İçindekiler
- DIY drone: Ders 1. Terminoloji.
- Kendi ellerinizle drone: Ders 2. Çerçeveler.
- Kendin yap drone: Ders 3. Santral.
- Kendin yap drone: Ders 4. Uçuş kontrolörü.
- Kendin yap drone: Ders 5. Montaj.
- Kendin yap drone: Ders 6. Performans kontrolü.
- DIY Drone: Ders 7. FPV ve Mesafe.
- Kendi ellerinizle drone: Ders 8. Uçaklar.
Giriş
Ders 5'te dronun (pervane takmadan) montajını bitirmeniz gerekiyordu. Acele etmeyin, küçük hatalar bile bir çökmeye neden olabilir. İlk uçuşunuzdan önce atmanız gereken birkaç adım var, bu yüzden sabırlı olun ve aşağıdaki yönergeleri izleyin. Bir önceki derste olduğu gibi, İHA ile (şu anda en yaygın kullanılan kontrol yöntemi olarak) etkileşim kurmak için radyo kontrol ekipmanı kullandığınızı varsaymaya devam edeceğiz.
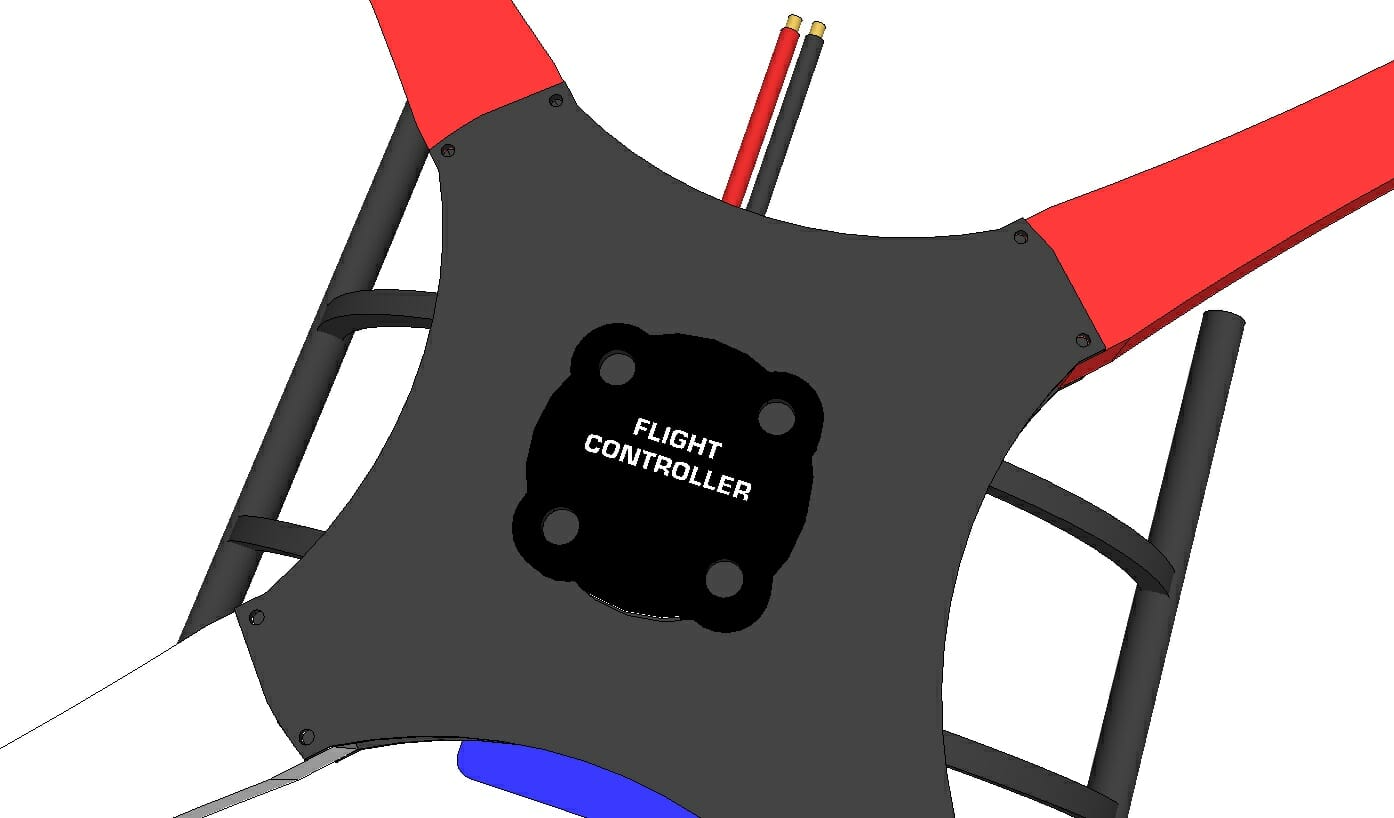
Uçuş Kontrolörü
- Tüm uçuş kontrolörleri aynı değildir, bu nedenle kurulum prosedürü gerçekten seçtiğiniz modele bağlıdır. Henüz yapmadıysanız, seçilen uçuş kontrolörünün kullanım kılavuzunu baştan sona tamamen okumak için zaman ayırın. En küçük ayrıntıyı atlamak, ilk başarılı uçuş ile tam bir iptal arasındaki farkı yaratabilir. İyi yazılmış bir kullanım kılavuzu, bu sayfada bulduğunuz her şeyi ve daha fazlasını içermelidir, bu nedenle bu öğreticiyi temel geliştirici talimatlarının yerine / alternatifi olarak değil, bir kontrol listesi olarak kullanmanız önerilir.
- Çoğu uçuş kontrolörü, PID değerleri üzerinde tam kontrol dahil olmak üzere belirli bir UAV konfigürasyonu için ayarların seçilmesi için adım adım bir prosedür sağlar. Her birinin (P, I ve D) değerleri, özel çerçeveniz ve uçuş tarzınız için ayarlanabilir; platformu hava fotoğrafçılığında kullanmak için daha kararlı bir şeyden, spor uçuşlarına daha benzer bir şeye (takla yapma, drone yarışı, vb.). Genellikle her alan için varsayılan değerlerle başlar ve bunları değiştirmek için yeterli tecrübeniz yoksa ilk uçuşa kadar olduğu gibi bırakmanız önerilir.
