Isi
- drone DIY: Pelajaran 1. Terminologi.
- Drone buatan sendiri: Pelajaran 2. Bingkai.
- Drone buatan sendiri: Pelajaran 3. Pembangkit listrik.
- Drone buatan sendiri: Pelajaran 4. Pengontrol penerbangan.
- Drone buatan sendiri: Pelajaran 5. Perakitan.
- Drone buatan sendiri: Pelajaran 6. Pemeriksaan kinerja.
- Do-it-yourself drone: Pelajaran 7. FPV dan jarak.
- Drone dengan tanganmu sendiri: Pelajaran 8. Pesawat terbang.
Pendahuluan
Sekarang setelah Anda memilih semua komponen utama untuk UAV Anda, Anda dapat mulai merakit. Panduan ini akan membahas kesalahan umum saat merakit UAV multi-rotor, bersama dengan beberapa tip berguna untuk penyetelan. Pelajaran ini tidak akan mencakup item seperti kamera / sistem FPV, perangkat jarak jauh atau aksesori lainnya (kita akan membahasnya dalam 7 pelajaran).
Komponen yang harus Anda miliki pada tahap ini:
- Bingkai (dibeli atau dibuat dengan tangan)
- Motor, ESC, baling-baling, baterai, perangkat pengisi daya
- Papan distribusi daya / harness
- Pengontrol penerbangan dan perangkat komunikasi (kontrol radio diusulkan)

Propulsi
Untuk mencapai tujuan pelajaran ini, sistem propulsi UAV Anda akan mencakup komponen berikut:
- Motor
- ESC
- Distribusi Daya (board atau harness)
- Baterai
- Flight Controller
Perhatikan bahwa baling-baling tidak terdaftar. Jangan memasang baling-baling pada tahap ini! Sekrup utama hanya akan dihubungkan di pelajaran ke-6. Karena ini adalah drone pertama Anda, kami sarankan untuk membuat sambungan listrik "tanpa bingkai" sebelum memasang semua yang ada di bingkai; untuk memeriksa semua koneksi dan menghilangkan kesalahan yang teridentifikasi.
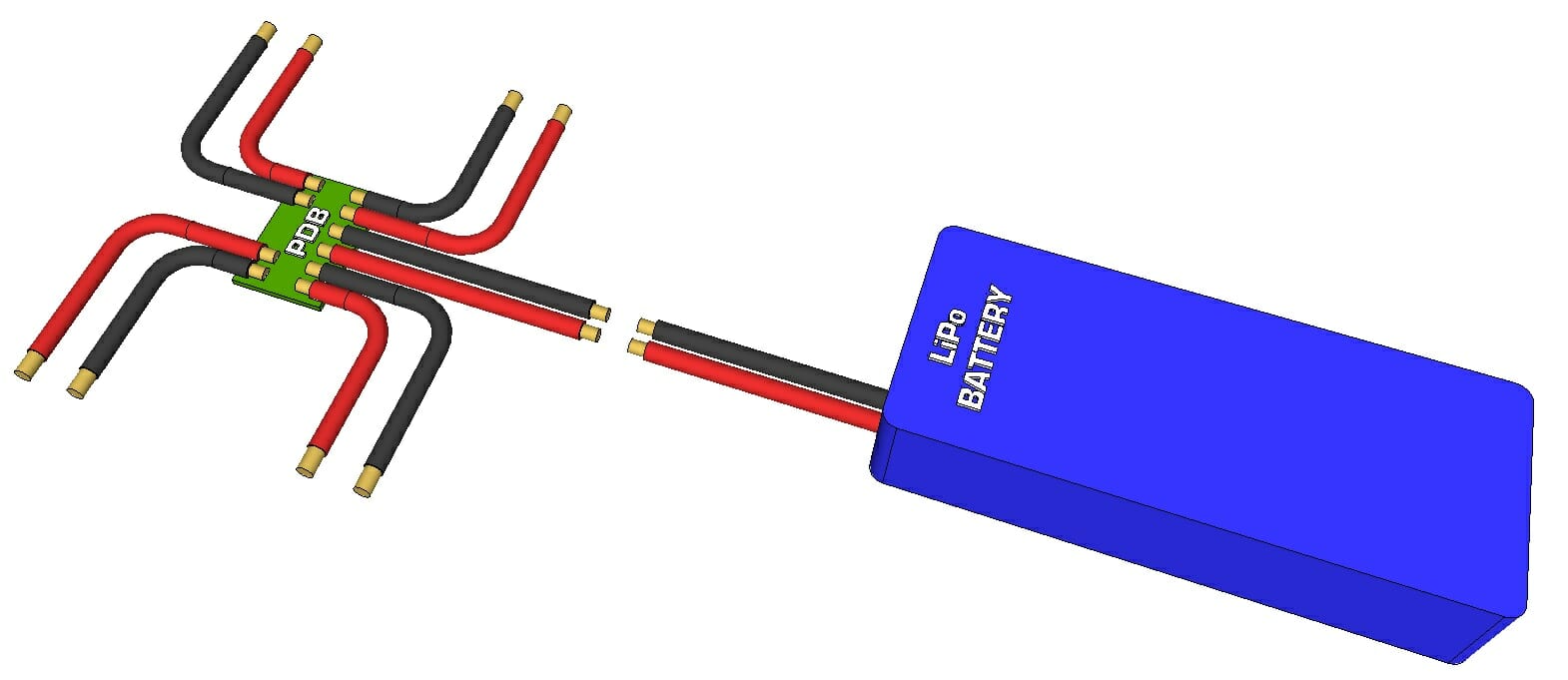
Baterai. Distribusi Daya
