Spis treści
- Dron DIY: Lekcja 1. Terminologia.
- Dron zrób to sam: Lekcja 2. Ramki.
- Dron zrób to sam: Lekcja 3. Elektrownia.
- Dron zrób to sam: Lekcja 4. Kontroler lotu.
- Dron zrób to sam: Lekcja 5. Montaż.
- Dron zrób to sam: Lekcja 6. Kontrola wydajności.
- Dron zrób to sam: Lekcja 7. FPV i dystans.
- Dron własnymi rękami: Lekcja 8. Samoloty.
Wprowadzenie
Po wybraniu lub zbudowaniu ramy następnym krokiem jest wybór odpowiedniego układu napędowego. Ponieważ większość istniejących dronów jest elektryczna, skupimy się na generowaniu czysto elektrycznego napędu za pomocą bezszczotkowych silników prądu stałego. W skład elektrowni wchodzą silniki, wirniki (śmigła, skrócone śmigła), ESC oraz akumulator.
1. Silnik
Od tego, jakich silników użyjesz w swoim zespole, będzie to zależeć od maksymalnego obciążenia, jakie dron może unieść, a także od tego, jak długo może być w locie. Elektrownia musi koniecznie składać się z silników tej samej marki i modelu, takie podejście zapewni jej zrównoważoną pracę. Należy zauważyć, że nawet absolutnie identyczne (Marka/Model) silniki mogą mieć niewielką różnicę w prędkości, która jest następnie niwelowana przez kontroler lotu.
Szczotkowane kontra bezszczotkowe
W silnikach szczotkowych uzwojony wirnik obraca się wewnątrz stojana, na którym magnesy są sztywno zamocowane. W silnikach bezszczotkowych wszystko działa; uzwojenie jest sztywno przymocowane do wnętrza stojana, a magnesy są zamontowane na wale i obracają się. W większości przypadków rozważysz tylko bezszczotkowe silniki prądu stałego (BC). Silniki tego typu są szeroko stosowane w przemyśle radioamatorskim do montażu produktów od helikopterów i samolotów po układy napędowe w samochodach i łodziach.
Bezszczotkowe silniki typu Pancake mają większą średnicę, są bardziej płaskie i generalnie mają wysoki moment obrotowy i niższe KV (szczegóły poniżej). Małe UAV (zwykle wielkości dłoni) często używają małych silników szczotkowych ze względu na ich niższy koszt i prosty dwuprzewodowy sterownik. Chociaż silniki bezszczotkowe są dostępne w różnych rozmiarach i specyfikacjach, wybór mniejszego rozmiaru nie oznacza, że będzie tańszy.

Inrunner vs Outrunner
Istnieje kilka rodzajów bezszczotkowych silników prądu stałego:
- Inrunner to wirnik wewnętrzny. Uzwojenie jest przymocowane do stojana, magnesy są zamontowane na wale wirnika, który się obraca (zwykle stosowany w łodziach RC, helikopterach i samochodach ze względu na wysokie KV).
- Outrunner - wirnik zewnętrzny. Magnesy są przymocowane do stojana, który obraca się wokół uzwojenia stacjonarnego. Dno silnika jest stałe.(z reguły silniki tego typu mają większy moment obrotowy).
- Hybrid Outrunner - Jest to technicznie "Outrunner", ale zaimplementowany w pakiecie "Inrunner". Takie podejście pozwoliło połączyć w jednym typie moment obrotowy „Outrunner” i brak zewnętrznych elementów wirujących jak w silnikach typu „Inrunner”.
KV
Wartość KV - max. liczba obrotów, które silnik może wykonać bez utraty mocy przy danym napięciu. W przypadku większości wielowirnikowych bezzałogowych statków powietrznych istotna jest niska wartość KV (na przykład od 500 do 1000), ponieważ pomaga to zapewnić stabilność. Podczas gdy w lotach akrobatycznych odpowiednia będzie wartość KV pomiędzy 1000 a 1500, w połączeniu z wirnikami (śmigłami) o mniejszej średnicy. Powiedzmy, że wartość KV dla konkretnego silnika wynosi 650 obr/min, wtedy przy napięciu 11,1 V silnik będzie się obracał z prędkością: 11,1 × 650 = 7215 obr/min, a jeśli użyjesz silnika na niższym napięciu (powiedzmy 7,4 V), to prędkość obrotowa wyniesie: 7,4 × 650 = 4810 obr/min. Należy jednak pamiętać, że stosowanie niskiego napięcia oznacza ogólnie wyższe zużycie prądu (Moc = Prąd × Napięcie).
Ciąg
Niektórzy producenci silników bezszczotkowych mogą podać w specyfikacji informacje o maksymalnym możliwym ciągu (ciągu) generowanym przez silnik w połączeniu z zalecanym wirnikiem głównym. Jednostką miary ciągu jest zwykle kilogram (Kg / Kg), funt (Lbs) lub Newton (N). Na przykład, jeśli budujesz kwadrokopter i znasz wartość ciągu pojedynczego silnika = do 0,5kg w komorze z 11-calowym wirnikiem, to na wyjściu cztery takie silniki mogą być podnoszone z maksymalnym ciągiem: 0,5kg × 4 = 2kg. W związku z tym, jeśli całkowita waga twojego quadkoptera jest nieco mniejsza niż 2 kg, to z taką elektrownią wystartuje tylko przy maksymalnych obrotach (maksymalny ciąg). W takim przypadku istotne będzie albo wybranie mocniejszej wiązki silników wirnika, która zapewni większy ciąg, albo zmniejszenie całkowitej masy drona. Przy max. siła ciągu elektrowni = 2kg, waga drona nie powinna przekraczać połowy tej wartości (1kg, wliczając wagę samych silników). Podobne obliczenia można wykonać dla dowolnej konfiguracji. Załóżmy, że waga heksakoptera (łącznie z ramą, silnikami, elektroniką, akcesoriami itp.) wynosi 2,5 kg. Oznacza to, że każdy silnik do takiego zespołu musi zapewniać (2,5kg ÷ 6 silników) × 2 = 0,83kg ciągu (lub więcej). Teraz wiesz, jak obliczyć optymalny ciąg silników na podstawie masy całkowitej, ale przed podjęciem decyzji sugerujemy zapoznanie się z poniższymi sekcjami.
