목차
서론
5과에서는 프로펠러를 설치하지 않고 드론 조립을 마쳐야 했다. 작은 실수라도 충돌로 이어질 수 있으므로 시간을 들여야 합니다. 첫 비행까지 아직 몇 단계가 남아 있으므로 인내심을 갖고 아래 지침을 따르십시오. 이전 수업에서와 같이 무선 제어 장비를 사용하여 UAV와 상호 작용한다고 계속 가정합니다(현재 가장 널리 사용되는 제어 방법).
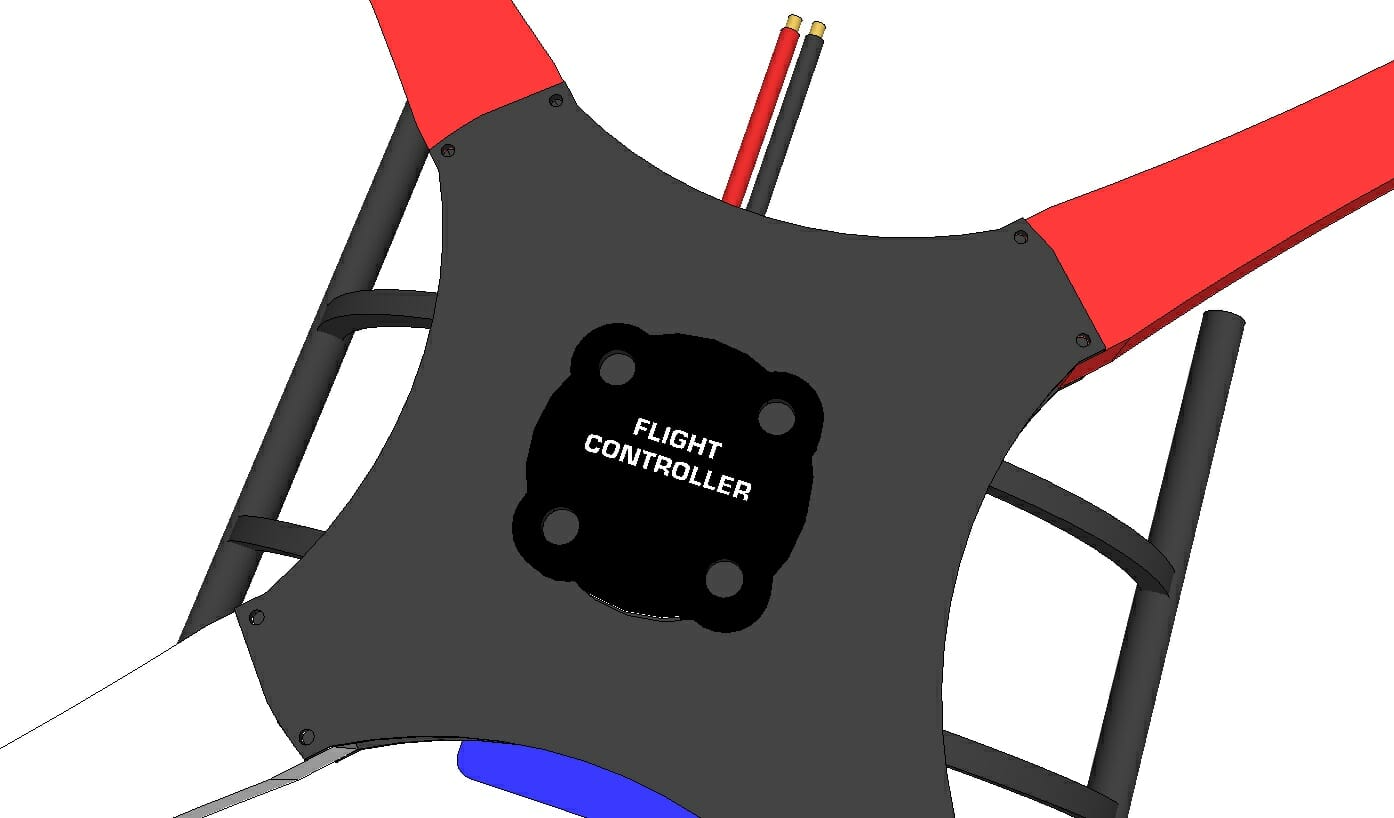
비행 컨트롤러
- 모든 비행 컨트롤러가 동일한 것은 아니므로 설정 절차는 실제로 선택한 모델에 따라 다릅니다. 아직 읽지 않았다면 시간을 내어 선택한 비행 컨트롤러의 사용 설명서를 처음부터 끝까지 철저히 읽으십시오. 가장 작은 세부 사항을 생략하면 첫 번째 성공적인 비행과 완전한 상쇄 사이의 차이를 만들 수 있습니다. 잘 작성된 사용자 매뉴얼에는 이 페이지에서 찾을 수 있는 모든 것과 그 이상이 포함되어야 하므로 이 튜토리얼을 기본 개발자 지침에 대한 대체/대안이 아닌 체크리스트로 사용하는 것이 좋습니다.
