Inhoud
- DIY-drone: les 1. Terminologie.
- Doe-het-zelf-drone: les 2. Frames.
- Doe-het-zelf-drone: les 3. Energiecentrale.
- Doe-het-zelf-drone: les 4. Vluchtcontroller.
- Doe-het-zelf-drone: les 5. Montage.
- Doe-het-zelf-drone: les 6. Prestatiecontrole.
- DIY-drone: les 7. FPV en afstand.
- Doe-het-zelf-drone: les 8. Vliegtuigen.
Inleiding
De eerste zes lessen onderzoeken de ontwerpoverwegingen achter de creatie van een speciale meermotorige UAV / Drone. Les 7 behandelt geen assemblageaspecten, maar beschrijft een aantal aanvullende accessoires / apparaten die worden gebruikt om first-person flight (FPV) en langeafstandsbesturing te implementeren. Dit artikel is meer gericht op het gebruik van radiobesturing in het "veld"; in tegenstelling tot binnenshuis vliegen of op locaties waar stopcontacten stroom kunnen leveren. Houd er rekening mee dat deze tutorial slechts een heel klein stukje informatie bevat dat nodig is om FPV / Long Range Systems goed te begrijpen, en is voornamelijk bedoeld om de lezer kennis te laten maken met de concepten, termen, producten en principes achter FPV en langeafstandsdronebesturing.
First Person View (FPV)
First Person View (FPV) is een van de belangrijkste drijvende krachten achter de snel groeiende populariteit van meermotorige UAV's, waardoor u een totaal ander perspectief ("Bird's eye view") van onze planeet en het gevoel van vliegen. Hoewel de toevoeging van een camera aan een UAV niets nieuws is, maken het relatieve bedieningsgemak, de lage prijs en het brede assortiment drones het gemakkelijk om een drone met een camera te kopen of te bouwen.
First-person view (FPV) wordt momenteel geïmplementeerd met behulp van een tandem die vooraf in het vliegtuig is geïnstalleerd, bestaande uit een FPV-camera en een videozender, waarmee realtime video naar de piloot of assistent kan worden verzonden. Houd er rekening mee dat er kant-en-klare of halfafgewerkte FPV-systemen op de markt zijn, waarbij kant-en-klare FPV-systemen de gebruiker het vertrouwen geven dat alle elementen compatibel zijn met elkaar.
Videocamera
- Vrijwel elke videocamera die kan worden aangesloten op een videozender kan worden gebruikt om FPV-vlucht implementeren, dus het gewicht is echter belangrijk om te overwegen, omdat meermotorige UAV's constant worstelen met de zwaartekracht en de voordelen van een gevleugeld vliegtuig missen om extra lift te bieden.
- Camcorders zijn er in een grote verscheidenheid aan vormen en maten, en kunnen ook verschillende mogelijkheden hebben voor wat betreft de kwaliteit van het filmen, maar op dit moment zijn er maar weinig die specifiek zijn aangepast voor UAV's. Vanwege deze beperkingen in grootte, gewicht en prestatie, zijn de meeste camera's die worden gebruikt in FPV-systemen met meerdere motoren afkomstig van "actiecamera's", evenals CCTV- en beveiligingstoepassingen (bijv. verborgen camera's).
- Grote camera's zoals DSLR (SLR) of grote camcorders worden vaak gebruikt door professionals, maar vanwege hun gewicht is de benodigde drone meestal vrij groot.
- Sommige camcorders kunnen rechtstreeks worden gevoed door een 5V-voeding (handig omdat de meeste vluchtcontrollers ook op 5V werken wanneer ze worden gevoed door een BEC), terwijl andere mogelijk 12V of zelfs hun eigen ingebouwde oplaadbare batterij nodig hebben.
- De meest populaire camera die momenteel wordt gebruikt op UAV's met meerdere motoren is de GoPro. Dit komt door hun duurzaamheid, kleine formaat, hoge video/foto kwaliteit, ingebouwde batterij, breed assortiment aan accessoires en wereldwijde beschikbaarheid. GoPro-camera's hebben ook een USB-uitgang die kan worden gebruikt voor videotransmissie, en sommige hebben zelfs ingebouwde WiFi voor videotransmissie op korte afstand.
