Inhoud
- DIY-drone: les 1. Terminologie.
- Doe-het-zelf-drone: les 2. Frames.
- Doe-het-zelf-drone: les 3. Energiecentrale.
- Doe-het-zelf-drone: les 4. Vluchtcontroller.
- Doe-het-zelf-drone: les 5. Montage.
- Doe-het-zelf-drone: les 6. Prestatiecontrole.
- Doe-het-zelf-drone: les 7. FPV en afstand.
- Drone met je eigen handen: les 8. Vliegtuigen.
Inleiding
In les 5 moest je de drone in elkaar zetten (zonder propellers te installeren). Neem de tijd, want zelfs kleine fouten kunnen tot een crash leiden. Je hebt nog een paar stappen voor je eerste vlucht, dus wees geduldig en volg de onderstaande richtlijnen. Net als in de vorige les gaan we ervan uit dat je radiobesturingsapparatuur gebruikt om te communiceren met de UAV (als de meest gebruikte besturingsmethode op dit moment).
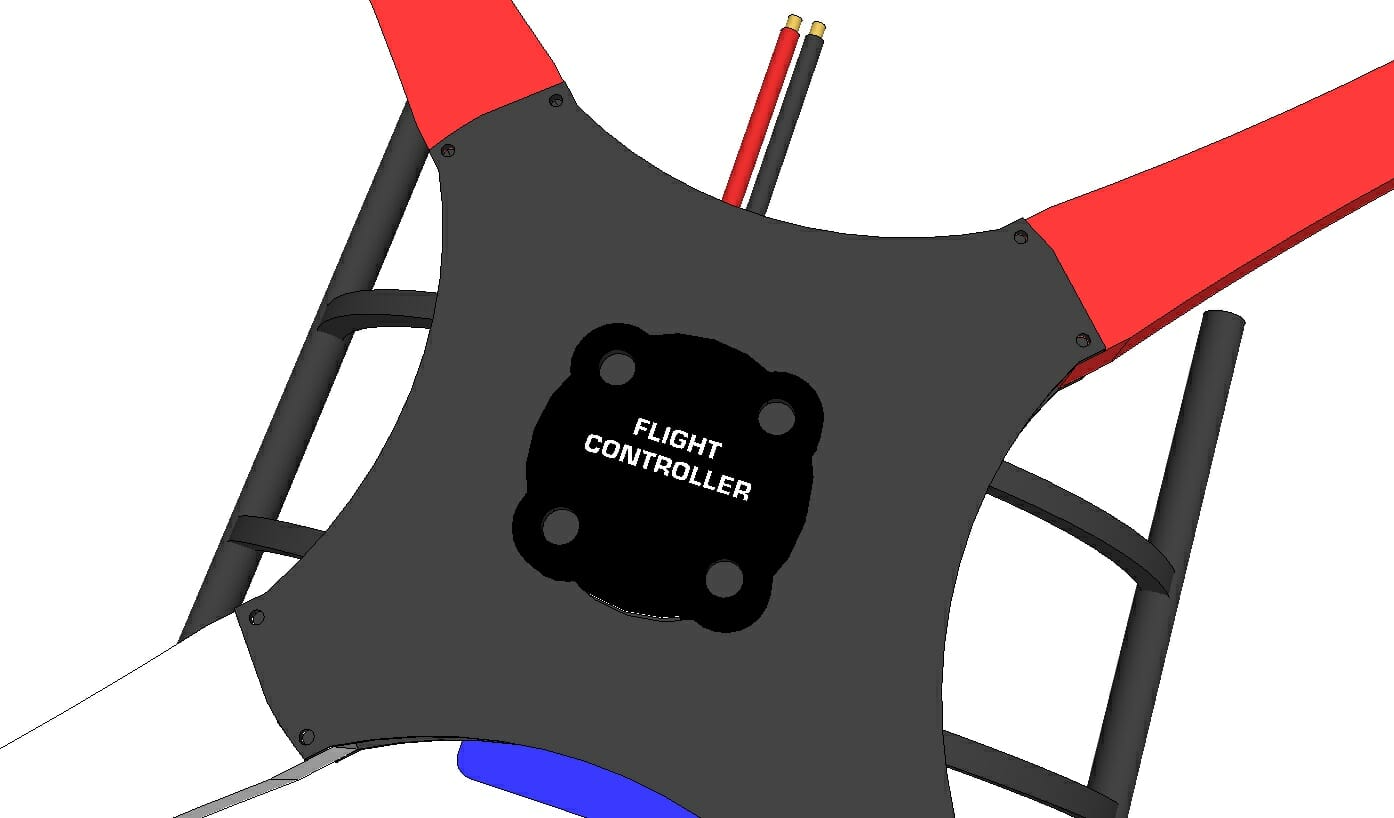
Vluchtcontroller
- Niet alle vluchtcontrollers zijn hetzelfde, dus de instellingsprocedure hangt echt af van het model dat u kiest. Als je dat nog niet hebt gedaan, neem dan de tijd om de gebruikershandleiding van de geselecteerde vluchtcontroller van begin tot eind grondig door te lezen. Het weglaten van het kleinste detail kan het verschil maken tussen een eerste succesvolle vlucht en een volledige afschrijving. Een goed geschreven gebruikershandleiding zou alles moeten bevatten wat je op deze pagina vindt en meer, dus het is aan te raden deze tutorial te gebruiken als een checklist en niet als een vervanging/alternatief voor de basisinstructies voor ontwikkelaars.
- De meeste vluchtcontrollers bieden een stapsgewijze procedure voor het selecteren van instellingen voor een specifieke UAV-configuratie, inclusief volledige controle over PID-waarden. De waarden voor elk (P, I en D) kunnen worden aangepast aan uw specifieke frame en vliegstijl; van iets