Isi
- drone DIY: Pelajaran 1. Terminologi.
- Drone buatan sendiri: Pelajaran 2. Bingkai.
- Drone buatan sendiri: Pelajaran 3. Pembangkit listrik.
- Drone buatan sendiri: Pelajaran 4. Pengontrol penerbangan.
- Do-it-yourself drone: Pelajaran 5. Perakitan.
- Drone buatan sendiri: Pelajaran 6. Pemeriksaan kinerja.
- Do-it-yourself drone: Pelajaran 7. FPV dan jarak.
- Drone dengan tanganmu sendiri: Pelajaran 8. Pesawat terbang.
Pendahuluan
Sekarang setelah Anda memilih atau membuat bingkai, langkah selanjutnya adalah memilih powertrain yang benar. Karena sebagian besar drone yang ada adalah listrik, kami akan fokus untuk menghasilkan penggerak listrik murni melalui motor DC brushless. Pembangkit listrik meliputi motor, rotor (baling-baling, disingkat props), ESC dan baterai penyimpanan.
1. Motor
Dari motor apa yang Anda gunakan dalam perakitan Anda, itu akan tergantung pada beban maksimum yang dapat diangkat oleh drone, serta berapa lama ia dapat terbang. Pembangkit listrik harus terdiri dari motor dengan merek dan model yang sama, pendekatan ini akan memberikan operasi yang seimbang. Perlu dicatat bahwa bahkan motor (Merek / Model) yang benar-benar identik dapat memiliki sedikit perbedaan dalam kecepatan, yang kemudian diratakan oleh pengontrol penerbangan.
Brushed vs Brushless
Pada motor Brushed, rotor belitan berputar di dalam stator tempat magnet dipasang secara kaku. Di motor brushless, semuanya berputar; belitan dipasang dengan kaku ke bagian dalam stator, dan magnet dipasang pada poros dan berputar. Dalam kebanyakan kasus, Anda hanya akan mempertimbangkan motor DC brushless (BC). Motor jenis ini banyak digunakan dalam industri radio amatir untuk merakit produk mulai dari helikopter dan pesawat terbang hingga sistem penggerak di mobil dan kapal.
Motor brushless pancake berdiameter lebih besar, lebih rata dan umumnya memiliki torsi tinggi dan KV lebih rendah (detail di bawah). UAV berukuran kecil (biasanya seukuran telapak tangan) sering menggunakan motor brushed kecil karena biayanya yang lebih rendah dan pengontrol dua kabel yang sederhana. Sementara motor brushless datang dalam berbagai ukuran dan spesifikasi, memilih ukuran yang lebih kecil tidak berarti akan lebih murah.

Inrunner vs Outrunner
Ada beberapa jenis motor DC brushless:
- Inrunner adalah rotor bagian dalam. Gulungan dipasang pada stator, magnet dipasang pada poros rotor, yang berputar (biasanya digunakan pada kapal RC, helikopter, dan mobil karena KV tinggi).
- Lebih cepat - rotor luar. Magnet dipasang pada stator yang berputar di sekitar belitan stasioner. Bagian bawah motor diperbaiki.(biasanya, motor jenis ini memiliki lebih banyak torsi).
- Hybrid Outrunner secara teknis adalah "Outrunner" tetapi diimplementasikan dalam paket "Inrunner". Pendekatan ini memungkinkan untuk menggabungkan dalam satu tipe torsi "Outrunner" dan tidak adanya elemen rotasi eksternal seperti pada motor tipe "Inrunner".
KV
Peringkat KV - maks. jumlah putaran yang dapat dikembangkan motor tanpa kehilangan daya pada tegangan tertentu. Untuk sebagian besar UAV multi-rotor, nilai KV rendah (misalnya, dari 500 hingga 1000) relevan, karena ini membantu memastikan stabilitas. Sedangkan untuk penerbangan akrobatik, nilai KV antara 1000 dan 1500 akan relevan, seiring dengan diameter rotor (baling-baling) yang lebih kecil. Misalkan saja nilai KV untuk motor tertentu adalah 650 rpm, maka pada tegangan 11.1V motor akan berputar dengan kecepatan: 11.1×650 = 7215 rpm, dan jika menggunakan motor pada tegangan yang lebih rendah (misalkan 7.4V), maka kecepatan putarannya adalah: 7,4 × 650 = 4810 rpm. Penting untuk dicatat, bagaimanapun, bahwa menggunakan tegangan rendah umumnya berarti konsumsi arus yang lebih tinggi (Daya = Arus × Tegangan).
Thrust
Beberapa produsen motor brushless dapat menentukan dalam spesifikasi informasi tentang kemungkinan dorong (Thrust) maksimum yang dihasilkan oleh motor dalam hubungannya dengan rotor utama yang direkomendasikan. Satuan ukuran untuk gaya dorong biasanya kilogram (Kg/Kg), pound (Lbs) atau Newton (N). Misalnya, jika Anda sedang membangun quadrocopter dan Anda mengetahui nilai dorong motor tunggal = hingga 0,5kg dalam kompartemen dengan rotor 11 inci, maka pada keluaran empat motor tersebut dapat diangkat dengan daya dorong maksimum: 0,5kg × 4 = 2kg. Dengan demikian, jika berat total quadcopter Anda sedikit kurang dari 2kg, maka dengan pembangkit listrik seperti itu, ia hanya akan lepas landas pada rpm maksimum (dorongan maksimum). Dalam hal ini, akan relevan untuk memilih bundel motor rotor yang lebih kuat, yang akan memberikan lebih banyak daya dorong, atau untuk mengurangi berat total drone. Maks. daya dorong pembangkit listrik = 2kg, berat drone tidak boleh lebih dari setengah dari nilai ini (1kg, termasuk berat motor itu sendiri). Perhitungan serupa dapat dilakukan untuk konfigurasi apa pun. Misalkan berat hexacopter (termasuk rangka, motor, elektronik, aksesori, dll.) adalah 2,5kg. Ini berarti bahwa setiap mesin untuk rakitan seperti itu harus menyediakan (2,5kg 6 motor) × 2 = dorong 0,83kg (atau lebih). Sekarang Anda tahu cara menghitung daya dorong optimal motor berdasarkan berat total, tetapi sebelum membuat keputusan, kami sarankan Anda membiasakan diri dengan bagian di bawah ini.