Hubungan antara baterai dan sistem distribusi daya harus relatif sederhana jika keduanya memiliki jenis konektor yang sama. Jika sudah, maka lanjutkan ke langkah berikutnya. Jika konektornya berbeda, maka jangan pernah potong kabel baterai untuk memisahkan konektor; ini dapat menyebabkan korsleting dan sengatan listrik yang tidak menyenangkan! Sebagai gantinya, Anda dapat mengambil adaptor dan menggunakannya di antara konektor pada baterai dan konektor pada papan distribusi daya. Pilihan lain mungkin untuk mencari konektor kawin ke konektor baterai, dan membelinya; kemudian potong konektor yang ada dari distributor daya dan solder pengganti yang dibeli, pertama-tama pastikan tidak ada hubungan antara pin positif dan negatif.
Penting untuk dicatat bahwa sebagian besar UAV multi-rotor tidak memiliki sakelar hidup / mati, sehingga daya disuplai dan diputuskan dengan menghubungkan dan melepaskan baterai utama dari konektor distributor daya, sehingga konektornya harus diikat dengan aman dan kabel / titik solder diisolasi dengan baik dengan tabung panas menyusut dan / atau pita listrik.
Lepaskan baterai dari distributor daya sebelum melanjutkan.
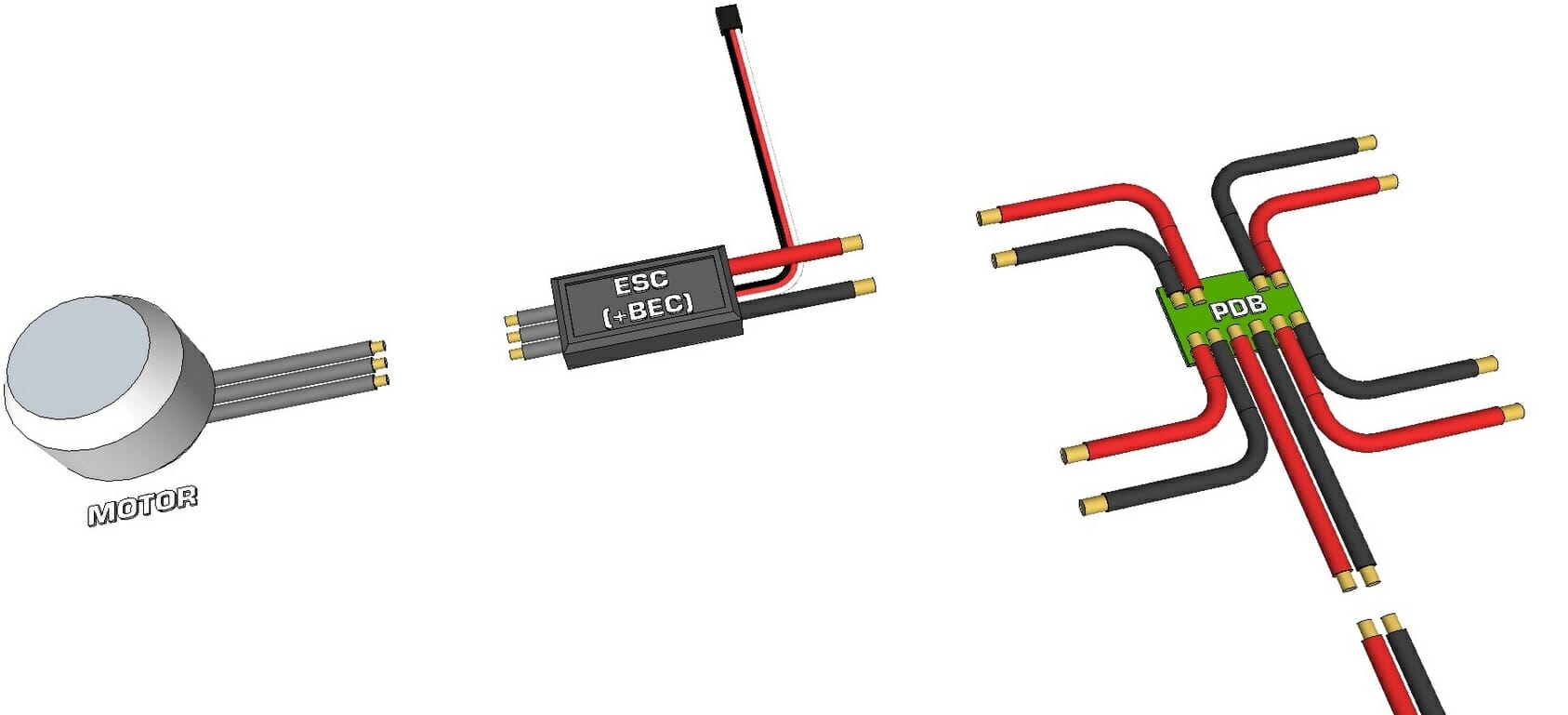
Motor. ESC. Distribusi Daya
Power Distribution Board (PDP) atau distribusi kabel terutama berfungsi untuk mendistribusikan daya dari baterai utama ke masing-masing ESC. Tegangan disuplai ke ESC "sebagaimana adanya", sehingga tidak perlu menambah (menambah) atau menurunkan (menurunkan) tegangan. Jika drone Anda memiliki empat motor, maka Anda harus memiliki empat ESC, dan oleh karena itu distribusi papan / kabel distribusi Anda pada akhirnya akan membagi baterai utama menjadi empat koneksi. Jika PRP Anda memiliki enam koneksi, dan Anda sedang membangun quadrocopter, maka Anda tidak perlu menghubungkan dua koneksi terakhir. Jika Anda membuat hexacopter, PDP Anda harus mendistribusikan daya dari baterai utama ke enam sambungan. ESC mencakup kabel berikut:
- Satu pita 3-kawat 0,1 inci dengan konektor R / C, di mana pin hitam biasanya di-ground, yang merah menyediakan output 5V (melalui BEC*) dan kuning / putih adalah input sinyal.
- Tiga kabel terpisah terhubung ke tiga kabel pada motor DC tanpa sikat (biasanya disertakan dengan konektor peluru wanita yang sudah disolder atau disertakan).
- Dua konektor input untuk menghubungkan baterai ke PDB (beberapa termasuk konektor yang disolder dengan solder, beberapa disertakan, dan terkadang tidak sama sekali).
*ESC biasanya memiliki Sirkuit Penghilang Baterai (atau BEC) bawaan yang mengubah tegangan baterai utama menjadi 5V untuk memberi daya pada penerima dan pengontrol penerbangan. 5V biasanya disuplai melalui konektor RC dari ESC (biasanya pin tengah/merah). Anda hanya perlu satu BEC untuk menyalakan pengontrol penerbangan.
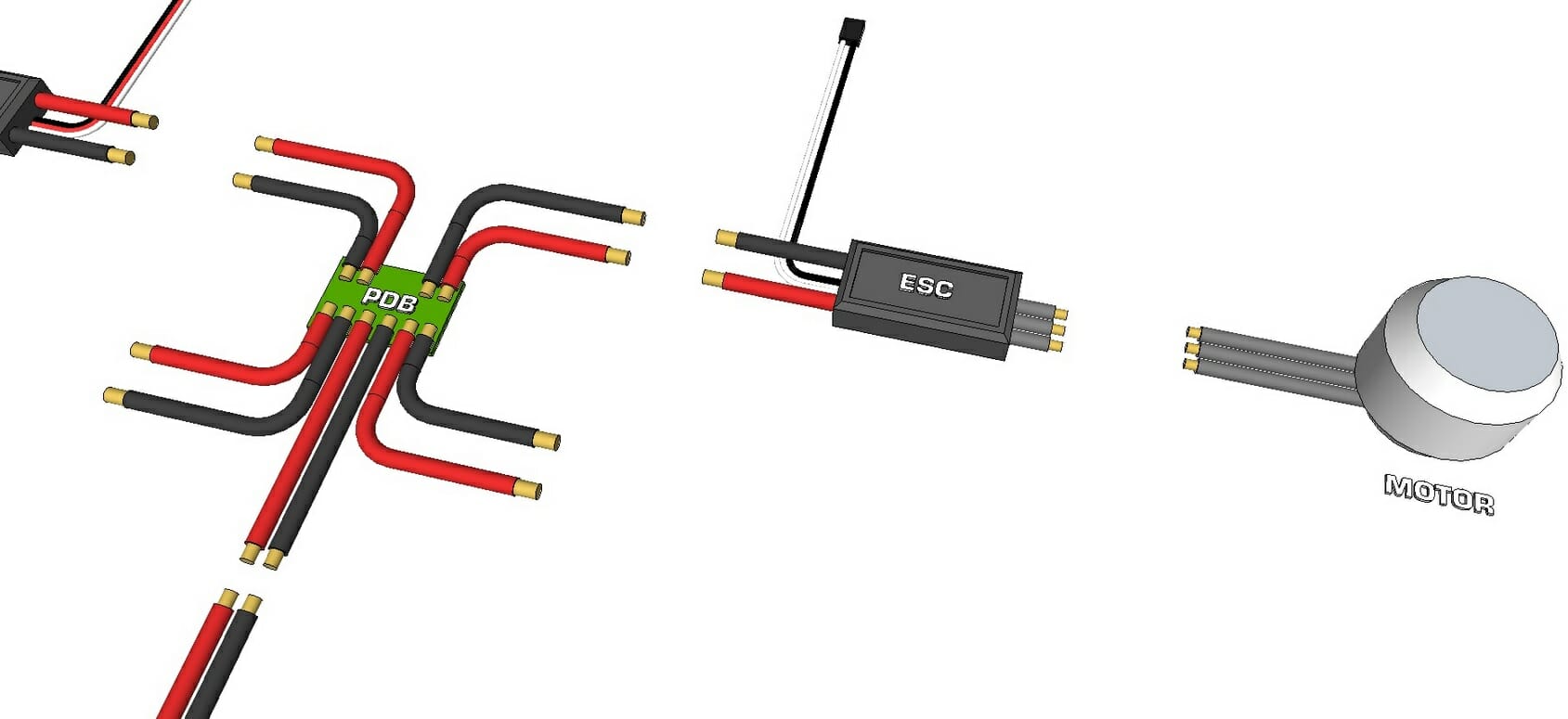
Jika papan distribusi daya menggunakan konektor yang tidak cocok dengan konektor pada ESC atau baterai, maka Anda harus membeli adaptor (adaptor), atau membeli konektor baru dan menggantinya di ESC atau PRP. Keuntungannya tetap dengan papan distribusi daya, konektor yang cocok dengan baterai dan ESC. Paling sering, baterai lithium-polimer dari UAV dapat memiliki konektor DEANSXT60EC3
Jika Anda ingin memberi daya tambahan pada elektronik arus rendah (lampu LED, liontin, dll.) tetapi tidak ada sambungan cadangan pada papan distribusi daya, Anda dapat menggunakan kabel pengisi daya baterai. Konektor pengisi daya berwarna putih biasanya memiliki satu pin