- Gezien het succes van GoPro hebben veel andere fabrikanten hun eigen vergelijkbare lijn sport-/actiecamera's gemaakt, maar de specificaties, prijs en kwaliteit variëren. Houd er rekening mee dat als je 3D-video nodig hebt, je twee camera's en een VTX nodig hebt die twee signalen kan verzenden.

Gimbal
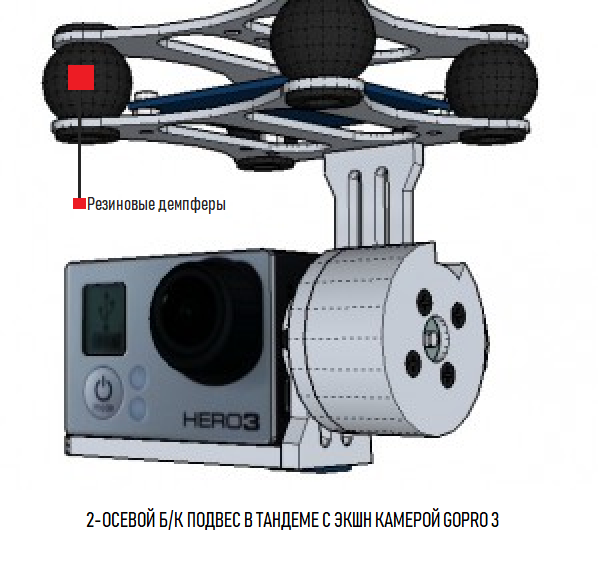
Gimbal omvat een mechanisch frame, twee of meer motoren (meestal maximaal drie voor panning, tilt en rol), evenals sensoren en elektronica. De camera is zo gemonteerd dat de motoren geen hoekkracht (koppel) hoeven te leveren om de camera in een vaste hoek ("balanced") te houden.
Met de assen in kwestie kunt u de camera pannen, kantelen of pannen. Een 1-assig systeem dat geen eigen sensor heeft, kan worden gezien als een pan- of tiltsysteem. Het meest populaire ontwerp omvat een opstelling met twee motoren (meestal BLDC-motoren die speciaal zijn ontworpen voor gebruik met cardanische ophangingen) die de kanteling en pan van de camera regelen. Hierdoor is de camera altijd naar de voorkant van de drone gericht, wat er ook voor zorgt dat de piloot niet gedesoriënteerd is als de camera in de ene richting staat en de voorkant van de drone in de andere.
De 3-assige gimbal voegt panning toe (links en rechts) en is het handigst in combinatie met twee operators, waarbij één persoon de drone bedient en de andere de camera onafhankelijk kan bedienen. In deze tweepersoonsconfiguratie kan ook een tweede (vaste) FPV-camera voor de piloot worden gebruikt. Er zijn doorgaans twee soorten cardanische systemen:
Borstelloze cardanische ophanging
- Borstelloze gelijkstroommotor (BLDC) of synchrone motor met permanente magneet (PMSM) of (Valve Motors (VD)) - Biedt een snelle respons met minimale trillingen, maar vereist een aparte (en speciale) borstelloze DC-controller.
- Om de camera automatisch waterpas te houden, wordt ergens rond de camera (meestal onder de camerabevestiging) een traagheidsmeeteenheid (IMU), bestaande uit een versnellingsmeter en een gyroscoop, geïnstalleerd, zodat de positie van de camera (ten opzichte van de grond) kan worden gevolgd. De metingen van het blok worden naar een apart DC-borstelloos controllerbord gestuurd (vaak direct boven de cardanische ophanging gemonteerd) die de motoren roteert zodat de camera in een bepaalde richting blijft ondanks elke beweging van de drone.
- De controllerkaart zelf bevat een ingebouwde microcontroller. De borstelloze DC-controller van de gimbal kan meestal rechtstreeks worden aangesloten op het kanaal op de ontvanger (in tegenstelling tot de vluchtcontroller), omdat deze reageert op veranderingen in de camera-oriëntatie, niet op de UAV-oriëntatie, en daarom niet afhankelijk is van de vluchtcontroller.
