Mi az a quadcopter?
A quadrocopter egyfajta multikopter. A multikopter többmotoros vagy többrotoros repülőgép (helikopter), amelynek fő rotorja átlósan forog ellentétes irányban. A multikopterek a motorok számától (vagy a forgórészek számától) függően különböznek egymástól. Manapság három vagy több rotoros multikoptereket használnak.
A leggyakoribb sémák a következők: 4/6/8 rotorok. A három rotoros légcsavaros berendezést tricopternek nevezik; négy - quadcopter; hat - hexakopterrel és nyolc rotorral - egy oktopterrel. Mindegyik séma használata főként egy olyan paramétert határoz meg, mint - a hasznos terhelés tömege, vagy egyszerűbben, a tömeg, amelyet a multikopter fel tud venni.
Példák a modern többrotoros megoldásokra.
Modern többrotoros megoldások különböző árrésekből:




A történelemből
Minden 1922-ben kezdődött, az orosz-amerikai repülőgép-tervező, Georgy Aleksandrovich Botezat társaságában. Aki feltalálta az első ilyen típusú működő quadcoptert. Készüléke nemcsak a földről tudott leszállni, hanem egy ideig a levegőben is tartani. Abban az időben az ilyen eszközöknek volt egy jelentős hátrányuk - a működés elve.

A négy rotor közül csak az egyik volt a vezető (a forgást a belső égésű motor állította be), azaz A nyomatékot egy összetett sebességváltón keresztül az egyik motor továbbította a másik 3 fő rotorhoz. Nem jött a sorozatfejlesztés. És az olyan találmányok, mint a "Tail rotor" és a "Swashplate", kénytelenek voltak teljesen elhagyni a többrotoros repülőgépek fejlesztését, később létrehozták a világ első helikopterét.
A 21. század eljövetelével a multikopterek pilóta nélküli légi járművek vagy drónok formájában kerültek életünkbe.
A multikopterek fő alkotóelemei
Technikailag körülbelül 5 évvel ezelőtt a multikopterek (drónok) három fő összetevője jelent meg:
- Akkumulátor - lítium-polimer (LiPo), ritkábban lítium-ion (Li-Ion).
- Kefe nélküli vagy szálcsiszolt ritkaföldfém motorok.
- Távirányító (Vezérlőpult / Hardver / adó)

Működési elv
A modern multikopter működési elve egyszerű. Az alkalmazási sémától függően (3/4/6/8 rotor) minden rotort elektromos motor (villanymotor) hajt. A motorok egyik fele forgatja a csavarokat az óramutató járásával megegyező irányba, a másik fele pedig az óramutató járásával ellentétes irányba. Ennek a megközelítésnek köszönhetően a multikopter vezérléséhez nincs szükség farokrotorra és komplex takarólapra a drón tervezésekor.
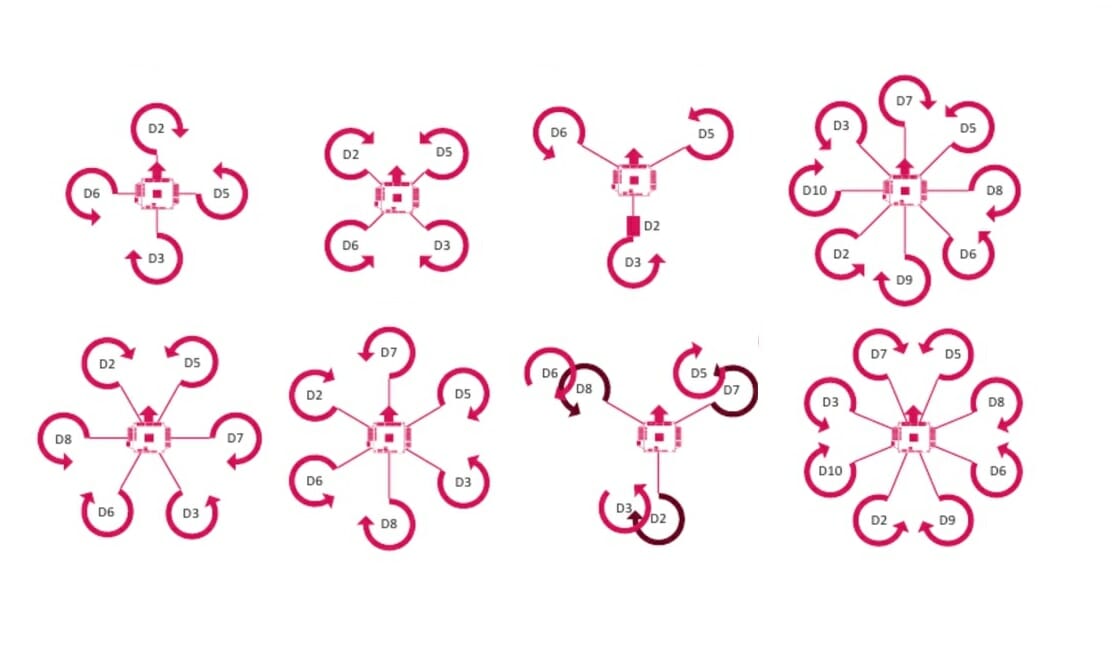
* A multikopter rotor forgásirányának sorrendje.