stabieler voor het gebruik van het platform bij luchtfotografie, tot iets dat meer lijkt op sportvluchten (het uitvoeren van salto's, droneracen, enz.). Het begint meestal met de standaardwaarden voor elk veld, en als je niet genoeg ervaring hebt om ze te wijzigen, is het aan te raden alles te laten zoals het is tot de eerste vlucht.
- In de handleiding van de vluchtcontroller moet ook worden aangegeven hoe het minimumtoerental van de krachtbron moet worden ingesteld, dat wil zeggen de snelheid waarmee de motoren draaien wanneer ze worden belast. In eerste instantie kun je deze waarde relatief laag instellen - net genoeg om de motoren te zien draaien, maar niet zozeer dat de UAV's worden bewogen door de stuwkracht die ze genereren. De maximale stuwkracht, als u deze waarde kunt instellen, moet overeenkomen met de maximale waarde die de gashendel van uw voorschakelapparaat kan bieden.
- Een aspect dat in de gebruikershandleiding van de vluchtcontroller kan worden besproken zonder suggesties te doen, is de vliegmodus. Terugkomend op Les 4, "Vliegmodus" bepaalt welke sensoren worden gebruikt om de drone te stabiliseren, evenals zijn functie / doel. De meest voorkomende sensoren op een vluchtcontroller zijn gyroscoop, versnellingsmeter, barometer, kompas en mogelijk GPS.
- Als dit je eerste drone is, wordt het ten zeerste aanbevolen om de meest stabiele vluchtmodus beschikbaar te hebben voor je vluchtcontroller, die de meeste beschikbare sensoren gebruikt om de drone te stabiliseren. In het algemeen is dit omdat de instellingen van de PID-regelaar mogelijk te ver van uw frame/instellingen verwijderd zijn. Daarom kunt u het beste de standaard PID-regelaarwaarden kiezen. Als je al eerder hebt gevlogen, is de ACRO-modus (die alleen de gyroscoop gebruikt) misschien wel de beste.
