Inhoud
- DIY-drone: les 1. Terminologie.
- Doe-het-zelf-drone: les 2. Frames.
- Doe-het-zelf-drone: les 3. Energiecentrale.
- Doe-het-zelf-drone: les 4. Vluchtcontroller.
- Doe-het-zelf-drone: les 5. Montage.
- Doe-het-zelf-drone: les 6. Prestatiecontrole.
- Doe-het-zelf-drone: les 7. FPV en afstand.
- Drone met je eigen handen: les 8. Vliegtuigen.
Inleiding
Nu je een frame hebt geselecteerd of gebouwd, is de volgende stap het selecteren van de juiste aandrijflijn. Aangezien de meeste bestaande drones elektrisch zijn, zullen we ons concentreren op het genereren van puur elektrische voortstuwing door borstelloze gelijkstroommotoren. De krachtcentrale omvat motoren, rotoren (propellers, afgekorte props), ESC en een accu.
1. Motor
Welke motoren je in je assemblage gebruikt, hangt af van de maximale belasting die de drone kan tillen, en ook van hoe lang hij kan vliegen. De krachtcentrale moet noodzakelijkerwijs bestaan uit motoren van hetzelfde merk en model, deze aanpak zorgt voor een uitgebalanceerde werking. Opgemerkt moet worden dat zelfs absoluut identieke (merk / model) motoren een klein snelheidsverschil kunnen hebben, dat vervolgens wordt genivelleerd door de vluchtcontroller.
Geborsteld versus borstelloos
Bij geborstelde motoren roteert de gewikkelde rotor in de stator waarop de magneten stevig zijn bevestigd. In borstelloze motoren draait alles; de wikkeling is stevig aan de binnenkant van de stator bevestigd en de magneten zijn op de as gemonteerd en draaien. In de meeste gevallen zult u alleen borstelloze DC-motoren (BC) overwegen. Motoren van dit type worden veel gebruikt in de amateurradio-industrie om producten te assembleren, variërend van helikopters en vliegtuigen tot aandrijfsystemen in auto's en boten.
Borstelloze Pancake-motoren hebben een grotere diameter, zijn platter en hebben over het algemeen een hoog koppel en een lagere KV (details hieronder). Kleine UAV's (meestal ter grootte van een handpalm) gebruiken vaak kleine geborstelde motoren vanwege hun lagere kosten en eenvoudige tweedraadscontroller. Hoewel borstelloze motoren in verschillende maten en specificaties verkrijgbaar zijn, betekent het kiezen van een kleiner formaat niet dat het goedkoper zal zijn.

Inrunner vs Outrunner
Er zijn verschillende soorten borstelloze gelijkstroommotoren:
- Inrunner is een binnenrotor. De wikkeling is bevestigd aan de stator, de magneten zijn gemonteerd op de rotoras, die roteert (meestal gebruikt op RC-boten, helikopters en auto's vanwege de hoge KV).
- Buitenloper - buitenste rotor. De magneten zijn bevestigd aan een stator die rond een stationaire wikkeling draait. De onderkant van de motor is vast.(motoren van dit type hebben in de regel meer koppel).
- Hybride Outrunner is technisch gezien een "Outrunner", maar geïmplementeerd in een "Inrunner"-pakket. Deze benadering maakte het mogelijk om in één type het "Outrunner"-koppel te combineren met de afwezigheid van externe roterende elementen zoals bij motoren van het "Inrunner"-type.
KV
KV-waarde - max. het aantal omwentelingen dat de motor kan ontwikkelen zonder vermogensverlies bij een gegeven spanning. Voor de meeste multi-rotor UAV's is een lage KV-waarde (bijvoorbeeld van 500 tot 1000) relevant, omdat dit helpt om de stabiliteit te waarborgen. Terwijl voor acrobatische vluchten een KV-waarde tussen 1000 en 1500 relevant zal zijn, in combinatie met rotoren met een kleinere diameter (propellers). Laten we zeggen dat de KV-waarde voor een bepaalde motor 650 rpm is, dan zal de motor bij een spanning van 11,1 V draaien met een snelheid van: 11,1 × 650 = 7215 rpm, en als u de motor op een lagere spanning gebruikt (zeg 7,4 V), dan is de rotatiesnelheid: 7,4 × 650 = 4810 rpm. Het is echter belangrijk op te merken dat het gebruik van een lage spanning over het algemeen een hoger stroomverbruik betekent (vermogen = stroom × spanning).
Stuwkracht
Sommige fabrikanten van borstelloze motoren kunnen in de specificatie informatie specificeren over de maximaal mogelijke stuwkracht (stuwkracht) die door de motor wordt gegenereerd in combinatie met de aanbevolen hoofdrotor. De maateenheid voor stuwkracht is meestal kilogram (Kg / Kg), pond (Lbs) of Newton (N). Als u bijvoorbeeld een quadrocopter bouwt en u weet de stuwkrachtwaarde van een enkele motor = tot 0,5 kg in een compartiment met een 11-inch rotor, dan kunnen aan de uitgang vier van dergelijke motoren worden opgetild met maximale stuwkracht: 0,5 kg × 4 = 2kg. Dienovereenkomstig, als het totale gewicht van uw quadcopter iets minder dan 2 kg is, zal deze met een dergelijke krachtcentrale alleen opstijgen bij maximaal toerental (max. stuwkracht). In dit geval is het relevant om ofwel een krachtigere rotormotorbundel te kiezen, die voor meer stuwkracht zal zorgen, ofwel om het totale gewicht van de drone te verminderen. Bij maximaal stuwkracht van de krachtcentrale = 2 kg, het gewicht van de drone mag niet meer dan de helft van deze waarde bedragen (1 kg, inclusief het gewicht van de motoren zelf). Een vergelijkbare berekening kan voor elke configuratie worden gedaan. Stel dat het gewicht van de hexacopter (inclusief frame, motoren, elektronica, accessoires, enz.) 2,5 kg is. Dit betekent dat elke motor voor een dergelijke assemblage (2,5 kg ÷ 6 motoren) × 2 = 0,83 kg stuwkracht (of meer) moet leveren. Nu weet u hoe u de optimale stuwkracht van de motoren kunt berekenen op basis van het totale gewicht, maar voordat u een beslissing neemt, raden we u aan vertrouwd te raken met de onderstaande secties.