Uwagi dodatkowe
- Złącza: Silniki szczotkowe na prąd stały mają dwa złącza „” i „-”. Zmiana przewodów miejscami zmienia kierunek obrotów silnika.
- Złącza: Bezszczotkowe silniki prądu stałego mają trzy złącza. Aby dowiedzieć się, jak je połączyć, a także jak zmienić kierunek obrotów, zapoznaj się z sekcją ESC poniżej.
- Uzwojenia: Uzwojenia wpływają na KV silników. Jeśli potrzebujesz najniższej wartości KV, ale priorytetem jest moment obrotowy, najlepiej zwrócić uwagę na bezszczotkowe silniki prądu stałego typu Pancake.
- Montaż: Większość producentów posiada ogólny schemat okablowania silników prądu stałego do silników prądu stałego, który pozwala producentom ramek uniknąć tworzenia tak zwanych adapterów. Szablon jest zwykle metryczny, z dwoma otworami oddalonymi od siebie o 16 mm i dwoma kolejnymi otworami oddalonymi od siebie o 19 mm (90° do pierwszego).
- Gwint: Gwint montażowy używany do mocowania silnika bezszczotkowego do ramy może się różnić. Zwykłe rozmiary metryczne śrub to M1, M2 i M3, rozmiary imperialne mogą wynosić 2-56 i 4-40.
2. Wirniki główne (Śmigła)
Wirniki główne (śmigła, w skrócie śmigła) wielowirnikowych UAV pochodzą ze śmigieł samolotów sterowanych radiowo. Wielu zapyta: dlaczego nie użyć łopat helikoptera? Mimo że zostało to już zrobione, wyobraź sobie wymiary heksakoptera z łopatami helikoptera. Warto również zauważyć, że system śmigłowca wymaga zmiany skoku łopat, a to znacznie komplikuje konstrukcję.
Możesz również zapytać, dlaczego nie użyć silnika turboodrzutowego, silnika turbowentylatorowego, turbośmigłowego itp.? Z pewnością są niesamowicie dobre w dostarczaniu dużej siły ciągu, ale wymagają też dużo energii. Jeśli głównym celem drona jest poruszanie się bardzo szybko, a nie unoszenie się w ograniczonej przestrzeni, jeden z powyższych silników może być dobrym rozwiązaniem.
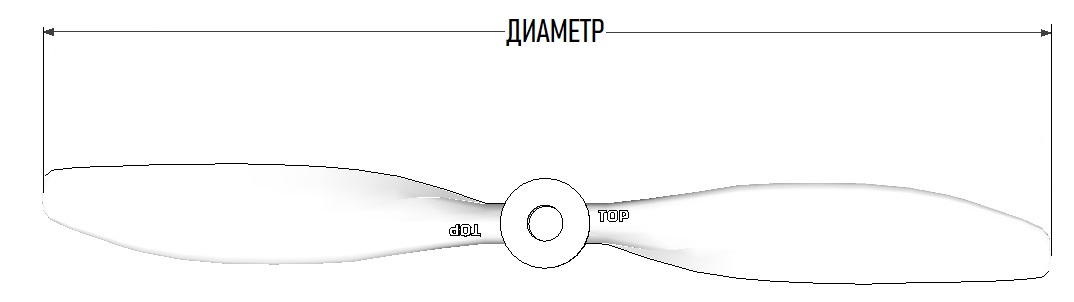
Łopaty i średnica
Główny wirnik większości wielowirnikowych UAV ma dwie lub trzy łopaty. Najczęściej używane śmigła mają dwie łopaty. Nie zakładaj, że dodanie większej liczby ostrzy automatycznie zwiększy siłę ciągu; każda łopatka pracuje w przepływie zakłóconym przez poprzednią łopatkę, zmniejszając wydajność śmigła. Główny wirnik o małej średnicy ma mniejszą bezwładność, dzięki czemu łatwiej jest przyspieszać i zwalniać, co jest ważne przy lotach akrobatycznych.