- Met de meeste vluchtcontrollers kunt u ook de "vluchtmodus" tijdens de vlucht wijzigen via een back-upkanaal. Als uw afstandsbediening bijvoorbeeld zes kanalen heeft, kunt u overwegen kanaal 5 of 6 toe te wijzen (die vaak worden geassocieerd met schakelaars), zodat u de vliegmodus kunt wijzigen terwijl u met de drone vliegt. Zorg ervoor dat u voordat u gaat vliegen weet welke schakelaarpositie overeenkomt met welke vliegmodus.
- Het wordt ten zeerste afgeraden om GPS-hotspotvluchten of meer geavanceerde functies/sensoren te gebruiken (bijvoorbeeld een ultrasone afstandssensor om de afstand tot de grond te bepalen) totdat u zeker weet dat de UAV goed is afgesteld. Sommige handleidingen raden aan om alleen de ACRO (acrobatische) modus te gebruiken, maar als u geen noemenswaardige vliegervaring heeft, is vliegen in deze modus fysiek niet mogelijk voor u, de modus is het moeilijkst te besturen, aangezien stabilisatie is uitgesloten.
Configuratie van bedieningsapparatuur
- Sommige consoles hebben verschillende werkingsmodi, zoals vliegtuig, helikopter, auto enz. In 4 (Sectie: Besturing) hebben we de vier belangrijkste besturingskanalen besproken: Throttle, Yaw, Pitch and Roll, meestal waarden die worden geassocieerd met vliegtuigen of helikopters. Als de handleiding van de vluchtcontroller geen specifieke modus voor de zender specificeert, wordt aanbevolen om de vliegtuigmodus te gebruiken.
- Er zijn twee soorten afstandsbedieningen: modus 1 (modus 1) en modus 2 (modus 2). Mode 2 (meest gebruikelijk) met dit type besturing is Throttle and Yaw geassocieerd met het linkerkanaal / stick / joystick, Pitch and Roll met rechts. Je kunt hun toewijzing ook dubbel controleren door de stokjes rechtstreeks te bewegen om ervoor te zorgen dat de waarden niet worden omgekeerd.
- Zendermodi voegen vaak kanaal-/signaal "offset"-niveaus toe om beweging geschikter te maken voor een bepaald systeem, maar de meeste vluchtcontrollers geven om elke offset en als zodanig de voorkeur geven aan "ruwe" waarden. Als uw zender geen modi heeft, controleert u gewoon welk kanaal / stick / joystick waarvoor verantwoordelijk is.
- Een RC-zender voor algemeen gebruik kan slechts een beperkt bereik aan signalen op elk kanaal leveren, en daarom adviseren we u in deze les uit te zoeken welk bereik aan waarden een RC-zender kan bieden en of het minimum en maximale waarden kunnen worden aangepast (of als waarden of als een percentage van het standaardbereik). Op MultiWii gebaseerde vluchtcontrollers hebben bijvoorbeeld zenders nodig die een volledig bereik van pulsen van 500 ms tot 2500 ms kunnen leveren, terwijl de standaardinstelling alleen 1000 ms tot 2000 ms kan zijn, omdat dit een gebruikelijke configuratie is voor R / C-vliegtuigen. Lees de handleiding van uw zender voor het instellen van signaaleindpunten/bereik (indien van toepassing).
- Als uw controller een LCD-scherm heeft, kunt u dit vaak doen via de interface onder "Instellingen".
- “Test van regelapparatuur bij max. Afstand ”is het gemakkelijkst te implementeren met de hulp van een vriend / helper, of sluit een zoemer of andere visuele / hoorbare feedback aan op de RC-drone. Sommige duurdere modellen hebben een bereiktestfunctie. Het doel van de test is om te zien hoe ver het signaal aflegt voordat de ontvanger het niet meer kan opvangen. Het wordt aanbevolen om de bereiktest pas te gebruiken na de zogenaamde "Vechtvlucht" (Vechtvlucht - de drone wordt getest op prestaties op korte afstand, binnen de gezichtslijn van de piloot-drone). Bereiktestprocedure:
- Schakel de besturingsapparatuur in en vervolgens het vliegtuig.
- Stap 15 meter achteruit en activeer de schakelaar die bij de zoemer hoort; Je moet hem horen.