- Houd er rekening mee dat, aangezien de GoPro een populaire actiecamera is, de meeste borstelloze cardanische ophangingen zijn ontworpen om te worden gebruikt met een of meer GoPro-modellen (op basis van GoPro-grootte, zwaartepunt, cameralocatie, enz.). Je zult ook merken dat BLDC-gimbals bijna altijd demping hebben die trillingen van de drone naar de camera minimaliseert.
RC-servo-gimbals
- In het hart van RC-servo-gimbals - servoaandrijvingen hebben de neiging om langzamere responstijden te bieden dan borstelloze cardanische ophangingen en overmatige trillingen. Tegelijkertijd zijn servosystemen veel goedkoper dan borstelloze, en 3-pins servo's kunnen in de meeste gevallen rechtstreeks op de vluchtcontroller worden aangesloten, waardoor u de ingebouwde IMU in de pc kunt gebruiken om het niveau te bepalen ten opzichte van de grond, en verplaats vervolgens de servo's.

Videozender (VTX)
) hebben een ingebouwde VTX, wat betekent dat een aparte VTX-retrofit is meestal vereist. VTX's die in de dronehobby worden gebruikt, zijn tegenwoordig populair omdat ze licht en klein zijn. Andere VTX's van derden kunnen worden gebruikt, maar in dit geval zijn er enkele belangrijke overwegingen voor de stroomaansluiting waarmee rekening moet worden gehouden (mogelijk moet deze worden geconfigureerd als het apparaat alleen stroom ontvangt van de "barrel" -connector) en de ingangsspanning; Als het videoapparaat werkt op een spanning die niet aan boord van uw build is, heeft u mogelijk extra elektronica nodig, zoals een spanningsregelaar. VTX's die geen invloed hebben op de drone-hobby zijn zelden bevredigend in termen van gewicht of grootte, en zijn meestal ingesloten in een beschermende hoes (en soms onnodig zwaar).
VTX-vermogen
VTX is over het algemeen geschikt voor een specifiek uitgangsvermogen, maar er mag niet van worden uitgegaan dat iedereen elk op de markt verkrijgbaar vermogen kan gebruiken. Draadloze frequenties en stroom worden zorgvuldig gecontroleerd en gereguleerd, dus het wordt ten zeerste aanbevolen om de draadloze regelgeving in het land waar u zich bevindt te controleren.
Het door een VTX verbruikte vermogen heeft rechtstreeks invloed op het maximale bereik van zijn signalen. In Noord-Amerika vereist een draadloze zender die meer dan een bepaald vermogen (in watt) verbruikt, een vergunning van een radioamateur (HAM) om te kunnen werken. In Canada bijvoorbeeld, moet een langeafstands-FPV-operator meestal slagen voor ten minste een Basic Amateur Radio Proficiency Test om te kunnen werken op het vermogen dat nodig is voor draadloze langeafstandstoepassingen.
Als u niet gekwalificeerd bent, wordt het ten zeerste aanbevolen een videozender van minder dan 200 mW te gebruiken om het risico van juridische stappen te vermijden (de autoriteiten kunnen contact met u opnemen als uw signaal andere draadloze signalen verstoort).
Stroom voor de VTX wordt gewoonlijk geleverd door de BEC van een van de ESC's, die ook de rest van de elektronica van stroom voorziet. Als u vermoedt dat alle elektronica meer stroom trekt dan één BEC kan leveren, kunt u de BEC van de tweede ESC gebruiken om de VTX van stroom te voorzien. Het wordt niet aanbevolen om een aparte batterij te gebruiken om de VTX van stroom te voorzien.
VTX-frequenties / kanalen
De meeste VTX's werken op een van de onderstaande frequenties. Houd er rekening mee dat aangezien u waarschijnlijk al standaard regelapparatuur gebruikt die op een bepaalde frequentie werkt, het verstandig is om de VTX te selecteren zodat de frequenties niet overeenkomen. Als uw afstandsbediening bijvoorbeeld op 2,4 GHz werkt, moet u op zoek naar een VTX met een werkfrequentie van 900 MHz, 1,2 GHz of 5,8 GHz.
