Spis treści
- Dron DIY: Lekcja 1. Terminologia.
- Dron zrób to sam: Lekcja 2. Ramki.
- Dron zrób to sam: Lekcja 3. Elektrownia.
- Dron zrób to sam: Lekcja 4. Kontroler lotu.
- Dron zrób to sam: Lekcja 5. Montaż.
- Dron zrób to sam: Lekcja 6. Kontrola wydajności.
- Dron zrób to sam: Lekcja 7. FPV i dystans.
- Dron własnymi rękami: Lekcja 8. Samoloty.
Wprowadzenie
W Lekcji 5 trzeba było zakończyć składanie drona (bez instalowania śmigieł). Nie spiesz się, ponieważ nawet drobne błędy mogą doprowadzić do awarii. Przed pierwszym lotem masz jeszcze kilka kroków, więc bądź cierpliwy i postępuj zgodnie z poniższymi wskazówkami. Podobnie jak w poprzedniej lekcji, nadal będziemy zakładać, że do interakcji z UAV używasz sprzętu do sterowania radiowego (jako obecnie najczęściej stosowana metoda sterowania).
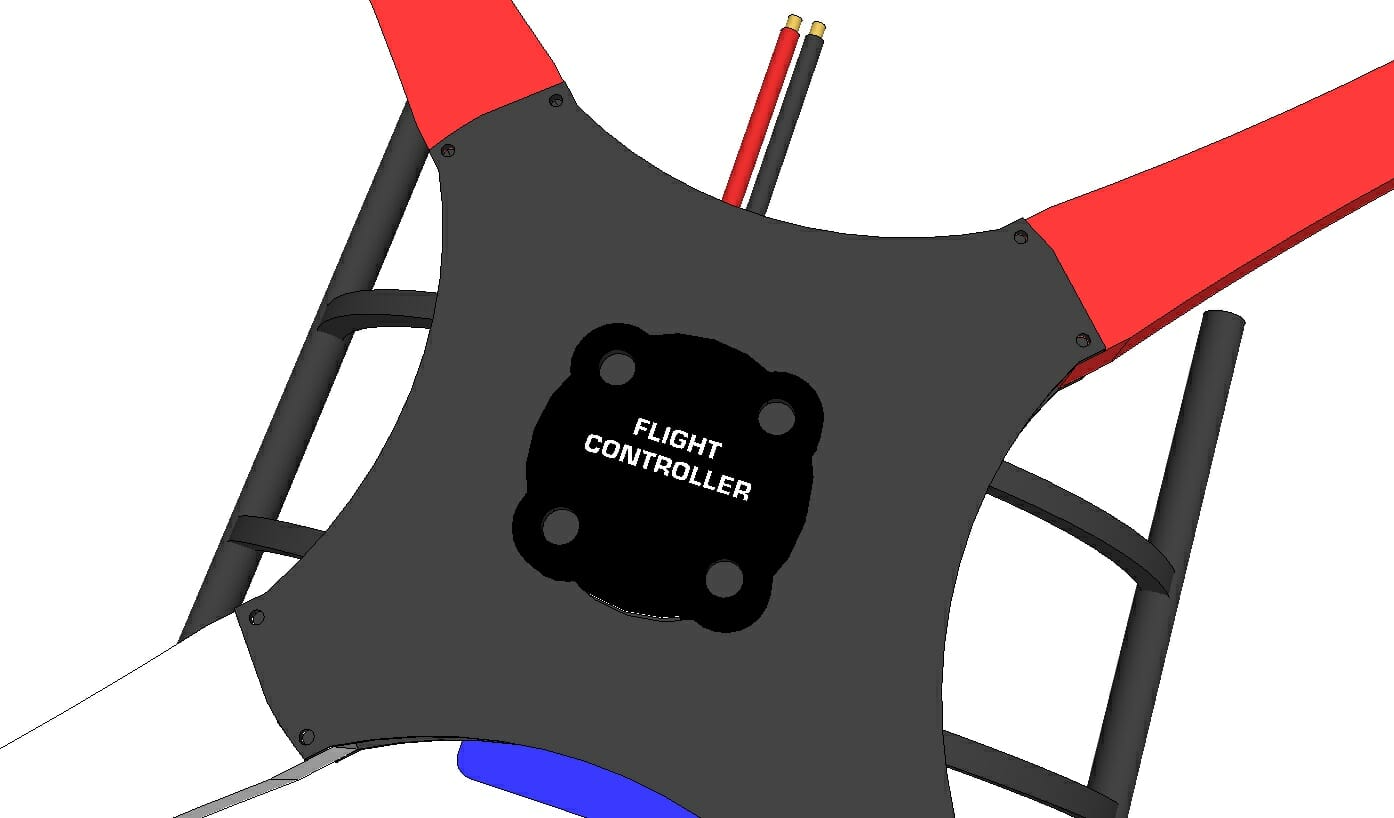
Kontroler lotu
- Nie wszystkie kontrolery lotu są takie same, więc procedura konfiguracji naprawdę zależy od wybranego modelu. Jeśli jeszcze tego nie zrobiłeś, poświęć czas na dokładne zapoznanie się z instrukcją obsługi wybranego kontrolera lotu od początku do końca. Pominięcie najdrobniejszego szczegółu może zadecydować o różnicy między pierwszym udanym lotem a całkowitym odpisem. Dobrze napisana instrukcja obsługi powinna zawierać wszystko, co znajdziesz na tej stronie i nie tylko, dlatego zaleca się korzystanie z tego samouczka jako listy kontrolnej, a nie jako zamiennika / alternatywy dla podstawowych instrukcji dla programistów.
- Większość kontrolerów lotu zapewnia krok po kroku procedurę wyboru ustawień dla konkretnej konfiguracji UAV, w tym pełną kontrolę nad wartościami PID. Wartości dla każdego (P, I i D) można dostosować do konkretnej ramy i stylu latania; od czegoś bardziej stabilnego do wykorzystania platformy w fotografii lotniczej, po coś bardziej zbliżonego do lotów sportowych (wykonywanie salta, wyścigi dronów itp.). Zwykle zaczyna się od domyślnych wartości dla każdego pola, a jeśli nie masz wystarczającego doświadczenia, aby je zmienić, zaleca się pozostawienie wszystkiego tak, jak jest do pierwszego lotu.
