodó jelek, hogy valami nincs rendben az akkumulátorral, horpadások vagy duzzanatok (azaz gázszivárgás). LiPo akkumulátor töltésekor a legjobb, ha biztonságos LiPo dobozt (Akkumulátor biztonságos doboz) használ. Az akkumulátorok tárolása

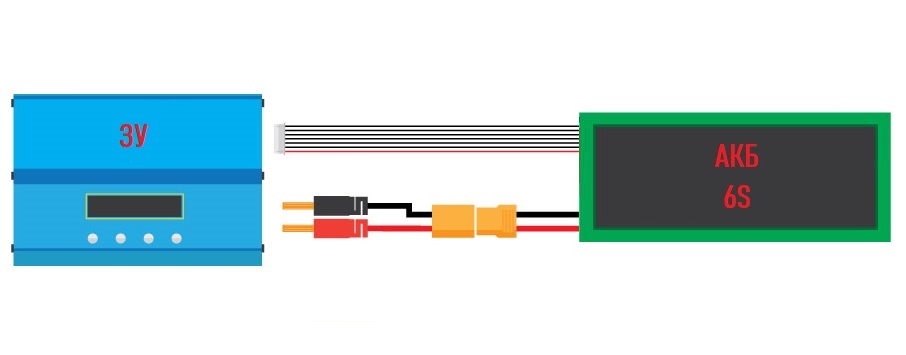
Töltés
A legtöbb LiPo akkumulátornak két csatlakozója vanA töltőneka lítium -polimer akkumulátorokkal kapcsolatos biztonsági aggályokat
.Szerelés
Az akkumulátor a drón legnehezebb eleme, ezért a középső holtpontra kell felszerelni annak biztosítása érdekében a motorok terhelése azonos. Az akkumulátor nem igényel speciális rögzítést (különösen az önmetsző csavarokat, amelyek károsíthatják a LiPo-t és tüzet okozhatnak), ezért a ma használt rögzítési módok közé tartoznak a tépőzáras hevederek, a gumi, a műanyag rekeszek és mások. A legelterjedtebb akkumulátor -rögzítési lehetőség az, hogy az akkumulátort tépőzáras hevederrel a keret alá akasztja.