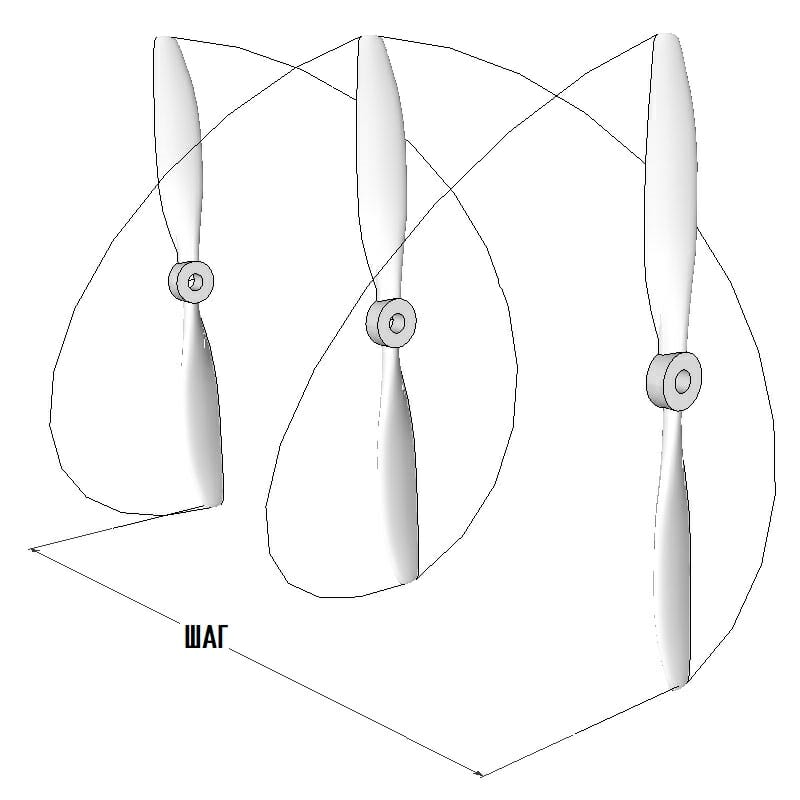
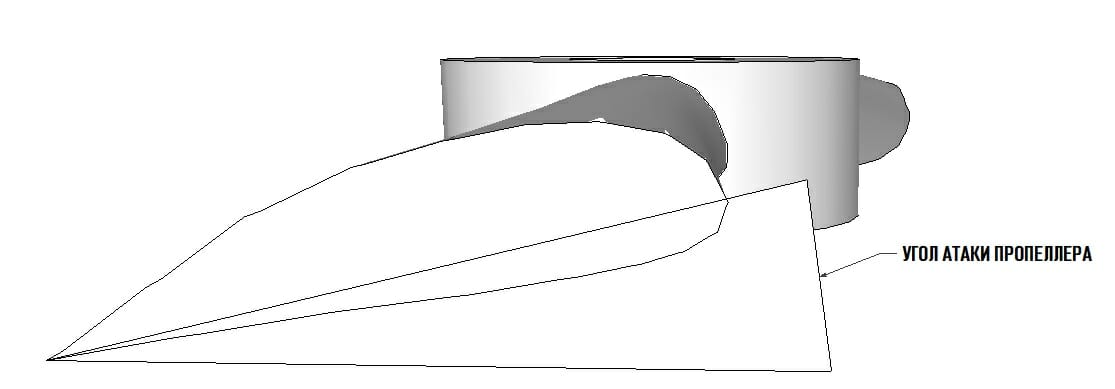
Skok / Kąt natarcia / Skuteczność / Pchnięcie
Pchnięcie generowane przez wirnik główny zależy od gęstości powietrza, liczby obrotów śmigła, jego średnicy, kształtu i powierzchni łopatek, a także jego skoku. Sprawność śmigła jest związana z kątem natarcia, który jest definiowany jako skok łopaty minus kąt spirali (kąt między wypadkową prędkością względną a kierunkiem obrotu łopaty). Sama sprawność to stosunek mocy wyjściowej do mocy wejściowej. Większość dobrze zaprojektowanych śmigieł ma sprawność ponad 80%. Na kąt natarcia ma wpływ prędkość względna, więc śmigło będzie miało różną wydajność przy różnych prędkościach silnika. Na wydajność duży wpływ ma również krawędź natarcia głównej łopaty wirnika i bardzo ważne jest, aby była jak najbardziej gładka. Chociaż konstrukcja o zmiennym skoku byłaby najlepsza, dodatkowa złożoność wymagana w porównaniu z nieodłączną prostotą wielowirnikowca oznacza, że prawie nigdy nie stosuje się śmigła o zmiennym skoku.
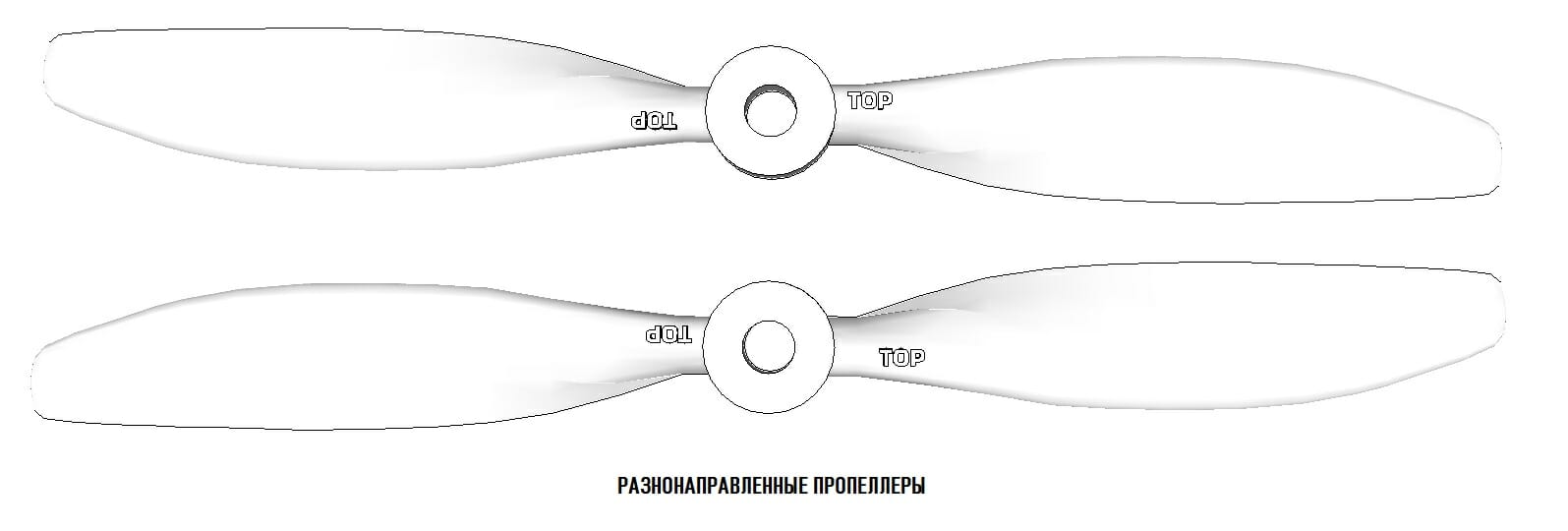
Obrót
Wirniki są przeznaczone do obrotu w prawo (CW) lub w lewo (CCW). Kierunek obrotu jest wskazywany przez pochylenie łopatki ( patrz śmigło od końcaVtailY6X8
Materiały wykonawcze
Materiały użyte do produkcji wirników (śmigieł) mogą mieć umiarkowany wpływ na lot wydajność, ale bezpieczeństwo powinno być najwyższym priorytetem, zwłaszcza jeśli jesteś początkującym i niedoświadczonym.