- Instrukcja kontrolera lotu powinna również wskazywać, jak ustawić minimalne obroty silnika, czyli prędkość, z jaką obracają się silniki pod obciążeniem. Początkowo można ustawić tę wartość na stosunkowo niskim poziomie – na tyle, by zobaczyć kręcenie się silników, ale nie na tyle, by UAV poruszał się pod wpływem generowanego ciągu. Maksymalny ciąg, jeśli możesz ustawić tę wartość, powinien odpowiadać maksymalnej wartości, jaką może zapewnić drążek przepustnicy twojego osprzętu sterującego.
- Jednym z aspektów, który można omówić w instrukcji obsługi kontrolera lotu bez jakichkolwiek sugestii jest tryb lotu. Wracając do Lekcji 4, „Tryb lotu” określa, które czujniki są używane do stabilizacji drona, a także jego funkcję / przeznaczenie. Najczęstsze czujniki znajdujące się w kontrolerze lotu to żyroskop, akcelerometr, barometr, kompas i prawdopodobnie GPS.
- Jeśli jest to Twój pierwszy dron, zdecydowanie zaleca się, aby mieć najbardziej stabilny tryb lotu dostępny dla kontrolera lotu, który wykorzystuje większość dostępnych czujników do stabilizacji drona. Generalnie dzieje się tak dlatego, że ustawienia regulatora PID mogą być zbyt daleko od twojej ramki/ustawień, dlatego najlepiej wybrać domyślne wartości regulatora PID. Jeśli latałeś wcześniej, tryb ACRO (który używa tylko żyroskopu) może być najlepszy.
- Większość kontrolerów lotu umożliwia również zmianę „trybu lotu” w locie poprzez kanał zapasowy. Na przykład, jeśli twój pilot ma sześć kanałów, możesz rozważyć przypisanie kanału 5 lub 6 (które są często powiązane z przełącznikami), aby móc zmieniać tryb lotu podczas lotu dronem. Przed lotem upewnij się, że wiesz, która pozycja przełącznika odpowiada danemu trybowi lotu.