- Als je geen zoemer hebt, zet dan het vliegtuig aan en zorg ervoor dat de motoren draaien.
- Zet de zoemer stil / schakel de drone weer in
- Herhaal deze stappen steeds verder (zichtlijn) totdat de drone reageert op uw invoer.
- Dit is de absolute maximale afstand die u met uw drone kunt vliegen.
- Je denkt misschien dat je niet van plan bent om zo ver te vliegen, maar bedenk dat de drone in drie assen beweegt en dat er iets mis kan gaan.
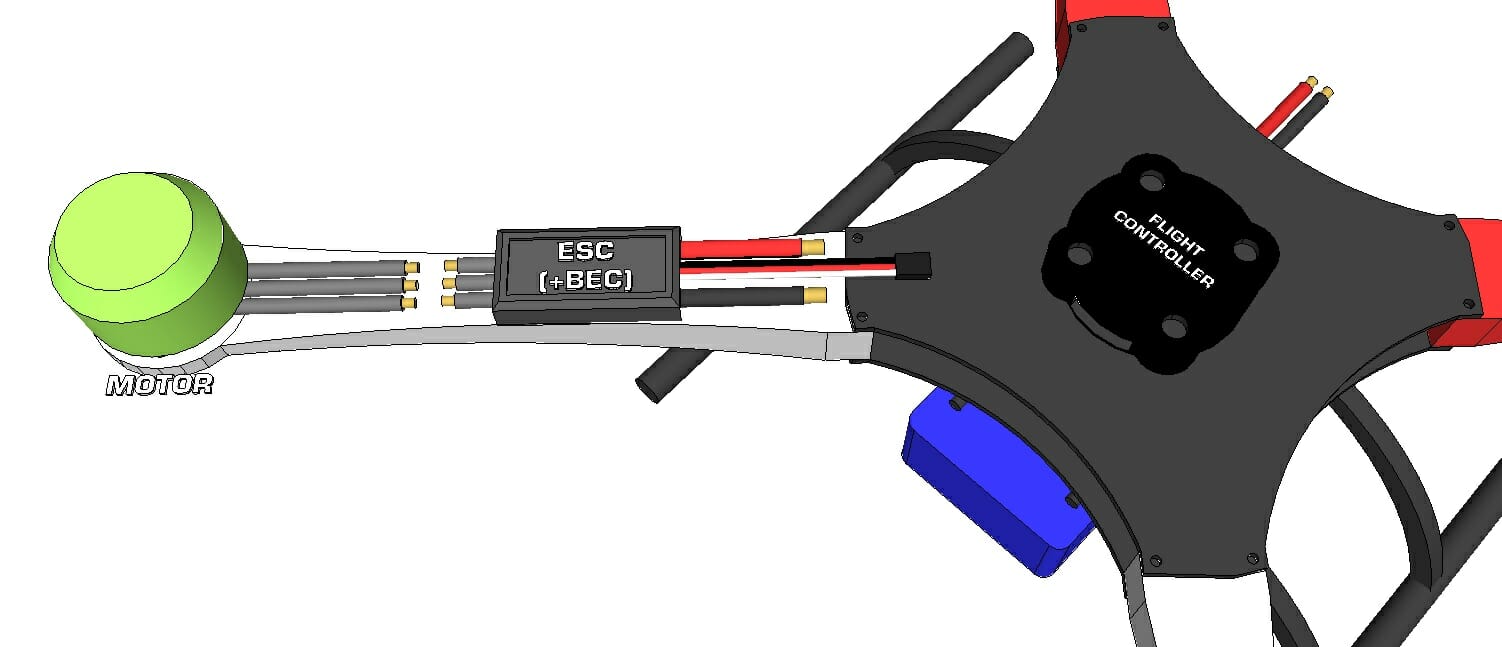
ESC-kalibratie
ESC werkt direct uit de doos, maar de signalen (PWM / PWM) die zijn gekoppeld aan minimale en maximale gasklep komen mogelijk niet overeen met wat wordt geleverd uw zender. Daarom moet u elke ESC "trainen" met de vereiste waarden. Zorg ervoor dat er geen propellers op motoren zijn gemonteerd. Raadpleeg de gebruikershandleiding van uw vluchtcontroller. Na herprogrammering behoudt de ESC zijn huidige configuratie, zelfs als deze niet wordt gevoed. Daarom wordt elke ESC slechts één keer geprogrammeerd, tijdens de eerste test / setup.