- Plastik (ABS/Nylon itp.) to najpopularniejszy wybór, jeśli chodzi o wielosilnikowe bezzałogowce. Wynika to w dużej mierze z niskiego kosztu, przyzwoitej charakterystyki lotu i wykładniczej trwałości. Zazwyczaj w razie wypadku co najmniej jedno śmigło jest zepsute, a kiedy opanujesz drona i nauczysz się latać, zawsze będziesz mieć wiele uszkodzonych śmigieł. Sztywność i odporność na uderzenia plastikowej śruby można poprawić poprzez wzmocnienie włóknem węglowym (węgiel), takie podejście wynosi max. skuteczne i nie tak drogie w porównaniu z pełnoprawnym śmigłem z włókna węglowego.
- Polimer wzmocniony włóknem (włókno węglowe, nylon wzmocniony włóknem węglowym itp.) - to „zaawansowana” technologia w wielu relacjach. Części z włókna węglowego wciąż nie są łatwe w produkcji, dlatego płaci się za nie więcej niż za zwykłą plastikową śrubę o podobnych parametrach. Śmigło wykonane z włókna węglowego jest trudniejsze do złamania lub zgięcia, dlatego w razie zderzenia spowoduje większe uszkodzenia wszystkiego, z czym się zetknie. Jednocześnie śmigła z włókna węglowego są ogólnie dobrze wykonane, sztywniejsze (zapewniają minimalną utratę wydajności), rzadko wymagają wyważenia i są lżejsze niż jakikolwiek inny materiał. Zaleca się rozważenie takich śmigieł dopiero wtedy, gdy poziom pilotażu użytkownika stanie się komfortowy.
- Drewno jest rzadko stosowanym materiałem do produkcji wielowirnikowych wirników BSP, ponieważ ich produkcja wymaga obróbki mechanicznej, co później sprawia, że śmigła drewniane są droższe niż plastikowe. Jednocześnie drzewo jest dość mocne i nigdy się nie ugina. Należy pamiętać, że drewniane śmigła są nadal używane w samolotach sterowanych radiowo.



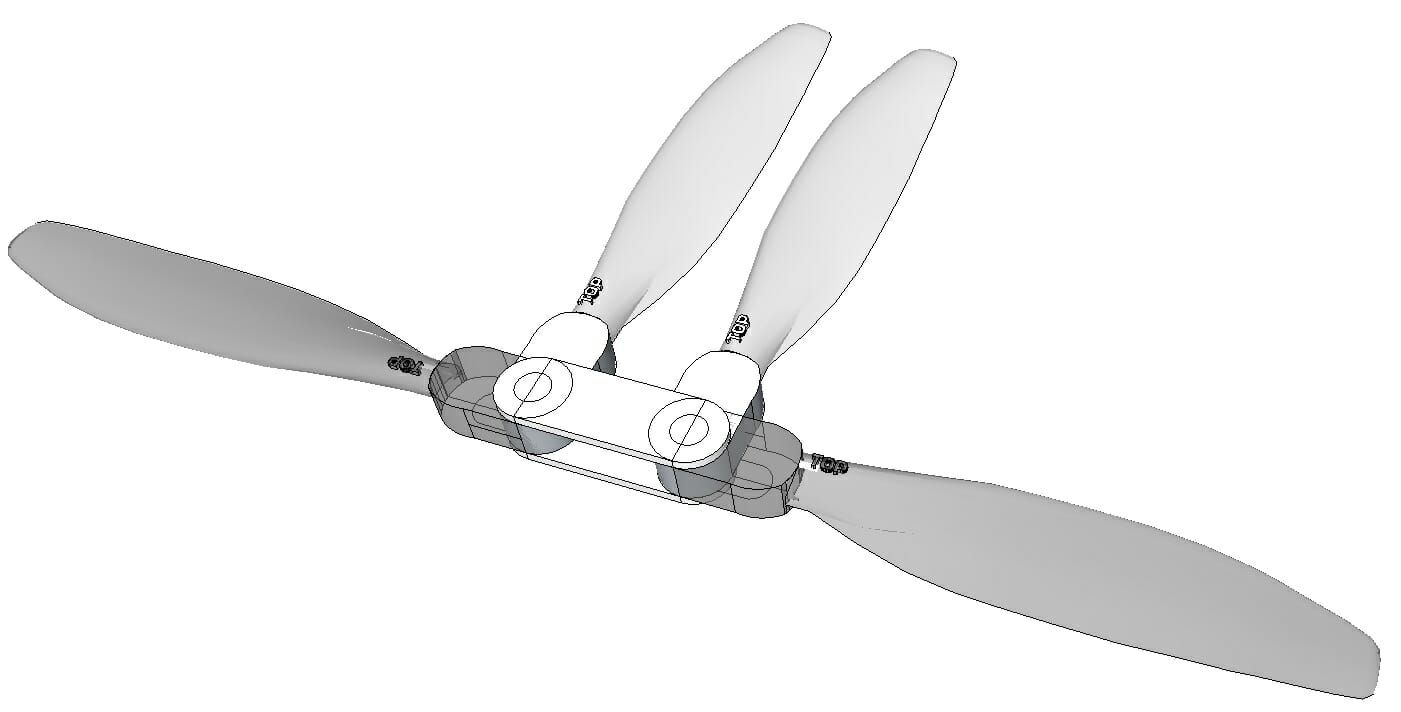
Składane
Składane podpory posiadają część środkową, która łączy się z dwoma obrotowymi łopatkami. Kiedy środek (który jest połączony z wałem wyjściowym silnika) obraca się, siły odśrodkowe działają na łopatki, wypychając je na zewnątrz i zasadniczo usztywniając śmigło, z takim samym efektem jak klasyczne śmigło nieskładane. Ze względu na niski popyt i dużą liczbę wymaganych części, składane śmigła są mniej powszechne. Główną zaletą składanych podpór jest kompaktowość, a w połączeniu ze składaną ramą wymiary transportowe drona mogą być znacznie mniejsze niż wymiary lotu. Dodatkowym atutem mechanizmu składania jest brak konieczności całkowitej wymiany śmigła w razie wypadku, wystarczy wymienić tylko uszkodzoną łopatkę.