- Uçuş kontrolörü kılavuzu ayrıca, güç ünitesinin minimum RPM'sinin nasıl ayarlanacağını, yani motorların yüklendiğinde dönüş hızının nasıl ayarlanacağını belirtmelidir. Başlangıçta, bu değeri nispeten düşük olarak ayarlayabilirsiniz - sadece motorların döndüğünü görmeye yetecek kadar, ancak UAV'lerin ürettikleri itme kuvveti tarafından hareket ettirileceği kadar değil. Bu değeri ayarlayabiliyorsanız maksimum itme, kontrol tertibatınızın gaz kelebeği çubuğunun sağlayabileceği maksimum değere karşılık gelmelidir.
- Uçuş kontrolörünün kullanım kılavuzunda herhangi bir öneride bulunmadan tartışılabilecek bir husus uçuş modudur. Ders 4'e dönersek, “Uçuş Modu”, drone'u stabilize etmek için hangi sensörlerin kullanıldığını ve ayrıca işlevini / amacını belirler. Bir uçuş kontrol cihazında bulunan en yaygın sensörler jiroskop, ivmeölçer, barometre, pusula ve muhtemelen GPS'dir.
- Bu ilk dronunuzsa, dronu dengelemek için mevcut en fazla sensörü kullanan uçuş kontrol cihazınız için mevcut en kararlı uçuş moduna sahip olmanız şiddetle tavsiye edilir. Genel olarak bunun nedeni, PID denetleyici ayarlarının çerçevenizden/ayarlarınızdan çok uzak olabilmesidir, bu nedenle varsayılan PID denetleyici değerlerini seçmek en iyisidir. Daha önce uçtuysanız, ACRO modu (yalnızca jiroskopu kullanan) en iyisi olabilir.
- Çoğu uçuş kontrol cihazı, uçuş sırasında bir yedek kanal aracılığıyla “uçuş modunu” değiştirmenize de izin verir. Örneğin, uzaktan kumandanızda altı kanal varsa, drone ile uçarken uçuş modunu değiştirebilmeniz için kanal 5 veya 6'yı (genellikle anahtarlarla ilişkilendirilir) atamayı düşünebilirsiniz. Uçmadan önce, hangi şalter konumunun hangi uçuş moduna karşılık geldiğini bildiğinizden emin olun.