Aanvullende overwegingen
- Connectoren: DC-borstelmotoren hebben twee connectoren "" en "-". Door de draden op sommige plaatsen te veranderen, verandert de draairichting van de motor.
- Connectoren: Borstelloze gelijkstroommotoren hebben drie connectoren. Raadpleeg de sectie ESC hieronder om te zien hoe u ze moet aansluiten en hoe u de draairichting kunt wijzigen.
- Wikkelingen: De wikkelingen beïnvloeden de KV van de motoren. Als u de laagste KV-waarde nodig heeft maar prioriteit geeft aan koppel, kunt u het beste uw aandacht richten op de borstelloze gelijkstroommotoren van het Pancake-type.
- Montage: De meeste fabrikanten hebben een algemeen bedradingsschema voor gelijkstroommotoren voor gelijkstroommotoren, waardoor framebedrijven het maken van zogenaamde adapters kunnen vermijden. De sjabloon is meestal metrisch, met twee gaten van 16 mm uit elkaar en nog twee gaten van 19 mm uit elkaar (90 ° ten opzichte van de eerste).
- Schroefdraad: De montageschroefdraad die wordt gebruikt om de borstelloze motor aan het frame te bevestigen, kan variëren. De gebruikelijke metrische maten van schroeven zijn M1, M2 en M3, imperiale maten kunnen 2-56 en 4-40 zijn.
2. Hoofdrotoren (propellers)
Hoofdrotoren (propellers, afgekorte props) voor multi-rotor UAV's zijn afkomstig van de propellers van radiografisch bestuurbare vliegtuigen. Velen zullen zich afvragen: waarom geen helikopterbladen gebruiken? Ook al is dit al gedaan, stel je de afmetingen voor van een hexacopter met helikopterbladen. Het is ook vermeldenswaard dat het helikoptersysteem een verandering in de spoed van de bladen vereist, en dit bemoeilijkt het ontwerp aanzienlijk.
U kunt zich ook afvragen waarom u geen turbostraalmotor, een turbofanmotor, een turboprop, enz. gebruikt? Ze zijn natuurlijk ongelooflijk goed in het leveren van veel stuwkracht, maar ze hebben ook veel energie nodig. Als het de eerste zorg van de drone is om heel snel te bewegen in plaats van te zweven in een beperkte ruimte, kan een van de bovenstaande motoren een goede optie zijn.
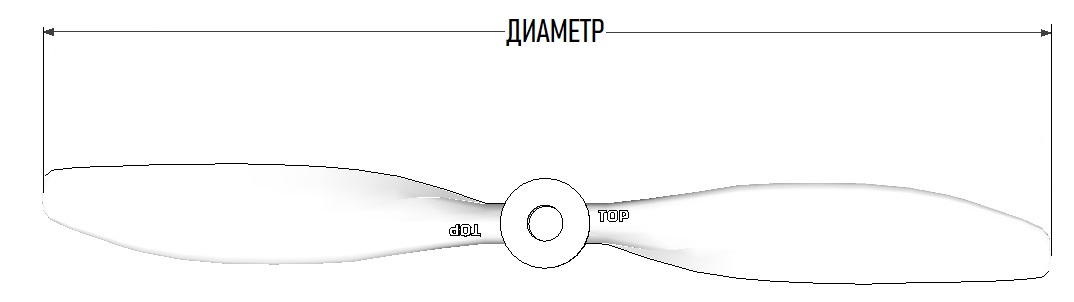
Schoepen en diameter
De hoofdrotor van de meeste UAV's met meerdere rotoren heeft twee of drie bladen. De meest gebruikte propellers zijn met twee bladen. Ga er niet vanuit dat het toevoegen van meer bladen automatisch de stuwkracht zal verhogen; elk blad werkt in de stroom die wordt verstoord door het vorige blad, waardoor de efficiëntie van de propeller wordt verminderd. De hoofdrotor met een kleine diameter heeft minder traagheid en is daarom gemakkelijker te versnellen en te vertragen, wat belangrijk is voor acrobatische vluchten.