untuk ground dan satu pin untuk setiap sel (1S, 2S, 3S, dll.) yang digunakan dalam unit baterai LiPo. Meskipun konektor ini benar-benar hanya untuk mengisi daya baterai, konektor ini dapat memberikan tegangan output 3,7V dari setiap pin dan dapat digunakan untuk memberi daya pada elektronik arus rendah seperti harness atau LED.
- Lepaskan kabel merah dari setiap konektor R / C 3-pin dari cruise control kecuali satu. Disarankan agar Anda melakukan ini sedemikian rupa sehingga Anda selalu dapat memasangnya kembali jika perlu. Bungkus ujung setiap kabel yang dikecualikan dengan pita listrik atau gunakan tabung panas menyusut untuk isolasi sehingga nantinya tidak dapat bersentuhan dengan elektronik lainnya. Satu-satunya kabel merah yang tidak tersentuh akan memberi daya pada pengontrol penerbangan yang digunakan dalam perakitan.
- Hubungkan dua kabel suplai dari masing-masing ESC ke papan distribusi, pastikan kabel merah ke positif () dan kabel hitam ke negatif (-).
- Jika papan distribusi daya yang Anda gunakan memiliki konektor R / C sendiri, maka dalam hal ini terserah Anda untuk menghubungkan pin R / C masing-masing ESC ke konektor R / C pada papan ini atau hubungkan langsung ke pengontrol penerbangan.
- Hubungkan masing-masing dari tiga konektor motor ke tiga konektor ESC. Saat ini, urutan penyambungan konektor ini tidak penting (jika itu memengaruhi arah putaran, itu akan diperbaiki sesuai kebutuhan nanti).
Harap dicatat bahwa jika Anda memutuskan untuk melepas atau menyembunyikan kabel pada tahap ini, Anda mungkin perlu mengakses beberapa koneksi sesuai dengan prosedur yang dijelaskan dalam Pelajaran 6, khususnya, menukar koneksi antara ESC dan motor sehingga motor berputar ke arah yang berlawanan.

