Spis treści
- Dron DIY: Lekcja 1. Terminologia.
- Dron zrób to sam: Lekcja 2. Ramki.
- Dron zrób to sam: Lekcja 3. Elektrownia.
- Dron zrób to sam: Lekcja 4. Kontroler lotu.
- Dron zrób to sam: Lekcja 5. Montaż.
- Dron zrób to sam: Lekcja 6. Kontrola wydajności.
- Dron zrób to sam: Lekcja 7. FPV i dystans.
- Dron własnymi rękami: Lekcja 8. Samoloty.
Wstęp
Tak więc, zanim zaczniesz składać drona, pierwszym krokiem jest wybór ramy. Możesz wykonać go samodzielnie lub skorzystać z gotowych rozwiązań (zestaw ramowy BSP). Jak być może zauważyłeś, do tworzenia wielowirnikowych bezzałogowców można wykorzystać różne rodzaje ram i konfiguracji. Dlatego w tym dziale rozważymy powszechne lub podstawowe rodzaje ram, materiały wykonania, a także zagadnienia związane z projektowaniem.
Rodzaje ram BSP
Tricopter
- Opis: UAV, który ma trzy wiązki, z których każda jest połączona z silnik. Uważa się, że przednia część tricoptera jest stroną połączenia dwóch belek (Y3). Kąt między belkami może się różnić, ale zwykle wynosi 120°. Aby przeciwdziałać żyroskopowemu efektowi nieparzystej liczby