Kandungan
- drone DIY: Pelajaran 1. Terminologi.
- Drone buat sendiri: Pelajaran 2. Bingkai.
- drone buatan sendiri: Pelajaran 3. Loji janakuasa.
- drone buatan sendiri: Pelajaran 4. Pengawal penerbangan.
- Drone do-it-yourself: Pelajaran 5. Perhimpunan.
- Drone buat sendiri: Pelajaran 6. Pemeriksaan prestasi.
- Drone buat sendiri: Pelajaran 7. FPV dan jarak.
- Drone dengan tangan anda sendiri: Pelajaran 8. Kapal terbang.
Pengenalan
Dalam Pelajaran 5, anda harus menyelesaikan pemasangan drone (tanpa memasang baling-baling). Luangkan masa anda, kerana kesalahan kecil pun boleh menyebabkan kemalangan. Anda masih mempunyai beberapa langkah sebelum penerbangan pertama anda, jadi bersabarlah dan ikuti panduan di bawah. Seperti pelajaran sebelumnya, kami akan terus menganggap bahawa anda menggunakan peralatan kawalan radio untuk berinteraksi dengan UAV (sebagai kaedah kawalan yang paling banyak digunakan pada masa ini).
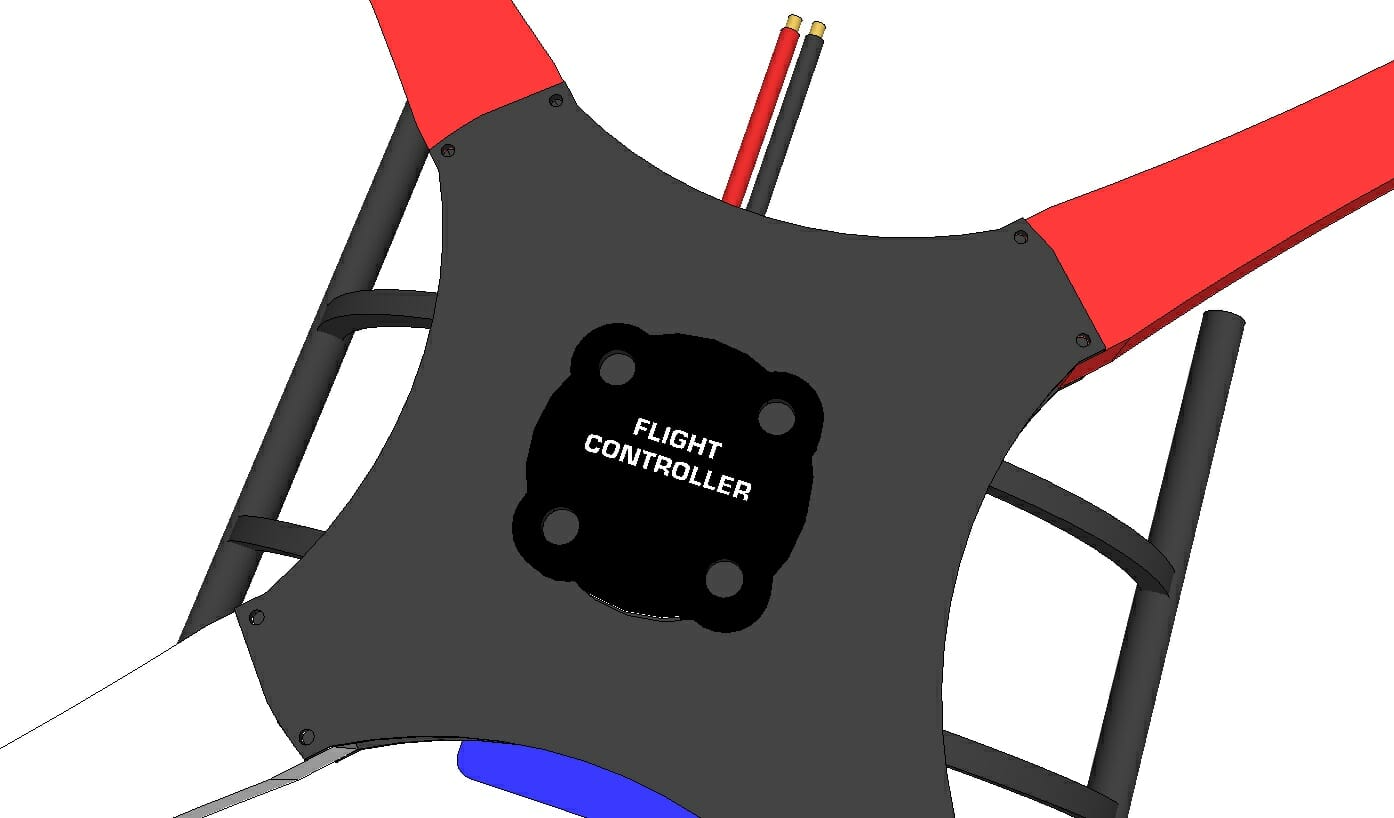
Pengawal Penerbangan
- Tidak semua pengawal penerbangan sama, jadi prosedur penyediaannya sangat bergantung pada model yang anda pilih. Sekiranya anda belum melakukannya, luangkan masa untuk membaca manual pengguna pengawal penerbangan yang dipilih dari awal hingga akhir. Menghilangkan detail terkecil dapat membuat perbezaan antara penerbangan pertama yang berjaya dan penghapusan lengkap. Manual pengguna yang ditulis dengan baik harus merangkumi semua yang anda dapati di halaman ini dan banyak lagi, jadi disarankan agar anda menggunakan tutorial ini sebagai senarai semak dan bukan sebagai pengganti / alternatif kepada petunjuk asas pembangun.
- Sebilangan besar pengendali penerbangan menyediakan prosedur langkah demi langkah untuk memilih pengaturan untuk konfigurasi UAV tertentu, termasuk kontrol penuh atas nilai PID. Nilai untuk masing-masing (P, I dan D) dapat disesuaikan untuk kerangka dan gaya terbang khusus anda; dari sesuatu yang lebih stabil untuk menggunakan platform dalam fotografi udara, hingga sesuatu yang lebih mirip dengan penerbangan sukan (melakukan jungkir balik, perlumbaan drone, dll.). Biasanya dimulakan dengan nilai lalai untuk setiap bidang, dan jika anda tidak memiliki cukup pengalaman untuk mengubahnya, disarankan untuk meninggalkan semuanya seperti yang pertama hingga penerbangan pertama.