- İHA'nın iyi ayarlandığından emin olana kadar GPS etkin nokta uçuşunu veya daha karmaşık işlevleri / sensörleri (örneğin, yere olan mesafeyi belirlemek için bir ultrasonik mesafe sensörü) kullanmak kesinlikle önerilmez. Bazı kılavuzlar yalnızca ACRO (akrobatik) modunu kullanmanızı önerir, ancak önemli bir uçuş deneyiminiz yoksa, bu modda uçmak sizin için fiziksel olarak mümkün olmayacaktır, mod, stabilizasyon hariç tutulduğundan kontrol edilmesi en zor olanıdır.
Kontrol ekipmanı konfigürasyonu
- Bazı konsolların Uçak, Helikopter, Araba vb. gibi farklı çalışma modları vardır. 4 (Bölüm: Kontrol)'de, genellikle uçak veya helikopterlerle ilişkili değerler olan Gaz Kelebeği, Yaw, Pitch ve Roll olmak üzere dört ana kontrol kanalını ele aldık. Uçuş kontrolörü kılavuzu, verici için belirli bir mod belirtmiyorsa, Uçak modunun kullanılması önerilir.
- İki tür uzaktan kumanda vardır: Mod 1 (Mod 1) ve Mod 2 (Mod 2). Bu tür kontrolde Mod 2 (en yaygın), sol kanal / çubuk / joystick ile ilişkili Gaz ve Sapma, sağ ile Pitch ve Roll'dur. Ayrıca değerlerin ters çevrilmediğinden emin olmak için çubukları doğrudan hareket ettirerek atamalarını iki kez kontrol edebilirsiniz.
- Verici modları, hareketi belirli bir sistem için daha uygun hale getirmek için genellikle kanal / sinyal “ofset” seviyeleri ekler, ancak çoğu uçuş kontrolörü herhangi bir ofseti önemser ve bu nedenle "ham" değerleri tercih edin. Vericinizin herhangi bir modu yoksa, hangi kanaldan / çubuktan / joystick'in hangisinden sorumlu olduğunu kontrol edin.
- Genel amaçlı bir RC vericisi, her kanalda yalnızca sınırlı bir sinyal aralığı sağlayabilir ve bu nedenle bu derste, bir RC vericisinin hangi değer aralığını sağlayabildiğini ve minimum ve maksimum değerler ayarlanabilir (veya değerler olarak veya varsayılan aralığın yüzdesi olarak). Örneğin, MultiWii tabanlı uçuş kontrolörleri, 500ms'den 2500ms'ye kadar tam bir darbe aralığı sağlayabilen vericiler gerektirirken, varsayılan ayar yalnızca 1000ms ila 2000ms olabilir, çünkü bu R/C uçakları için ortak bir yapılandırmadır. Sinyal uç noktalarının / aralığının (varsa) nasıl ayarlanacağını öğrenmek için verici kılavuzunuzu okuyun.
- Kontrol cihazınız bir LCD ekrana sahipse, bunu genellikle “Ayarlar” altındaki arayüzden yapabilirsiniz.
- “Maks. Mesafe ”, bir arkadaşın / yardımcının yardımıyla uygulamak veya RC drone'a bir zil veya başka bir görsel / sesli geri bildirim bağlamak en kolay yoldur. Bazı üst düzey modellerde menzil testi işlevi vardır. Testin amacı, alıcının artık onu alamamasından önce sinyalin ne kadar uzağa gittiğini görmektir. Menzil testinin yalnızca "Dövüş uçuşu" olarak adlandırılandan sonra kullanılması önerilir (Dövüş uçuşu - drone, pilot drone'nun görüş alanı içinde kısa bir mesafede performans açısından test edilir). Menzil Test Prosedürü:
- Kontrol ekipmanını, ardından hava aracını açın.
- 15 metre geri çekilin ve sesli uyarı ile ilişkili anahtarı etkinleştirin; Onu duymalısın.
- Buzzer'ınız yoksa, uçağı açın ve motorların çalıştığından emin olun.
- Zil sesini susturun / drone'u yeniden etkinleştirin
- Drone girişinize yanıt verene kadar bu adımları daha fazla (görüş hattı) tekrarlayın.