wirników, a także zmienić kąt skrętu, tylny silnik musi mieć możliwość obracania się (osiąga się to po zainstalowaniu konwencjonalnego serwomotoru RC). Aby wykluczyć z montażu użycie serwomechanizmu, należy zastosować konstrukcję Y4
- Zalety: Nietypowy wygląd drona. Najlepsze właściwości lotne osiąga podczas lotu do przodu. Cena (wymaga mniejszej liczby silników i esc do zbudowania).
- Wady: Konstrukcja asymetryczna. Wymaga użycia serwomechanizmu. Trudności w wykonaniu belki tylnej (ponieważ serwo musi być zamontowane wzdłuż osi). Nie wszystkie kontrolery lotu obsługują tę konfigurację.

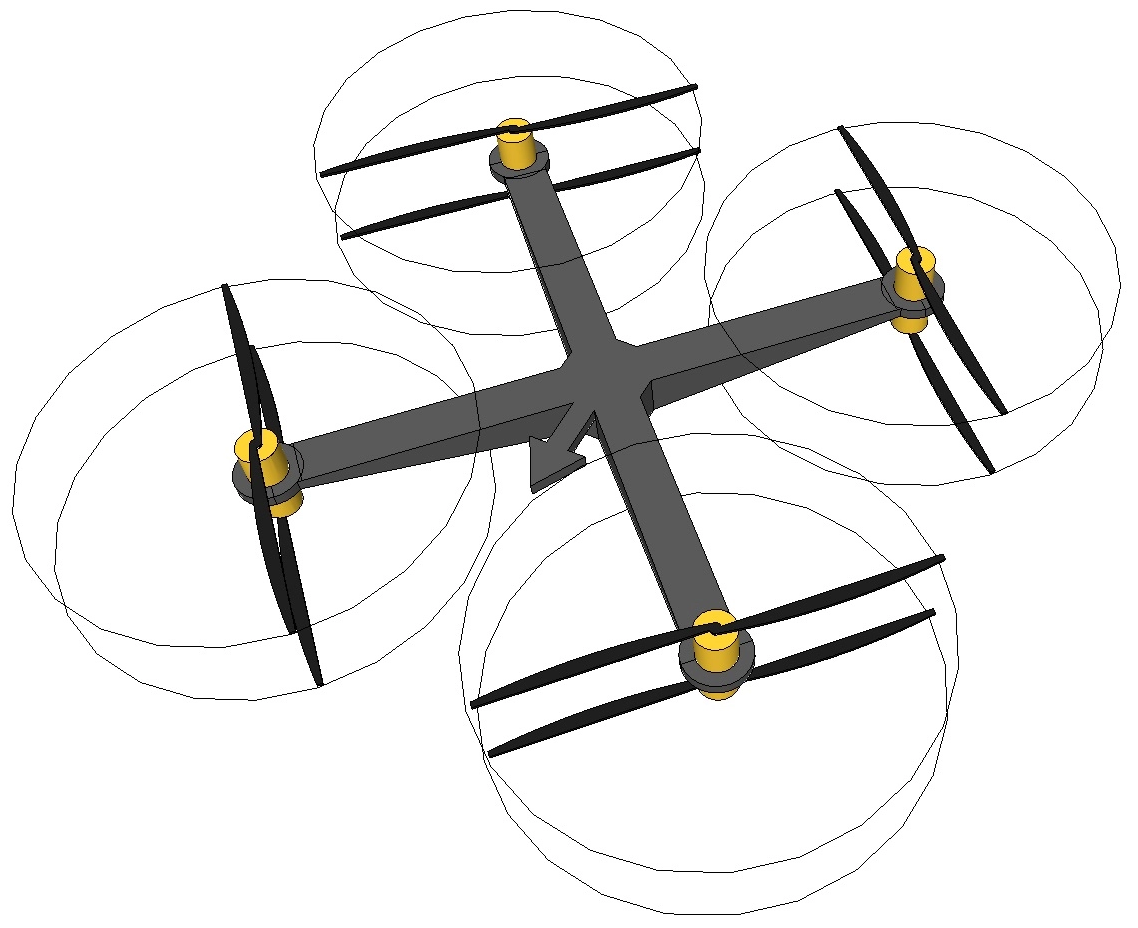
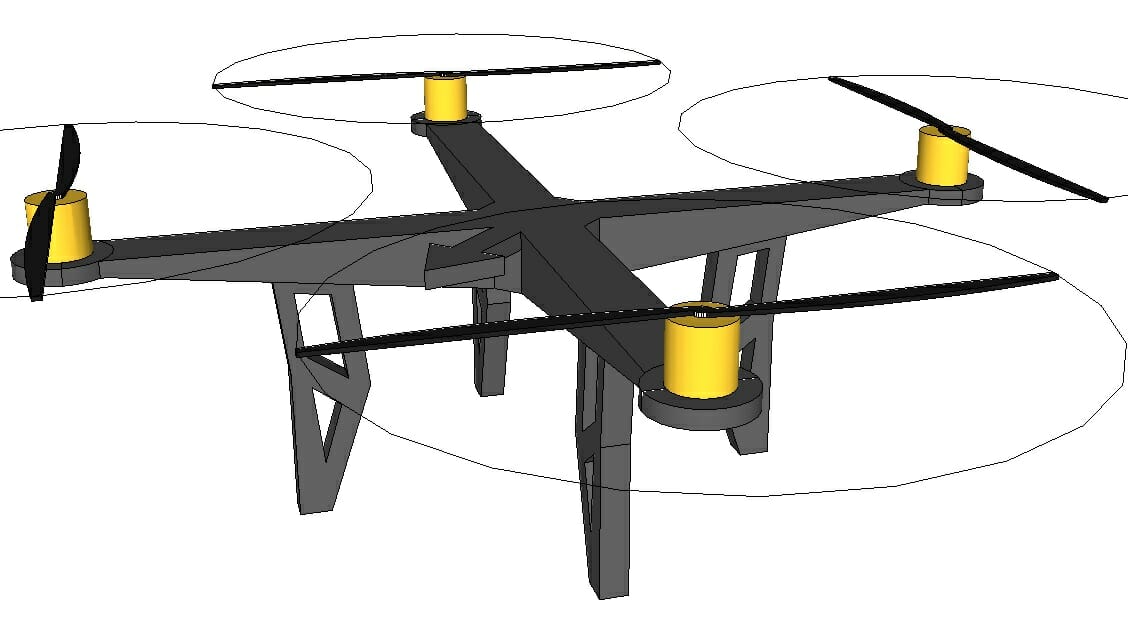
Quadcopter
- Opis: Dron "Quadcopter" posiadający cztery wiązki, z których każdy jest podłączony do silnika. W przypadku „konfiguracji X
- Zalety: Najpopularniejsza konstrukcja wielowirnikowa. Najprostszy i najbardziej wszechstronny projekt. W standardowej konfiguracji ramiona/silniki są symetryczne wokół dwóch osi. Wszystkie kontrolery lotu dostępne na rynku mogą współpracować z tym wielowirnikowym zespołem.