- Manual pengendali penerbangan juga harus menunjukkan cara menetapkan RPM minimum dari powerplant, yaitu, mengatur kecepatan putaran motor ketika mereka dimuat. Pada mulanya, anda boleh menetapkan nilai ini secara relatif rendah - cukup untuk melihat mesin berputar, tetapi tidak begitu banyak sehingga UAV digerakkan oleh daya tarikan yang dihasilkannya. Dorong maksimum, jika anda dapat menetapkan nilai ini, harus sesuai dengan nilai maksimum yang dapat diberikan oleh batang pendorong pada alat kawalan anda.
- Salah satu aspek yang mungkin dibincangkan dalam manual pengguna pengendali penerbangan tanpa membuat cadangan adalah mod penerbangan. Kembali ke Pelajaran 4, "Flight Mode" menentukan sensor mana yang digunakan untuk menstabilkan drone, serta fungsi / tujuannya. Sensor yang paling biasa terdapat pada alat kawalan penerbangan adalah giroskop, akselerometer, barometer, kompas, dan mungkin GPS.
- Jika ini adalah drone pertama anda, sangat disarankan agar mod penerbangan paling stabil tersedia untuk pengawal penerbangan anda, yang menggunakan sensor yang tersedia untuk menstabilkan drone tersebut. Secara umum, ini kerana tetapan pengawal PID mungkin terlalu jauh dari kerangka / tetapan anda, sebab itulah lebih baik memilih nilai pengawal PID lalai. Sekiranya anda pernah terbang sebelumnya, mod ACRO (yang hanya menggunakan giroskop) mungkin yang terbaik.
- Sebagian besar pengendali penerbangan juga akan memungkinkan Anda mengubah "mode penerbangan" dalam penerbangan melalui saluran sandaran. Sebagai contoh, jika alat kawalan jauh anda mempunyai enam saluran, anda mungkin mempertimbangkan untuk menetapkan saluran 5 atau 6 (yang sering dikaitkan dengan suis) supaya anda dapat mengubah mod penerbangan semasa terbang dengan drone. Sebelum terbang, pastikan anda mengetahui kedudukan suis mana yang sesuai dengan mod penerbangan mana.