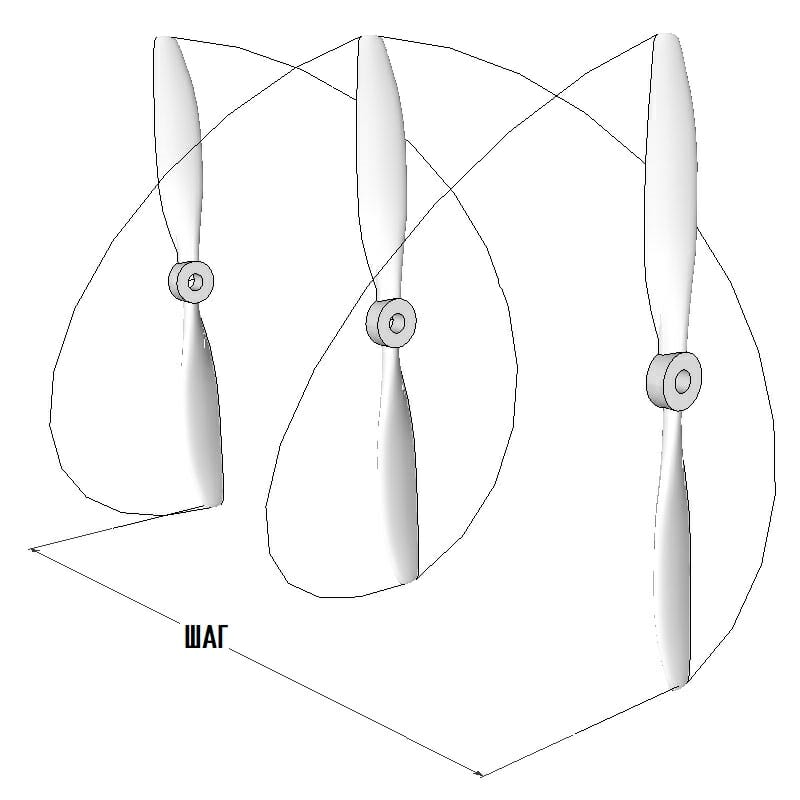
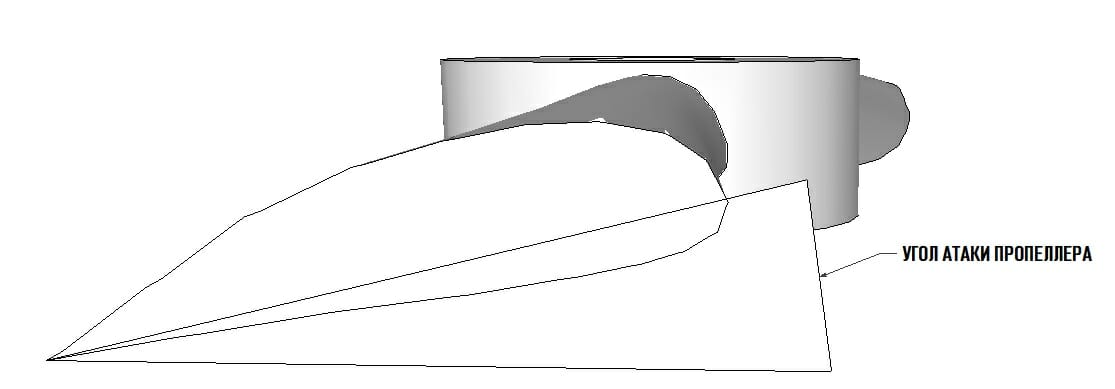
Pitch / aanvalshoek / efficiëntie / stuwkracht
De stuwkracht gegenereerd door de hoofdrotor hangt af van de luchtdichtheid, het aantal omwentelingen van de propeller, de diameter, de vorm en het oppervlak van de bladen, evenals de spoed. Het rendement van een propeller is gerelateerd aan de invalshoek, die wordt gedefinieerd als de spoed van het blad minus de helixhoek (de hoek tussen de resulterende relatieve snelheid en de draairichting van het blad). Efficiëntie zelf is de verhouding tussen uitgangsvermogen en ingangsvermogen. De meeste goed ontworpen propellers zijn meer dan 80% efficiënt. De aanvalshoek wordt beïnvloed door de relatieve snelheid, dus de propeller zal een ander rendement hebben bij verschillende motorsnelheden. De efficiëntie wordt ook sterk beïnvloed door de voorrand van het hoofdrotorblad en het is erg belangrijk dat deze zo soepel mogelijk is. Hoewel een ontwerp met variabele spoed het beste zou zijn, betekent de extra complexiteit die vereist is ten opzichte van de inherente eenvoud van multi-rotor dat een propeller met variabele spoed bijna nooit wordt gebruikt.
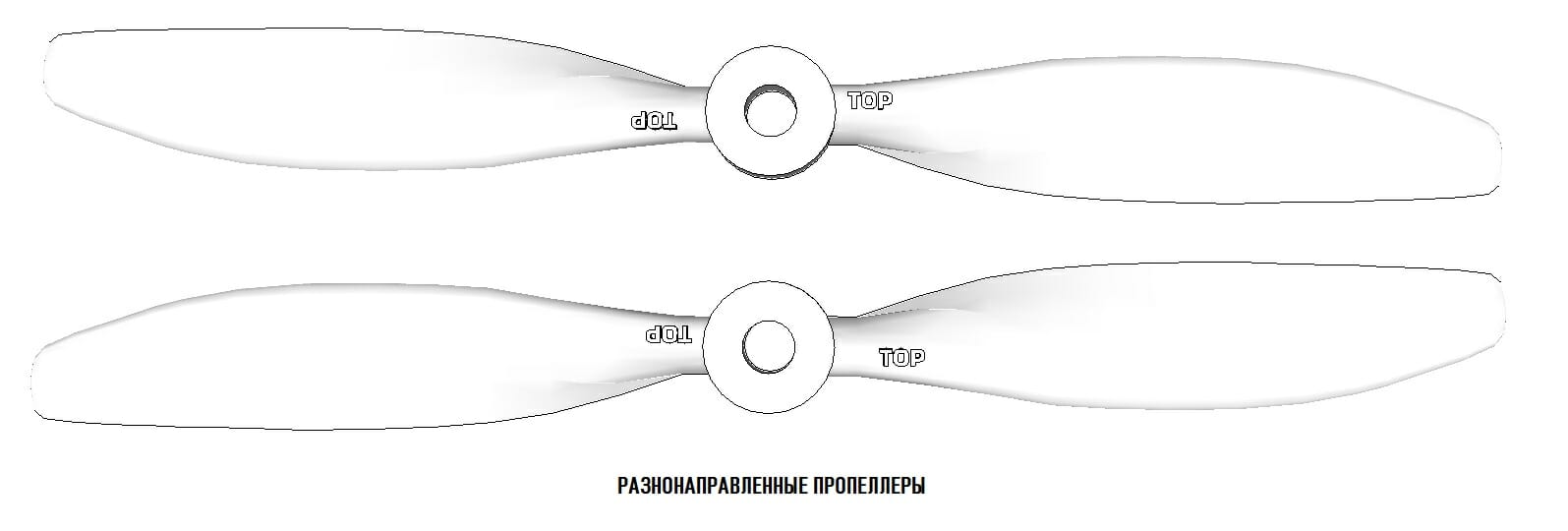
Rotatie
De rotoren zijn ontworpen om rechtsom (CW) of linksom te draaien (CCW). De draairichting wordt aangegeven door de helling van het blad ( kijk naar de propeller vanaf het uiteindeVtailY6X8
Uitvoeringsmaterialen
Materiaal(en) gebruikt voor de vervaardiging van rotoren (propellers) kunnen een matig effect hebben op de vlucht prestaties, maar veiligheid moet een topprioriteit zijn, vooral als je een beginner en onervaren bent.