- Wady: Brak redundancji (w przypadku awarii systemu, szczególnie w elementach elektrowni, dron spada).

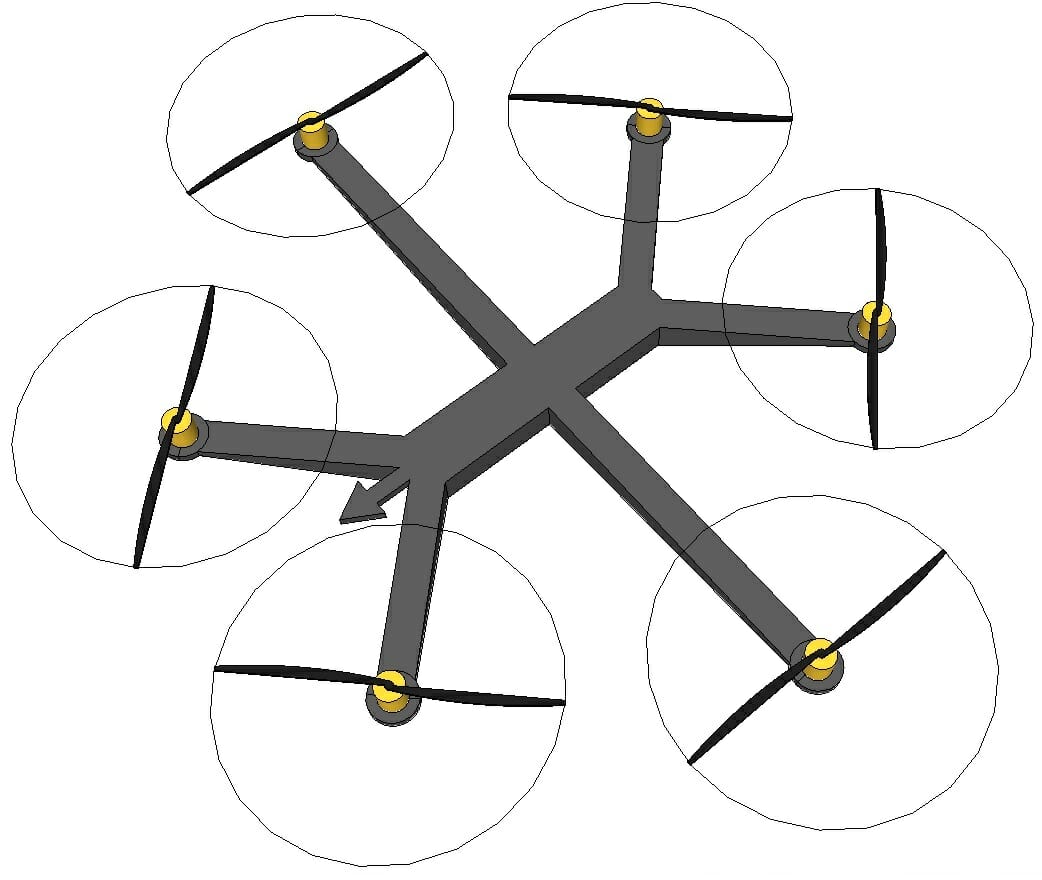
Hexacopter
- Opis: Hexacopter ma sześć wiązek, każda z który jest podłączony do silnika. Przednia część heksakoptera jest uważana za bok połączenia dwóch belek, ale belkę podłużną można również uznać za przednią.