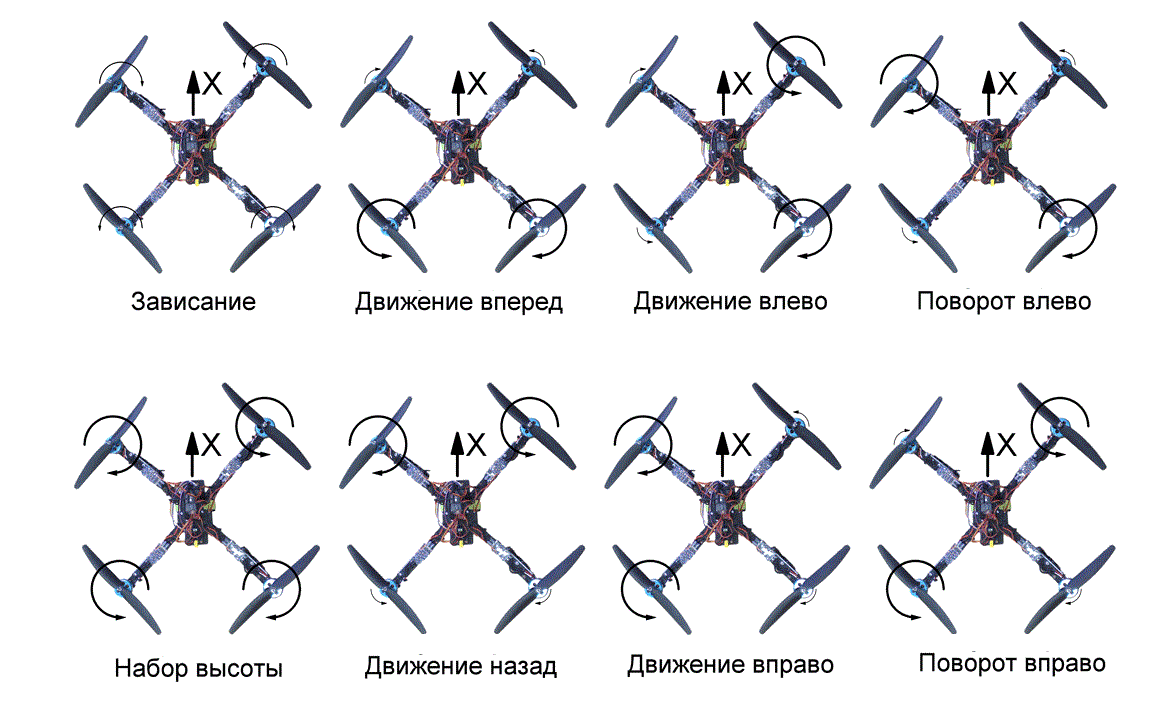
Példa a repülésirányításra:
- Növekvő fordulatszám minden forgórészen - emelés.
- Csökken a sebesség minden rotoron - csökken.
- Ha növeli a csavarok egyik felének fordulatszámát, és csökkenti a másik felének fordulatszámát, akkor a mozgás oldalra áll.
- Az óramutató járásával megegyező irányú propellerek fordulatszámának növelése és az óramutató járásával ellentétes irányú propellerek fordulatszámának csökkentése forgatni fogja a drónt.
* Repülésvezérlő séma a forgórészek forgásához.
Motorok
A modern multikoptereken (drónok) jelenleg kétféle villanymotort használnak - szálcsiszolt és kefe nélküli. Az ecset nélküli drónokat főleg drága és professzionális drónokkal látják el. Csak a költségvetési lehetőségek és játékok vannak felszerelve kollektor motorokkal. Különbségeikről további részletek itt találhatók

Vezérlés
A multikoptert távvezérlő (más néven távirányító, berendezés, adó ) vezérli kimenő rádióhullámok segítségével (általában 2,4 GHz vagy 5,8 GHz ) frekvencián.
Annak érdekében, hogy a multikopter válaszoljon a központ kéréseire, a drón elektronikus rendszerek egész komplexumával van felszerelve:
- Mikroprocesszor ( repülésvezérlő
- Giroszkóp - felelős a drón stabil viselkedéséért repülés közben (általában 6 irányú tengely mentén biztosítja a stabilizációt).
- Gyorsulásmérő - Ez az érzékelő lehetővé teszi a processzor számára, hogy a repülőgépet vízszintes helyzetbe hozza a talajhoz képest.