- Kunststof (ABS/Nylon, enz.) is de meest populaire keuze als het gaat om UAV's met meerdere motoren. Dit is grotendeels te danken aan de lage kosten, degelijke vliegeigenschappen en exponentiële duurzaamheid. Meestal is er bij een crash minstens één propeller kapot, en terwijl je de drone onder de knie hebt en leert vliegen, zul je altijd veel kapotte rekwisieten hebben. De stijfheid en slagvastheid van de kunststof schroef kan worden verbeterd door versterking met koolstofvezel (koolstof), deze benadering is max. effectief en niet zo duur in vergelijking met een volwaardige en koolstofvezel propeller.
- Vezelversterkt polymeer (koolstofvezel, koolstofversterkt nylon, enz.) - is de "geavanceerde" technologie in veel relaties. Onderdelen van koolstofvezel zijn nog steeds niet erg eenvoudig te vervaardigen en daarom betaal je er meer voor dan voor een gewone plastic schroef met vergelijkbare parameters. Een propeller gemaakt van koolstofvezel is moeilijker te breken of te buigen, en daarom, als hij crasht, zal hij meer schade aanrichten aan alles waarmee hij in contact komt. Tegelijkertijd zijn koolstofpropellers over het algemeen goed gemaakt, stijver (met een minimaal verlies aan efficiëntie), hoeven ze zelden te worden gebalanceerd en zijn ze lichter dan enig ander materiaal. Het wordt aanbevolen om dergelijke propellers pas in overweging te nemen nadat het besturingsniveau van de gebruiker comfortabel is geworden.
- Hout is een zelden gebruikt materiaal voor de productie van UAV-rotoren met meerdere rotors, aangezien de vervaardiging ervan mechanische bewerking vereist, waardoor houten propellers later duurder zijn dan plastic propellers. Tegelijkertijd is de boom behoorlijk sterk en buigt hij nooit. Merk op dat houten propellers nog steeds worden gebruikt in radiografisch bestuurbare vliegtuigen.



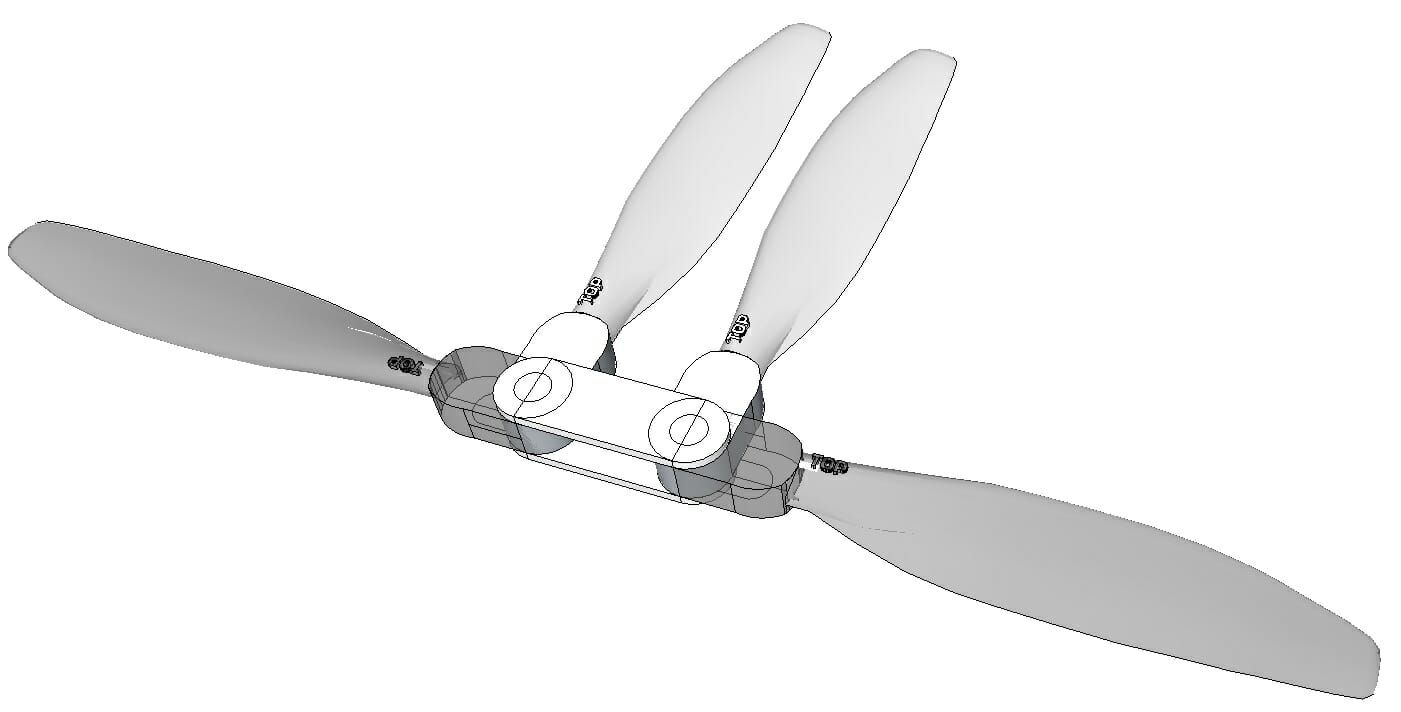
Opvouwbare
Opvouwbare steunen hebben een centraal deel dat aansluit op twee zwenkbladen. Wanneer het midden (dat is verbonden met de uitgaande as van de motor) draait, werken centrifugale krachten op de bladen, waardoor ze naar buiten worden geduwd en de propeller in wezen "stijf" wordt, met hetzelfde effect als een klassieke niet-opvouwbare propeller. Door de geringe vraag en het grote aantal benodigde onderdelen komen klapschroeven minder vaak voor. Het grote voordeel van opvouwbare props is compactheid en in combinatie met een opvouwbaar frame kunnen de transportafmetingen van de drone aanzienlijk kleiner zijn dan de vliegafmetingen. Een bijkomend voordeel van het inklapmechanisme is dat het bij een crash niet nodig is om de propeller volledig te vervangen, het volstaat om alleen het beschadigde blad te vervangen.