- Zalety: W razie potrzeby konstrukcja heksakoptera pozwala na łatwe dodanie dwóch dodatkowych belek i silników, co zwiększy całkowity ciąg, dzięki czemu dron może unieść większy ładunek. W przypadku awarii jednego z silników możliwe jest, że dron wykona miękkie lądowanie i nie rozbije się. Modułowa konstrukcja ramy. Prawie wszystkie kontrolery lotu obsługują tę konfigurację.
- Wady: Masywna i kosztowna konstrukcja. Dodatkowe silniki i części zwiększają wagę helikoptera, dlatego aby uzyskać taki sam czas lotu jak kwadrokopter, konieczne jest zainstalowanie pojemniejszych akumulatorów.
Y6
- Opis: Konstrukcja Y6 to rodzaj heksakoptera z u podstawy nie sześć belek, ale trzy, z których każda jest połączona z parą silników zamontowanych współosiowo (łącznie 6 silników). Należy zauważyć, że dolne śmigła wystają ciąg w dół.
- Zalety: Mniej komponentów w porównaniu z heksakopterem. Unosi większą ładowność w porównaniu z quadkopterem. Przy zastosowaniu śrub przeciwbieżnych efekt żyroskopowy jest wykluczony, jak w Y3
- Wady: Droższy w porównaniu z quadrocopterem ze względu na użycie dodatkowych części, których koszt jest równoważny częściom heksakoptera. Dodatkowe silniki i części zwiększają wagę drona, co oznacza, że aby uzyskać taki sam czas lotu jak dron, będziesz musiał użyć większej baterii. Jak pokazuje praktyka, ciąg uzyskany na Y6 jest nieco niższy niż w przypadku konwencjonalnego heksakoptera, prawdopodobnie dlatego, że dolny wirnik wpływa na ciąg górnego wirnika. Nie wszystkie kontrolery lotu obsługują tę konfigurację.

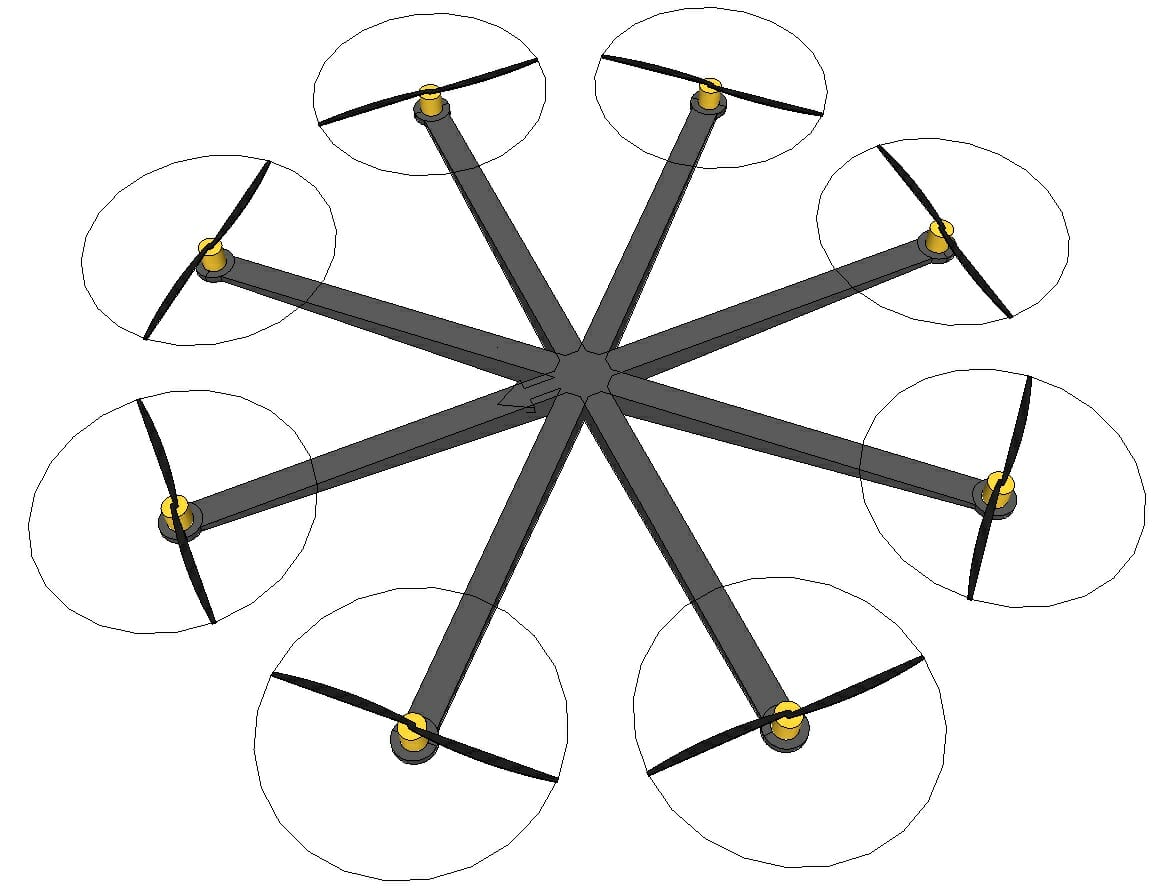
Octocopter
- Opis: Octocopter ma osiem wiązek, z których każda podłączony do silnika. Przednia część heksakoptera jest uważana za stronę połączenia dwóch belek.