- 대부분의 비행 컨트롤러는 PID 값에 대한 전체 제어를 포함하여 특정 UAV 구성에 대한 설정을 선택하기 위한 단계별 절차를 제공합니다. 각각의 값(P, I 및 D)은 특정 프레임과 비행 스타일에 맞게 조정할 수 있습니다. 항공 사진에서 플랫폼을 사용하기 위한 보다 안정적인 것부터 스포츠 비행과 더 유사한 것(재주 넘기, 드론 경주 등)에 이르기까지. 일반적으로 각 필드의 기본값으로 시작하며, 변경할 경험이 충분하지 않은 경우 첫 비행까지 모든 것을 그대로 두는 것이 좋습니다.
- 비행 컨트롤러 매뉴얼에는 동력 장치의 최소 RPM을 설정하는 방법, 즉 모터가 로드될 때 모터가 회전하는 속도를 설정하는 방법도 나와 있어야 합니다. 처음에는 이 값을 상대적으로 낮게 설정할 수 있습니다. 엔진이 회전하는 것을 볼 수 있을 정도로만 충분하지만 UAV가 생성하는 추력에 의해 움직일 정도는 아닙니다. 이 값을 설정할 수 있는 경우 최대 추력은 제어 장치의 스로틀 스틱이 제공할 수 있는 최대 값과 일치해야 합니다.
- 비행 컨트롤러의 사용 설명서에서 제안 없이 논의할 수 있는 한 측면은 비행 모드입니다. 수업 4 로 돌아가서 "비행 모드"는 드론을 안정화하는 데 사용되는 센서와 기능/목적을 결정합니다. 비행 컨트롤러에서 볼 수 있는 가장 일반적인 센서는 자이로스코프, 가속도계, 기압계, 나침반 및 GPS입니다.
- 드론을 처음 사용하는 경우 드론을 안정화하는 데 사용할 수 있는 가장 많은 센서를 사용하는 가장 안정적인 비행 모드를 비행 컨트롤러에서 사용할 수 있도록 하는 것이 좋습니다. 일반적으로 이것은 PID 컨트롤러 설정이 프레임/설정에서 너무 멀리 떨어져 있을 수 있기 때문에 기본 PID 컨트롤러 값을 선택하는 것이 가장 좋습니다. 이전에 비행한 적이 있다면 ACRO 모드(자이로스코프만 사용)가 최고일 수 있습니다.
- 대부분의 비행 컨트롤러는 백업 채널을 통해 비행 중 "비행 모드"를 변경할 수도 있습니다. 예를 들어 리모콘에 6개의 채널이 있는 경우 드론을 비행하는 동안 비행 모드를 변경할 수 있도록 채널 5 또는 6(종종 스위치와 연결됨)을 할당하는 것을 고려할 수 있습니다. 비행하기 전에 어떤 스위치 위치가 어떤 비행 모드에 해당하는지 확인하십시오.
- UAV가 잘 조정되었다고 확신할 때까지 GPS 핫스팟 비행 또는 더 정교한 기능/센서(예: 지면까지의 거리를 결정하기 위한 초음파 거리 센서)를 사용하는 것을 강력히 권장하지 않습니다. 일부 매뉴얼에서는 ACRO(곡예) 모드만 사용하도록 권장하지만, 상당한 비행 경험이 없는 경우 이 모드로 비행하는 것이 물리적으로 불가능하며 안정화가 제외되어 제어하기 가장 어려운 모드입니다.