- Zdecydowanie odradza się korzystanie z GPS hotspot lotu lub jakichkolwiek bardziej wyrafinowanych funkcji/czujników (na przykład ultradźwiękowego czujnika odległości do określania odległości do ziemi), dopóki nie będziesz pewien, że UAV jest dobrze dostrojony. Niektóre podręczniki sugerują używanie tylko trybu ACRO (akrobatycznego), jednak jeśli nie masz dużego doświadczenia w lataniu, latanie w tym trybie nie będzie dla Ciebie fizycznie możliwe, tryb jest najtrudniejszy do kontrolowania, ponieważ stabilizacja jest wykluczona.
Konfiguracja urządzeń sterujących
- Niektóre konsole mają różne tryby działania, np. samolot, helikopter, samochód itp. W 4 (Sekcja: Sterowanie) omówiliśmy cztery główne kanały sterowania: Throttle, Yaw, Pitch i Roll, które zazwyczaj są wartościami kojarzonymi z samolotami lub śmigłowcami. Jeśli instrukcja kontrolera lotu nie określa konkretnego trybu dla nadajnika, zaleca się użycie trybu samolotowego.
- Istnieją dwa rodzaje pilota zdalnego sterowania: Tryb 1 (Tryb 1) i Tryb 2 (Tryb 2). Tryb 2 (najczęściej) z tego typu sterowaniem to Throttle and Yaw powiązany z lewym kanałem / drążkiem / joystickiem, Pitch and Roll z prawym. Możesz również dwukrotnie sprawdzić ich przypisanie, przesuwając drążki bezpośrednio, aby upewnić się, że wartości nie są odwrócone.
- Tryby nadajnika często dodają poziomy „przesunięcia” kanału/sygnału, aby ruch był bardziej odpowiedni dla konkretnego systemu, jednak większość kontrolerów lotu dba o jakiekolwiek przesunięcie i jako takie preferują „surowe” wartości. Jeśli Twój nadajnik nie posiada żadnych trybów, wystarczy sprawdzić, który kanał/drążek/joystick odpowiada za który.
- Nadajnik RC ogólnego przeznaczenia może zapewnić tylko ograniczony zakres sygnałów na każdym kanale, dlatego w tej lekcji radzimy dowiedzieć się, jaki zakres wartości może zapewnić nadajnik RC i czy minimalna i można regulować wartości maksymalne (lub jako wartości lub jako procent zakresu domyślnego). Na przykład kontrolery lotu oparte na MultiWii wymagają nadajników, które mogą zapewnić pełny zakres impulsów od 500ms do 2500ms, podczas gdy domyślne ustawienie może wynosić tylko 1000ms do 2000ms, ponieważ jest to powszechna konfiguracja dla samolotów R/C. Przeczytaj instrukcję obsługi nadajnika, aby dowiedzieć się, jak ustawić punkty końcowe/zakres sygnału (jeśli dotyczy).
- Jeśli twój kontroler ma wyświetlacz LCD, często możesz to zrobić za pomocą interfejsu w „Ustawieniach”.
- „Test urządzeń sterujących przy max. Odległość ”najłatwiej jest wdrożyć z pomocą znajomego / pomocnika lub podłączyć brzęczyk lub inną wizualną / dźwiękową informację zwrotną do drona RC. Niektóre modele z wyższej półki mają funkcję testu zasięgu. Celem testu jest sprawdzenie, jak daleko pokonuje sygnał, zanim odbiornik nie będzie mógł go odebrać. Zaleca się stosowanie testu zasięgu dopiero po tzw. Procedura testu zasięgu:
- Włącz urządzenie sterujące, a następnie dron.
- Cofnij się o 15 metrów i włącz przełącznik związany z brzęczykiem; Musisz go usłyszeć.
- Jeśli nie masz brzęczyka, włącz samolot i upewnij się, że silniki pracują.
- Wycisz brzęczyk / uzbrajanie drona
- Powtarzaj te kroki dalej i dalej (linia wzroku), aż dron zareaguje na twoje wejście.
- To będzie absolutna maksymalna odległość, na jaką możesz przelecieć swoim dronem.