- Sangat tidak digalakkan menggunakan penerbangan hotspot GPS atau fungsi / sensor yang lebih canggih (misalnya, sensor jarak ultrasonik untuk menentukan jarak ke tanah) sehingga anda yakin bahawa UAV disetel dengan baik. Beberapa manual mencadangkan hanya menggunakan mod ACRO (akrobatik), namun, jika anda tidak mempunyai pengalaman terbang yang signifikan, terbang dalam mod ini tidak mungkin secara fizikal bagi anda, mod ini adalah yang paling sukar dikendalikan, kerana penstabilan tidak termasuk.
Konfigurasi peralatan kawalan
- Beberapa konsol mempunyai mod operasi yang berbeza, seperti Pesawat, Helikopter, Kereta dll. Dalam 4 (Bahagian: Kawalan) kita membincangkan empat saluran kawalan utama: Throttle, Yaw, Pitch and Roll, yang biasanya merupakan nilai yang berkaitan dengan pesawat atau helikopter. Sekiranya manual pengendali penerbangan tidak menentukan mod tertentu untuk pemancar, disarankan untuk menggunakan mod Pesawat.
- Ada dua jenis alat kawalan jauh: Mode 1 (Mode 1) dan Mode 2 (Mode 2). Mod 2 (paling biasa) dengan jenis kawalan ini ialah Throttle and Yaw yang berkaitan dengan saluran kiri / tongkat / kayu bedik, Pitch and Roll dengan kanan. Anda juga boleh memeriksa semula tugas mereka dengan menggerakkan tongkat secara langsung untuk memastikan nilainya tidak terbalik.
- Mod pemancar sering menambahkan tahap “offset” saluran / isyarat untuk membuat pergerakan lebih sesuai untuk sistem tertentu, namun kebanyakan pengawal penerbangan peduli dengan sebarang pengimbangan dan, dengan demikian, lebih suka nilai "mentah". Sekiranya pemancar anda tidak mempunyai mod apa-apa, periksa saluran / tongkat / kayu bedik mana yang bertanggungjawab.
- Pemancar RC tujuan umum hanya dapat memberikan jarak isyarat yang terhad pada setiap saluran, dan oleh itu dalam pelajaran ini kami menasihati anda untuk mengetahui julat nilai yang dapat diberikan oleh pemancar RC dan apakah minimum dan nilai maksimum dapat disesuaikan (atau sebagai nilai atau sebagai peratusan dari julat lalai). Sebagai contoh, pengawal penerbangan berasaskan MultiWii memerlukan pemancar yang dapat menyediakan pelbagai denyutan dari 500ms hingga 2500ms, sementara pengaturan lalai hanya boleh 1000ms hingga 2000ms kerana ini adalah konfigurasi biasa untuk pesawat R / C. Baca manual pemancar anda untuk cara menetapkan titik / jarak akhir isyarat (jika ada).
- Jika pengawal anda mempunyai paparan LCD, anda sering dapat melakukannya melalui antara muka di bawah "Tetapan".
- "Uji peralatan kawalan pada maks. Jarak ”paling mudah dilaksanakan dengan bantuan rakan / pembantu, atau sambungkan bel atau maklum balas visual / pendengaran lain ke drone RC. Beberapa model akhir yang lebih tinggi mempunyai fungsi ujian jarak jauh. Matlamat ujian ini adalah untuk melihat sejauh mana isyarat bergerak sebelum penerima tidak dapat mengambilnya lagi. Dianjurkan untuk menggunakan uji jarak hanya setelah apa yang disebut "Fight flight" (Fight flight - drone diuji untuk prestasi pada jarak dekat, dalam jarak pandang pilot-drone). Prosedur Ujian Julat:
- Hidupkan peralatan kawalan, kemudian pesawat.
- Mundur sejauh 15 meter dan aktifkan suis yang berkaitan dengan bel; Anda mesti mendengarnya.
- Jika anda tidak mempunyai bel, hidupkan pesawat dan pastikan enjinnya berjalan.
- Diamkan bel / tekan semula drone
- Ulangi langkah ini lebih jauh dan lebih jauh (garis penglihatan) sehingga drone bertindak balas terhadap input anda.
- Ini akan menjadi jarak maksimum mutlak untuk menerbangkan drone anda.