Pertimbangan tambahan
- Konektor: Motor DC brushed memiliki dua konektor "" dan "-". Mengubah kabel di tempat mengubah arah putaran motor.
- Konektor: Motor DC brushless memiliki tiga konektor. Untuk mengetahui cara menghubungkannya, serta cara mengubah arah putaran, lihat bagian ESC di bawah ini.
- Gulungan: Gulungan mempengaruhi KV motor. Jika Anda membutuhkan nilai KV terendah tetapi mengutamakan torsi, yang terbaik adalah mengalihkan perhatian Anda ke motor DC brushless tipe Pancake.
- Pemasangan: Sebagian besar pabrikan memiliki diagram pengkabelan umum untuk motor DC untuk motor DC, yang memungkinkan perusahaan rangka menghindari pembuatan apa yang disebut adaptor. Templat biasanya metrik, dengan dua lubang terpisah 16mm, dan dua lubang lagi terpisah 19mm (90 ° ke yang pertama).
- Benang: Benang pemasangan yang digunakan untuk memasang motor tanpa sikat ke rangka dapat bervariasi. Ukuran metrik sekrup yang biasa adalah M1, M2 dan M3, ukuran imperial bisa 2-56 dan 4-40.
2. Rotor utama (Propeller)
Rotor utama (baling-baling, disingkat props) untuk UAV multi-rotor berasal dari baling-baling pesawat yang dikendalikan radio. Banyak yang akan bertanya: mengapa tidak menggunakan baling-baling helikopter? Meskipun ini sudah dilakukan, bayangkan dimensi hexacopter dengan baling-baling helikopter. Perlu juga dicatat bahwa sistem helikopter memerlukan perubahan nada bilah, dan ini secara signifikan memperumit desain.
Anda mungkin juga bertanya mengapa tidak menggunakan mesin turbojet, mesin turbofan, mesin turboprop, dll.? Tentunya mereka sangat bagus dalam memberikan banyak dorongan, tetapi mereka juga membutuhkan banyak energi. Jika perhatian utama drone adalah bergerak sangat cepat daripada melayang di ruang terbatas, salah satu motor di atas mungkin merupakan pilihan yang baik.
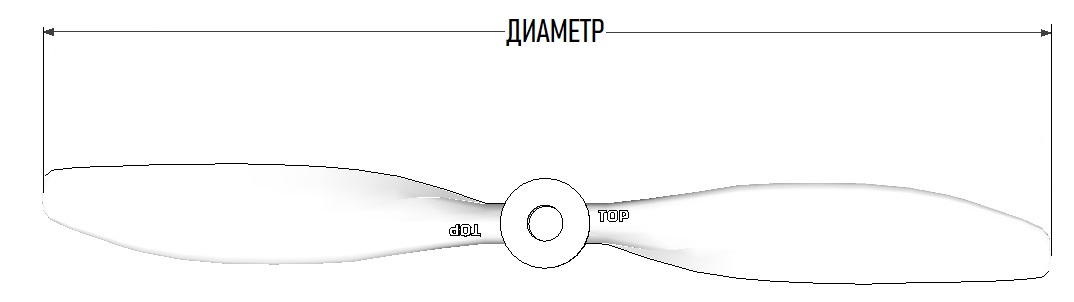
Bilah dan diameter
Rotor utama dari sebagian besar UAV multi-rotor memiliki dua atau tiga bilah. Baling-baling yang paling banyak digunakan adalah dengan dua bilah. Jangan berasumsi bahwa menambahkan lebih banyak bilah akan secara otomatis meningkatkan daya dorong; setiap sudu bekerja pada aliran yang terganggu oleh sudu sebelumnya, sehingga mengurangi efisiensi baling-baling. Rotor utama berdiameter kecil memiliki kelembaman yang lebih kecil dan oleh karena itu lebih mudah untuk dipercepat dan diperlambat, yang penting untuk penerbangan akrobatik.