제어 장비의 구성
- 비행기, 헬리콥터, 자동차 등과 같은 일부 콘솔은 작동 모드가 다릅니다. 4 (섹션: 제어)에서 우리는 일반적으로 항공기 또는 헬리콥터와 관련된 값인 Throttle, Yaw, Pitch 및 Roll의 4가지 주요 제어 채널에 대해 논의했습니다. 비행 컨트롤러 설명서에 송신기에 대한 특정 모드가 지정되어 있지 않은 경우 비행기 모드를 사용하는 것이 좋습니다.
- 리모컨에는 모드 1(모드 1)과 모드 2(모드 2)의 두 가지 유형이 있습니다. 이 유형의 컨트롤을 사용하는 모드 2(가장 일반적)는 왼쪽 채널/스틱/조이스틱과 관련된 스로틀 및 요, 오른쪽과 관련된 피치 및 롤입니다. 값이 반전되지 않았는지 확인하기 위해 막대기를 직접 움직여 할당을 다시 확인할 수도 있습니다.
- 송신기 모드는 종종 채널/신호 "오프셋" 레벨을 추가하여 움직임을 특정 시스템에 더 적합하게 만들지만 대부분의 비행 컨트롤러는 오프셋에 관심을 둡니다. 따라서 "원시" 값을 선호합니다.송신기에 모드가 없는 경우 어떤 채널/스틱/조이스틱이 어떤 모드를 담당하는지 확인하십시오.
- 범용 RC 송신기는 각 채널에서 제한된 범위의 신호만 제공할 수 있으므로 이 단원에서는 RC 송신기가 제공할 수 있는 값의 범위와 최소 및 최대값을 조정할 수 있습니다(또는 값 또는 기본 범위의 백분율로). 예를 들어 MultiWii 기반 비행 컨트롤러는 500ms ~ 2500ms의 전체 펄스 범위를 제공할 수 있는 송신기가 필요하지만 기본 설정은 R/C 항공기의 일반적인 구성이므로 1000ms ~ 2000ms만 가능합니다. 신호 끝점/범위(해당되는 경우)를 설정하는 방법에 대해서는 트랜스미터 설명서를 읽으십시오.
- 컨트롤러에 LCD 디스플레이가 있는 경우 "설정" 아래의 인터페이스를 통해 종종 이를 수행할 수 있습니다.
- “최대 제어 장비 테스트. 거리 "는 친구/조수의 도움으로 구현하거나 RC 드론에 버저 또는 기타 시각적/가청 피드백을 연결하는 것이 가장 쉽습니다. 일부 고급 모델에는 범위 테스트 기능이 있습니다. 테스트의 목표는 수신기가 더 이상 신호를 수신할 수 없을 때까지 신호가 얼마나 멀리 이동하는지 확인하는 것입니다. 소위 "전투 비행"(전투 비행-드론은 조종사-드론의 시야 내에서 짧은 거리에서 성능을 테스트함) 후에만 범위 테스트를 사용하는 것이 좋습니다. 범위 테스트 절차:
- 제어 장비를 켠 다음 기체를 켭니다.
- 15미터 뒤로 물러나서 부저와 관련된 스위치를 작동시킨다. 그의 말을 들어야 합니다.
- 부저가 울리지 않으면 기체를 켜고 엔진이 작동하는지 확인합니다.
- 부저를 무음으로 설정하거나 드론을 재장전합니다.
- 드론이 입력에 응답할 때까지 이 단계를 계속해서 반복합니다(시선).
- 드론을 날릴 수 있는 절대 최대 거리입니다.
- 당신은 그것을 멀리 날릴 계획이 없다고 생각할 수도 있지만, 드론이 3개의 축으로 움직이고 있고 뭔가 잘못될 수 있다는 것을 기억하십시오.