Installatie
Net als UAV's kunnen rotoren een breed scala aan afmetingen hebben. Er zijn dus een aantal "standaard" motorasdiameters in de industrie. In dit verband wordt de hoofdrotor vaak geleverd met een kleine set adapterringen (ze zien eruit als ringen met gaten van verschillende diameters in het midden), die zijn geïnstalleerd in de middenboring van de steun
De schroef kan aan de motor worden bevestigd op basis van welke montagemethode door uw motor wordt ondersteund. Als de motoras geen bevestigingsmogelijkheden heeft (schroefdraadverbinding, verschillende bevestigingsmiddelen, etc.), dan worden speciale adapters gebruikt, zoals propsavers en spantangen.
- Propsaver
- Spantanghouder
Borstelloze motoren met een buitenrotor (type "Outrunner"), hebben in de regel verschillende schroefdraadgatenis een even populaire optie voor het bevestigen van de propeller aan de BC-motoras
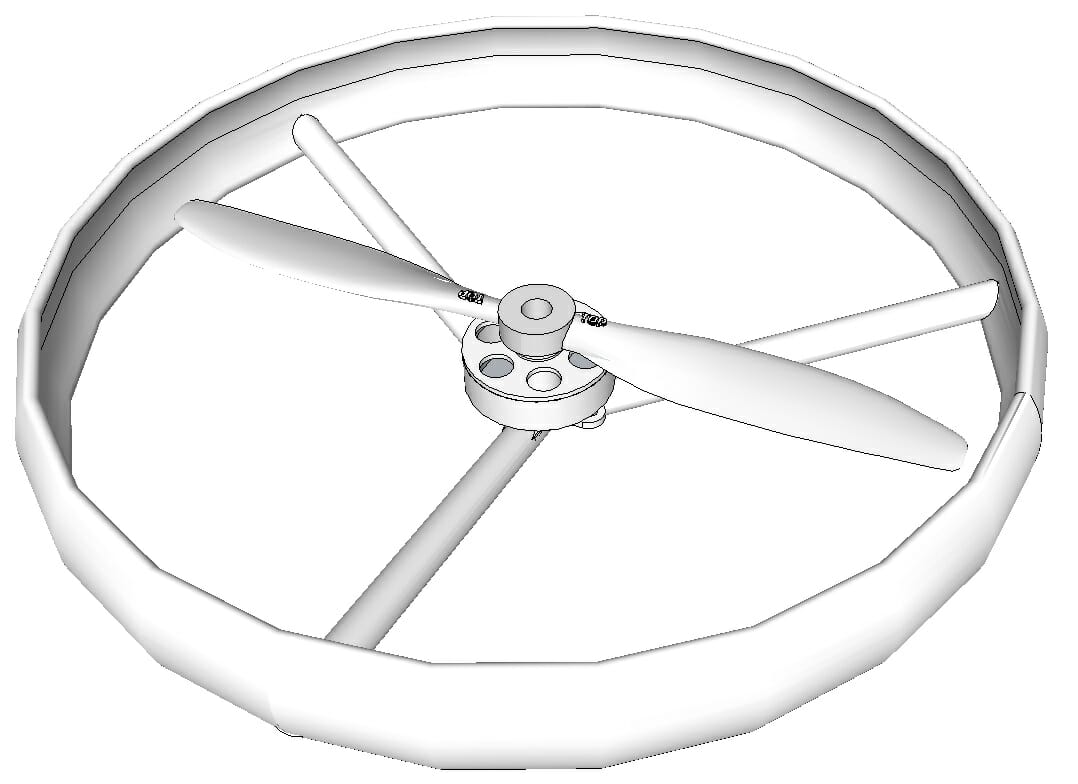
Bescherming van rotoren
Bescherming van rotoren - ontworpen om direct contact van de UAV-krachtcentrale met een naderend object uit te sluiten, waardoor de integriteit en bruikbaarheid behouden blijft, evenals ter voorkoming van letsel o snel draaiende propellers als gevolg van botsingen met mens en dier. De propellerbeschermers zijn bevestigd aan het hoofdframe. Afhankelijk van de versie kan deze het werkgebied van de energiecentrale gedeeltelijk of volledig overlappen (ringbescherming). Propellerbescherming wordt het meest gebruikt op kleine (speelgoed) UAV's. Het gebruik van beschermende elementen in de assemblage brengt ook een aantal compromissen met zich mee, waaronder:
- Kan overmatige trillingen veroorzaken.