- Zalety: Więcej silników = większy ciąg, a tym samym zwiększona redundancja, pozwalająca dronowi pewnie nawigować z ciężkimi i drogimi lustrzankami cyfrowymi.
- Wady: Więcej silników = wyższa cena i większy akumulator. Ze względu na wysoki koszt ma znaczenie tylko w sferze zawodowej.
X8
- Opis: Konstrukcja X8 to nadal oktokopter, tylko nie z ośmioma, ale z czterema belkami, z których każda jest połączona z parą montowanych współosiowo silników (łącznie 8 silników).
- Zalety: Więcej silników = większy ciąg, a tym samym zwiększona redundancja. Bardziej prawdopodobne jest delikatne wylądowanie drona w przypadku awarii silnika.
- Wady: Więcej silników = wyższa cena i większy akumulator. Ze względu na wysoki koszt ma znaczenie tylko dla profesjonalnej dziedziny działalności.
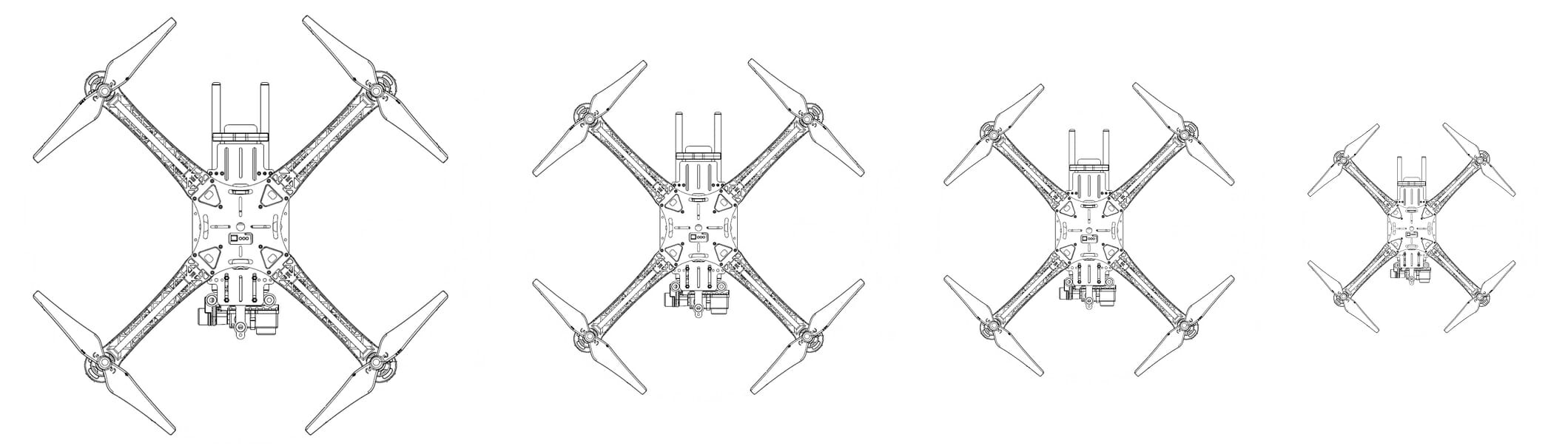
Rozmiar UAV
UAV występują w różnych rozmiarach, od Nano, który jest mniejszy niż dłoń dłoni, do większej, którą można przewozić tylko z tyłu ciężarówki. Dla większości użytkowników, którzy dopiero zaczynają przygodę z dronami, optymalny zakres rozmiarów oferujący największą wszechstronność i wartość wynosi od 350 mm do 700 mm. Rozmiar ramy to średnica największego koła, które przecina każdy z silników. Części do UAV tej wielkości mają szeroki zakres cen i największy dostępny wybór produktów.
Materiały UAV / Budowlane
Poniżej znajdują się najczęściej stosowane materiały wykonawcze do produkcji ram do dronów wielowirnikowych, odpowiednio, lista nie jest kompletna. W idealnym przypadku rama powinna być sztywna i zapewniać jak najmniejszą transmisję drgań.