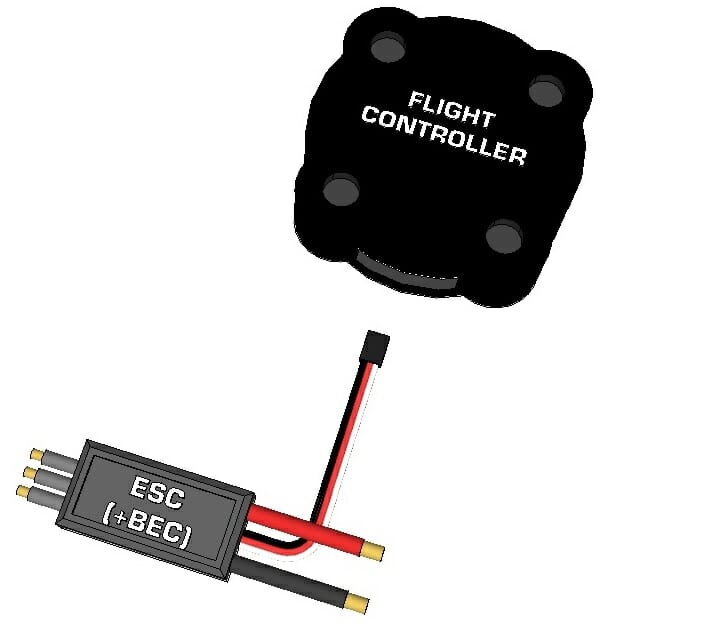
ESC. Pengendali penerbangan.
Sekarang Anda dapat menghubungkan input R / C dari cruise controller ke flight controller. Pengontrol penerbangan yang Anda pilih harus memiliki diagram yang menunjukkan pin pengontrol mana yang terhubung ke motor rakitan multi-rotor Anda. Diagram ini juga harus menunjukkan arah putaran masing-masing motor, tetapi sekali lagi, Anda tidak perlu mempertimbangkan arahnya untuk saat ini.
- Lihat diagram koneksi antara motor / ESC dan pengontrol penerbangan di manual instruksi PC.
- Hubungkan konektor R/C masing-masing ESC ke pin yang sesuai pada flight controller, pastikan kabel ground (biasanya hitam) terhubung ke pin ground dari flight controller dan pin sinyal (putih atau kuning) terhubung ke pin sinyal pada pengontrol penerbangan...
- Hanya satu konektor RC yang masih memiliki pin merah (daya).
Komunikasi
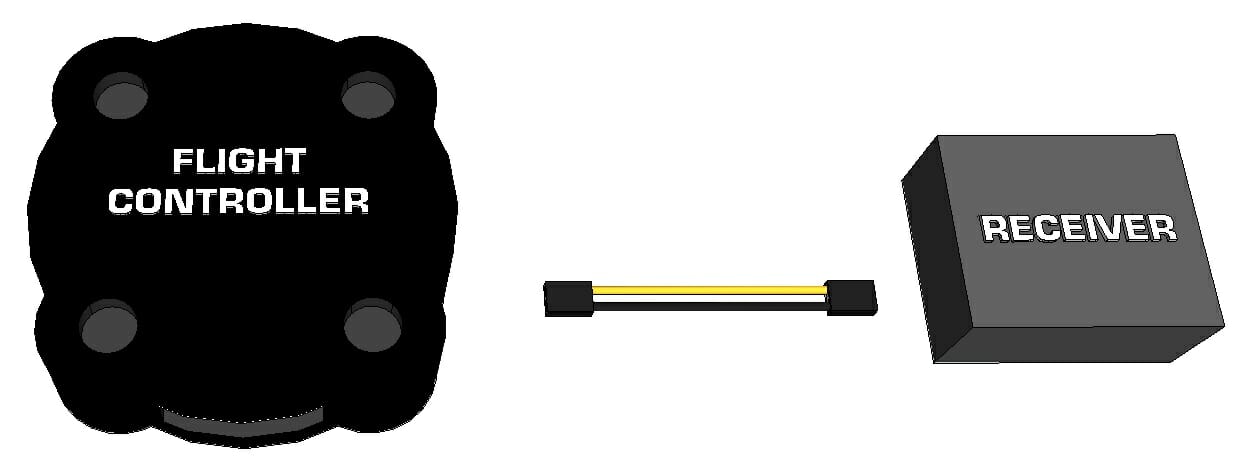
Penerima. Pengendali penerbangan.
Misalkan dalam pelajaran ini Anda telah membuat pilihan yang mendukung kontrol radio sebagai perangkat input. Jika Anda ingin menggunakan WiFi, Bluetooth, atau metode input lainnya, silakan baca manual pengontrol penerbangan dan cari input serial; Bagian ini akan menjelaskan bagaimana / di mana menghubungkan perangkat input serial ke pengontrol penerbangan. Kemungkinan besar Anda perlu menemukan dan menghubungkan pin pemancar (Tx), penerimaan (Rx), tegangan (5V), dan GND dari perangkat nirkabel ke pemancar, memungkinkan Rx dari satu ke Tx lainnya, dan sebaliknya.