- Is over het algemeen bestand tegen lichte klappen.
- Kan de stuwkracht verminderen als er te veel montagevoeten onder de propeller worden geplaatst.
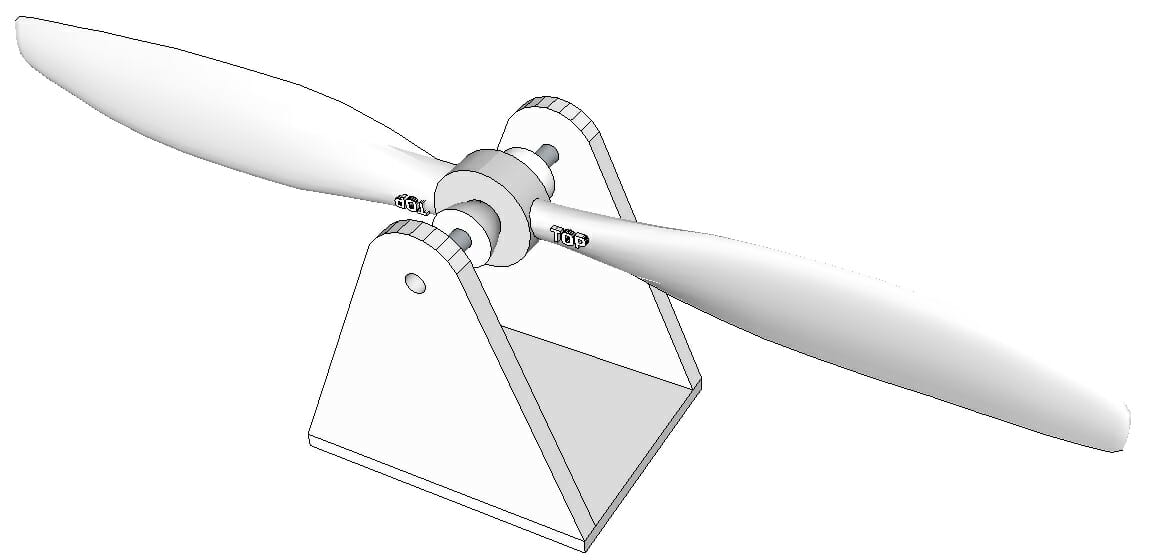
Balanceren
Bij de meeste goedkope propellers komt een slechte balancering voor. Om dit te garanderen, hoef je niet ver te gaan, steek gewoon een potlood in de centrale boring van de schroef (in de regel zal bij een onbalans de ene kant zwaarder zijn dan de andere). Daarom wordt het ten zeerste aanbevolen om uw rekwisieten te balanceren voordat u ze op de motoren installeert. Een ongebalanceerde propeller zal overmatige trillingen veroorzaken, die op hun beurt een negatieve invloed hebben op de prestaties van de vluchtcontroller (die zich manifesteert in onjuist gedrag van de drone tijdens de vlucht), om nog maar te zwijgen van een toename van het geluid, verhoogde slijtage van de elementen van de krachtcentrale en een verslechtering van de kwaliteit van het fotograferen van een hangende camera.
De propeller kan op verschillende manieren worden gecompenseerd, maar als je een drone helemaal opnieuw bouwt, dan moet er in het arsenaal aan gereedschappen een goedkope propellerbalancer waarmee u eenvoudig en eenvoudig de gewichtsonbalans in de propeller kunt bepalen. Om het gewicht gelijk te maken, kun je ofwel het zwaarste deel van de prop slijpen (het centrale deel van het blad wordt gelijkmatig geschuurd en in geen geval het propellerdeel afsnijden), je kunt ook balanceren door een stukje tape te lijmen (dun) op het lichtere mes (voeg de segmenten gelijkmatig toe totdat het evenwicht is bereikt). Merk op dat hoe verder van het midden u een balanceringsupgrade (schuren of toevoegen van een riem) van de propeller uitvoert, hoe groter het effect op basis van het koppelprincipe zal zijn.
3. ESC
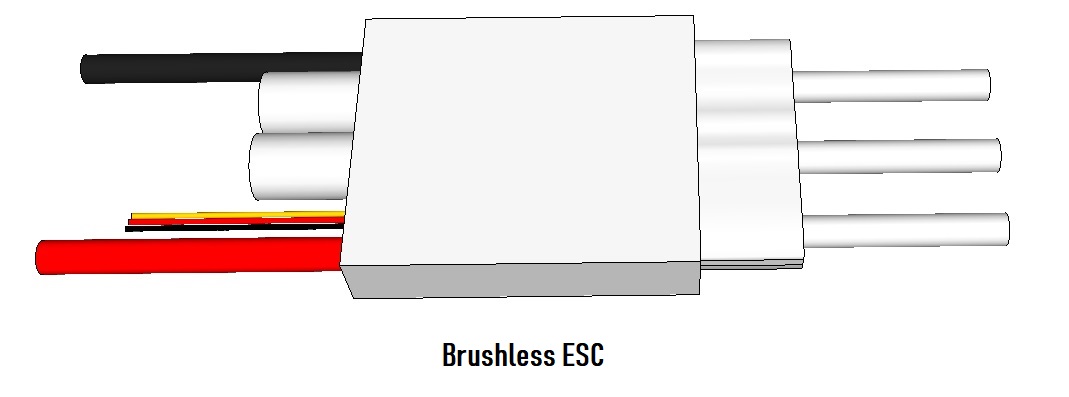
ESC (Engelse elektronische snelheidsregelaar; rus.elektronische snelheidsregelaar) - hiermee kan de vluchtregelaar de snelheid en richting van de motor regelen. Bij de juiste spanning moet de ESC max. de stroom die de motor kan verbruiken, en beperk ook de stroom die tijdens het schakelen door de fase gaat. De meeste drone-hobby-ESC's laten de motor alleen in één richting draaien, maar met de juiste firmware kunnen ze in beide richtingen werken.