900 MHz (0,9 GHz)
- Laagfrequente signalen dringen gemakkelijker door muren en bomen
- DIY-antennes zijn gemakkelijk te maken omdat lage frequenties grote antennes impliceren
- Beeldkwaliteit is niet zo goed als bij 5,8 GHz
- Kan een negatieve invloed hebben op GPS-ontvangers
- Beschouwd als "oude" technologie
- Over het algemeen het beste voor middellange afstanden
1,2 GHz (1,2 tot 1,3 GHz)
- Gebruikt voor FPV-vluchten over lange afstand omdat het een goede afstand biedt
- Veel verschillende antennes op de markt
- Frequentie die doorgaans door veel andere apparaten wordt gebruikt
- Muren en obstakels hebben meer impact dan lagere frequenties
- Medium / Long Range
2,4 GHz (2,3 tot 2,4 GHz)
- Gebruikt voor FPV over lange afstanden met weinig obstakels
- Een van de meest gebruikte frequenties voor Voor draadloze apparaten
- Er zijn veel accessoires verkrijgbaar (antennes, zenders, enz.)
- Gebruik geen parallelle RC-zenders of andere apparaten die storing kunnen veroorzaken.
- Werkt mogelijk met andere frequenties, maar wordt in deze sectie niet behandeld.
5,8 GHz
- Zeer geschikt voor toepassingen op korte afstand
- Muren en andere obstakels hebben een aanzienlijke invloed op het bereik
- Antennes zijn klein / compact
- Het beste voor FPV in droneracen
Zoals je misschien hebt gemerkt, werken veel gangbare draadloze apparaten op 2,4 GHz (draadloze routers, draadloze telefoons, Bluetooth, garagedeuropeners, enz.). Dit is grotendeels te wijten aan het feit dat volgens de staatsvoorschriften van de FCC is bepaald dat de frequentieband rond dit bereik geen vergunning nodig heeft om te werken; hetzelfde voor 900MHz, 1.2GHz en 5.8GHz (binnen het gespecificeerde vermogensbereik). Het niet-gelicentieerde frequentiebereik omvat het zogenaamde gratis ISM-bereik (van het Engelse Industrial, Scientific, Medical: industrieel, wetenschappelijk en medisch bereik), beslaat de frequentieband: van 2400 tot 2483,5 MHz in de VS en Europa en van 2471 tot 2497 MHz in Japan. Dit betekent dat elke consument een draadloos apparaat kan kopen dat op een van deze frequenties werkt zonder zich zorgen te maken over regelgeving of richtlijnen. Meer informatie over de toewijzing van radiofrequenties aan amateurs is te vinden op Wikipedia.
VTX-connectoren
Niet alle VTX-connectoren hebben dezelfde connectoren, dus het is belangrijk om te weten welke connector in de geselecteerde camera is geïnstalleerd, en ook om te zien of het mogelijk is om verbinding te maken en ermee te werken de geselecteerde VTX. De meest populaire connectoren zijn composiet, mini/micro USB, en 0.1" (analoge) connectoren. Er zijn een aantal adapters/adapters op de markt, bijvoorbeeld: 0,1 ″ FPV Tx connector - miniUSB voor gebruik met een GoPro camera, wat het gebruik van dergelijke producten enorm vereenvoudigt.
Sommige VTX's hebben mogelijk ook een audio-ingang, maar in de meeste gevallen overstemt het geluid van de aandrijflijn elk geluid dat je hoopt op te nemen. Als je geluid nodig hebt, zorg er dan voor dat je de microfoon zo ver mogelijk van de motoren af plaatst (het zal veel testen vergen om de maximale optimale locatie te vinden) en selecteer een compatibele ontvanger.
VTX-antenne
VTX-antennes die op onbemande luchtvaartuigen worden gebruikt, zijn meestal "Duck" of "Whip". Eendantennes zijn de meest voorkomende en hebben het voordeel dat ze omnidirectioneel, compact, goedkoop zijn en tijdens de vlucht stationair blijven vanwege hun kleine profiel.