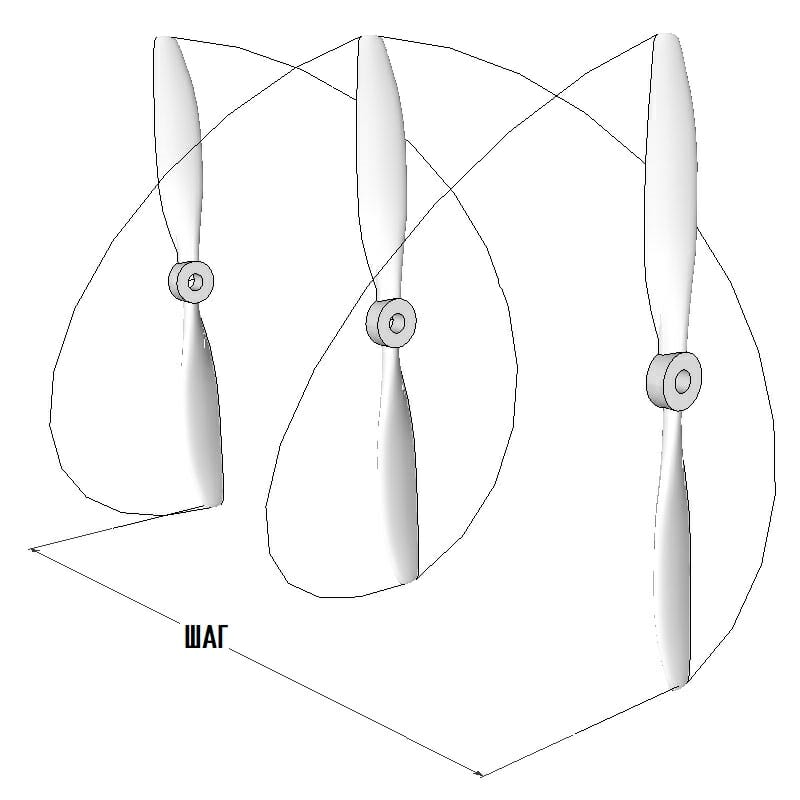
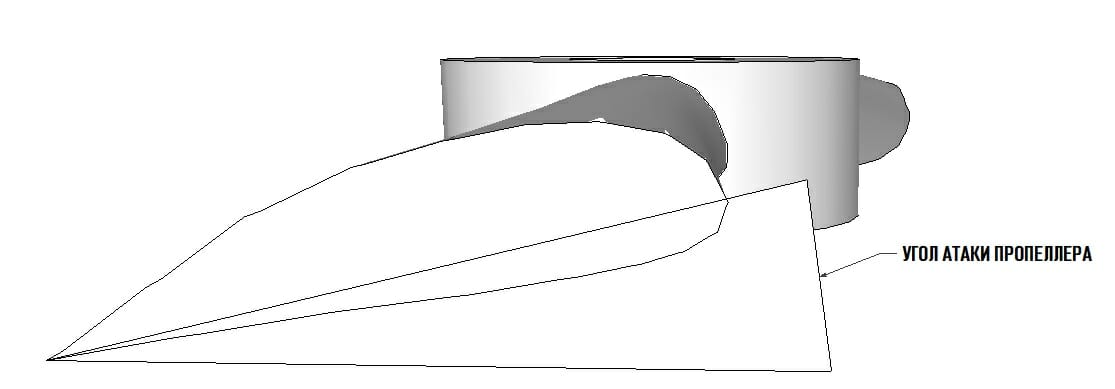
Pitch / Sudut Serangan / Efisiensi / Dorongan
Daya dorong yang dihasilkan oleh rotor utama tergantung pada kerapatan udara, jumlah putaran baling-baling, diameternya, bentuk dan luas bilah, serta nadanya. Efisiensi baling-baling terkait dengan sudut serang, yang didefinisikan sebagai pitch sudu dikurangi sudut heliks (sudut antara kecepatan relatif yang dihasilkan dan arah putaran sudu). Efisiensi itu sendiri adalah perbandingan antara daya keluaran dengan daya masukan. Kebanyakan baling-baling yang dirancang dengan baik lebih dari 80% efisien. Sudut serang dipengaruhi oleh kecepatan relatif, sehingga baling-baling akan memiliki efisiensi yang berbeda pada kecepatan motor yang berbeda. Efisiensi juga sangat dipengaruhi oleh tepi depan bilah rotor utama, dan sangat penting untuk membuatnya sehalus mungkin. Sementara desain pitch variabel akan menjadi yang terbaik, kompleksitas tambahan yang diperlukan atas kesederhanaan yang melekat pada multi-rotor berarti bahwa baling-baling pitch variabel hampir tidak pernah digunakan.
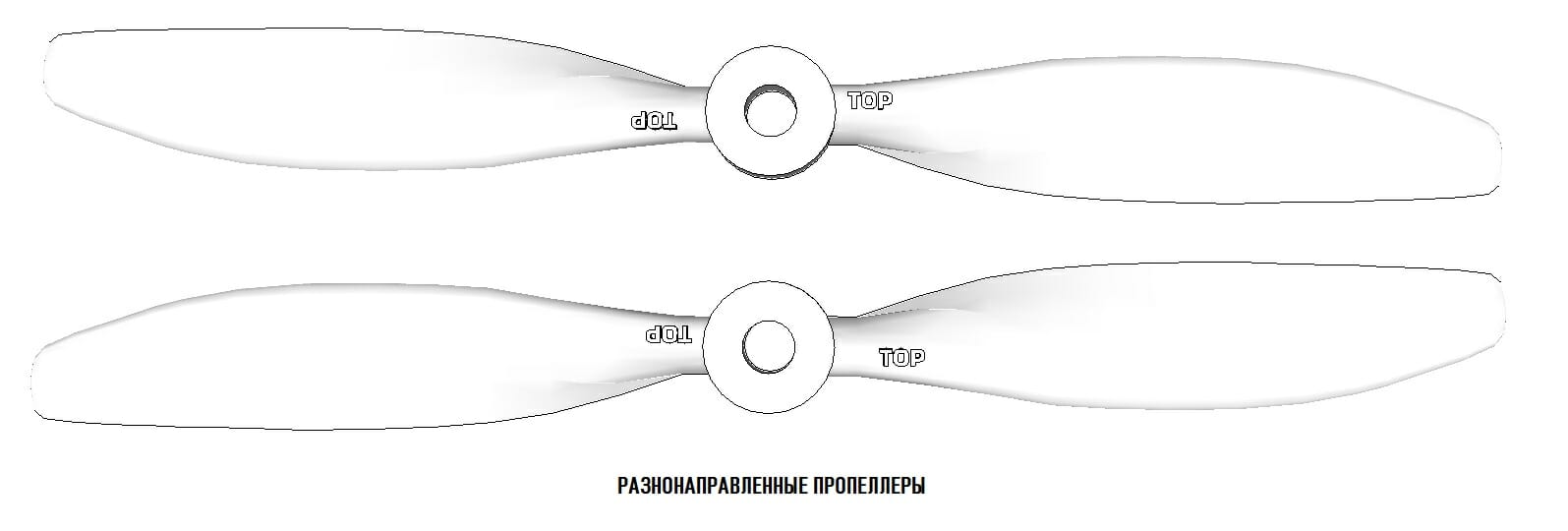
Rotasi
Rotor dirancang untuk rotasi searah jarum jam (CW), atau berlawanan arah jarum jam (CCW). Arah putaran ditunjukkan oleh kemiringan sudu ( melihat baling-baling dari ujung pantatVtailY6X8
Bahan eksekusi
Bahan yang digunakan untuk pembuatan rotor (baling-baling) mungkin memiliki efek sedang pada penerbangan kinerja tetapi keselamatan harus menjadi prioritas utama, terutama jika Anda seorang pemula dan tidak berpengalaman.