Instalacja
Podobnie jak UAV, wirniki mogą mieć szeroki zakres rozmiarów. Dlatego w przemyśle istnieje szereg „standardowych” średnic wałów silnika. W związku z tym wirnik główny często dostarczany jest z niewielkim zestawem pierścieni adaptacyjnych (wyglądają one jak podkładki z otworami o różnej średnicy w środku), które są montowane w otworze środkowym śmigła
Śrubę można przymocować do silnika w zależności od metody montażu obsługiwanej przez silnik. Jeśli wał silnika nie daje możliwości mocowania (połączenie gwintowane, różne urządzenia mocujące itp.), stosuje się specjalne adaptery, takie jak śmigła i tuleje zaciskowe.
- Propsaver
- Collet chuck
Silniki bezszczotkowe z zewnętrznym wirnikiem (typu „Outrunner”) mają z reguły w górnej jego części kilka gwintowanych otworówto równie popularna opcja mocowania śmigła do wału silnika BC. Wał takiego silnika ma na końcu gwint, którego kierunek jest przeciwny do kierunku obrotu wirnika. Takie podejście eliminuje samoistne luzowanie się nakrętki mocującej, zapewniając bezpieczną i niezawodną pracę drona.
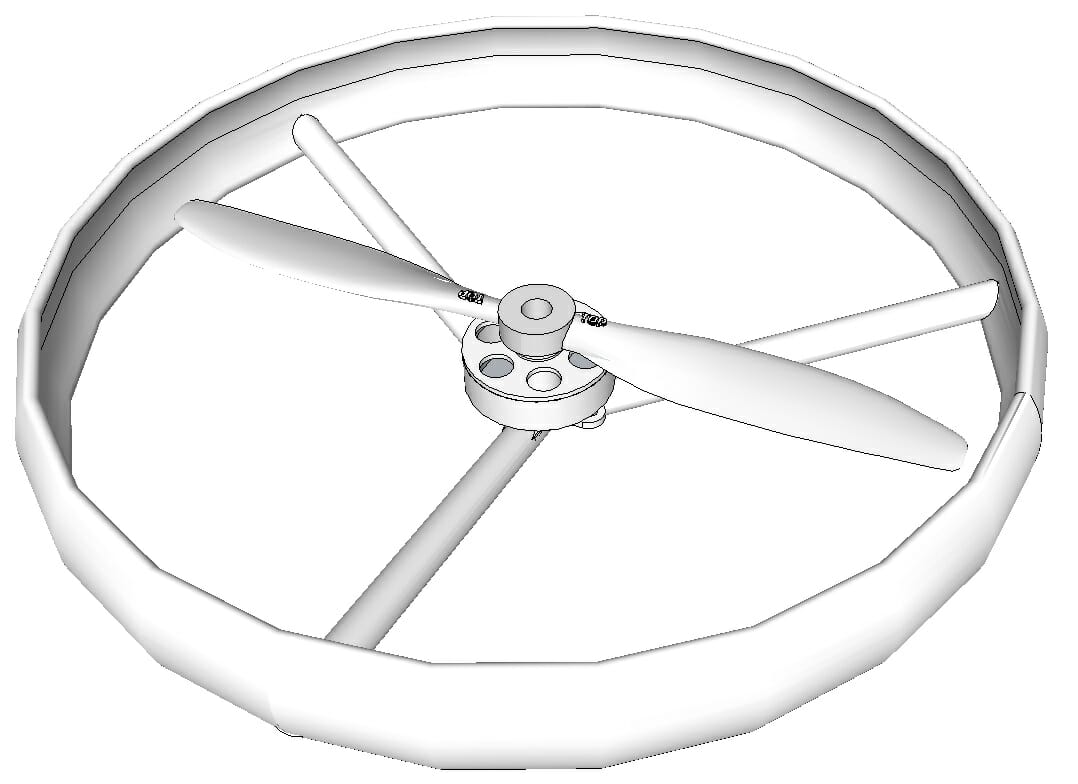
Zabezpieczenie wirników
Zabezpieczenie wirników - zaprojektowane tak, aby wykluczyć bezpośredni kontakt elektrowni UAV z nadjeżdżającym obiektem, zachowując tym samym jego integralność i sprawność oraz aby zapobiec obrażeniom o szybko obracające się śmigła w wyniku kolizji z ludźmi i zwierzętami. Osłony śmigieł są przymocowane do ramy głównej. W zależności od wersji może częściowo zachodzić na obszar roboczy elektrowni lub całkowicie (ochrona pierścieniowa). Ochrona śmigła jest najczęściej stosowana w małych (zabawkowych) UAV. Zastosowanie elementów ochronnych w montażu niesie ze sobą również szereg kompromisów, wśród których:
- Może powodować nadmierne drgania.