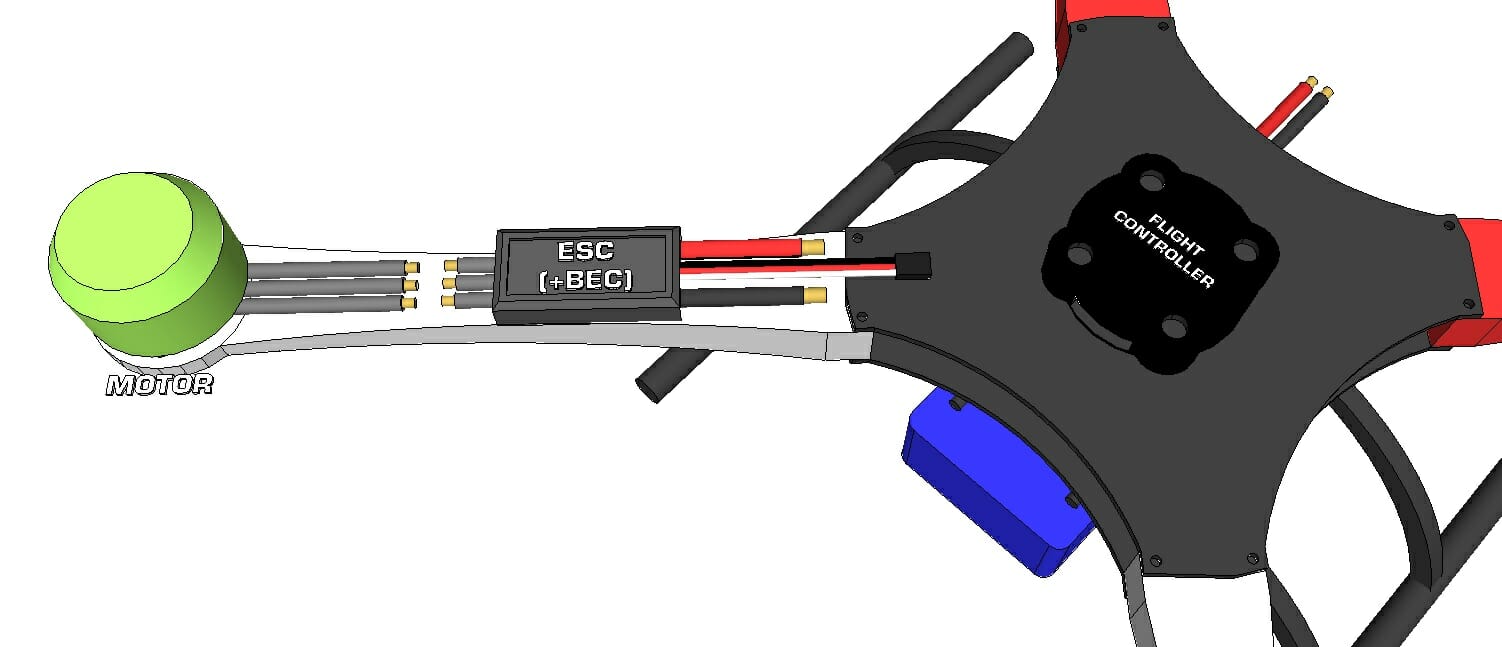
ESC 보정
ESC는 기본적으로 작동하지만 최소 및 최대 스로틀과 관련된 신호(PWM/PWM)가 제공하는 것과 일치하지 않을 수 있습니다. 당신의 송신기. 따라서 필요한 값으로 각 ESC를 "훈련"해야 합니다. 프로펠러가 모터에 장착되어 있지 않은지 확인하십시오. 비행 컨트롤러의 사용 설명서를 참조하십시오. 재프로그래밍 후 ESC는 전원이 공급되지 않는 경우에도 현재 구성을 유지합니다. 따라서 각 ESC는 초기 테스트/설정 중에 한 번만 프로그래밍됩니다.
일반적으로 비행 컨트롤러 설명서에는 ESC를 보정하는 방법과 수행하는 방법을 설명하는 섹션이 있습니다. 그렇지 않은 경우 아래 제안된 방법 중 하나를 시도할 수 있습니다.다시 한 번, 아직 프로펠러를 제거하지 않았다면 제거할 때입니다.
송신기
- 하나의 ESC를 수신기의 "Throttle" 핀에 연결합니다. ESC에 BEC가 연결되어 있지 않으면 BEC 지원 ESC를 수신기의 다른 핀(예: 배터리 입력)에 연결하여 수신기에 전원을 공급할 수 있습니다.