- Plastik (ABS / Nylon, dll.) adalah pilihan paling populer untuk UAV multi-mesin. Ini sebagian besar disebabkan oleh biaya rendah, karakteristik penerbangan yang layak, dan daya tahan eksponensial. Biasanya, jika terjadi kecelakaan, setidaknya satu baling-baling rusak, dan saat Anda menguasai drone dan belajar terbang, Anda akan selalu memiliki banyak alat peraga yang rusak. Kekakuan dan ketahanan benturan dari sekrup plastik dapat ditingkatkan dengan memperkuat dengan serat karbon (karbon), pendekatan ini maks. efektif dan tidak begitu mahal dibandingkan dengan baling-baling yang lengkap dan serat karbon.
- Polimer yang diperkuat serat (serat karbon, nilon yang diperkuat karbon, dll.) - adalah teknologi "canggih" dalam banyak hubungan. Bagian serat karbon masih tidak mudah dibuat, dan oleh karena itu Anda membayar lebih untuk itu daripada untuk sekrup plastik biasa dengan parameter serupa. Baling-baling yang terbuat dari serat karbon lebih sulit dipatahkan atau ditekuk, dan oleh karena itu, jika jatuh, akan lebih merusak apa pun yang bersentuhan dengannya. Pada saat yang sama, baling-baling karbon umumnya dibuat dengan baik, lebih kaku (memberikan kerugian minimal dalam efisiensi), jarang membutuhkan penyeimbang, dan lebih ringan daripada bahan lainnya. Disarankan untuk mempertimbangkan baling-baling seperti itu hanya setelah tingkat piloting pengguna menjadi nyaman.
- Kayu adalah bahan yang jarang digunakan untuk produksi rotor UAV multi-rotor, karena pembuatannya memerlukan pemrosesan mekanis, yang nantinya membuat baling-baling kayu lebih mahal daripada baling-baling plastik. Pada saat yang sama, pohon itu cukup kuat dan tidak pernah bengkok. Perhatikan bahwa baling-baling kayu masih digunakan di pesawat yang dikendalikan radio.



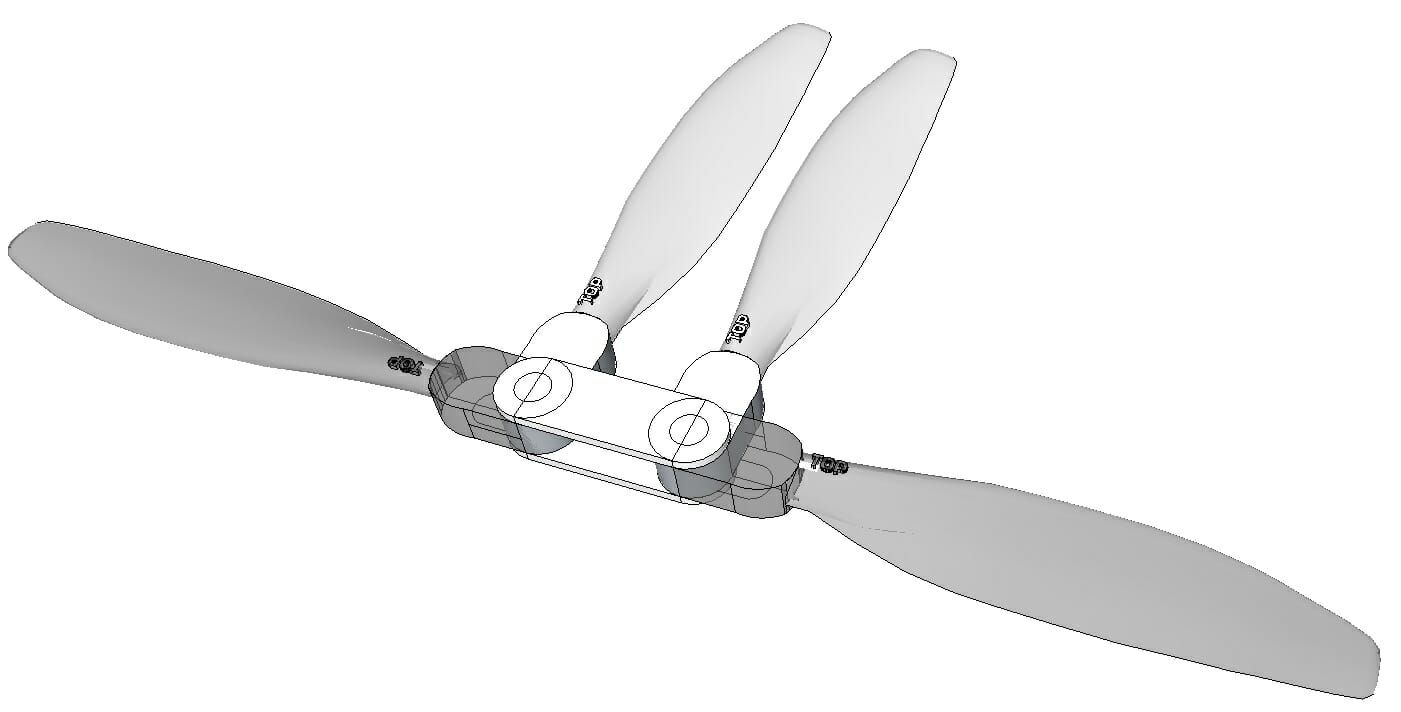
Lipat
Alat peraga lipat memiliki bagian tengah yang terhubung ke dua bilah putar. Ketika pusat (yang terhubung ke poros output motor) berputar, gaya sentrifugal bekerja pada bilah, mendorongnya keluar dan pada dasarnya membuat baling-baling "kaku", dengan efek yang sama seperti baling-baling non-lipat klasik. Karena permintaan yang rendah dan sejumlah besar suku cadang yang dibutuhkan, baling-baling lipat kurang umum. Keuntungan utama dari alat peraga lipat adalah kekompakan, dan dalam kombinasi dengan bingkai lipat, dimensi transportasi drone dapat secara signifikan lebih kecil daripada dimensi penerbangan. Keuntungan bersamaan dari mekanisme pelipatan adalah tidak adanya kebutuhan, jika terjadi kecelakaan, untuk mengganti baling-baling sepenuhnya, itu akan cukup untuk mengganti hanya bilah yang rusak.