Gewoonlijk is er een sectie in de handleiding van de vluchtcontroller waarin wordt uitgelegd hoe de ESC moet worden gekalibreerd en hoe dit moet. Als dat niet het geval is, kunt u een van de onderstaande methoden proberen. Nogmaals, als uw propellers nog niet zijn verwijderd, is het tijd om dit te doen.
Zender
- Sluit een ESC aan op de "Throttle"-pin op uw ontvanger. Als uw ESC geen BEC heeft aangesloten, kunt u een BEC-compatibele ESC aansluiten op een andere pin op de ontvanger (zoals de batterij-ingang) om de ontvanger van stroom te voorzien.
- Sluit de ESC aan op de juiste motor (indien nog niet aangesloten).
- Zet de stick / joystick die bij "Throttle" hoort, op maximum (meestal de linker joystick / joystick en volledig vooruit / omhoog) en zet vervolgens de zender aan.
- Sluit de LiPo-batterij aan op het stroomverdeelbord of rechtstreeks op deze ESC (als de connectoren compatibel zijn).
- De motor moet drie keer piepen (11,1 V LiPo), gevolgd door een korte pauze gevolgd door twee korte pieptonen (dit is de maximale pieptoon).
- Verplaats onmiddellijk na korte pieptonen de gashendel / joystick naar de laagste stand (dit is de minimale pieptoon).
- De motor moet drie keer piepen (11,1 V LiPo), gevolgd door een lange piep.
- Het gasbereik voor deze ESC is nu ingesteld, ga verder met de volgende totdat alle ESC's zijn gekalibreerd.
Andere methoden
Volg de instructies in de gebruikershandleiding van het product om het minimale/maximale ingangsbereik van de ESC af te stemmen op wat het van de zender zal ontvangen.
- USB: Sommige ESC-modellen zijn programmeerbaar via USB, onafhankelijk of met een adapter.
- Programmeerbord: Extern ESC-programmeerbord, kan met bijna elke ESC worden gebruikt en is een stand-alone apparaat.
- Microcontroller: Deze methode wordt niet veel gebruikt, maar het is zeker mogelijk om de ESC te herprogrammeren met een microcontroller als je de juiste code hebt en correct kunt aansluiten.
- Vluchtcontroller: Met sommige vluchtcontrollers kunt u ESC's kalibreren of programmeren via hun programmeerinterface. Lees de instructies voor uw vluchtcontroller om te zien of dit mogelijk is.
Motor en hoofdrotor (propeller). Richting.
U bent nu klaar om de propellers te installeren. Laten we teruggaan naar 3 les, waarin de richting van de hoofdrotor wordt besproken zodat deze stuwkracht creëert. Alle propellers hebben een boven- en onderkant, en een CW (met de klok mee) en CCW (tegen de klok in) draairichting. Er is meestal tekst aan de bovenkant van een steun die de hoogte en diameter aangeeft. Wanneer de propeller op de motoras is gemonteerd, is deze bovenkant naar de lucht gericht, ongeacht of de motor aan de bovenkant van de drone-balk of aan de onderkant van de drone is gemonteerd.

Pilot Preflight Checklist
Hoewel de drone niet zo complex of gevaarlijk is als een echt commercieel vliegtuig, kun je als piloot en moet een checklist vóór de vlucht hebben om ervoor te zorgen dat de aanstaande vlucht geen gevaar voor mensen of eigendommen oplevert. De onderstaande lijst dekt alleen de essentiële zaken en moet vóór elke vlucht worden uitgevoerd (niet alleen voor de eerste).