Pemancar RC Anda harus dilengkapi dengan penerima RC yang sesuai. Penerima harus diikat ke pemancar sehingga Anda dapat melepaskan jumper pengikat dari penerima (jika ada). Kit ini juga dapat menyertakan dudukan baterai AA, yang dirancang untuk memberi daya pada receiver, tetapi kami tidak akan menggunakannya karena BEC akan memberi daya pada receiver dan pengontrol penerbangan. Untuk mengetahui saluran penerima RC mana yang terhubung ke pin mana pada pengontrol penerbangan, Anda perlu melihat manual pengguna dari pengontrol penerbangan dan sistem RC.
Manual pengontrol penerbangan akan menunjukkan lokasi pin berikut untuk dicocokkan dan dihubungkan ke penerima:
- Throttle
- Pitch
- Yaw
- Roll
- Saklar Aux 1, 2, 3, dll.
Sekarang Anda dapat membuat koneksi berikut:
- Baca manual pengontrol penerbangan untuk melihat pin input R / C mana yang terhubung dengan yang mana dari fungsi di atas.
- Baca manual pemancar yang salurannya terkait dengan setiap fungsi.
- Beberapa pemancar RC dapat diprogram ulang untuk mengubah fungsi setiap kontak. Jika Anda memutuskan untuk mengubah input apa pun (joystick atau sakelar), lakukan hanya setelah memastikan Anda mengetahui saluran mana pada receiver yang sesuai dengan fungsi mana. Throttle, Pitch, Yaw, dan Roll harus selalu dikaitkan dengan dua stick / joystick, bukan sakelar atau tombol.
- Hubungkan saluran Throttle pada receiver ke input Throttle pada pengontrol penerbangan.
- Hubungkan saluran Pitch pada receiver ke input Pitch pada pengontrol penerbangan.
- Hubungkan saluran Yaw pada penerima ke input Yaw pada pengontrol penerbangan.
- Hubungkan GND pada pengontrol penerbangan (biasanya pin baris ketiga) ke GND pada penerima (biasanya pin baris ketiga).
- Jika input tambahan akan digunakan, sambungkan Aux 1 pada penerima ke Aux 1 pada pengontrol penerbangan, dan seterusnya.
Anda dapat menggunakan kabel servo 3-pin untuk setiap saluran, tetapi hanya satu saluran (bisa apa saja) yang harus memiliki voltase dan ground; selebihnya hanya membutuhkan kabel sinyal. Semua koneksi dapat berupa GND ke GND, meskipun hanya satu yang diperlukan. Sekali lagi, receiver tidak memerlukan baterai terpisah karena akan ditenagai oleh pengontrol penerbangan, yang ditenagai oleh BEC dari salah satu ESC.
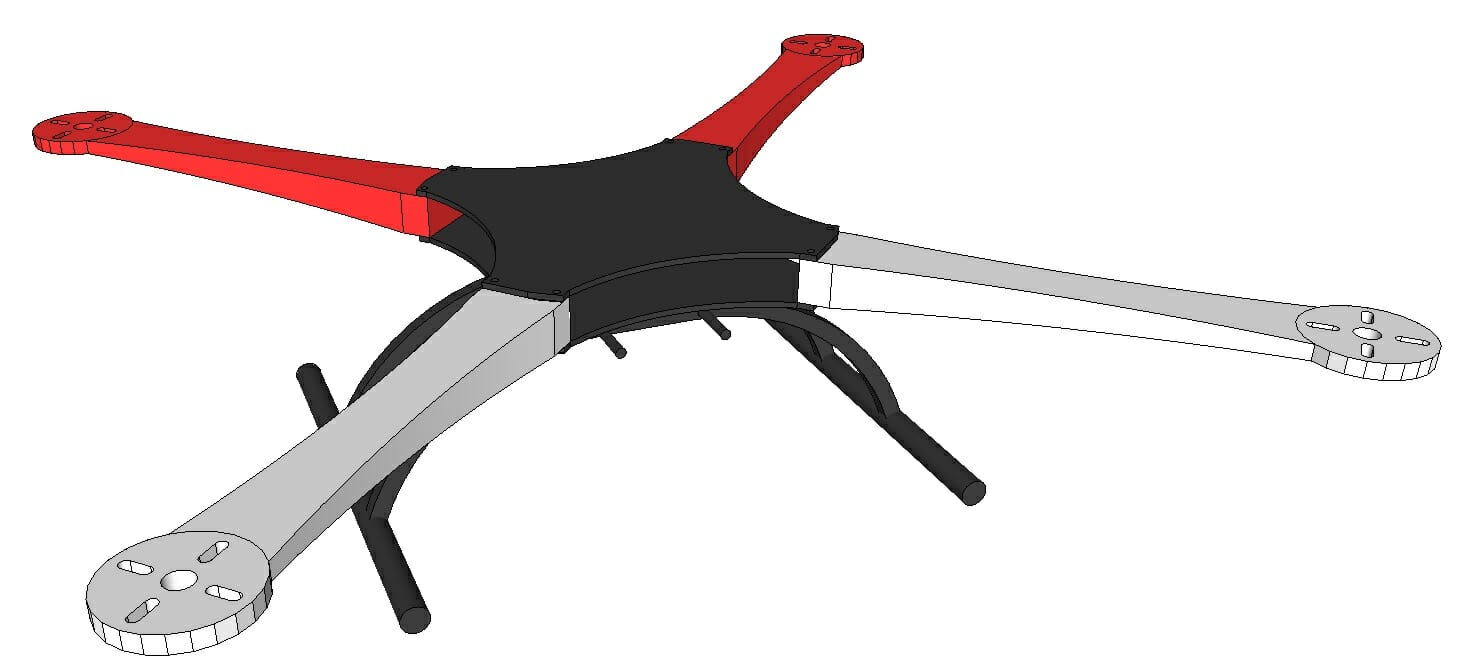
Memasang Bingkai
Jika Anda membuat bingkai sendiri, Anda dapat merakitnya pada tahap ini. Jika Anda membeli kit bingkai, ikuti petunjuk perakitan. Harap dicatat bahwa Anda mungkin perlu membongkar area tertentu untuk memudahkan penyambungan atau melepas (menyembunyikan) elemen listrik. Tujuannya adalah untuk memastikan tidak ada yang longgar, semua kabel terpasang dengan aman, dan tidak ada yang bisa jatuh dari bingkai atau kusut.