Pemasangan
Seperti UAV, rotor dapat memiliki berbagai ukuran. Dengan demikian, ada sejumlah diameter poros motor "standar" di industri. Dalam hubungan ini, rotor utama sering dilengkapi dengan satu set kecil cincin adaptor (terlihat seperti ring dengan lubang dengan diameter berbeda di tengah), yang dipasang di lubang tengah penyangga , jika diameter lubang rotor utama lebih besar dari diameter poros motor yang digunakan. Karena tidak semua pengembang melengkapi alat peraga dengan satu set cincin adaptor seperti itu, disarankan untuk memeriksa diameter lubang alat peraga yang dibeli dengan diameter poros motor Anda terlebih dahulu.
Sekrup dapat dipasang ke motor berdasarkan metode pemasangan yang didukung oleh motor Anda. Jika poros motor tidak menyiratkan opsi pengencang apa pun (sambungan berulir, berbagai perangkat pengencang, dll.), maka adaptor khusus digunakan, seperti propsaver dan klem collet.
- Propsaver
- Collet chuck
Motor brushless dengan rotor luar (tipe "Outrunner"), sebagai aturan, di bagian atasnya, memiliki beberapa lubang beruliradalah opsi yang sama populernya untuk memasang baling-baling ke poros motor BC
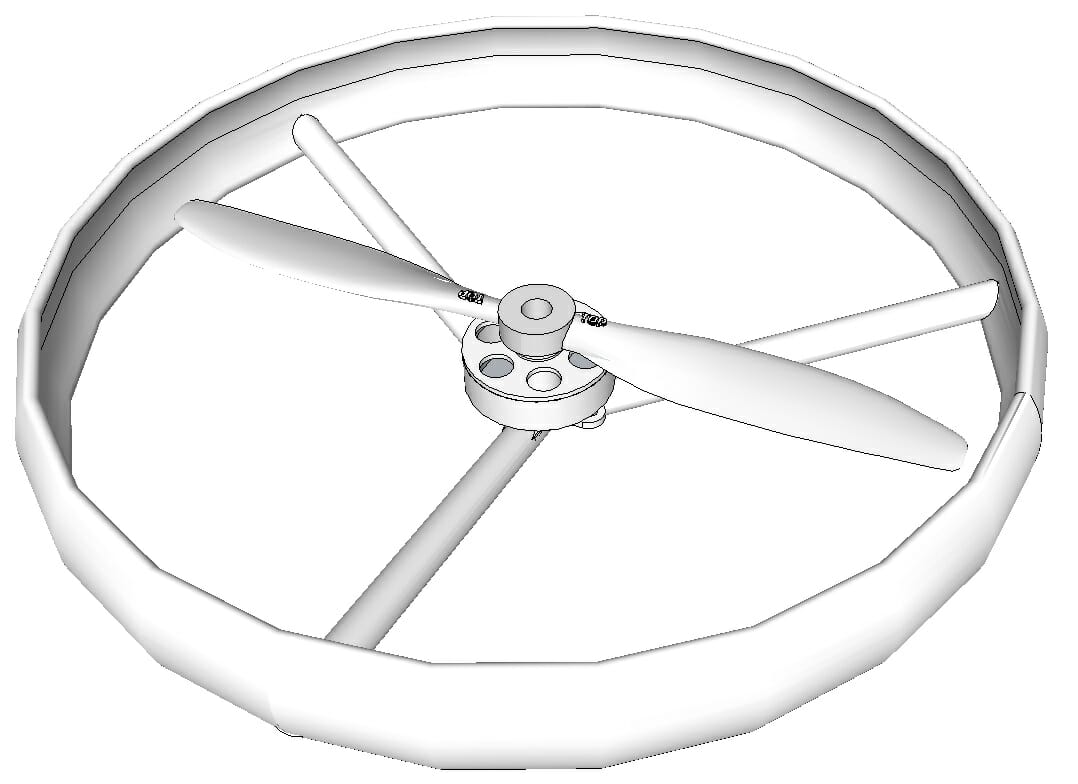
Perlindungan rotor
Perlindungan rotor - dirancang untuk mengecualikan kontak langsung pembangkit listrik UAV dengan objek yang mendekat, sehingga menjaga integritas dan pengoperasiannya, serta untuk mencegah cedera o baling-baling yang berputar cepat akibat tabrakan dengan manusia dan hewan. Pelindung baling-baling terpasang pada rangka utama. Tergantung pada versinya, itu dapat tumpang tindih sebagian dengan area kerja pembangkit listrik, atau sepenuhnya (perlindungan cincin). Proteksi baling-baling paling sering digunakan pada UAV kecil (mainan). Penggunaan elemen pelindung dalam perakitan juga membawa sejumlah kompromi, termasuk:
- Dapat menyebabkan getaran yang berlebihan.