Aansluiting
In eerste instantie kan de ESC verwarrend zijn omdat er verschillende draden / pinnen / connectoren beschikbaar zijn om deze aan te sluiten. zijkanten (ESC kan worden geleverd met of zonder gesoldeerde connectoren).
- Stroomvoorziening: Twee dikke draden (meestal zwart en rood) zijn voorzien om stroom te leveren vanaf het verdeelbord / harnas waarnaar de stroom rechtstreeks van de hoofdbatterij van het vliegtuig komt.
- 3 connectoren: Drie connectoren zijn beschikbaar aan de andere kant van de controller voor aansluiting op drie bullet-connectoren (meestal geleverd bij motoren) op een borstelloze motor. Het gebruik van connectoren bij het aansluiten van de ESC maakt het mogelijk om, indien nodig (in geval van storing), de controller snel te wisselen zonder een soldeerbout te gebruiken. Het komt voor dat de kogelvormige connectoren die bij de motor worden geleverd niet overeenkomen met de connectoren op de regelaar. Vervang ze in dat geval gewoon door geschikte exemplaren. Welke van de drie is "plus" en welke is "min"? Het referentiepunt is een eenvoudige, positieve draad van de batterij, gaat in positief op ESC, op dezelfde manier met een min.
- 3-pin R/C servo connector met dunne draden: waardoor het signaal afkomstig van de ontvanger wordt verwerkt, waarvan één draad signaal is (transmissie van het gas signaal naar de ESC of ingang), de tweede "Minus" (of aarde) en een positieve draad (niet gebruikt als er geen ingebouwde BEC is; met ingebouwde BEC is het een 5V-vermogensuitgang, die later kan worden gebruikt om boordelektronica).
BEC
In de begindagen van de vliegtuigmodellering werd een verbrandingsmotor gebruikt als energiecentrale, en de elektronica aan boord werd aangedreven door een kleine accu. Met de komst van elektrische tractie en controllers (ESC), in de laatste, begonnen ze het zogenaamde batterij-eliminatiecircuit op te nemen - BEC (in het Engels. Battery Eliminator Circuit; of on-board power converter; in de regel biedt het een extra stroombron met een spanning van 5V bij een stroomsterkte van 1A of hoger). Met andere woorden, het is een spanningsomzetter die wordt gebruikt in de assemblage LiPo in een spanning om de boordelektronica van de drone van stroom te voorzien.
Bij het monteren van de multirotor moeten alle ESC's worden aangesloten op de vluchtcontroller, maar er is slechts één BEC vereist, anders kunnen er problemen optreden bij het voeden van dezelfde lijnen. Aangezien er meestal geen manier is om de BEC op een ESC uit te schakelen, is het het beste om de rode draad () te verwijderen en deze met isolatietape voor alle ESC's op één na te omwikkelen. Het is ook belangrijk om de zwarte draad (massa) voor de gemeenschappelijke aarde te laten.
Firmware
Niet alle ESC's op de markt zijn even goed voor toepassingen met meerdere rotors. Het is belangrijk om te begrijpen dat borstelloze motoren vóór de komst van meermotorige UAV's voornamelijk werden gebruikt als energiecentrale voor radiografisch bestuurbare auto's, vliegtuigen en helikopters. De meeste vereisen geen snelle responstijden of updates. ESC's met ingebouwde SimonK- of BLHeli-software kunnen zeer snel reageren op binnenkomende wijzigingen, wat over het algemeen het verschil maakt tussen een stabiele vlucht of een crash.
Stroomverdeling
Aangezien elke ESC wordt gevoed door de hoofdbatterij, moet de hoofdbatterijconnector op de een of andere manier in vier ESC's worden gesplitst. Dit wordt gedaan met behulp van het StroomverdeelbordStroomverdeelharnasDeans
4. Batterij
Chemie
Batterijen die in onbemande luchtvaartuigen worden gebruikt, zijn momenteel uitsluitend lithium-polymeer (LiPo), en de samenstelling van sommige ervan is vrij exotisch - lithium-mangaan of ander lithium varianten. Loodzuur is simpelweg niet geschikt en NiMh / NiCd zijn nog te zwaar voor hun capaciteit en kunnen vaak niet de hoge ontladingssnelheden leveren die nodig zijn. LiPo biedt hoge prestaties en ontlaadsnelheid met een laag gewicht. De nadelen zijn hun relatief hoge kosten en constante veiligheidsproblemen (brandgevaar).
Spanning
In de praktijk heb je maar één batterij nodig voor je UAV. De spanning van deze accu moet overeenkomen met de door jou geselecteerde BK motoren. Bijna alle batterijen die tegenwoordig worden gebruikt, zijn gebaseerd op lithium en bevatten meerdere cellen (blikjes) van elk 3,7 V, waarbij 3,7 V = 1S (d.w.z. één-can batterij; 2S is twee-can, enz.). Daarom heeft een batterij met het label 4S waarschijnlijk een nominale waarde van 4 × 3,7 V = 14,8 V. Het aantal blikjes helpt u ook te bepalen welke oplader u moet gebruiken. Merk op dat een eencellige batterij met hoge capaciteit er fysiek uit kan zien als een meercellige batterij met een lage capaciteit.