- Możesz pomyśleć, że nie planujesz latać tak daleko, ale pamiętaj, że dron porusza się w trzech osiach i coś może pójść nie tak.
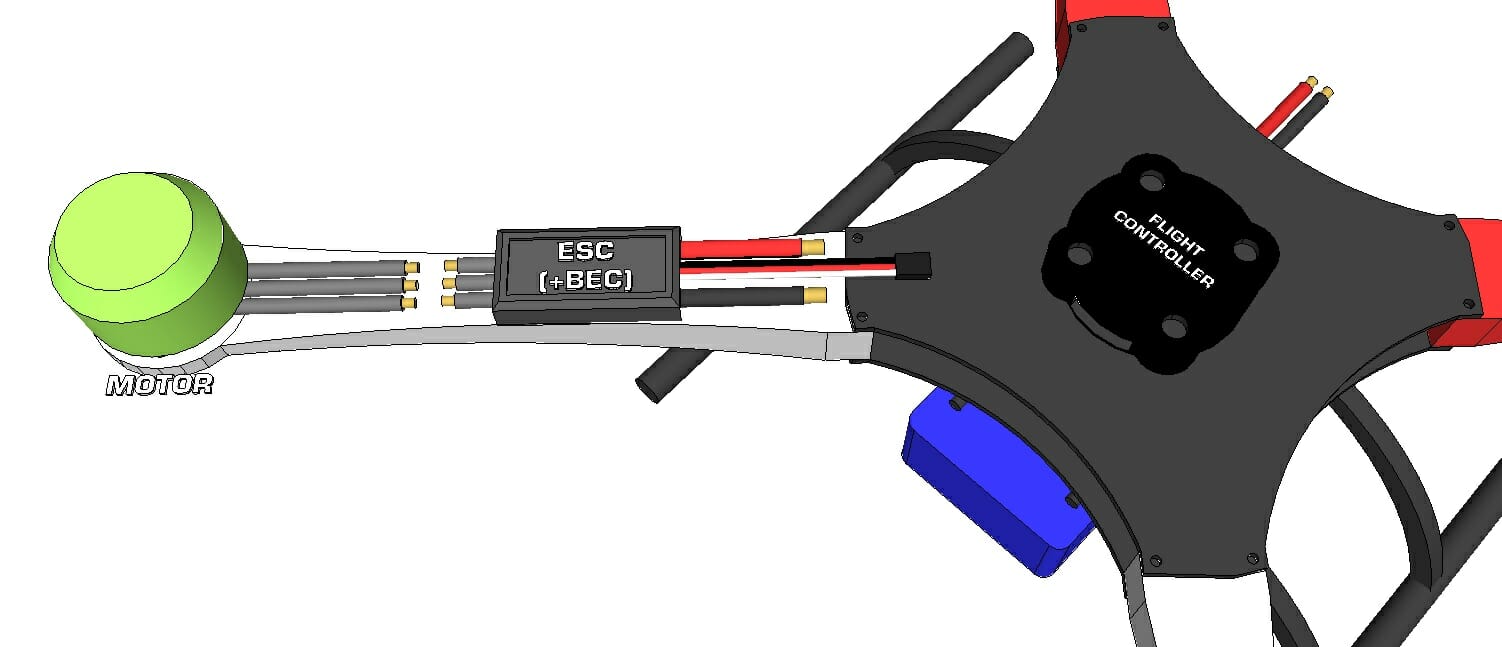
Kalibracja ESC
ESC będzie działać po wyjęciu z pudełka, ale sygnały (PWM/PWM) związane z minimalną i maksymalną przepustnicą mogą nie pasować do tego co zapewnia Twój nadajnik. Dlatego musisz „wytrenować” każdy ESC z wymaganymi wartościami. Upewnij się, że śmigła nie są zamontowane na silnikach. Zapoznaj się z instrukcją obsługi kontrolera lotu. Po przeprogramowaniu ESC zachowuje swoją aktualną konfigurację, nawet gdy nie jest zasilany. Dlatego każdy ESC jest programowany tylko raz, podczas wstępnego testu/konfiguracji.