- Umumnya tahan terhadap pukulan ringan.
- Dapat mengurangi daya dorong jika terlalu banyak kaki pemasangan yang ditempatkan di bawah baling-baling.
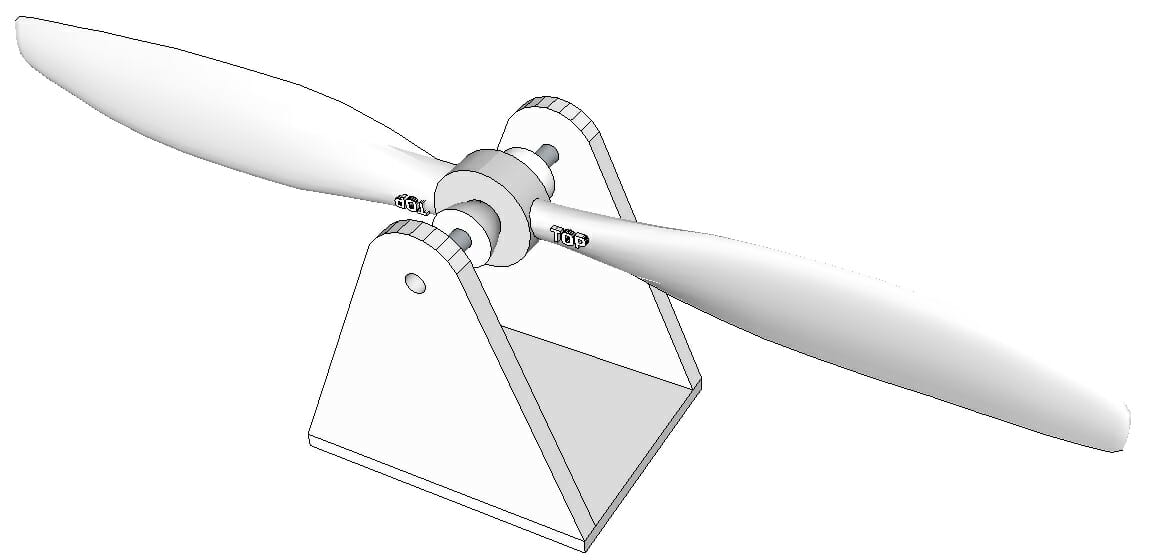
Penyeimbangan
Penyeimbangan yang buruk terjadi pada sebagian besar baling-baling yang murah. Untuk memastikannya, Anda tidak perlu pergi jauh, cukup masukkan pensil ke lubang tengah sekrup (biasanya, dengan ketidakseimbangan, satu sisi akan lebih berat daripada yang lain). Oleh karena itu, sangat disarankan untuk menyeimbangkan alat peraga Anda sebelum memasangnya di motor. Baling-baling yang tidak seimbang akan menyebabkan getaran yang berlebihan, yang pada gilirannya berdampak negatif pada kinerja pengontrol penerbangan (dimanifestasikan dalam perilaku drone yang salah dalam penerbangan), belum lagi peningkatan kebisingan, peningkatan keausan elemen pembangkit listrik, dan penurunan kualitas. kualitas pemotretan kamera yang ditangguhkan.
Baling-baling dapat diseimbangkan dengan cara yang berbeda, tetapi jika Anda membuat drone dari awal, maka di gudang alat harus ada penyeimbang baling-baling murah yang memungkinkan Anda dengan mudah dan sederhana menentukan ketidakseimbangan berat di baling-baling. Untuk menyamakan berat, Anda dapat menggiling bagian terberat dari penyangga (bagian tengah bilah diampelas secara merata, dan dalam hal apa pun tidak memotong bagian baling-baling), Anda juga dapat menyeimbangkan dengan menempelkan selotip (tipis) pada bilah korek api (tambahkan segmen secara merata sampai keseimbangan tercapai). Perhatikan bahwa semakin jauh dari pusat Anda melakukan peningkatan keseimbangan (pengamplasan atau penambahan sabuk) dari baling-baling, semakin besar efek berdasarkan prinsip torsi.
3. ESC
ESC (Pengendali Kecepatan Elektronik Inggris; rus.pengontrol kecepatan elektronik) - memungkinkan pengontrol penerbangan untuk mengontrol kecepatan dan arah motor. Dengan tegangan yang benar, ESC harus mampu menahan max. arus yang dapat dikonsumsi motor, dan juga membatasi arus yang melewati fase selama pensaklaran. Kebanyakan ESC hobi drone hanya memungkinkan motor berputar dalam satu arah, namun dengan firmware yang benar mereka dapat beroperasi di kedua arah.
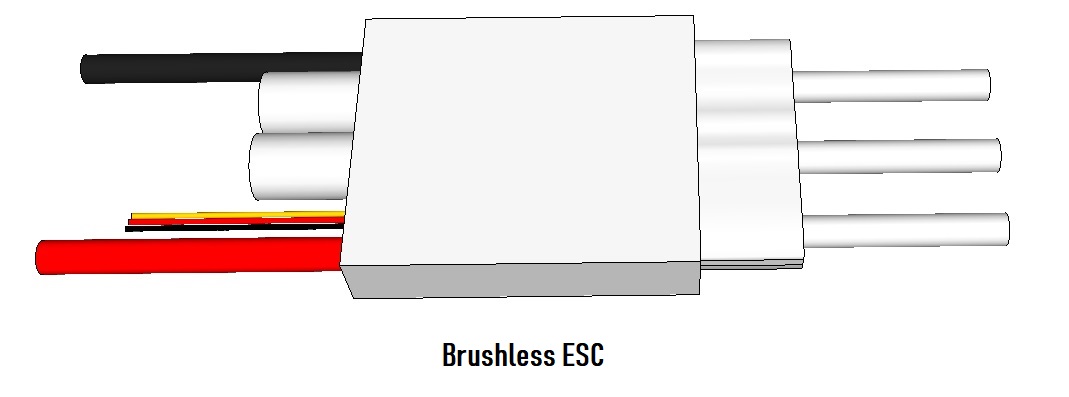
Koneksi
Awalnya, ESC dapat membingungkan karena ada beberapa kabel / pin / konektor yang tersedia untuk menghubungkannya. sisi (ESC dapat datang dengan atau tanpa konektor yang disolder).