- Anda mungkin menganggap anda tidak berencana untuk terbang sejauh itu, tetapi ingat bahawa drone itu bergerak dalam tiga paksi dan mungkin ada yang salah.
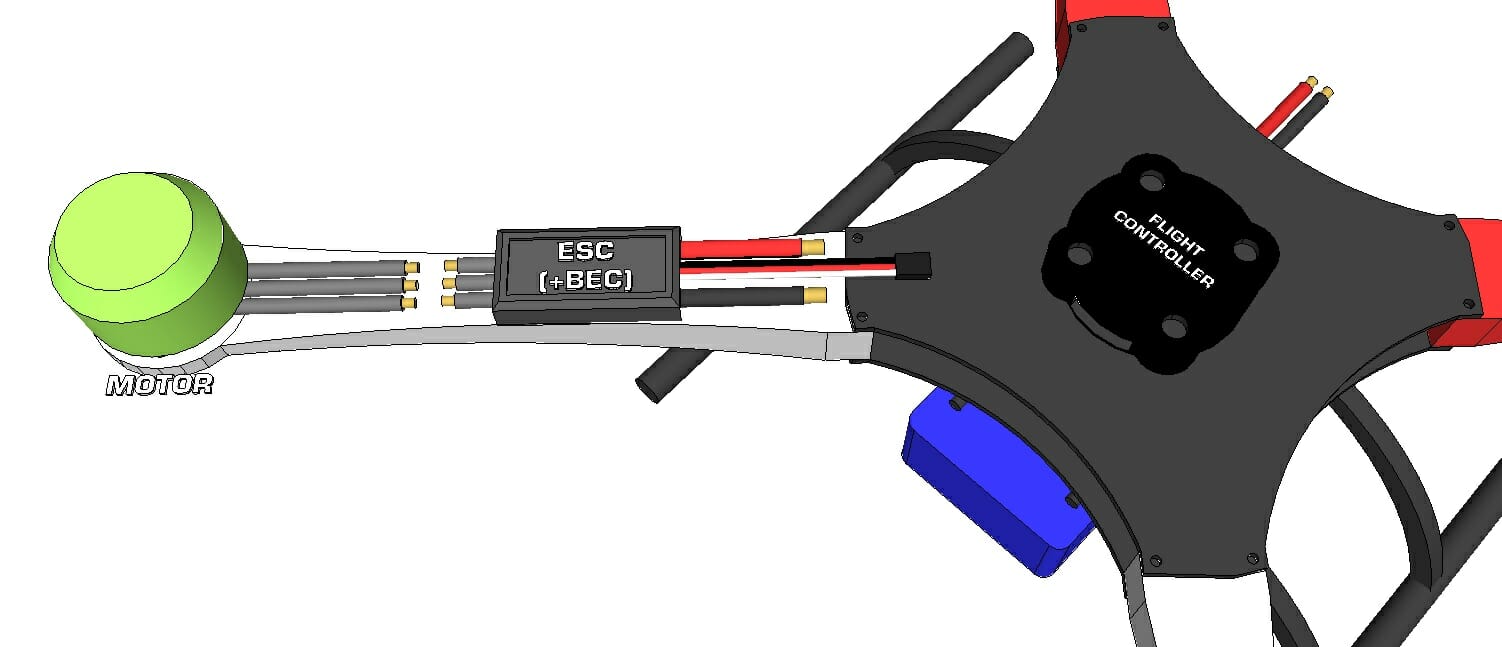
Kalibrasi ESC
ESC akan berfungsi di luar kotak, tetapi isyarat (PWM / PWM) yang berkaitan dengan pendikit minimum dan maksimum mungkin tidak sesuai dengan yang disediakan pemancar anda. Oleh itu, anda perlu "melatih" setiap ESC dengan nilai yang diperlukan. Pastikan baling-baling tidak dipasang pada motor. Rujuk manual pengguna pengawal penerbangan anda. Setelah memprogramkan semula, ESC mengekalkan konfigurasi semasa walaupun tidak dihidupkan. Oleh itu, setiap ESC diprogramkan hanya sekali, semasa ujian / persediaan awal.