- Generalnie wytrzymuje lekkie uderzenia.
- Może zmniejszać ciąg, jeśli pod śrubą znajduje się zbyt wiele nóżek montażowych.
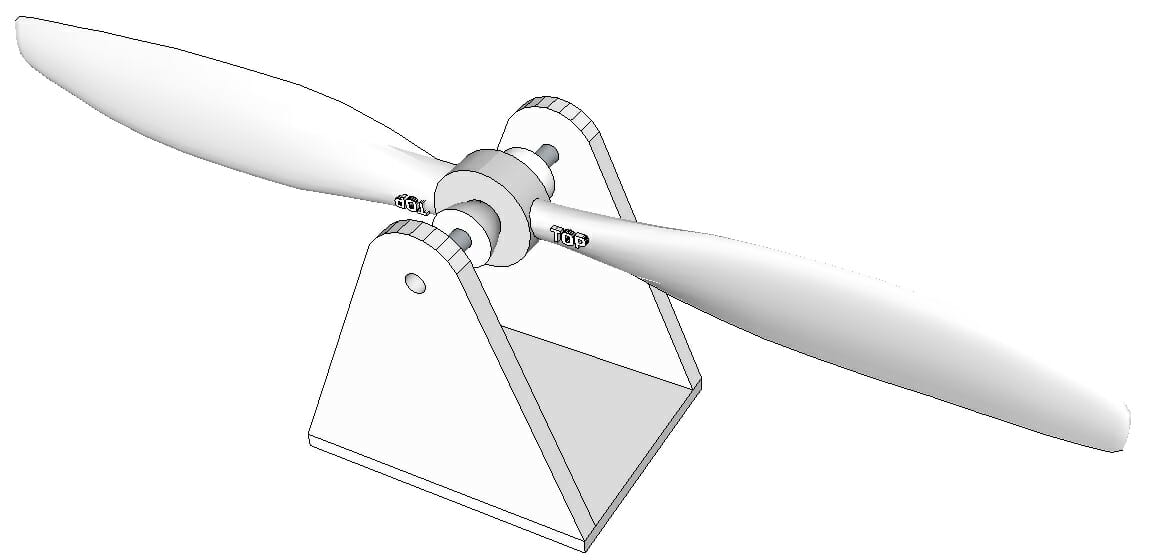
Wyważanie
Słabe wyważenie występuje w większości niedrogich śmigieł. Aby się o tym upewnić, nie musisz daleko iść, wystarczy włożyć ołówek w centralny otwór śruby (z reguły przy niewyważeniu jedna strona będzie cięższa od drugiej). Dlatego zdecydowanie zaleca się wyważenie rekwizytów przed zainstalowaniem ich na silnikach. Niewyważone śmigło spowoduje nadmierne drgania, co z kolei negatywnie wpłynie na pracę kontrolera lotu (objawiające się nieprawidłowym zachowaniem drona w locie), nie wspominając o zwiększeniu hałasu, zwiększonym zużyciu elementów elektrowni i pogorszeniu jakości zawieszonej kamery.
Śmigło można równoważyć na różne sposoby, ale jeśli budujesz drona od podstaw, to w arsenale narzędzi musi być niedrogi wyważarka śmigła, która pozwala łatwo i prosto określić niewyważenie ciężaru w śmigle. Aby wyrównać wagę, można albo zeszlifować najcięższą część śmigła (centralna część łopatki jest równomiernie wyszlifowana, a w żadnym wypadku nie odciąć części śmigła), można też zrównoważyć przyklejając kawałek taśmy (cienkiej) na lżejszym ostrzu (równomiernie dodawaj segmenty, aż do osiągnięcia równowagi). Zwróć uwagę, że im dalej od środka dokonasz modernizacji wyważenia (szlifowanie lub dodanie paska) śmigła, tym większy będzie efekt oparty na zasadzie momentu obrotowego.
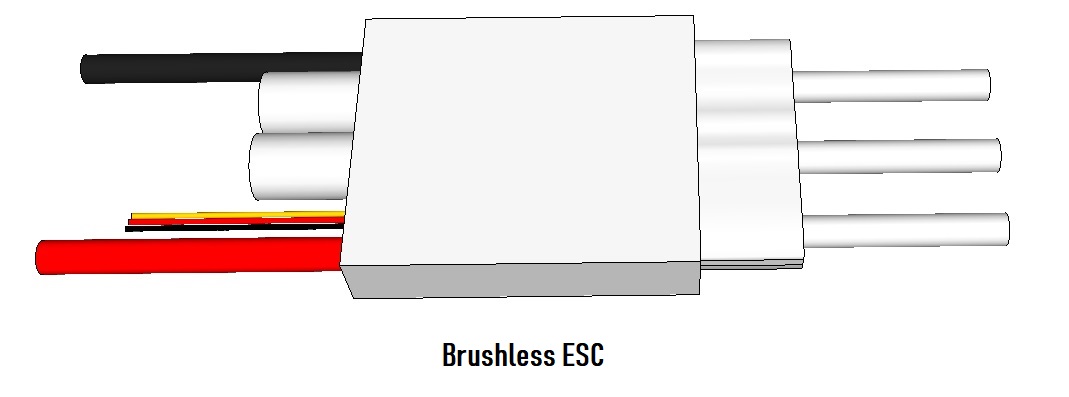
3. ESC
ESC (angielski elektroniczny regulator prędkości; rus.elektroniczny regulator prędkości) - umożliwia kontrolerowi lotu sterowanie prędkością i kierunkiem silnika. Przy prawidłowym napięciu ESC musi wytrzymać max. prąd, który silnik może zużywać, a także ogranicza prąd przepływający przez fazę podczas przełączania. Większość dronów hobbystycznych ESC pozwala silnikowi obracać się tylko w jednym kierunku, jednak przy odpowiednim oprogramowaniu mogą działać w obu kierunkach.