- Power Supply: Dua kabel tebal (biasanya hitam dan merah) disediakan untuk memasok daya dari papan distribusi / harness yang dayanya berasal langsung dari baterai utama pesawat.
- 3 konektor: Tiga konektor tersedia di sisi berlawanan dari pengontrol untuk menghubungkan ke tiga konektor peluru (biasanya disertakan dengan motor) pada motor tanpa sikat. Penggunaan konektor saat menghubungkan ESC memungkinkan, jika perlu (jika terjadi kegagalan), dengan cepat mengubah pengontrol tanpa menggunakan besi solder. Kebetulan konektor berbentuk peluru yang disertakan dengan motor tidak cocok dengan konektor pada regulator, dalam hal ini, cukup ganti dengan yang sesuai. Manakah dari ketiganya yang "plus" dan mana yang "minus"? Titik referensi adalah kabel positif sederhana yang datang dari baterai, masuk ke positif pada ESC, sama halnya dengan minus.
- Konektor servo R / C 3-pin dengan kabel tipis: melalui mana sinyal yang berasal dari penerima diproses, di mana satu kabel adalah sinyal (transmisi sinyal gas ke ESC atau input), "Minus" kedua (atau ground), dan kabel positif (tidak digunakan jika tidak ada BEC built-in; dengan BEC built-in, ini adalah output daya 5V, yang nantinya dapat digunakan untuk menyalakan elektronik terpasang).
BEC
Pada hari-hari awal pemodelan pesawat, mesin pembakaran internal digunakan sebagai pembangkit listrik, dan elektronik onboard ditenagai oleh baterai. Dengan munculnya traksi dan pengontrol listrik (ESC), pada yang terakhir, mereka mulai memasukkan apa yang disebut sirkuit eliminasi baterai - BEC (dalam bahasa Inggris. Battery Eliminator Circuit; atau konverter daya terpasang; sebagai aturan, ia menyediakan sumber arus tambahan dengan tegangan 5V pada arus 1A, atau lebih tinggi). Dengan kata lain, ini adalah konverter tegangan yang digunakan dalam perakitan LiPo menjadi tegangan untuk menyalakan elektronik on-board drone.
Saat merakit multirotor, semua ESC harus terhubung ke pengontrol penerbangan, tetapi hanya satu BEC yang diperlukan, jika tidak, masalah dapat muncul saat menyalakan saluran yang sama. Karena biasanya tidak ada cara untuk menonaktifkan BEC pada ESC, yang terbaik adalah melepas kabel merah () dan membungkusnya dengan pita listrik untuk semua kecuali satu ESC. Penting juga untuk meninggalkan kabel hitam (arde) untuk kesamaan.
Firmware
Tidak semua ESC di pasaran sama baiknya untuk aplikasi multi-rotor. Penting untuk dipahami bahwa sebelum munculnya UAV multi-mesin, motor brushless digunakan terutama sebagai pembangkit listrik untuk mobil, pesawat terbang, dan helikopter yang dikendalikan radio. Sebagian besar tidak memerlukan waktu respons yang cepat atau pembaruan. ESC dengan perangkat lunak tertanam SimonK atau BLHeli mampu bereaksi sangat cepat terhadap perubahan yang masuk, yang umumnya membuat perbedaan antara penerbangan stabil atau kecelakaan.
Distribusi Daya
Karena setiap ESC ditenagai oleh baterai utama, konektor baterai utama entah bagaimana harus dipecah menjadi empat ESC. Ini dilakukan dengan menggunakan Power Distribution BoardPower Distribution HarnessDean
4. Baterai
Kimia
Baterai yang digunakan pada kendaraan udara tak berawak saat ini eksklusif lithium polymer (LiPo), dan komposisi beberapa di antaranya cukup eksotis - lithium mangan atau lithium lainnya varian. Asam timbal sama sekali tidak cocok dan NiMh / NiCd masih terlalu berat untuk kapasitasnya dan seringkali tidak dapat memberikan tingkat debit tinggi yang diperlukan. LiPo menawarkan kinerja tinggi dan tingkat debit dengan bobot rendah. Kerugiannya adalah biayanya yang relatif tinggi dan masalah keamanan yang konstan (bahaya kebakaran).