De antenneselectie moet overeenkomen met de VTX-frequentie. Hogere frequenties vereisen kleinere antennes, maar uitgezonden signalen hebben meer moeite om door obstakels heen te komen. Lage frequenties zijn minder storingsgevoelig, maar vereisen grote/lange antennes. Een directionele antenne wordt niet vaak gebruikt voor videotransmissie, omdat de UAV zich in elke richting in een driedimensionale ruimte kan bevinden. Idealiter zou de antenne zich ergens op de UAV moeten bevinden, waar er geen bronnen zijn van andere draadloze signalen of elektrische interferentie.
Video-ontvanger (VRX)
De video-ontvanger is meestal iets (fysiek) groter en zwaarder dan de VTX omdat de ontvanger is meestal stationair (verbonden met het scherm) terwijl de zender op de drone is gemonteerd en als zodanig klein en lichtgewicht moet zijn. Om ruimte te besparen, nemen sommige fabrikanten van lcd-schermen draadloze ontvangers met standaardfrequentie in hun beeldschermen op.
Veel FPV-enthousiastelingen gebruiken Clover Leaf- of Pinwheel-antennes op hun FPV-bril, waardoor ze hun hoofd in de richting van de drone kunnen richten om de signaalsterkte te maximaliseren. Verschillende fabrikanten van FPV-brillen hebben deze trend ook ondersteund en zijn begonnen met het opnemen van een draadloze video-ontvanger en antenne in het pakket van hun bril.
Het is duidelijk dat de frequentie waarop de video-ontvanger werkt, moet overeenkomen met de frequentie van de zender. Sommige ontvangermodellen bieden echter een grote verscheidenheid aan kanalen (een voor een), waardoor ze compatibel zijn met een verscheidenheid aan VTX's. De uitvoer van de video-ontvanger is meestal composiet (meest gebruikelijk) of HDMI. Wat u op de uitgang (videodisplay) aansluit, is aan u, en enkele van de opties worden hieronder beschreven. Om een ontvanger in het veld van stroom te voorzien, moet altijd een batterij worden gebruikt die ofwel een uitgangsspanning levert die overeenkomt met de bedrijfsspanning van de ontvanger, of een batterij die is aangesloten op een spanningsregelaar om de vereiste spanning te leveren. Merk op dat er geen video-ontvangers met een groot bereik zijn, aangezien het signaalbereik afhangt van het vermogen van de zender en de juiste antenne.

Video-ontvangerantenne
Antennes die worden gebruikt op video-ontvangers kunnen omnidirectioneel zijn (in staat om een signaal uit elke richting te ontvangen) of directioneel. De meest voorkomende antennes die op een video-ontvanger te vinden zijn, zijn: Duck-antenne, Cloverleaf / Pinwheel of, in zeldzame gevallen, directioneel (bijv. "Yagi"). Een directionele antenne is alleen relevant wanneer de UAV in een bepaalde richting vliegt ten opzichte van de operator, en de drone zal altijd "voor" de antenne zijn om het signaal niet te verliezen. Situaties kunnen zijn het verkennen van een specifiek gebied (zoals een veld) of een gebied dat ver van de operator verwijderd is.

Videoweergave
LCD-monitor (LCD-monitor)
- Bij het overwegen van een LCD-monitor, het is belangrijk om het verschil te weten tussen een desktop-/computer-lcd-monitor of lcd-tv en een die bedoeld is om draagbaar te zijn. Een tv / computermonitor heeft bijna altijd een stroomaansluiting die compatibel is met een standaard computervoedingskabel (trekt rechtstreeks wisselstroom), waardoor het erg moeilijk is om met een batterij te werken. Het LCD / OLED-scherm, dat draagbaarder zou moeten zijn, trekt vaak gelijkstroom en vereist een externe transformator om op het lichtnet (A / C) aan te sluiten.
- De grootte, vernieuwingsfrequentie en weergavekwaliteit van het beeldscherm dat wordt gebruikt voor FPV-toepassingen varieert van kleine monitoren met korrelige beelden die meerdere keren per seconde worden vernieuwd tot grote beeldschermen die, in combinatie met de juiste VTX en ontvanger, grote HD-beelden weergeven zonder enige duidelijke vertraging. Houd er rekening mee dat welk 2D-scherm u ook kiest, moet worden aangesloten op een stroombron en moet worden geïnstalleerd, hetzij in het UAV-basisstation (hieronder beschreven) of door de FPV-monitor aan de bedieningsapparatuur te bevestigen.