Połączenie
Początkowo ESC może być mylące, ponieważ dostępnych jest kilka przewodów / pinów / złączy do podłączenia. boki (ESC może być wyposażony w złącza lutowane lub bez).
- Zasilanie: Dwa grube przewody (zwykle czarny i czerwony) służą do zasilania z tablicy rozdzielczej/wiązki, do której zasilanie jest dostarczane bezpośrednio z głównej baterii samolotu.
- 3 złącza: Trzy złącza są dostępne po przeciwnej stronie kontrolera do podłączenia do trzech złączy pociskowych (zwykle dostarczanych z silnikami) na silniku bezszczotkowym. Zastosowanie złącz przy podłączaniu ESC pozwala w razie potrzeby (w przypadku awarii) na szybką zmianę sterownika bez użycia lutownicy. Zdarza się, że złącza w kształcie kuli dołączone do silnika nie pasują do złącz na regulatorze, w takim przypadku wystarczy wymienić je na odpowiednie. Który z trzech to „plus”, a który „minus”? Punktem odniesienia jest prosty, wychodzący dodatni przewód z akumulatora, przechodzi w dodatni na ESC, podobnie z minusem.
- 3-pinowe złącze serwo R/C z cienkimi przewodami: przez które przetwarzany jest sygnał pochodzący z odbiornika z czego jeden przewód jest sygnałem (transmisja sygnału gazu do ESC lub wejście), drugi „Minus” (lub uziemienie) i przewód dodatni (nie używany, jeśli nie ma wbudowanego BEC; z wbudowanym BEC jest to wyjście zasilania 5 V, które później można wykorzystać do zasilania elektronika pokładowa).
BEC
We wczesnych dniach modelowania samolotów jako elektrownia wykorzystywany był silnik spalinowy, a elektronika pokładowa była zasilana przez niewielki bateria. Wraz z pojawieniem się trakcji elektrycznej i sterowników (ESC), w tych ostatnich zaczęto obejmować tak zwany obwód eliminacji baterii - BEC (po angielsku. Battery Eliminator Circuit; lub pokładowy konwerter zasilania; z reguły zapewnia dodatkowe źródło prądu o napięciu 5V przy prądzie 1A lub wyższym). Innymi słowy jest to konwerter napięcia zastosowany w zespole LiPo na napięcie do zasilania elektroniki pokładowej drona.
Podczas montażu wielowirnikowca wszystkie ESC muszą być podłączone do kontrolera lotu, ale wymagany jest tylko jeden BEC, w przeciwnym razie mogą pojawić się problemy podczas zasilania tych samych linii. Ponieważ zwykle nie ma możliwości wyłączenia BEC w ESC, najlepiej usunąć czerwony przewód () i owinąć go taśmą elektryczną dla wszystkich ESC oprócz jednego. Ważne jest również pozostawienie czarnego przewodu (masy) dla wspólnego uziemienia.
Firmware
Nie wszystkie ESC na rynku są równie dobre do zastosowań wielowirnikowych. Ważne jest, aby zrozumieć, że przed pojawieniem się wielosilnikowych bezzałogowych statków powietrznych silniki bezszczotkowe były wykorzystywane przede wszystkim jako elektrownia samochodów, samolotów i śmigłowców sterowanych radiowo. Większość z nich nie wymaga szybkich czasów odpowiedzi ani aktualizacji. ESC z wbudowanym oprogramowaniem SimonK lub BLHeli są w stanie bardzo szybko reagować na nadchodzące zmiany, co generalnie stanowi różnicę między stabilnym lotem a katastrofą.
Dystrybucja zasilania
Ponieważ każdy ESC jest zasilany z głównej baterii, złącze głównej baterii musi być jakoś podzielone na cztery ESC. Odbywa się to za pomocą Power Distribution BoardPower Distribution HarnessDziekani
4. Bateria
Chemia
Baterie stosowane w bezzałogowych statkach powietrznych są obecnie wyłącznie polimerem litu (LiPo), a skład niektórych z nich jest dość egzotyczny – lit mangan lub inny lit warianty. Kwas ołowiowy po prostu nie jest odpowiedni, a NiMh / NiCd są nadal zbyt ciężkie w stosunku do ich pojemności i często nie zapewniają wymaganych wysokich szybkości rozładowania. LiPo oferuje wysoką wydajność i szybkość rozładowania przy niewielkiej wadze. Wadą są stosunkowo wysokie koszty i ciągłe problemy z bezpieczeństwem (zagrożenie pożarowe).