Zazwyczaj w instrukcji kontrolera lotu znajduje się sekcja, która wyjaśnia, jak kalibrować ESC i wyjaśnia, jak to zrobić. Jeśli nie, możesz wypróbować jedną z metod sugerowanych poniżej. Po raz kolejny, jeśli twoje śmigła nie zostały jeszcze usunięte, czas to zrobić.
Nadajnik
- Podłącz jeden ESC do styku „Throttle” w odbiorniku. Jeśli Twój ESC nie ma podłączonego BEC, możesz podłączyć jeden ESC z obsługą BEC do innego styku odbiornika (takiego jak wejście akumulatora), aby po prostu zasilić odbiornik.
- Podłączyć ESC do odpowiedniego silnika (jeśli nie jest jeszcze podłączony).
- Ustaw drążek/joystick powiązany z „Throttle” na maksimum (zwykle lewy drążek/joystick i maksymalnie do przodu/do góry), a następnie włącz nadajnik.
- Podłącz akumulator LiPo do tablicy rozdzielczej lub bezpośrednio do tego ESC (jeśli złącza są kompatybilne).
- Silnik powinien wydać trzy sygnały dźwiękowe (11,1V LiPo), po których nastąpi krótka przerwa, a następnie dwa krótkie dźwięki (co jest maksymalnym dźwiękiem).
- Natychmiast po krótkich sygnałach dźwiękowych przesuń drążek Throttle/joystick do najniższej pozycji (czyli minimalnego sygnału dźwiękowego).
- Silnik powinien wydać trzykrotny sygnał dźwiękowy (11,1V LiPo), a następnie długi dźwięk.
- Zakres przepustnicy dla tego ESC jest teraz ustawiony, przejdź do następnego, aż wszystkie ESC zostaną skalibrowane.
Inne metody
Postępuj zgodnie z instrukcjami zawartymi w instrukcji obsługi produktu, aby dopasować minimalny/maksymalny zakres wejściowy ESC do tego, co otrzyma z nadajnika.
- USB: Niektóre modele ESC można programować przez USB, niezależnie lub za pomocą adaptera.
- Płytka Programująca: Zewnętrzna Płytka Programująca ESC, może być używana z prawie każdym ESC i jest samodzielnym urządzeniem.
- Mikrokontroler: Ta metoda nie jest powszechnie stosowana, ale z pewnością możliwe jest przeprogramowanie ESC za pomocą mikrokontrolera, jeśli masz poprawny kod i potrafisz się prawidłowo podłączyć.
- Kontroler lotu: Niektóre kontrolery lotu umożliwiają kalibrację lub programowanie ESC poprzez ich interfejs programowania. Przeczytaj instrukcje kontrolera lotu, aby sprawdzić, czy jest to możliwe.
Silnik i wirnik główny (śmigło). Kierunek.
Jesteś teraz gotowy do zainstalowania śmigieł. Wróćmy do 3 lekcji, w której omawiamy kierunek wirnika głównego tak, aby wytwarzał ciąg. Wszystkie śmigła mają górną i dolną część oraz kierunek obrotów CW (zgodnie z ruchem wskazówek zegara) i CCW (przeciwnie do ruchu wskazówek zegara). Zazwyczaj na górze podpórki znajduje się tekst wskazujący jej wysokość i średnicę. Gdy śmigło jest zamontowane na wale silnika, ta góra jest skierowana w niebo, niezależnie od tego, czy silnik jest zamontowany na górze belki drona, czy na dole drona.

Lista kontrolna pilota przed lotem
Chociaż dron nie jest tak skomplikowany ani niebezpieczny jak prawdziwy samolot komercyjny, ty - jako pilot i musi mieć listę kontrolną przed lotem, aby upewnić się, że nadchodzący lot nie będzie zagrażał ludziom ani mienia. Poniższa lista zawiera tylko niezbędne elementy i musi być wykonana przed każdym lotem (nie tylko przed pierwszym).
- Upewnij się, że masz dostępne pomoce wizualne, aby stwierdzić, która strona drona jest z przodu. Dodaj co najmniej kolorową taśmę do dwóch przednich belek.
- Upewnij się, że akumulator urządzenia sterującego jest naładowany.