- ESC를 적절한 모터에 연결합니다(아직 연결되지 않은 경우).
- "스로틀"과 관련된 스틱/조이스틱을 최대로 설정(보통 왼쪽 스틱/조이스틱 및 완전 앞으로/위)한 다음 송신기를 켭니다.
- LiPo 배터리를 배전반에 연결하거나 이 ESC에 직접 연결합니다(커넥터가 호환되는 경우).
- 엔진에서 삐 소리가 세 번(11.1V LiPo) 나고 잠시 멈춘 다음 짧은 삐(최대 신호음)가 두 번 울립니다.
- 짧은 경고음이 울리면 즉시 스로틀 스틱/조이스틱을 가장 낮은 위치(최소 경고음)로 이동합니다.
- 엔진에서 신호음이 세 번(11.1V LiPo) 울린 다음 긴 신호음이 울려야 합니다.
- 이 ESC의 스로틀 범위가 이제 설정되었습니다. 모든 ESC가 보정될 때까지 다음 범위로 이동합니다.
기타 방법
제품 사용 설명서의 지침에 따라 ESC의 최소/최대 입력 범위를 송신기에서 수신할 ESC의 입력 범위와 일치시킵니다.
- USB: 일부 ESC 모델은 USB를 통해 독립적으로 또는 어댑터와 함께 프로그래밍할 수 있습니다.
- 프로그래밍 보드: 외부 ESC 프로그래밍 보드는 거의 모든 ESC와 함께 사용할 수 있으며 독립형 장치입니다.
- 마이크로컨트롤러: 이 방법은 널리 사용되지는 않지만 올바른 코드가 있고 올바르게 연결할 수 있는 경우 마이크로컨트롤러로 ESC를 다시 프로그래밍하는 것은 확실히 가능합니다.
- 비행 컨트롤러: 일부 비행 컨트롤러를 사용하면 프로그래밍 인터페이스를 통해 ESC를 보정하거나 프로그래밍할 수 있습니다. 이것이 가능한지 확인하려면 비행 컨트롤러의 지침을 읽으십시오.
모터와 메인 로터(프로펠러). 방향.
이제 프로펠러를 설치할 준비가 되었습니다. 추력을 생성하기 위한 메인 로터의 방향을 논의하는 3 Lesson 으로 돌아가 보겠습니다. 모든 프로펠러에는 상단과 하단이 있으며 CW(시계 방향) 및 CCW(반시계 방향) 회전 방향이 있습니다. 일반적으로 소품의 상단에는 높이와 지름을 나타내는 텍스트가 있습니다. 프로펠러가 모터 샤프트에 장착되면 모터가 드론 빔의 상단에 장착되거나 드론의 하단에 장착되는지 여부에 관계없이 이 위쪽 부분이 하늘을 향하게 됩니다.

파일럿 비행 전 체크리스트
드론이 실제 상업용 항공기만큼 복잡하거나 위험하지는 않지만 조종사로서 그리고 다가오는 비행이 사람이나 재산을 위험에 빠뜨리지 않도록 하기 위해 비행 전 체크리스트가 있어야 합니다. 아래 목록은 필수 사항만 다루며 각 비행 전에 수행해야 합니다(첫 비행 전뿐만 아니라).
- 드론의 어느 쪽이 앞쪽에 있는지 알 수 있는 시각 보조 장치가 있는지 확인하십시오. 최소한 두 개의 전면 빔에 컬러 테이프를 추가하십시오.
- 제어장치의 배터리가 충전되어 있는지 확인한다.
- UAV를 가볍게 흔드십시오. 느슨해지거나 덜거덕거리거나 땅에 떨어지지 않아야 합니다. 이전 비행에 대한 경착륙의 결과로 무엇이 옮겨졌거나 부러졌는지 결코 알 수 없습니다.
- 프로펠러가 여전히 단단히 부착되어 있는지 확인하십시오.
- 먼저 제어 장비를 켠 다음 드론에 전원을 켭니다(손을 로터에서 멀리 유지).