Biasanya ada bahagian dalam manual pengendali penerbangan yang menerangkan cara menentukurkan ESC dan menerangkan cara melakukannya. Sekiranya tidak, anda boleh mencuba salah satu kaedah yang disarankan di bawah. Sekali lagi, jika anda belum mengeluarkan baling-baling anda, sudah tiba masanya untuk melakukannya.
Pemancar
- Sambungkan satu ESC ke pin "Throttle" pada penerima anda. Sekiranya ESC anda tidak mempunyai BEC yang disambungkan, anda boleh menyambungkan satu ESC berkemampuan BEC ke pin lain pada penerima (seperti input bateri) hanya untuk membekalkan kuasa ke penerima.
- Sambungkan ESC ke motor yang sesuai (jika belum disambungkan).
- Tetapkan tongkat / kayu bedik yang terkait dengan "Throttle" ke maksimum (biasanya tongkat / tongkat kiri dan depan / atas penuh), kemudian hidupkan pemancar.
- Sambungkan bateri LiPo ke papan pengagihan kuasa atau terus ke ESC ini (jika penyambungnya serasi).
- Mesin harus berbunyi bip tiga kali (11.1V LiPo) diikuti dengan jeda pendek diikuti oleh dua bip pendek (yang merupakan bip maksimum).
- Segera setelah bunyi bip pendek, gerakkan Throttle stick / joystick ke posisi terendah (yang merupakan bip minimum).
- Mesin harus berbunyi bip tiga kali (11.1V LiPo) diikuti dengan bunyi bip panjang.
- Julat pendikit untuk ESC ini sekarang telah ditetapkan, beralih ke yang berikutnya sehingga semua ESC dikalibrasi.
Kaedah lain
Ikuti arahan dalam manual pengguna produk untuk mencocokkan julat minimum / maksimum isyarat input ESC dengan yang akan diterimanya dari pemancar.
- USB: Beberapa model ESC dapat diprogramkan melalui USB, sama ada secara bebas atau dengan penyesuai.
- Papan Pengaturcaraan: Papan Pengaturcaraan ESC Luaran, dapat digunakan dengan hampir semua ESC dan merupakan perangkat yang berdiri sendiri.
- Mikrokontroler: Kaedah ini tidak banyak digunakan, tetapi mungkin untuk memprogram ulang ESC dengan mikrokontroler jika anda mempunyai kod yang betul dan dapat menyambung dengan betul.
- Pengawal Penerbangan: Beberapa pengendali penerbangan membolehkan anda menentukur atau memprogram ESC melalui antara muka pengaturcaraan mereka. Baca arahan untuk pengawal penerbangan anda untuk melihat apakah ini mungkin.
Motor dan pemutar utama (baling-baling). Arah.
Anda kini sudah siap memasang baling-baling. Mari kita kembali ke 3 pelajaran, yang membincangkan arah pemutar utama untuk membuat tujahan. Semua baling-baling mempunyai bahagian atas dan bawah, dan arah putaran CW (mengikut arah jam) dan CCW (berlawanan arah jam). Biasanya terdapat teks di bahagian atas alat peraga yang menunjukkan ketinggian dan diameternya. Apabila baling-baling dipasang pada batang motor, bahagian atas ini menunjuk ke arah langit, tanpa mengira sama ada motor dipasang di bahagian atas balok drone atau di bahagian bawah drone.

Senarai Semak Pra-Penerbangan Juruterbang
Walaupun drone itu tidak begitu kompleks atau berbahaya seperti pesawat komersial sebenar, anda - sebagai juruterbang dan mesti mempunyai senarai semak sebelum penerbangan untuk memastikan bahawa penerbangan yang akan datang tidak membahayakan orang atau harta benda. Senarai di bawah merangkumi hanya perkara-perkara penting dan mesti dilakukan sebelum setiap penerbangan (bukan hanya sebelum yang pertama).
- Pastikan anda mempunyai alat bantu visual yang tersedia untuk mengetahui sisi drone anda di depan. Sekurang-kurangnya, tambahkan pita berwarna ke dua balok depan.
- Pastikan bateri peralatan kawalan terisi.
- Goncangkan UAV dengan ringan - tidak ada yang boleh melonggarkan, berderak, atau jatuh ke tanah. Anda tidak akan tahu apa yang mungkin telah diganti atau pecah akibat pendaratan yang sukar pada penerbangan sebelumnya.
- Pastikan baling-baling masih terpasang dengan selamat.