FPV-brillen
- 2D-brillen
- De videokwaliteit die wordt geboden door goedkope FPV-brillen kan vrij laag zijn, dus als het budget ertoe doet, houd er dan rekening mee dat u een betere ervaring kunt krijgen van een grotere LCD-monitor voor dezelfde prijs als FPV-brillen....
Head-tracking
- Head-tracking is in wezen hetzelfde als motion-tracking, namelijk het meten van de 3D-oriëntatie/-hoeken in tegenstelling tot lineaire beweging. Het sensorcomplex bestaat uit MEMS-chips van een versnellingsmeter, gyroscopen of traagheidsmeeteenheden (IMU). De sensoren zijn geïnstalleerd (of ingebouwd in) FPV / VR-brillen en sturen gegevens naar de microcontroller om de sensorgegevens als hoeken te interpreteren, die vervolgens de gegevens verzendt, hetzij via besturingsapparatuur (voor duurdere modellen) of via een afzonderlijke draadloze zender. Het ideale head-trackingsysteem is compatibel met de zender, zodat hoeken met de zender op twee vrije RC-kanalen kunnen worden verzonden.
3D / Virtual Reality
- Occulus Rift, Samsung Gear, Morpheus, smartphone-gebaseerde VR-brillen en vele andere 3D / Head -gemonteerde VR-displays kunnen worden aangepast voor gebruik met drones. Hoewel deze apparaten meestal zijn gebouwd voor 3D pc / console-gaming of als alternatief voor tv, zijn deze apparaten native 3D-compatibel en hebben ze vaak ingebouwde head-tracking-sensoren, wat steeds interessanter wordt voor de drone FPV-gemeenschap.
Slimme apparaten
- Smartphones, tablets of laptops kunnen worden gebruikt om live video weer te geven. Hun batterijen zijn ingebouwd en de apparaten zelf zijn lichtgewicht. De moeilijkheid bij het gebruik van slimme apparaten ligt in het feit dat de meeste ontvangers niet zijn ontworpen om een videosignaal te ontvangen van een draadloze video-ontvanger (een van de twee is bedraad of draadloos). Een laptop of tablet met een ingebouwde of USB videokaart kan normale composiet video ontvangen. De smartphone werkt momenteel het beste met video die via Wi-Fi wordt verzonden (van de Wi-Fi van de camera naar de Wi-Fi-adapter). Het gebruik van het wifi-videosignaal en de mobiele app van GoPro is een van de gemakkelijkste manieren om FPV te implementeren, maar het is vermeldenswaard dat het wifi-signaalbereik van de camera zeer beperkt is (10-20 meter). Omdat smartphones wijdverbreid zijn en drones een rage zijn, brengen fabrikanten regelmatig nieuwe producten uit waarvan ze profiteren, dus denk goed na voordat je een beslissing neemt.