Pemasangan
Lokasi baterai.
Baterai yang digunakan untuk daya sering kali merupakan elemen terberat pada UAV dan dapat berkisar dari 1/4 hingga 1/2 dari total beratnya. Karena itu, tempat pemasangannya sangat penting. Lokasi ideal untuk baterai utama harus berada di tengah pesawat sehingga semua motor dapat menangani beban yang kira-kira sama. Jika baterai terletak lebih dekat ke bagian belakang pesawat, motor belakang perlu memberikan lebih banyak daya dorong daripada motor depan, dan oleh karena itu daya dorong total maksimum akan dibatasi (ketika motor belakang berada pada daya dorong penuh, tidak akan ada dorong pada motor depan). Padahal, pendekatan yang biasa dilakukan dalam desain multi-rotor adalah menjaga pesawat tetap simetris di sekitar garis tengah (atau setidaknya satu sumbu), jadi baterai harus ditempatkan di sepanjang garis tengah itu daripada digeser ke satu sisi atau sisi lainnya...
Selanjutnya, Anda perlu memutuskan pada ketinggian berapa baterai akan diletakkan. Ada beberapa tempat di mana baterai dapat dipasang:
- Di bawah rangka (pesawat akan berat di bawah, lebih stabil dan kurang akrobatik).
- Langsung di bawah motor (biasanya di dalam rangka); mungkin salah satu tempat terbaik.
- Pada ketinggian yang sama dengan mesin atau rotor (misalnya dipasang di atas rangka).
- Di atas baling-baling (UAV akan lebih berat di atas dan lebih rentan terbalik).
Untuk performa terbaik, idealnya baterai berada di posisi 3 di atas. Posisi 4 menciptakan efek pendulum terbalik, dan jika UAV miring melebihi sudut tertentu, drone akan cenderung terbalik. Posisi 1 akan menciptakan platform yang cukup stabil yang menurut sifatnya cenderung tetap datar, tetapi sangat tidak cocok untuk akrobat. Oleh karena itu, sebagian besar desainer memilih posisi 2 dan menempatkan baterai langsung di bawah bingkai atau di dalamnya. Pendekatan ini membebaskan ruang di bawah rangka untuk muatan seperti sistem suspensi, dan ruang di atas untuk pengontrol penerbangan dan elektronik lainnya agar dapat diakses semudah mungkin.