- Hidupkan peralatan kawalan pertama, kemudian hidupkan drone (jauhkan tangan anda dari rotor).
- Pastikan anda dapat mempersenjatai dan mempersenjatai kembali motor dengan andal (mereka harus berputar pada RPM rendah ketika "Lengan" dan berhenti berputar ketika "Melucutkan senjata")
- Pastikan anda menentukur atau sensornya baik dikalibrasi (anda mesti melakukan ini secara berkala)
- Periksa jarak pemancar.
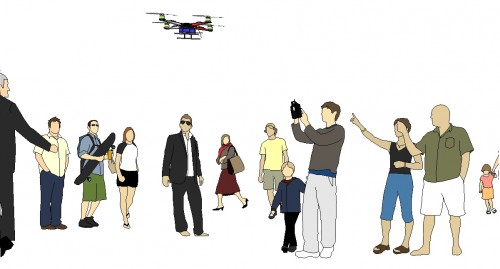
- Pastikan kawasan penerbangan benar-benar jelas dan jika ada orang di dalamnya, beritahu mereka, terutamanya kanak-kanak yang ingin tahu; bahawa anda menerbangkan UAV, dan anda tidak boleh menghampiri sehingga drone itu mendarat dengan motor berhenti sepenuhnya.

Uji
Sehingga anda mendapat keyakinan yang cukup dalam kemampuan anda sebagai juruterbang dan pereka drone, prosedur berikut adalah dicadangkan untuk semua kenderaan udara tanpa pemandu sebelum penerbangan pertama mereka.
- Hidupkan mesin dan pastikan mereka berputar ke arah yang betul seperti yang dijelaskan dalam manual pengendali penerbangan.
- Naikkan batang Throttle / joystick dengan perlahan dan pastikan baling-baling mendorong udara ke bawah ke tanah. Menggunakan kertas tisu adalah pilihan yang selamat untuk pemeriksaan visual.
- Gerakkan batang Pitch / kayu bedik dengan hati-hati ke depan / ke belakang untuk memastikan drone condong ke depan / ke belakang dengan betul.
- Pindahkan Roll stick / joystick dengan berhati-hati ke setiap sisi untuk memastikan drone itu bertindak balas dengan betul.
Jika drone tidak berkelakuan baik, ada banyak kemungkinan sebab, yang paling umum adalah:
- Satu atau lebih motor berputar ke arah yang salah.
- Pengawal penerbangan tidak dipasang dengan betul dan yang dianggapnya "maju" berbeza dengan UAV fizikal anda.
- Satu atau lebih kenalan antara penerima dan pengawal penerbangan tidak tersambung dengan betul atau bahkan di tempat yang salah.
- Mungkin semuanya disusun dengan betul, terlalu cepat atau terlalu tiba-tiba untuk bertindak balas terhadap input pengguna.
Pelan Kecemasan
baru mula bekerja di lapangan dan / atau dengan drone baru. Senarai di bawah ini bertujuan untuk memberi anda perkara yang perlu difikirkan dan beberapa idea mengenai bagaimana, dan mengapa, untuk memberi respons kepada juruterbang yang bercita-cita tinggi. Keputusan itu dibuat berdasarkan kes demi kes, dan dalam beberapa situasi mungkin bertentangan dengan apa yang dicadangkan di sini. Oleh itu, kenali diri anda, kenali persekitaran anda, dan berhati-hati! Dalam hampir semua kes, lebih baik kehilangan drone daripada berisiko bertembung dengan orang atau harta benda.
Drone itu sangat jauh dan anda tidak tahu arah mana.
- Kurangkan pendikit dan perhatikan apakah drone itu bertindak balas (periksa sama ada ada sambungan).
- Jika drone merespon gas, cubalah mendarat di sana (jika boleh).
- Jika lokasi ini tidak sesuai untuk mendarat, berhati-hati cuba mengarahkan drone ke depan (tidak ada yang drastik), dan jika drone itu bertindak balas dengan bergantung pada kedudukan anda, bergerak ke kiri atau kanan di langit akan memungkinkan anda menentukan orientasinya. Sekiranya tidak bergerak ke kiri atau kanan, ia mungkin bergerak ke arah anda atau jauh dari anda, jadi batalkan apa yang baru saja anda lakukan dan cuba menjelajahi kiri.