Napięcie
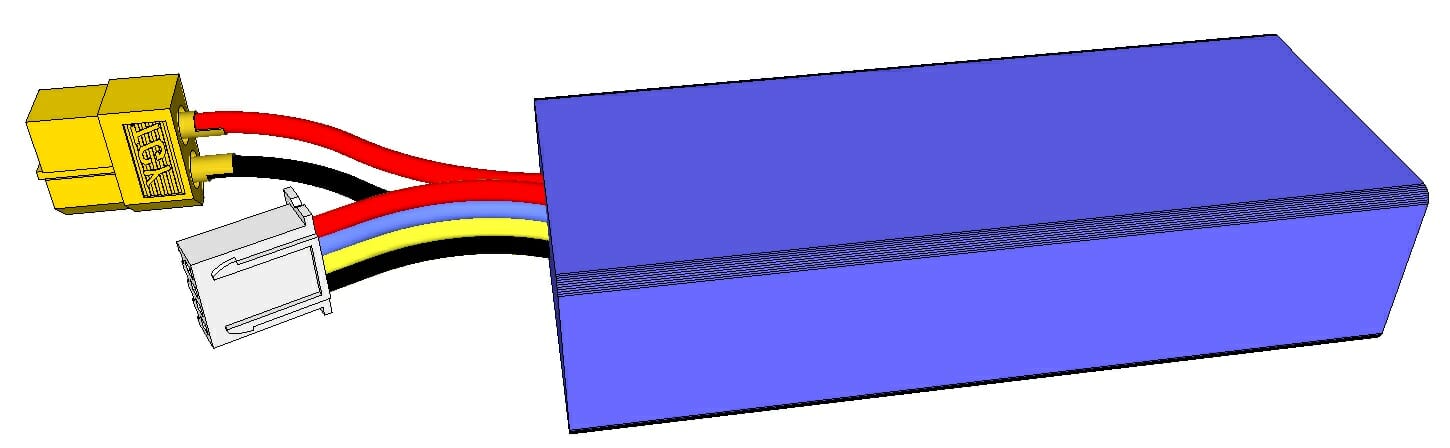
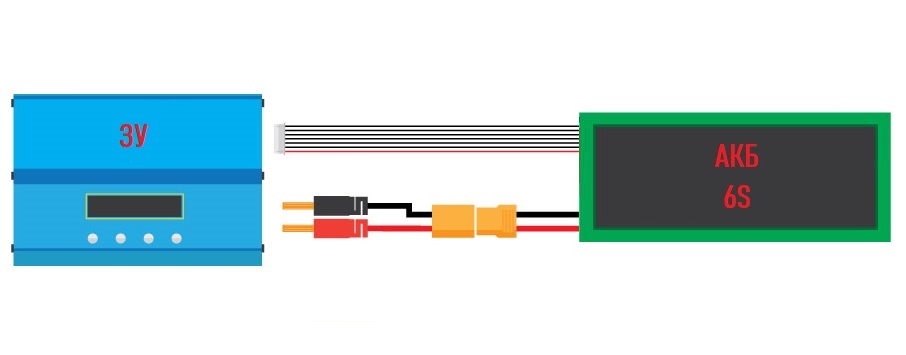
W praktyce wystarczy jedna bateria do BSP. Napięcie tego akumulatora musi odpowiadać wybranym silnikom BK. Prawie wszystkie używane obecnie baterie są oparte na litu i zawierają kilka ogniw (puszki) o napięciu 3,7 V każda, gdzie 3,7 V = 1 S (tzn. bateria jednopuszkowa; 2 S to dwie puszki itp.). Dlatego bateria oznaczona 4S prawdopodobnie będzie miała wartość nominalną 4 × 3,7 V = 14,8 V. Również liczba puszek pomoże ci określić, której ładowarki użyć. Należy pamiętać, że bateria jednoogniwowa o dużej pojemności może fizycznie wyglądać jak bateria wieloogniwowa o małej pojemności.
Pojemność
Pojemność akumulatora mierzona jest w amperogodzinach (Ah). Małe baterie mogą mieć pojemność 0,1 Ah (100 mAh), pojemność baterii dla średnich dronów może wynosić od 2-3 Ah (2000 mAh - 3000 mAh). Im wyższa pojemność, tym dłuższy czas lotu i odpowiednio cięższy akumulator. Czas lotu konwencjonalnego UAV może mieścić się w granicach 10-20 minut, co może wydawać się krótkotrwałe, ale należy zrozumieć, że dron podczas lotu nieustannie zmaga się z grawitacją i w przeciwieństwie do samolotu nie ma powierzchni (skrzydełka), które zapewniają pomoc w postaci optymalnej siły nośnej.
Szybkość rozładowania
Szybkość rozładowania baterii litowej jest mierzona w „C”, gdzie 1C to pojemność baterii (zwykle w amperogodzinach, chyba że rozważasz drona o wielkości Palma). Szybkość rozładowania większości akumulatorów LiPo wynosi co najmniej 5C (pięciokrotność pojemności), ale ponieważ większość silników stosowanych w wielowirnikowych bezzałogowcach pobiera dużo prądu, akumulator musi być w stanie rozładowywać się niewiarygodnie wysokim prądem, który zwykle jest około 30A lub więcej.
Bezpieczeństwo
Akumulatory LiPo nie są całkowicie bezpieczne, ponieważ zawierają wodór pod ciśnieniem i mają tendencję do spalania i/lub wybuchu gdy coś jest nie tak. Jeśli więc masz jakiekolwiek wątpliwości co do stanu akumulatora, w żadnym wypadku nie podłączaj go do drona ani nawet do ładowarki – uznaj go za „wycofany z eksploatacji” i odpowiednio go zutylizuj. Znakami ostrzegawczymi, że coś jest nie tak z baterią, są wgniecenia lub obrzęki (np. wyciek gazu). Do ładowania akumulatora LiPo najlepiej używać sejfu LiPo (sejf na baterie). Przechowywanie baterii

Ładowanie
Większość akumulatorów LiPo ma dwa złączaŁadowarkakwestie bezpieczeństwa związane z akumulatorami litowo-polimerowymi
.Mocowanie
Akumulator jest najcięższym elementem drona, dlatego należy go montować w martwym punkcie środkowym, aby zapewnić takie samo obciążenie silników. Akumulator nie wymaga żadnego specjalnego mocowania (zwłaszcza wkrętów samogwintujących, które mogą uszkodzić LiPo i wywołać pożar), więc niektóre obecnie stosowane metody mocowania to paski na rzepy, gumowe, plastikowe przegródki i inne. Najpopularniejszą opcją montażu baterii jest podwieszenie baterii pod ramą za pomocą paska na rzep.