Tegangan
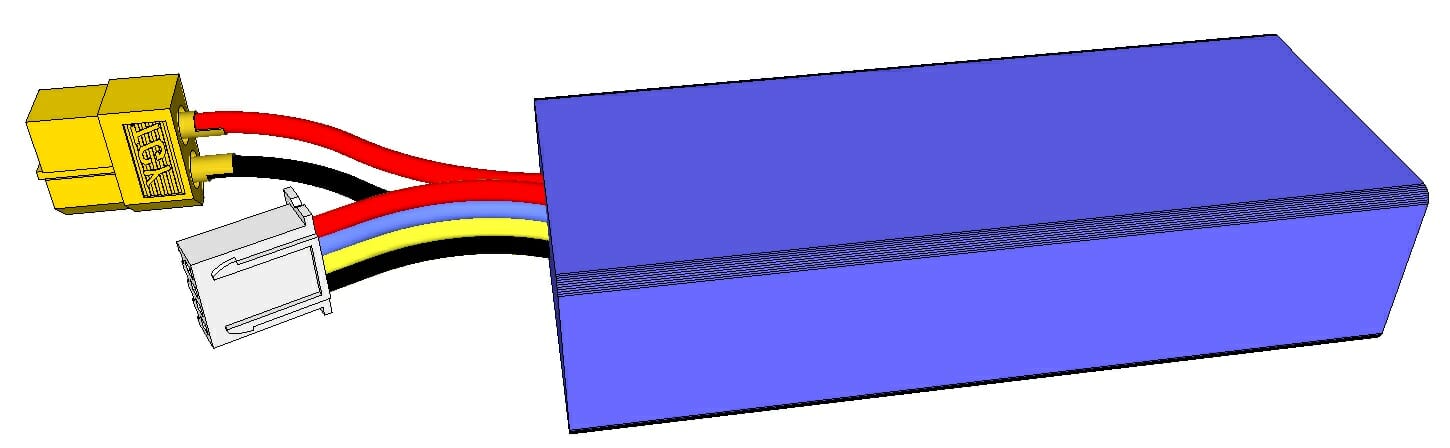
Dalam praktiknya, Anda hanya membutuhkan satu baterai untuk UAV Anda. Tegangan baterai ini harus sesuai dengan motor BK yang Anda pilih. Hampir semua baterai yang digunakan saat ini berbasis lithium dan mengandung beberapa sel (kaleng) masing-masing 3,7V, di mana 3,7V = 1S (yaitu baterai satu kaleng; 2S adalah baterai dua kaleng, dll.). Oleh karena itu, baterai berlabel 4S kemungkinan memiliki nilai nominal 4 × 3.7V = 14.8V. Juga, jumlah kaleng akan membantu Anda menentukan pengisi daya mana yang akan digunakan. Perhatikan bahwa baterai sel tunggal berkapasitas tinggi mungkin secara fisik terlihat seperti baterai multi-sel berkapasitas rendah.
Kapasitas
Kapasitas baterai diukur dalam ampere-jam (Ah). Baterai kecil bisa berkapasitas 0.1Ah (100mAh), kapasitas baterai untuk drone berukuran sedang bisa berkisar 2-3Ah (2000mAh - 3000mAh). Semakin tinggi kapasitasnya, semakin lama waktu penerbangannya, dan, karenanya, semakin berat baterainya. Waktu penerbangan UAV konvensional dapat berkisar antara 10-20 menit, yang mungkin tampak berumur pendek, tetapi Anda harus memahami bahwa drone terus-menerus berjuang melawan gravitasi selama penerbangan, dan tidak seperti pesawat terbang, ia tidak memiliki permukaan. (sayap) yang memberikan bantuan berupa gaya angkat yang optimal.
Tingkat Discharge
Tingkat Discharge Baterai Lithium diukur dalam "C" di mana 1C adalah kapasitas baterai (biasanya dalam jam ampere kecuali Anda mempertimbangkan drone ukuran Telapak). Laju pengosongan sebagian besar baterai LiPo setidaknya 5C (lima kali kapasitas), tetapi karena sebagian besar motor yang digunakan dalam UAV multi-rotor mengkonsumsi banyak arus, baterai harus dapat melepaskan daya pada arus yang sangat tinggi, yang biasanya sekitar 30A atau lebih.
Keselamatan
Baterai LiPo tidak sepenuhnya aman karena mengandung gas hidrogen bertekanan dan memiliki kecenderungan untuk terbakar dan/atau meledak ketika ada sesuatu yang salah. Jadi, jika Anda ragu tentang kesehatan baterai, jangan hubungkan ke drone atau bahkan ke pengisi daya - anggap itu "dinonaktifkan" dan buang dengan benar. Tanda-tanda bahwa ada sesuatu yang salah dengan baterai adalah penyok atau bengkak (yaitu kebocoran gas). Saat mengisi baterai LiPo, yang terbaik adalah menggunakan brankas LiPo box (Battery safe box). Penyimpanan baterai

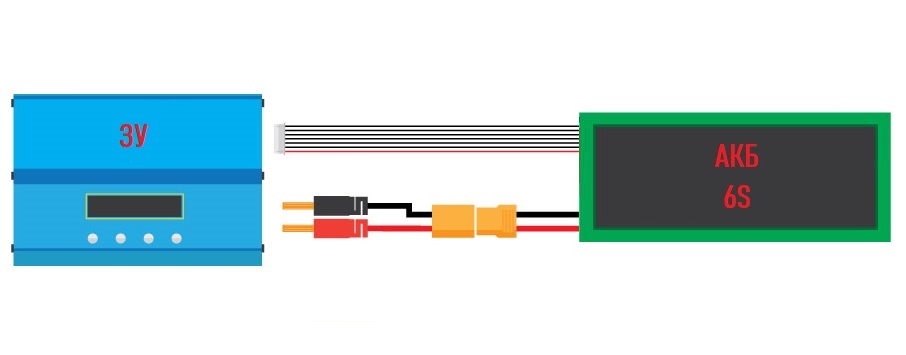
Pengisian
Sebagian besar baterai LiPo memiliki dua konektorPengisi dayamasalah keamanan yang terkait dengan baterai polimer lithium
.Pemasangan
Baterai adalah elemen terberat dari drone, sehingga harus dipasang di pusat mati pusat untuk memastikan beban yang sama pada motor. Baterai tidak melibatkan pemasangan khusus (terutama sekrup self-tapping yang dapat merusak LiPo dan menyebabkan kebakaran), sehingga beberapa metode pemasangan yang digunakan saat ini termasuk tali Velcro, karet, kompartemen plastik, dan lain-lain. Opsi pemasangan baterai yang paling umum adalah menggantung baterai di bawah bingkai menggunakan tali Velcro.