Kauczuk piankowy (Foam) - jako jedyny materiał do produkcji ram UAV jest rzadko stosowany i co do zasady w połączeniu ze sztywną ramą lub wzmocnioną konstrukcją. Może być również używany do celów strategicznych; jako ochrona wirników (śmigieł), podwozia, często działa jak amortyzator. Guma piankowa może być różnego rodzaju, od miękkiej do stosunkowo twardej.

Drewno – jeśli priorytetem jest taniość konstrukcji, to drewno jest doskonałą opcją, która znacznie zmniejszy czas montażu i produkcji części zamiennych. Drewno jest wystarczająco twarde i jest materiałem sprawdzonym w czasie. Ważne jest, aby do produkcji ramy zastosowano idealnie proste drewno (bez zginania i deformacji).

Plastik - dostępny dla większości użytkowników tylko w postaci arkuszy plastikowych. Ma tendencję do wyginania się i jako taki nie jest idealny. Świetne do robienia klatek bezpieczeństwa lub podwozi. Jeśli zastanawiasz się nad drukiem 3D, powinieneś wziąć pod uwagę przedział czasowy produkcji (może być łatwiej kupić zestaw ramy UAV). Drukowanie części w 3D działało dobrze w przypadku małych quadkopterów.

Aluminium - trafia do konsumenta w różnych kształtach i rozmiarach. Możesz użyć blachy aluminiowej na korpus lub wytłaczanego aluminium na belki drona. Aluminium nie jest tak lekkie jak włókno węglowe czy G10, ale cena i trwałość to główne zalety tego materiału. Zamiast łamać się lub pękać, aluminium ma tendencję do wyginania się. Do pracy z materiałem wymagana jest tylko piła i wiertło.
G10 (rodzaj włókna szklanego) - pomimo tego, że wygląd i podstawowe właściwości są niemal identyczne jak karbon (włókno węglowe) jest materiałem tańszym. Występuje głównie w formacie arkusza i służy do realizacji górnych i dolnych płyt ramowych. Również w przeciwieństwie do włókna węglowego, G10 nie blokuje fal RF.