Drone tiba-tiba bergerak tajam ke arah luar (dengan atau tanpa alasan).
- Jika anda tidak mahir mengemudi (untuk mencuba memulihkannya), buang throttle sepenuhnya dan biarkan jatuh: dalam hal ini, merenungkan tindakan radikal boleh menyebabkan anda kehilangan penglihatan drone atau, lebih buruk lagi, drone akan mula naik untuk jatuh dari jarak yang lebih jauh.
Drone bergerak pantas ke arah orang.
- Gas ke maksimum sehingga ia mencapai ketinggian dan terbang di atasnya; drone anda mungkin masih berada dalam orientasi umum yang betul, jadi lebih baik kehilangan drone daripada terbang ke arah orang.
- Setelah mencapai ketinggian optimum, cobalah untuk mendapatkan kembali kendali, kemudian letakkan sehingga berada di atas kawasan pendaratan yang jelas.
Drone bergerak dengan pantas ke arah anda.
- Gas menjadi sifar; biarkan dia memukul tanah, daripada terbang ke kepalamu.
Drone tidak bertindak balas terhadap input dari peralatan kawalan.
- Dalam kes ini, tidak ada yang dapat anda lakukan. Sekiranya drone anda masih di udara, bateri alat kawalan jauh anda mungkin habis.
Drone kehilangan baling-baling.
- Kehilangan baling-baling mempengaruhi daya tarikan dan menguap; cuba luruskan yaw terlebih dahulu (anda mungkin perlu memegang tongkat / kayu bedik yang disambungkan ke yaw, dalam kedudukan yang melampau), dan kemudian pada masa yang sama gerakkan batang pendikit / pendikit ke atas untuk mengelakkan perlanggaran, kemudian throttle ke bawah.
Penerbangan pertama
Terlepas dari pengalaman terbang sebelumnya, penerbangan pertama anda, terutama dengan UAV multi-enjin tersuai, harus selembut mungkin. Tujuan penerbangan pertama adalah untuk memastikan semuanya disusun dengan betul; serta mengenal pasti masalah serius.
- Lokasi: kawasan terbuka, jauh dari bangunan, orang dan harta benda. Contohnya: padang bola kosong, padang besbol, dan sebagainya akan sesuai. Tidak boleh ada angin sama sekali.
- Lihat senarai semak awalan juruterbang.
- Berdiri kira-kira 2 meter dari drone dengan bahagian depan drone menghadap ke arah anda.
- Lengan motor.
- Gerakkan batang pendikit / kayu bedik ke atas dengan perlahan. Mencapai titik di mana drone siap dilepaskan. Mungkin ada beberapa kesan tanah yang menyebabkan drone melantun sedikit, tetapi jangan risau.
- Tambahkan throttle untuk melepaskan drone dari permukaan tanah dan terbiasa dengan alat kawalan - cuba simpan dalam radius tertentu dan lihat bagaimana ia bertindak balas terhadap pergerakan tongkat / kayu bedik anda.
- Lakukan pergerakan kecil, beransur-ansur dan lancar - tidak terlalu tiba-tiba. Turunkan batang pendikit untuk mengelakkan kemalangan.
- Sekiranya drone anda tidak bersikap seperti yang diharapkan (contohnya, menggerakkan paksi "Pitch" menuju ke nada, serta memutar kiri atau kanan), ada yang tidak kena, dan anda harus mengetahui punca masalah yang dikenal pasti...
- Jika drone berperilaku seperti yang diharapkan, tugas Anda adalah dengan stabil memegang posisinya pada ketinggian 1,2-2 meter dari tanah. Jangan cepat marah.


.Penerbangan tambahan
Sekarang anda telah mengusahakan gangguan dan terbang dengan selesa dalam persekitaran terkawal, anda boleh meneruskan penerbangan kedua.
- Oleh kerana drone masih belum diuji sepenuhnya, kami mencadangkan menjalani prosedur pra-penerbangan penuh untuk penerbangan pertama, yang tidak perlu lama.
- Dengan menggunakan gerakan halus, biasakan bagaimana drone bertindak balas terhadap gerakan tongkat / tongkat anda dengan menjaganya pada jarak yang selamat.
- Penyesuaian untuk mengemudi drone harus dilakukan tanpa bantuan FPV dan pelbagai sensor.