- Zorg ervoor dat je een van de visuele hulpmiddelen bij de hand hebt om te zien welke kant van je drone zich voor je bevindt. Breng minimaal gekleurde tape aan op de twee voorbalken.
- Zorg ervoor dat de batterij van de regelapparatuur is opgeladen.
- Schud de UAV lichtjes - niets mag losraken, rammelen of op de grond vallen. Je weet nooit wat er verplaatst of kapot is gegaan als gevolg van een harde landing op een eerdere vlucht.
- Zorg ervoor dat de propellers nog stevig vastzitten.
- Schakel eerst de besturingsapparatuur in en schakel vervolgens de drone in (houd uw handen uit de buurt van de rotors).
- Zorg ervoor dat u de motoren betrouwbaar kunt in- en uitschakelen (ze moeten met een laag toerental draaien bij "Inschakelen" en stoppen met draaien bij "Ontwapenen")
- Zorg ervoor dat u kalibreert of dat de sensoren goed zijn gekalibreerd (u moet dit regelmatig doen)
- Controleer het bereik van de zender.
- Zorg ervoor dat het vlieggebied volledig vrij is en laat het hen weten als er iemand is, vooral nieuwsgierige kinderen; dat u met de UAV vliegt en dat u niet nadert voordat de drone is geland met de motoren volledig stil.

Testen
Totdat je voldoende vertrouwen hebt gekregen in je capaciteiten als piloot en drone-ontwerper, is de volgende procedure voorgesteld voor iedereen onbemande luchtvaartuigen voor hun eerste vlucht.
- Zet de motoren aan en zorg ervoor dat ze in de juiste richting draaien zoals beschreven in de handleiding van de vluchtcontroller.
- Breng de gashendel / joystick heel langzaam omhoog en zorg ervoor dat de propellers de lucht naar de grond duwen. Het gebruik van tissuepapier is een veilige optie voor visuele inspectie.
- Beweeg de pitchstick / joystick heel voorzichtig naar voren / naar achteren om ervoor te zorgen dat de drone correct naar voren / naar achteren kantelt.
- Beweeg de Roll stick/joystick heel voorzichtig naar elke kant om er zeker van te zijn dat de drone correct reageert.
Als de drone zich niet goed gedraagt, zijn er veel mogelijke redenen, waaronder de meest voorkomende:
- Een of meer motoren draaien in de verkeerde richting.
- De vluchtcontroller is niet correct geïnstalleerd en wat het als "voorwaarts" beschouwt, verschilt van je fysieke UAV.
- Een of meer contacten tussen de ontvanger en de vluchtleider zijn niet correct of zelfs op de verkeerde plaats aangesloten.
- Misschien is alles correct ingesteld, gewoon te snel of te abrupt om op gebruikersinvoer te reageren.
Noodplan
net aan de slag in het veld en/of met een nieuwe drone. De onderstaande lijst is bedoeld om u dingen te geven om over na te denken en enkele ideeën over hoe en waarom te reageren op aspirant-piloten. De beslissing wordt van geval tot geval genomen en kan in sommige situaties in tegenspraak zijn met wat hier wordt voorgesteld. Dus leer jezelf kennen, leer je omgeving kennen en wees voorzichtig! In bijna alle gevallen is het beter om de drone te verliezen dan het risico van botsingen met mensen of eigendommen.
De drone is heel ver weg en je weet niet in welke richting hij is.
- Verlaag het gaspedaal en kijk of de drone reageert (controleert of er een verbinding is).
- Als de drone reageert op gas, probeer dan daar te landen (als je kunt).
- Als deze locatie niet geschikt is om te landen, probeer de drone dan voorzichtig naar voren te sturen (niets drastisch), en als de drone reageert door op je positie te vertrouwen, kun je door naar links of rechts in de lucht te bewegen bepalen zijn oriëntatie. Als het niet naar links of rechts lijkt te bewegen, kan het naar je toe of van je af bewegen, dus maak ongedaan wat je net hebt gedaan en probeer naar links te schuren.