- Bu, dronunuzu uçurabileceğiniz mutlak maksimum mesafe olacaktır.
- O kadar uzağa uçmayı planlamadığınızı düşünebilirsiniz, ancak drone'nun üç eksende hareket ettiğini ve bir şeylerin ters gidebileceğini unutmayın.
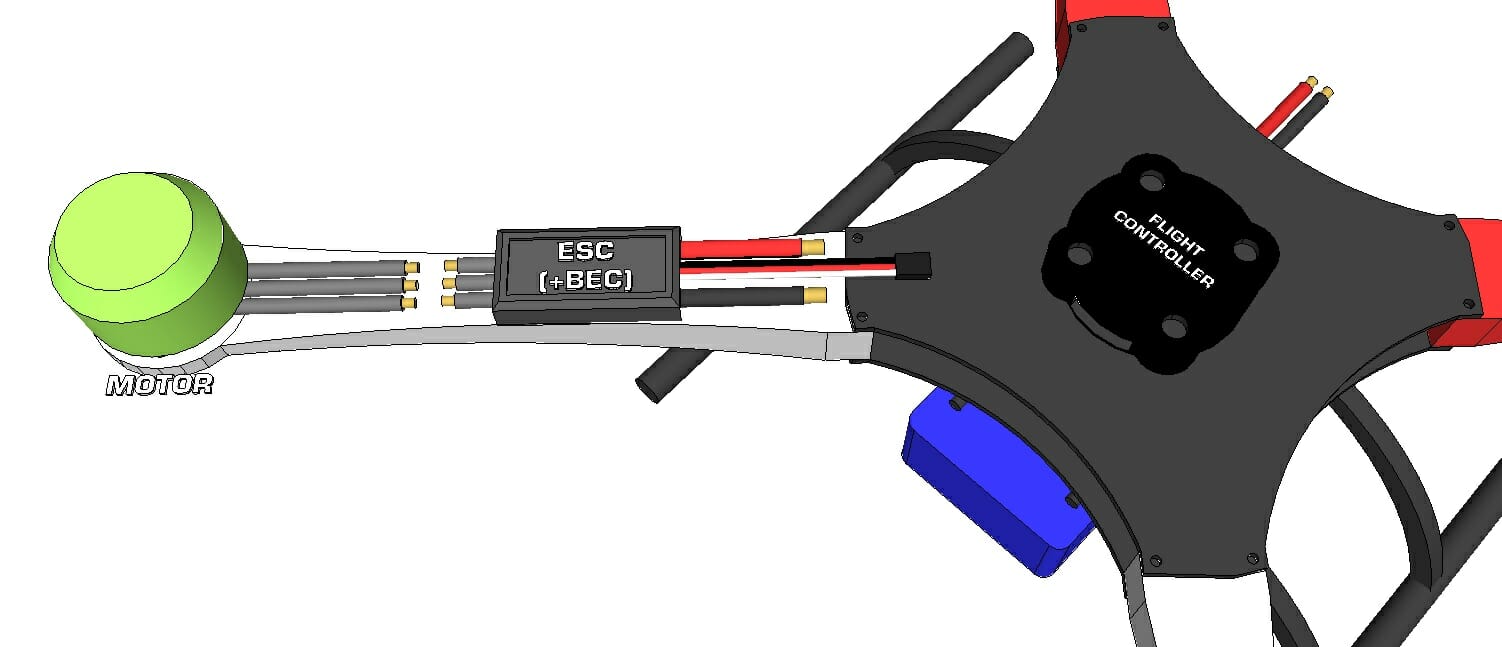
ESC Kalibrasyonu
ESC kutunun dışında çalışacak, ancak minimum ve maksimum gaz kelebeği ile ilişkili sinyaller (PWM / PWM) sağlananla eşleşmeyebilir. vericiniz. Bu nedenle, her bir ESC'yi gerekli değerlerle "eğitmeniz" gerekir. Pervanelerin motorlara monte edilmediğinden emin olun. Uçuş kontrol cihazınızın kullanım kılavuzuna bakın. Yeniden programlamadan sonra, ESC, güç verilmediğinde bile mevcut konfigürasyonunu korur. Bu nedenle, her ESC, ilk test / kurulum sırasında yalnızca bir kez programlanır.