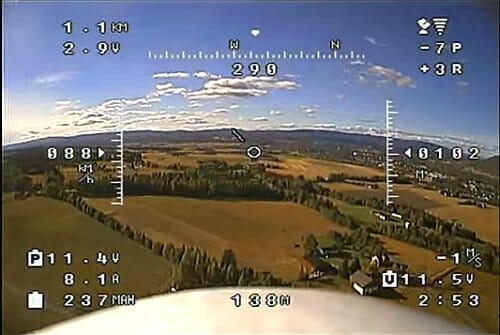
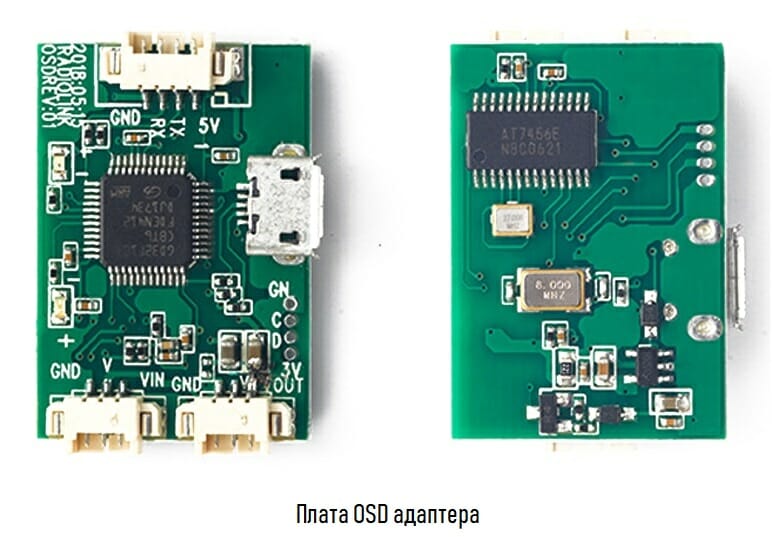
On Screen Display (OSD)
- On Screen Display (OSD) stelt de piloot in staat verschillende sensorgegevens te zien die door de vliegtuigen. Een van de gemakkelijkste manieren om gegevens op het scherm weer te geven, is door een camera met analoge uitgang te gebruiken en een displaybord tussen de camera-uitgang en VTX te plaatsen. Het OSD-adapterbord heeft ingangen voor verschillende sensoren en zal gegevens op video overlappen, zodat de piloot een video ontvangt met al overlappende telemetriegegevens.



Afstandsoverwegingen
- over het vermogen van de zender (controleapparatuur, evenals video, indien toepasselijk). Typisch RC-zenders bevatten een RF-systeem bestaande uit joysticks en schakelaars, elektronica en een RF-zender, en minder dure RC-componenten, dit systeem is bijna altijd een enkele eenheid. Hogere modellen hebben vaak een RF-module
Stroom
UAV / Drone
Je UAV / Drone bestaat uit veel verschillende onderdelen, die elk een specifieke spanning vereisen. De meest voorkomende elektronica die je aantreft in een FPV-systeem of langeafstandsdrone zijn:
- Motoren: De meeste middelgrote UAV-motoren werken meestal op 11,1 V of 14,8 V.
- Vluchtcontroller, ontvanger, GPS: idealiter zouden ze moeten worden gevoed door de BEC van een van de ESC's.
- Head tracking ontvanger: het zal ook werken vanuit BEC.
- Servo-gimbal: Een servo-gimbal kan worden gevoed vanuit een van de BEC's naar de ESC en werken op 5V.
- BLDC-gimbals: Sommige BLDC-gimbals kunnen worden aangesloten op de hoofdbatterijoplaadconnector, terwijl andere een bepaalde spanning nodig hebben. Controleer de specificaties van de gimbal die je koopt.
- Camera: Camera's die worden gebruikt voor FPV-vluchten werken meestal op 5V (van BEC) of 12V (hoofdbatterij). De meeste actiecamera's hebben hun eigen ingebouwde batterij.
- VTX: De meeste werken op 5V en kunnen worden gevoed door de BEC.
- Extra elektronica (verlichting, parachute, enz.): 5V.
Het wordt aanbevolen dat de UAV slechts één hoofdbatterij heeft en u kunt overwegen een batterij van 11,1 V of 14,8 V te gebruiken op een middelgrote drone. Als meer dan één ESC geen BEC heeft, hebt u een externe 5V-spanningsregelaar nodig om de elektronica van stroom te voorzien en ervoor te zorgen dat deze voldoende stroom kan leveren voor alles.
Piloot
Hoewel de gemiddelde drone-gebruiker zich alleen zorgen hoeft te maken over de prestaties van de besturingsapparatuur, kan de piloot van een volledige FPV-installatie uiteindelijk grote batterijen en een verscheidenheid aan extra apparatuur dragen.
- Draagbare bedieningsapparatuur: De meeste afstandsbedieningen worden standaard gevoed door "AA" -batterijen (4 × AA of 8 × AA), maar FPV heeft mogelijk externe batterijvoeding nodig om de apparatuur...