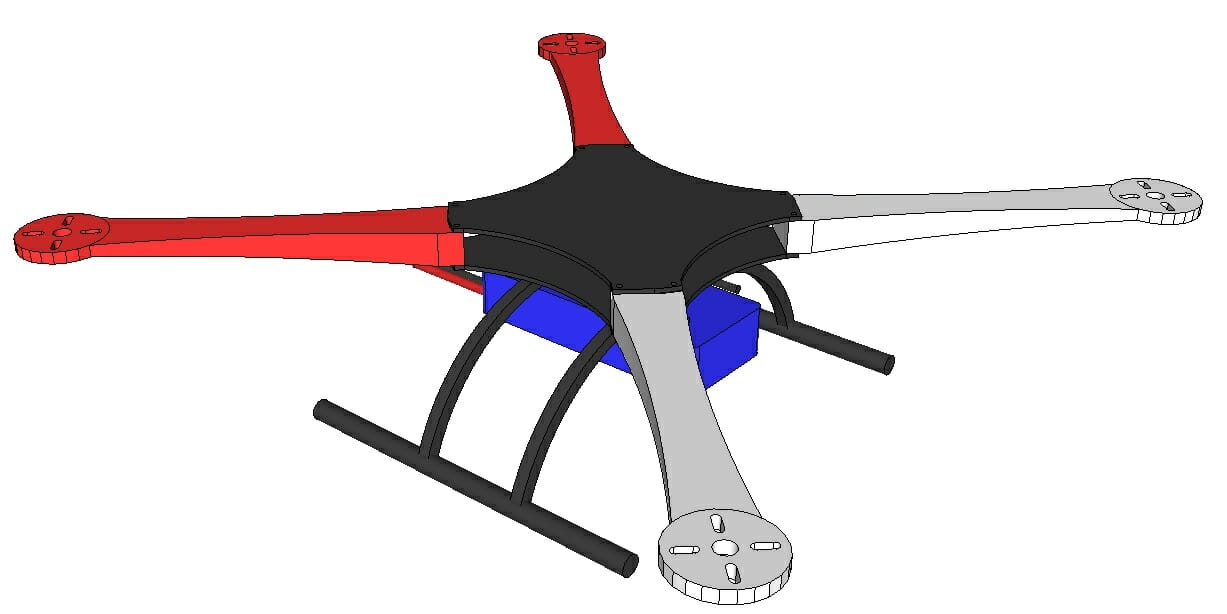
Pemasangan Baterai
Ada banyak cara umum untuk memasang baterai ke rangka, termasuk:
- Tali velcro
- Velcro berperekat (satu sisi direkatkan ke baterai dan sisi lainnya di bingkai)
- Di bingkai
Tali velcro paling umum digunakan untuk "standar" sedang ” ukuran drone kustom Sementara bingkai kandang paling sering ditemukan pada drone komersial, bingkai UAV tersebut disusun di bawah tekanan dan meninggalkan ruang di dalam khusus untuk baterai tertentu. Velcro idealnya hanya digunakan jika baterai relatif ringan; alih-alih satu bagian pendek di tengah, disarankan untuk merekatkan satu strip di sepanjang baterai. Jika Anda menggunakan tali Velcro dan menemukan bahwa baterai cenderung keluar karena kurangnya pegangan, Anda disarankan untuk menambahkan strip karet di mana baterai menyentuh tali. Tidak disarankan menggunakan lem untuk mengencangkan baterai ke rangka. Jika Anda tidak menggunakan UAV, keluarkan baterai dan simpan dalam kantong aman LiPo atau wadah keramik.
Mengisi baterai
Kemungkinan besar Anda telah memilih Lithium Polymer (LiPo) atau baterai lithium lainnya. Sebagian besar baterai LiPo di atas 3.7V memiliki kabel pengisi daya terpisah dengan konektor multi-pin untuk pengisian daya, sedangkan kabel daya dapat diidentifikasi dengan adanya konektor dua-pin dengan kabel yang lebih besar yang mampu menahan arus pelepasan yang tinggi. Konektor pengisi daya biasanya memiliki satu kontak untuk setiap bank baterai, serta kontak ground yang sama.
Karena bahaya yang terkait dengan baterai LiPo (hidrogen dan listrik), merupakan praktik umum untuk melepas baterai sepenuhnya dari drone saat tidak digunakan dan memasukkannya ke dalam kantong LiPo Safe. Tas yang sama digunakan saat mengisi baterai (hubungkan baterai ke pengisi daya, masukkan baterai ke dalam tas (biarkan pengisi daya berada di luar tas) dan tutup (biasanya memiliki penutup Velcro).
.Penempatan dan Pemasangan Flight Controller
Idealnya, flight controller harus ditempatkan di tengah drone pada ketinggian yang sama dengan motor. Jika ini tidak memungkinkan, maka controller dapat ditempatkan sedikit lebih tinggi atau lebih rendah. arah ke kiri atau kanan, dan hindari memasangnya ke depan atau ke belakang. Jika Anda membeli bingkai untuk UAV, ini sering memiliki lubang pemasangan untuk pengontrol penerbangan, yang berada di tempat yang optimal. Pengontrol penerbangan dapat diperbaiki dengan salah satu cara dasar berikut:
- Sekrup / Mur / Tegak (dasar)
- Pita dua sisi (pastikan cukup kuat)
- Pita busa dua sisi (untuk mencapai efek redaman)
- Busing peredam karet (untuk redaman tinggi)
Beberapa pengendali penerbangan memiliki atau mungkin memiliki kotak pelindung opsional.
Pada tahap ini Anda harus memiliki UAV yang dirakit dan terhubung sepenuhnya, tidak termasuk baling-baling. Pelajaran 6 mencakup pengaturan dan pengujian pemancar, perangkat lunak pengontrol penerbangan, pemeriksaan pra-penerbangan, dan penerbangan pertama.