- 모터를 안정적으로 준비하고 다시 준비할 수 있는지 확인하십시오("Arm"일 때 낮은 RPM으로 회전하고 "Disarm"일 때 회전을 중지해야 함)
- 보정하거나 센서가 양호한지 확인하십시오 보정됨(정기적으로 수행해야 함)
- 트랜스미터 범위를 확인합니다.
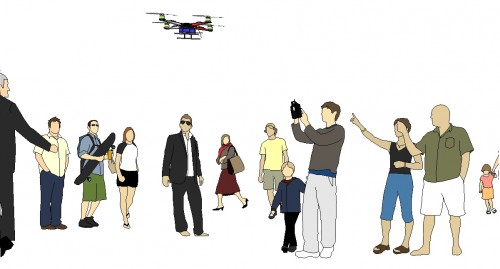
- 비행 구역이 완전히 비어 있는지 확인하고 그 안에 사람이 있으면 특히 호기심 많은 어린이에게 알리십시오. UAV를 조종하고 있으며 모터가 완전히 멈춘 상태에서 드론이 착륙할 때까지 접근해서는 안 됩니다.

테스트
조종사 및 드론 설계자로서의 능력에 대한 충분한 자신감을 얻을 때까지 다음 절차는 첫 비행 전에 모든 사람에게 무인 항공기를 제안했습니다.
- 엔진을 켜고 비행 컨트롤러 설명서에 설명된 대로 엔진이 올바른 방향으로 회전하는지 확인합니다.
- 스로틀 스틱/조이스틱을 매우 천천히 올리고 프로펠러가 공기를 지면을 향해 아래로 밀어내고 있는지 확인합니다. 티슈 페이퍼를 사용하는 것은 육안 검사를 위한 안전한 옵션입니다.
- 피치 스틱/조이스틱을 매우 조심스럽게 앞/뒤로 움직여 드론이 앞/뒤로 올바르게 기울어졌는지 확인합니다.
- 드론이 올바르게 반응하는지 확인하기 위해 롤 스틱/조이스틱을 양쪽으로 매우 조심스럽게 움직입니다.
드론이 제대로 작동하지 않는 경우 여러 가지 가능한 이유가 있으며 그 중 가장 일반적인 것은 다음과 같습니다.
- 하나 이상의 모터가 잘못된 방향으로 회전하고 있습니다.
- 비행 컨트롤러가 올바르게 설치되지 않았고 "앞으로"로 간주되는 것이 실제 UAV와 다릅니다.
- 수신기와 비행 컨트롤러 사이의 하나 이상의 접점이 올바르게 연결되지 않았거나 잘못된 위치에 있습니다.
- 사용자 입력에 응답하기에는 너무 빠르거나 너무 갑작스럽게 모든 것이 올바르게 설정되었을 수 있습니다.
비상 계획
이제 막 현장 및/또는 새 드론으로 작업을 시작합니다. 아래 목록은 야심 찬 조종사에게 응답하는 방법과 이유에 대해 생각할 사항과 몇 가지 아이디어를 제공하기 위한 것입니다. 결정은 사례별로 이루어지며 일부 상황에서는 여기에 제안된 내용과 모순될 수 있습니다. 그러니 자신을 알고, 주변 환경을 파악하고, 조심하세요! 거의 모든 경우에 사람이나 재산과 충돌할 위험을 감수하는 것보다 드론을 잃어버리는 것이 더 나을 것입니다.
드론이 너무 멀어서 어느 방향인지 모른다.
- 스로틀을 줄이고 드론이 응답하는지 관찰합니다(연결이 있는지 확인).
- 드론이 기체에 반응하면 바로 그 자리에 착륙해 보세요(가능하면).
- 이 위치가 착륙에 적합하지 않은 경우 드론을 전방으로 향하게 조심스럽게 시도하고(급격하지 않음) 드론이 위치에 의존하여 반응하면 하늘에서 왼쪽 또는 오른쪽으로 이동하여 결정할 수 있습니다. 그것의 방향. 왼쪽이나 오른쪽으로 움직이지 않는 것 같으면 당신을 향해 움직이거나 멀어지는 것일 수 있으므로 방금 한 작업을 취소하고 왼쪽으로 수색해 보세요.