- Optionele RF-zender: Als je de bij de afstandsbediening geleverde RF-zender/ontvanger niet gebruikt, hebben duurdere modellen meestal een voedingsuitgang waarop deze module kan worden aangesloten.. Als alternatief kunt u hem van stroom voorzien met een externe oplaadbare batterij die de afstandsbediening van stroom voorziet.
- Head-tracking-ontvanger: Meestal kan dit apparaat worden gevoed door 5V.
- Video-ontvanger: De meeste hebben 12V nodig, maar hebben vaak een vrij breed ingangsspanningsbereik. Meestal wordt de ontvanger geleverd met een voedingsadapter die u niet in het veld zult gebruiken. Controleer de ingangsspanningsbereiken om te zien of u dezelfde spanning kunt gebruiken om de zender en ontvanger van stroom te voorzien (bijv. 7,4 V of 12 V).
- Videoscherm: Zorg ervoor dat u een draagbaar LCD-scherm selecteert met een 'barrel'-connector zodat u de batterij voor invoer kunt gebruiken. FPV-brillen hebben meestal ook een Barrel-ingang, maar vergeet deze niet te controleren. De meest voorkomende spanning voor draagbare LCD's is 12V, wat misschien niet de beste is voor andere apparaten.
- Antennevolger: Hieronder beschreven. Dit gemotoriseerde apparaat bestaat vaak uit radiografisch bestuurbare servomotoren, een microcontroller en extra sensoren/elektronica. Er zijn maar heel weinig commerciële systemen beschikbaar voor de hobbydrone-markt, dus als je zo'n systeem ontwerpt en bouwt, moet je een stroomopstelling ontwikkelen.
Basisstation
Zoals hierboven vermeld, is er veel apparatuur die de piloot moet dragen en aandrijven, en die kan erg omvangrijk zijn. Basisstations worden vaak gebruikt om de operator van deze last/verwarring te bevrijden en kunnen bestaan uit een willekeurig aantal verschillende hieronder vermelde apparatuur en compartimenten. Het is niet moeilijk voor te stellen dat het resultaat van de voorbereiding op de vlucht afhangt van hoe goed het basisstation is gemonteerd, de kabelbomen die al deze apparaten verbinden, zijn gelegd.
Het basisstation kan zijn:
- De hoofdbatterij, mogelijk gebruikt om de LCD-monitor en/of FPV-bril en eventueel een video-ontvanger.
- Hulpbatterij voor zender en/of video-ontvanger.
- Bevestiging voor LCD-monitor en/of FPV-brilbevestiging.
- Bevestiging voor video-ontvanger.
- Opbergruimte voor regelapparatuur.
- Bevestiging voor langeafstandsantenne (of locatie voor een draagbare richtantenne)
- Een locatie voor een oplader voor de hoofdbatterij(en).
- Ruimte voor reserveonderdelen voor de drone (propellers, motoren, batterijen, frame-elementen).
Het "basisstation" is niet per se een commercieel geproduceerd product dat gemakkelijk kan worden gebruikt met elke onbemande toepassing, integendeel, het kan door een amateurpiloot zelf worden ontworpen en gebouwd. Meestal begint het bouwen van een basisstation met het kiezen van een duurzame draagtas (zoals een Pelican of Nanuk), al kan een stevige rugzak ook gebruikt/aangepast worden. Vaak wordt een statief gebruikt om de antenne hoger van de grond te monteren.

.Antenne-tracker
Antenne-tracker is een elektromechanisch apparaat dat de positie van een drone in drie dimensies volgt met behulp van GPS-coördinaten, en de locatie van de GPS-tracker kent, richt de antenne naar de zijdrone. Antennetrackers worden vaak gebruikt bij langeafstandsmissies en er zijn niet veel commerciële producten op de markt. De tracker bestaat uit een GPS-ontvanger, een kompas (en soms een IMU), een microcontroller, een gegevensontvanger (voor het ontvangen van de GPS-coördinaten van de drone), een draai- en een kantelmotor, een mechanisch frame, een richtantenne en een batterij. Om de negatieve impact van obstakels te verminderen, worden de antennetrackersystemen met een statief van de grond getild.