Capaciteit
De batterijcapaciteit wordt gemeten in ampère-uur (Ah). Kleine batterijen kunnen een capaciteit hebben van 0,1Ah (100mAh), batterijcapaciteit voor middelgrote drones kan variëren van 2-3Ah (2000mAh - 3000mAh). Hoe hoger de capaciteit, hoe langer de vliegtijd en dus hoe zwaarder de batterij. De vliegtijd van een conventionele UAV kan in het bereik van 10-20 minuten liggen, wat misschien van korte duur lijkt, maar u moet begrijpen dat de drone tijdens de vlucht constant worstelt met de zwaartekracht en in tegenstelling tot een vliegtuig geen oppervlakken heeft (vleugels) die hulp bieden in de vorm van optimale hefkracht.
Ontlaadsnelheid
De ontlaadsnelheid van lithiumbatterijen wordt gemeten in "C", waarbij 1C de batterijcapaciteit is (meestal in ampère-uren, tenzij u een drone overweegt ter grootte van Palm). De ontladingssnelheid van de meeste LiPo-batterijen is minimaal 5C (vijf keer de capaciteit), maar aangezien de meeste motoren die worden gebruikt in UAV's met meerdere rotoren veel stroom verbruiken, moet de batterij met een ongelooflijk hoge stroom kunnen ontladen, wat meestal ongeveer 30A of meer.
Veiligheid
LiPo-batterijen zijn niet helemaal veilig omdat ze waterstofgas onder druk bevatten en de neiging hebben om te verbranden en/of te exploderen wanneer er is iets mis. Dus als u twijfels heeft over de gezondheid van de batterij, sluit deze dan in geen geval aan op de drone of zelfs op de oplader - beschouw hem als "buiten gebruik gesteld" en gooi hem op de juiste manier weg. De veelbetekenende tekenen dat er iets mis is met de batterij zijn deuken of zwellingen (d.w.z. gaslekkage). Bij het opladen van een LiPo-accu kunt u het beste een kluis LiPo-box (accu-safe-box) gebruiken. Batterijopslag

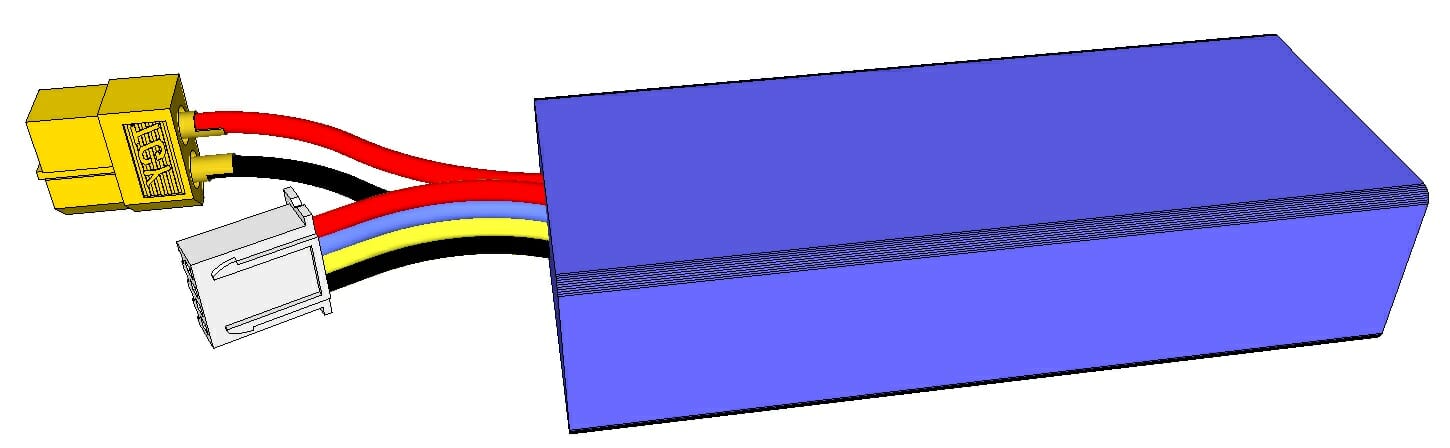
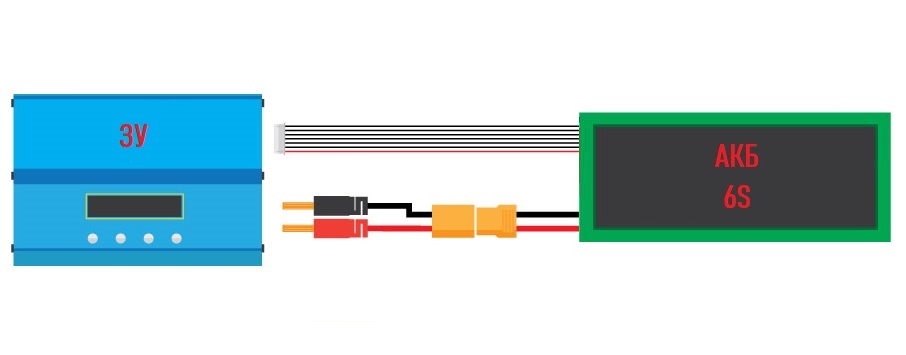
Opladen
De meeste LiPo-batterijen hebben twee connectorenDe ladermet de veiligheidsproblemen die verband houden met lithium-polymeerbatterijen
.Montage
De batterij is het zwaarste onderdeel van de drone, dus deze moet in het middelste dode punt worden geïnstalleerd om ervoor te zorgen dezelfde belasting op motoren. De batterij vereist geen speciale montage (vooral zelftappende schroeven die de LiPo kunnen beschadigen en brand kunnen veroorzaken), dus sommige bevestigingsmethoden die tegenwoordig worden gebruikt, zijn klittenband, rubber, plastic compartimenten en andere. De meest gebruikelijke optie om de batterij te monteren is om de batterij onder het frame te hangen met een klittenband.