드론이 갑자기 (이유가 있든 없든) 코스에서 급격하게 방향을 틀었습니다.
- 조종에 능숙하지 않은 경우(복구하려고) 스로틀을 완전히 버리고 떨어뜨리십시오. 이 경우 과격한 조치를 고려하면 시력을 잃을 수 있습니다. 또는 더 심하게는 드론이 더 먼 거리에서 오르기 시작합니다.
드론이 사람을 향해 빠르게 움직이고 있다.
- 기체가 최대로 올라가서 고도를 높이고 그 위로 날아간다. 당신의 드론은 여전히 올바른 일반적인 방향에 있을 것이므로 사람들에게 날아가는 것보다 드론을 잃는 것이 낫습니다.
- 최적 고도에 도달한 후 제어를 다시 시도한 다음 명확한 착륙 영역 위에 위치하도록 위치를 조정합니다.
드론이 당신을 향해 빠르게 움직이고 있습니다.
- 가스를 0으로; 그가 당신의 머리에 날아가는 것보다 땅을 치게하십시오.
드론이 관제장비의 입력에 반응하지 않는다.
- 그럴 땐 어쩔 수 없다. 드론이 아직 공중에 있다면 조종기 배터리가 고갈될 수 있습니다.
드론이 프로펠러를 잃는다.
- 프로펠러의 손실은 추력과 편요각 모두에 영향을 미칩니다. 먼저 편요각을 곧게 펴고(극단적인 위치에서 편요각에 연결된 스틱/조이스틱을 잡고 있어야 함) 동시에 스로틀/스로틀 스틱을 조심스럽게 움직여 충돌을 방지한 다음 스로틀을 내립니다..
첫 비행
이전 비행 경험과 상관없이 첫 비행, 특히 맞춤형 다중 엔진 UAV를 사용한 첫 비행은 최대한 신중해야 합니다. 첫 번째 비행의 목적은 모든 것이 올바르게 설정되었는지 확인하는 것입니다. 심각한 문제를 식별할 뿐만 아니라.
- 위치: 건물, 사람 및 재산에서 떨어진 열린 공간. 예: 빈 축구장, 야구장 등이 이상적입니다. 바람이 전혀 없어야 합니다.
- 조종사의 비행 전 체크리스트를 살펴보십시오.
- 드론의 전면이 내 쪽을 향하도록 드론과 약 2m 거리를 두고 선다.
- 모터를 준비합니다.
- 스로틀 스틱/조이스틱을 부드럽게 위로 움직입니다. 드론이 이륙할 준비가 된 지점에 도달합니다. 드론이 약간 튕기는 지면 효과가 있을 수 있지만 걱정하지 마십시오.
- 스로틀을 추가하여 드론을 지면에서 떨어뜨리고 컨트롤에 익숙해지십시오. 특정 반경 내에서 드론을 유지하고 스틱/조이스틱 움직임에 어떻게 반응하는지 확인하십시오.
- 작고 점진적이며 유동적인 움직임을 만드십시오. 너무 갑작스러운 것은 아닙니다. 사고를 방지하기 위해 스로틀 스틱을 내립니다.
- 드론이 예상대로 작동하지 않는 경우(예: "피치" 축을 이동하면 피치가 되고 왼쪽이나 오른쪽으로 롤링됨) 문제가 있는 것이며 확인 된 문제의 원인...
- 드론이 예상대로 행동한다면, 당신의 임무는 지면에서 1.2~2미터 높이에서 그 위치를 꾸준히 유지하는 것입니다. 너무 빨리 화내지 마세요.


.추가 비행
이제 글리치 및 비행을 해결했으므로 통제된 환경에서 편안하게 두 번째 비행을 진행할 수 있습니다.
- 드론은 아직 완전히 테스트되지 않았기 때문에 첫 비행에 대해 전체 비행 전 절차를 거치는 것이 좋으며 오래 걸리지 않을 것입니다.
- 부드러운 움직임을 사용하여 드론이 안전한 거리를 유지하여 스틱/스틱 움직임에 반응하는 방식에 익숙해집니다.
- 드론 조종에 대한 적응은 FPV와 각종 센서의 도움 없이 이루어져야 한다.