- Lekko potrząśnij BSP - nic nie powinno się poluzować, grzechotać ani spaść na ziemię. Nigdy nie dowiesz się, co mogło zostać przemieszczone lub uszkodzone w wyniku twardego lądowania podczas poprzedniego lotu.
- Upewnij się, że śmigła są nadal dobrze zamocowane.
- Najpierw włącz urządzenia sterujące, a następnie zasil drona (trzymaj ręce z dala od wirników).
- Upewnij się, że możesz niezawodnie uzbroić i uzbroić silniki (powinny obracać się na niskich obrotach, gdy „Uzbrojenie” i przestać się obracać, gdy „Rozbrojenie”)
- Upewnij się, że skalibrowałeś lub czujniki są dobre skalibrowany (trzeba to robić regularnie)
- Sprawdź zasięg nadajnika.
- Upewnij się, że obszar lotu jest całkowicie czysty i jeśli ktoś się w nim znajduje, daj mu znać, zwłaszcza ciekawskie dzieci; że lecisz UAV i że nie powinieneś zbliżać się, dopóki dron nie wyląduje z całkowicie zatrzymanymi silnikami.

Testowanie
Dopóki nie zdobędziesz wystarczającej pewności co do swoich umiejętności pilota i projektanta dronów, następująca procedura jest sugerowane wszystkim bezzałogowe statki powietrzne przed pierwszym lotem.
- Włącz silniki i upewnij się, że obracają się we właściwych kierunkach, jak opisano w instrukcji kontrolera lotu.
- Podnieś drążek przepustnicy/joystick bardzo powoli i upewnij się, że śmigła popychają powietrze w dół w kierunku ziemi. Korzystanie z bibuły to bezpieczna opcja do oględzin.
- Przesuń drążek Pitch/joystick bardzo ostrożnie do przodu/do tyłu, aby upewnić się, że dron prawidłowo przechyla się do przodu/do tyłu.
- Bardzo ostrożnie przesuń drążek/joystick na każdą stronę, aby upewnić się, że dron reaguje prawidłowo.
Jeśli dron nie zachowuje się prawidłowo, istnieje wiele możliwych przyczyn, wśród których najczęstsze to:
- Jeden lub więcej silników obraca się w niewłaściwym kierunku.
- Kontroler lotu nie został prawidłowo zainstalowany i to, co uważa za „do przodu”, różni się od fizycznego UAV.
- Jeden lub więcej styków między odbiornikiem a kontrolerem lotu nie jest podłączonych prawidłowo lub nawet w niewłaściwym miejscu.
- Być może wszystko jest ustawione poprawnie, po prostu zbyt szybko lub zbyt gwałtownie, aby reagować na dane wejściowe użytkownika.
Plan awaryjny
dopiero zaczynam pracę w terenie i/lub z nowym dronem. Poniższa lista ma na celu dać ci rzeczy do przemyślenia i kilka pomysłów na to, jak i dlaczego odpowiadać początkującym pilotom. Decyzja podejmowana jest indywidualnie, aw niektórych sytuacjach może być sprzeczna z propozycją. Więc poznaj siebie, poznaj swoje otoczenie i bądź ostrożny! W prawie wszystkich przypadkach lepiej będzie zgubić drona, niż ryzykować kolizję z ludźmi lub mieniem.
Dron jest bardzo daleko i nie wiesz, w którym kierunku jest.
- Zmniejsz przepustnicę i obserwuj czy dron reaguje (sprawdza czy jest połączenie).
- Jeśli dron zareaguje na gaz, spróbuj wylądować właśnie tam (jeśli możesz).
- Jeśli ta lokalizacja nie nadaje się do lądowania, staraj się ostrożnie skierować drona do przodu (nic drastycznego), a jeśli dron zareaguje polegając na twojej pozycji, poruszanie się w lewo lub w prawo na niebie pozwoli ci określić jego orientacja. Jeśli wydaje się, że nie porusza się w lewo lub w prawo, może zbliżać się do ciebie lub oddalać się od ciebie, więc cofnij to, co właśnie zrobiłeś i spróbuj szorować w lewo.
Dron nagle gwałtownie zbacza z kursu (z powodu lub bez powodu).