PCB (Płytka drukowana - płyta dielektryczna) - w rzeczywistości analog włókna szklanego, ale w przeciwieństwie do tego ostatniego są zawsze płaskie. Czasami używane jako górne i dolne płyty ramy, aby zmniejszyć liczbę używanych części (na przykład tablica rozdzielcza mocy jest często wbudowana w dolny panel). Ramki nanopłytki drukowanej
Włókno węglowe jest najbardziej poszukiwanym materiałem ze względu na swoją lekkość i wysoką wytrzymałość. Proces produkcyjny jest nadal wyłącznie ręczny. Z reguły masowo produkowane są proste formy, takie jak arkusze płaskie, elementy rurowe; wykonanie skomplikowanych kształtów trójwymiarowych na zamówienie.
Uwagi dodatkowe
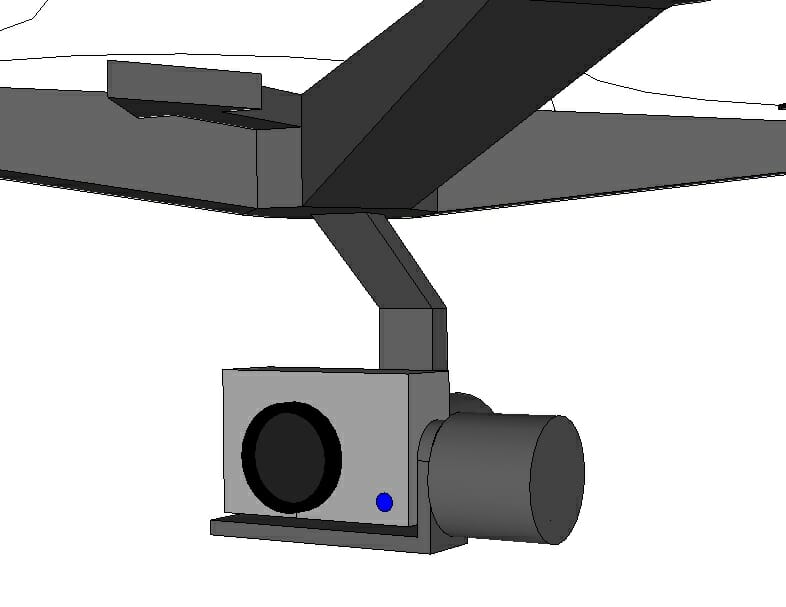
- Gimbal - najczęściej używany do stabilizacji kamery (FPV/ Fotografia lotnicza). Z reguły montowana jest pod ramą zgodnie ze środkiem ciężkości BSP. Możliwość mocowania bezpośrednio do ramy lub za pomocą szyn. Do stabilizacji obrazu zaleca się stosowanie dwu- lub trzyosiowych gimbali. Wymaga zwiększenia długości nóg do lądowania.
- Ładowność (transport) - w sferze amatorskiej to coś z luksusu, więc jak każda dodatkowa waga nie tylko skraca czas lotu, ale także prowadzi do odrzucenia stosowania dodatkowych elementów, które mogłyby nadać dronowi kluczowe funkcje. Przy projektowaniu należy rozumieć, że skrzynia transportowa powinna być jak najlżejsza i jednocześnie wytrzymała, a sam ładunek powinien być sztywno zamocowany, wykluczając jakikolwiek ruch w locie.

- Lądowanie stóp - pomimo tego, że niektóre UAV lądują bezpośrednio na ramie (zazwyczaj są wykluczone w celu zmniejszenia masy), zastosowanie w konstrukcji podpór do lądowania zapewni przerwę między dolną częścią BSP a nierówną powierzchnią, a także w przypadku twardego lądowania, wykonają cios, zwiększając szanse na uratowanie tak ważne elementy drona jak kamera, zawieszenie, akumulator i rama.
- Montaż - pomimo tego, że zaprojektowanie i wykonanie drona jest dużo łatwiejsze niż konwencjonalnego śmigłowca, położenie każdego elementu należy rozważyć na samym początku procesu projektowania.