Genellikle uçuş kontrolörü kılavuzunda ESC'nin nasıl kalibre edileceğini ve nasıl yapılacağını açıklayan bir bölüm vardır. Değilse, aşağıda önerilen yöntemlerden birini deneyebilirsiniz. Bir kez daha, pervanelerinizi henüz çıkarmadıysanız, bunu yapmanın zamanı geldi.
Verici
- Alıcınızdaki “Gaz” pimine bir ESC bağlayın. ESC'nize bağlı bir BEC yoksa, yalnızca alıcıya güç sağlamak için BEC etkin bir ESC'yi alıcıdaki başka bir pime (pil girişi gibi) bağlayabilirsiniz.
- ESC'yi uygun motora bağlayın (zaten bağlı değilse).
- "Gaz" ile ilişkili çubuğu / joystick'i maksimuma ayarlayın (genellikle sol çubuk / joystick ve tam ileri / yukarı), ardından vericiyi açın.
- LiPo pili güç dağıtım panosuna veya doğrudan bu ESC'ye bağlayın (konektörler uyumluysa).
- Motor üç kez bip (11.1V LiPo) ve ardından kısa bir duraklama ve ardından iki kısa bip (maksimum bip sesidir) gelmelidir.
- Kısa bip seslerinden hemen sonra Gaz kolunu / joystick'i en düşük konuma getirin (minimum bip sesidir).
- Motor üç kez bip (11.1V LiPo) ve ardından uzun bir bip sesi vermelidir.
- Bu ESC için gaz kelebeği aralığı şimdi ayarlanmıştır, tüm ESC'ler kalibre edilene kadar bir sonrakine geçin.
Diğer yöntemler
ESC giriş sinyalinin minimum / maksimum aralığını vericiden alacağı sinyalle eşleştirmek için ürün kullanım kılavuzundaki talimatları izleyin.
- USB: Bazı ESC modelleri, bağımsız olarak veya bir adaptörle USB üzerinden programlanabilir.
- Programlama Kartı: Harici ESC Programlama Kartı, hemen hemen her ESC ile kullanılabilir ve bağımsız bir cihazdır.
- Mikrodenetleyici: Bu yöntem yaygın olarak kullanılmamaktadır, ancak doğru koda sahipseniz ve doğru bağlanabiliyorsanız ESC'yi bir mikro denetleyici ile yeniden programlamak kesinlikle mümkündür.
- Uçuş Kontrolörü: Bazı uçuş kontrolörleri, programlama arayüzleri aracılığıyla ESC'leri kalibre etmenize veya programlamanıza izin verir. Bunun mümkün olup olmadığını görmek için uçuş kontrol cihazınızın talimatlarını okuyun.
Motor ve ana rotor (pervane). Yön.
Artık pervaneleri takmaya hazırsınız. İtki oluşturmak için ana rotorun yönünü tartışan 3. derse geri dönelim. Tüm pervanelerin bir üst ve alt ve bir CW (saat yönünde) ve CCW (saat yönünün tersine) dönüş yönü vardır. Genellikle bir pervanenin tepesinde, yüksekliğini ve çapını gösteren bir metin bulunur. Pervane motor miline monte edildiğinde, bu üst kısım, motorun drone kirişinin üstüne veya drone'nun altına monte edilmiş olmasına bakılmaksızın gökyüzüne doğru işaret eder.

Pilot Ön Kontrol Kontrol Listesi
Drone gerçek bir ticari uçak kadar karmaşık veya tehlikeli olmasa da, siz - bir pilot olarak ve yaklaşan uçuşun insanları veya mülkü tehlikeye atmayacağından emin olmak için bir uçuş öncesi kontrol listesine sahip olmalıdır. Aşağıdaki liste yalnızca temelleri kapsar ve her uçuştan önce gerçekleştirilmelidir (yalnızca ilkinden önce değil).
- Drone'nuzun hangi tarafının önde olduğunu anlamak için görsel yardımcılardan herhangi birine sahip olduğunuzdan emin olun. En azından iki ön kirişe renkli bant ekleyin.
- Kontrol ekipmanı pilinin şarjlı olduğundan emin olun.
- UAV'yi hafifçe sallayın - hiçbir şey gevşememeli, sallanmamalı veya yere düşmemelidir. Önceki bir uçuşta sert iniş sonucunda neyin yerinden çıktığını veya kırıldığını asla bilemezsiniz.