- Jeśli nie jesteś biegły w pilotowaniu (aby spróbować go przywrócić), zrzuć całkowicie gaz i pozwól mu opaść: w tym przypadku kontemplacja radykalnego działania może doprowadzić do tego, że stracisz wzrok drona lub, co gorsza, dron zacznie się wspinać i spadać z większej odległości.
Dron porusza się szybko w kierunku ludzi.
- Gaz do maksimum, aby nabrać wysokości i przelecieć nad nimi; Twój dron prawdopodobnie nadal będzie znajdował się w prawidłowej ogólnej orientacji, więc lepiej zgubić drona niż wlecieć w ludzi.
- Po osiągnięciu optymalnej wysokości spróbuj odzyskać kontrolę, a następnie ustaw go tak, aby znajdował się nad czystym obszarem lądowania.
Dron porusza się szybko w twoim kierunku.
- Gaz do zera; niech wbije się w ziemię, niż wleci w twoją głowę.
Dron nie reaguje na sygnały wejściowe z urządzeń sterujących.
- W takim przypadku nic nie możesz zrobić. Jeśli dron nadal jest w powietrzu, baterie w pilocie mogą się wyczerpać.
Dron traci śmigło.
- Utrata śmigła wpływa zarówno na ciąg jak i odchylenie; spróbuj najpierw wyprostować yaw (najpewniej trzeba trzymać drążek/joystick podłączony do yaw w skrajnym położeniu), a potem jednocześnie ostrożnie przesunąć drążek gazu/throttle w górę, aby zapobiec kolizji, a następnie w dół.
Pierwszy lot
Niezależnie od Twoich wcześniejszych doświadczeń z lataniem, Twój pierwszy lot, zwłaszcza z niestandardowym wielosilnikowym UAV, powinien być jak najbardziej dyskretny. Celem pierwszego lotu jest upewnienie się, że wszystko jest poprawnie skonfigurowane; a także identyfikowanie wszelkich poważnych problemów.
- Lokalizacja: teren otwarty, z dala od budynków, ludzi i mienia. Na przykład: idealne byłoby puste boisko do piłki nożnej, boisko do baseballu i tak dalej. W ogóle nie powinno być wiatru.
- Przejrzyj listę kontrolną pilota przed lotem.
- Stań około 2 metry od drona z przodem drona odwróconym od ciebie.
- Uzbroić silniki.
- Delikatnie przesuń drążek gazu / joystick w górę. Dotrzyj do punktu, w którym dron jest gotowy do startu. Mogą wystąpić pewne efekty naziemne, które powodują lekkie odbicie drona, ale nie martw się.
- Dodaj przepustnicę, aby oderwać drona od ziemi i przyzwyczaić się do sterowania - staraj się trzymać go w określonym promieniu i zobacz, jak reaguje na ruchy drążka/dżojstika.
- Wykonuj małe, stopniowe i płynne ruchy — nic zbyt nagłego. Opuść drążek gazu, aby zapobiec wypadkowi.
- Jeśli twój dron nie zachowuje się zgodnie z oczekiwaniami (na przykład przesuwanie osi „Pitch” prowadzi do jego nachylenia, a także przechylanie się w lewo lub w prawo), coś jest nie tak i będziesz musiał dowiedzieć się przyczyny zidentyfikowanych problemów...
- Jeśli dron zachowuje się zgodnie z oczekiwaniami, Twoim zadaniem jest stabilne utrzymanie pozycji na wysokości 1,2-2 metrów nad ziemią. Nie wściekaj się tak szybko.


.Loty dodatkowe
Skoro już wypracowałeś usterki i lataj wygodnie w kontrolowanym środowisku, możesz przystąpić do drugiego lotu.
- Ponieważ dron nie jest jeszcze w pełni przetestowany, sugerujemy przejście pełnej procedury przed lotem dla pierwszego lotu, co nie powinno zająć dużo czasu.
- Używając płynnych ruchów, przyzwyczaj się do tego, jak dron reaguje na ruchy twojego kija/kija, trzymając go w bezpiecznej odległości.
- Przystosowanie do pilotażu drona powinno odbywać się bez pomocy FPV i różnych czujników.