- Barometrikus érzékelő (barométer) - biztosítja a drón stabil lebegését a pilóta által kiválasztott magasságban.
- Szonár (ultrahangos érzékelő) - automatikus leszállást és kis magasság (1,5 - 3,5 méter) tartását biztosítja, akadályok körül is repülhet.
- GPS modul - biztosítja a drón földrajzi helymeghatározását a műholdas rendszerekből kapott adatok felhasználásával. Jelenléte miatt megvalósul a pontok szerinti repülés funkciója, amely kommunikáció megszakadása vagy alacsony akkumulátor-töltés esetén visszatér a felszállóhelyre, és lehetővé teszi a repülési leolvasást mind a repülés idején, mind azt követően.
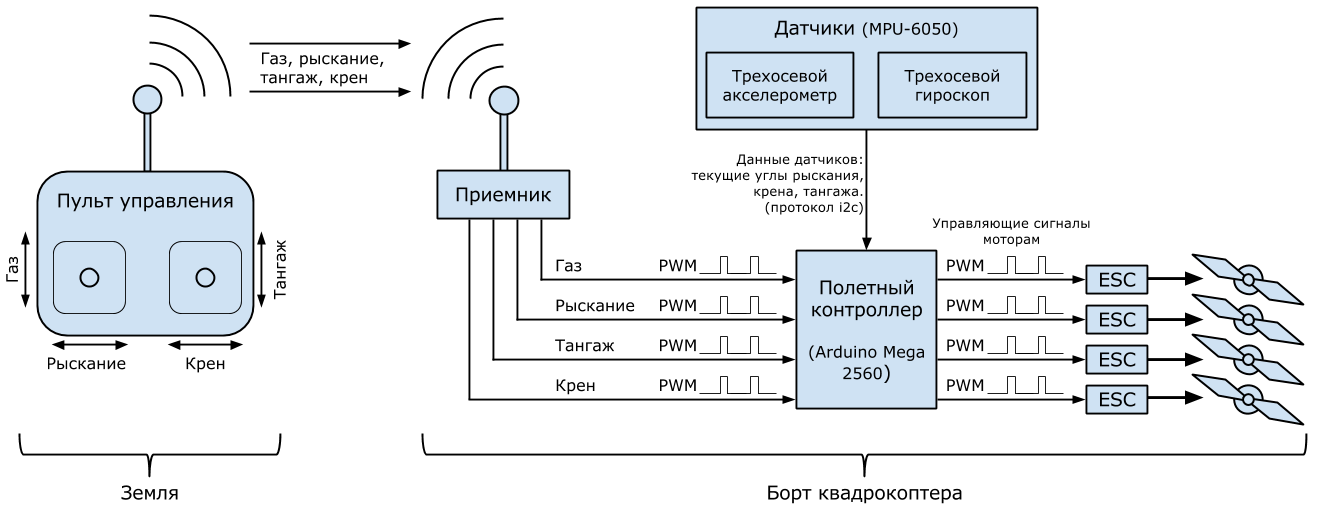
* A quadrocopter eszköz legegyszerűbb sémája.
Mik ezek?
Jelenleg a fogyasztói drónpiac hatalmas számú multikoptert (drónt) kínál, de általában három nagy csoportra oszthatók: kezdőknek / amatőröknek / Szakmai
Kezdőknek - gyermekeknek és felnőtteknek egyaránt alkalmas első ismerkedés és tanulás céljából. Általában mikroprocesszorral, 6 tengelyes giroszkóppal és egyszerű barometrikus érzékelővel vannak felszerelve, hogy biztosítsák a magasságot.
Amatőr - olyan pilótáknak, akik már rendelkeznek tapasztalattal az UAV -kban. Alkalmasabb egy adott alkalmazáshoz. Például légi fényképezéshez vagy olyan sportokhoz, mint a drone racing. Az ebbe a csoportba tartozó drónok önálló repülési és felmérési funkciókkal rendelkezhetnek.
Professzionális - Kizárólag tapasztalt pilóták számára alkalmas, akik professzionális területen használják a multikopterek (drónok) képességeit. Például professzionális fotó- és videofelvétel, geodézia, szárazföldi megfigyelés, forgalom, mentési műveletek stb. A legtöbb esetben a drónok önálló repülési és felmérési funkciókkal rendelkeznek. Az elektronikus töltőanyag nagy pontosságú, modern rendszerekből áll össze, amelyek hosszú távú eltávolítást tesznek lehetővé, és a tápegység lehetővé teszi, hogy sokkal több időt töltsön repülés közben. Az ilyen multikopterek közötti jellemző különbség az áruk.
A pilóta nélküli rendszerek teljesebb megismeréséhez ajánljuk a "Mi a drón?" Témát.
.