Ogólne wytyczne montażowe:
- Tworząc ramę od podstaw należy zadbać o dokładne położenie czterech otworów montażowych, przez które silniki są przymocowane do ramy...
- Większość silników do ram o średnicy od 400 mm do 600 mm ma ten sam układ otworów montażowych, co pozwala na użycie ramy od jednego producenta i silników od innego.
- Rozmieszczenie wszystkich dodatkowych elementów powinno być idealnie symetryczne wokół jednej osi, co później ułatwi wyszukiwanie i regulację środka masy drona.
- W idealnym przypadku kontroler lotu powinien znajdować się w środku okręgu (i jako taki w środku masy) łączącego wszystkie silniki.
- Kontroler lotu jest zwykle mocowany do ramy za pomocą rozpórek, gumowych amortyzatorów lub taśmy dwustronnej.
- Wielu producentów stosuje ten sam układ otworów montażowych dla kontrolera lotu (np. kwadrat 35 mm lub 45 mm), ale nie ma aktualnego „standardu branżowego”.
- Bateria jest wystarczająco ciężka i jeśli środek masy zespołu nieznacznie się przesunął, możesz to wyregulować, lekko przesuwając baterię.
- Upewnij się, że mocowanie akumulatora lekko się luzuje, ale jednocześnie zapewnia, że akumulator jest bezpiecznie utrzymywany na swoim miejscu.
- Do zabezpieczenia akumulatora często stosuje się paski na rzepy, jednak dobrym pomysłem jest dodanie taśmy dwustronnej pomiędzy akumulatorem a ramą.

Wytyczne
Krok 1: Zobacz, jakie materiały i narzędzia do ich obróbki są dostępne do Twojej dyspozycji.
- Jeśli Twój arsenał możliwości nie jest wystarczający do wykonania niestandardowej ramy lub po prostu potrzebujesz profesjonalnej ramy, rozważ zakup zestawu ramy do UAV.
- Nawet jeśli rama jest wykonana przy użyciu odpowiednich narzędzi i podstawowych materiałów, nadal może mieć słabości strukturalne powodujące nadmierne wibracje lub przemieszczenia. Proces produkcyjny wymaga dobrego wzroku i doświadczenia.
- Wykonując ramę samodzielnie, zastanów się nad zamocowaniem wszystkich niezbędnych elementów drona; silniki, elektronika itp.
Krok 2: Wymień wszystkie dodatkowe (akcesoria) części, które planujesz dołączyć do zespołu.
- Może to być jedno-, dwu- lub trzyosiowy gimbal do aparatu, spadochron, minikomputer pokładowy, ładowność, elektronika dalekiego zasięgu (z reguły sprawia to, że montaż jest cięższy i większy), sprzęt pływający itp.
- Powstała lista części dodatkowych/pomocniczych da wyobrażenie o wymiarach drona i obliczy masę całkowitą.
Krok 3: Pomyśl o szacowanym rozmiarze ramki.
- Duża rama niekoniecznie jest dużym potencjałem dla drona, a mniejsza rama może nie sprawić, że montaż będzie tańszy.
- Dron zbudowany na ramie o rozmiarze 400 - 600mm jest zalecany dla początkujących.
.Krok 4: Zaprojektuj, zbuduj i przetestuj ramę.
- Jeśli kupiłeś zestaw ramy UAV, to nie musisz się martwić o wytrzymałość, sztywność i konstrukcję.
- Jeśli zdecydujesz się zaprojektować i zbudować ramę od podstaw, ważne będzie sprawdzenie jej wytrzymałości, wagi i upewnienie się, że konstrukcja wytrzyma wibracje (minimalne zginanie).
- Rozważ użycie specjalistycznego oprogramowania do modelowania (wiele jest bezpłatnych, takich jak Google Sketchup), aby zaprojektować ramę i upewnić się, że wymiary są prawidłowe.
Teraz masz ramkę i możesz przejść do następnej lekcji.