- Pervanelerin hala güvenli bir şekilde takılı olduğundan emin olun.
- Önce kontrol ekipmanını açın, ardından drone'a güç verin (ellerinizi rotorlardan uzak tutun).
- Motorları güvenilir bir şekilde devreye aldığınızdan ve yeniden devreye aldığınızdan emin olun ("Aç" olduğunda düşük RPM'de dönmeli ve "Devre Dışı Bırakma" olduğunda dönmeyi bırakmalıdır)
- Kalibre ettiğinizden veya sensörlerin iyi olduğundan emin olun kalibre edilmiş (bunu düzenli olarak yapmalısınız)
- Vericinin menzilini kontrol edin.
- Uçuş alanının tamamen boş olduğundan emin olun ve içinde biri varsa, özellikle meraklı çocukları bilgilendirin; İHA'yı uçurduğunuzu ve dron motorları tamamen durmuş halde inene kadar yaklaşmamanız gerektiğini söyledi.

Test
Pilot ve drone tasarımcısı olarak yeteneklerinize yeterince güveninceye kadar, aşağıdaki prosedür ilk uçuşlarından önce herkese insansız hava araçları için önerilir.
- Motorları çalıştırın ve uçuş kontrolörü kılavuzunda açıklandığı gibi doğru yönlerde döndüklerinden emin olun.
- Gaz kolunu / joystick'i çok yavaş kaldırın ve pervanelerin havayı yere doğru ittiğinden emin olun. Kağıt mendil kullanmak, görsel inceleme için güvenli bir seçenektir.
- Drone'nun ileri / geri doğru eğildiğinden emin olmak için Pitch stick / joystick'i çok dikkatli bir şekilde ileri / geri hareket ettirin.
- Drone'nun doğru tepki verdiğinden emin olmak için Roll stick / joystick'i her iki tarafa çok dikkatli bir şekilde hareket ettirin.
Drone düzgün çalışmıyorsa, birçok olası neden vardır ve bunların en yaygın olanları şunlardır:
- Bir veya daha fazla motor yanlış yönde dönüyor.
- Uçuş kontrolörü doğru şekilde kurulmamış ve "ileri" olarak değerlendirdiği şey, fiziksel İHA'nızdan farklı.
- Alıcı ile uçuş kontrolörü arasındaki bir veya daha fazla kontak doğru bağlanmamış veya hatta yanlış yerde.
- Belki de her şey doğru ayarlanmış, sadece çok hızlı veya kullanıcı girdisine yanıt veremeyecek kadar ani.
Acil Durum Planı
sahada ve/veya yeni bir drone ile çalışmaya yeni başlıyor. Aşağıdaki liste size düşünmeniz gereken şeyler ve hevesli pilotlara nasıl ve neden yanıt verebileceğiniz konusunda bazı fikirler vermeyi amaçlamaktadır. Karar, duruma göre verilir ve bazı durumlarda burada önerilenlerle çelişebilir. O halde kendinizi tanıyın, çevrenizi tanıyın ve dikkatli olun! Neredeyse tüm durumlarda, insanlarla veya mülklerle çarpışma riskinden ziyade drone'u kaybetmek daha iyi olacaktır.
Drone çok uzakta ve hangi yönde olduğunu bilmiyorsunuz.
- Gazı azaltın ve drone'nun yanıt verip vermediğini gözlemleyin (bağlantı olup olmadığını kontrol eder).
- Drone gaza tepki veriyorsa, tam oraya inmeyi deneyin (mümkünse).
- Bu konum iniş için uygun değilse, drone'yu dikkatlice ileriye doğru yönlendirmeye çalışın (sert bir şey değil) ve drone konumunuza bağlı olarak tepki veriyorsa, gökyüzünde sola veya sağa hareket etmek belirlemenizi sağlayacaktır. onun yönelimi. Sola veya sağa hareket etmiyor gibi görünüyorsa, size doğru veya sizden uzaklaşıyor olabilir, bu yüzden az önce yaptığınızı geri alın ve sola doğru ovalamayı deneyin.
Drone aniden rotasından keskin bir şekilde sapıyor (sebepli veya sebepsiz).