De drone wijkt plotseling scherp uit de koers (met of zonder reden).
- Als je niet bedreven bent in het besturen (om te proberen het te herstellen), gooi dan het gas helemaal los en laat het vallen: in dit geval kan het overwegen van radicale actie ertoe leiden dat je uit het oog verliest van de drone of, erger nog, de drone begint van een grotere afstand te klimmen en te vallen.
De drone beweegt zich snel naar mensen toe.
- Gas tot maximum zodat het hoogte wint en eroverheen vliegt; je drone zal waarschijnlijk nog steeds in de juiste algemene oriëntatie zijn, dus het is beter om de drone te verliezen dan op mensen te vliegen.
- Nadat u de optimale hoogte heeft bereikt, probeert u de controle terug te krijgen en plaatst u deze vervolgens zodanig dat deze zich boven het vrije landingsgebied bevindt.
De drone beweegt snel naar je toe.
- Gas naar nul; laat hem de grond rammen, vlieg dan in je hoofd.
De drone reageert niet op input van de regelapparatuur.
- In dat geval kunt u niets doen. Als je drone nog in de lucht is, kunnen de batterijen van je afstandsbediening leeg zijn.
De drone verliest de propeller.
- Verlies van een propeller beïnvloedt zowel stuwkracht als gier; probeer eerst de gier recht te trekken (u moet waarschijnlijk de stick / joystick die op de yaw is aangesloten, in de uiterste stand houden), en beweeg dan tegelijkertijd voorzichtig de gashendel / gashendel omhoog om een botsing te voorkomen en vervolgens de gashendel naar beneden.
Eerste vlucht
Ongeacht uw eerdere vliegervaring, moet uw eerste vlucht, vooral met een aangepaste meermotorige UAV, zo discreet mogelijk zijn. Het doel van de eerste vlucht is ervoor te zorgen dat alles correct is ingesteld; evenals het identificeren van ernstige problemen.
- Locatie: open gebied, weg van gebouwen, mensen en eigendommen. Bijvoorbeeld: een leeg voetbalveld, honkbalveld, enzovoort zou ideaal zijn. Er mag helemaal geen wind zijn.
- Doorloop de preflight-checklist van de piloot.
- Ga op ongeveer 2 meter afstand van de drone staan met de voorkant van de drone van je af gericht.
- Schakel de motoren in.
- Beweeg de gashendel/joystick voorzichtig omhoog. Bereik het punt waar de drone klaar is om op te stijgen. Er kunnen enkele grondeffecten zijn waardoor de drone een beetje stuitert, maar maak je geen zorgen.
- Voeg gas toe om de drone van de grond te krijgen en te wennen aan de besturing - probeer hem binnen een bepaalde straal te houden en kijk hoe hij reageert op je stick-/joystickbewegingen.
- Maak kleine, geleidelijke en vloeiende bewegingen - niets te plotseling. Laat de gashendel zakken om een ongeval te voorkomen.
- Als uw drone zich niet gedraagt zoals verwacht (bijvoorbeeld, het verplaatsen van de "Pitch"-as leidt tot zijn pitch, evenals naar links of rechts rollen), is er iets mis en moet u erachter komen oorzaken van de gesignaleerde problemen...
- Als de drone zich gedraagt zoals verwacht, is het jouw taak om stabiel op een hoogte van 1,2-2 meter van de grond te blijven. Niet zo snel boos worden.


.Extra vluchten
Nu je glitches hebt uitgewerkt en vliegt comfortabel in een gecontroleerde omgeving, kunt u doorgaan met de tweede vlucht.
- Aangezien de drone nog steeds niet volledig is getest, raden we aan om de volledige preflight-procedure voor de eerste vlucht te doorlopen, die niet lang zou moeten duren.
- Gebruik vloeiende bewegingen om te wennen aan hoe de drone reageert op je stick / stick-bewegingen door hem op veilige afstand te houden.
- Aanpassing aan het besturen van een drone moet gebeuren zonder de hulp van FPV en verschillende sensoren.