- Pilotaj konusunda uzman değilseniz (onu eski haline getirmeye çalışmak için), gazı tamamen bırakın ve bırakın: bu durumda, radikal eylemi düşünmek, görüşünüzü kaybetmenize neden olabilir. dronun veya daha da kötüsü, dron daha uzak bir mesafeden düşmek için tırmanmaya başlayacaktır.
Drone hızla insanlara doğru ilerliyor.
- İrtifa kazanmak ve üzerlerinden uçmak için maksimuma gaz verin; dronunuz muhtemelen hala doğru genel yönelimde olacaktır, bu nedenle dronu kaybetmek insanlara uçmaktan daha iyidir.
- Optimum irtifaya ulaştıktan sonra kontrolü yeniden kazanmaya çalışın, ardından açık iniş alanının üzerinde olacak şekilde konumlandırın.
Drone hızla size doğru hareket ediyor.
- Gaz sıfıra; kafanıza uçmak yerine yere çarpmasına izin verin.
Drone, kontrol ekipmanından gelen girdilere yanıt vermiyor.
- Bu durumda yapabileceğiniz bir şey yok. Drone'nuz hala havadaysa, uzaktan kumanda pilleriniz bitmiş olabilir.
Drone, pervaneyi kaybediyor.
- Pervane kaybı, hem itmeyi hem de yalpalamayı etkiler; önce yalpalamayı düzeltmeye çalışın (muhtemelen yalpaya bağlı çubuğu / joystick'i aşırı konumda tutmanız gerekir) ve ardından aynı zamanda bir çarpışmayı önlemek için gaz kelebeğini / gaz kelebeğini dikkatli bir şekilde yukarı, ardından gaz kelebeğini aşağı doğru hareket ettirin.
İlk uçuş
Önceki uçuş deneyiminiz ne olursa olsun, özellikle özel çok motorlu bir İHA ile ilk uçuşunuz mümkün olduğunca gizli olmalıdır. İlk uçuşun amacı, her şeyin doğru şekilde kurulduğundan emin olmaktır; herhangi bir ciddi sorunu tanımlamanın yanı sıra.
- Yer: açık alan, binalardan, insanlardan ve mülkten uzakta. Örneğin: boş bir futbol sahası, beyzbol sahası vb. ideal olacaktır. Hiç rüzgar olmamalı.
- Pilotun uçuş öncesi kontrol listesini gözden geçirin.
- Drone'nun ön tarafı sizden uzağa bakacak şekilde drone'dan yaklaşık 2 metre uzakta durun.
- Motorları devreye alın.
- Gaz kolunu / joystick'i yavaşça yukarı hareket ettirin. Uçağın kalkışa hazır olduğu noktaya ulaşın. Drone'nun hafifçe zıplamasına neden olan bazı zemin etkileri olabilir, ancak endişelenmeyin.
- Drone'yu yerden kaldırmak ve kontrollere alışmak için gaz ekleyin - belirli bir yarıçap içinde tutmaya çalışın ve stick / joystick hareketlerinize nasıl tepki verdiğini görün.
- Küçük, kademeli ve akıcı hareketler yapın - çok ani bir şey değil. Bir kazayı önlemek için gaz kolunu indirin.
- Drone'nuz beklendiği gibi davranmıyorsa (örneğin, "Pitch" eksenini hareket ettirmek onun eğimine yol açar ve ayrıca sola veya sağa yuvarlanır), bir sorun vardır ve tespit edilen sorunların nedenleri...
- Drone beklendiği gibi davranırsa, göreviniz yerden 1,2-2 metre yükseklikte konumunu sabit bir şekilde tutmaktır. Bu kadar çabuk sinirlenme.


.Ek uçuşlar
Artık arızaları çözdüğünüze ve uçtuğunuza göre kontrollü bir ortamda rahatça ikinci uçuşa geçebilirsiniz.
- Drone hala tam olarak test edilmediğinden, uzun sürmemesi gereken ilk uçuş için tam uçuş öncesi prosedürden geçmenizi öneririz.
- Düzgün hareketler kullanarak, drone'u güvenli bir mesafede tutarak sopa/sopa hareketlerinize nasıl tepki vereceğine alışın.
- Bir drone pilotluğuna adaptasyon, FPV ve çeşitli sensörlerin yardımı olmadan yapılmalıdır.







