Quadcopter nedir?
Bir quadrocopter, bir tür multikopterdir. Bir multikopter, ana rotoru çapraz olarak zıt yönlerde dönen çok motorlu veya çok rotorlu bir uçaktır (helikopter). Multikopterler, motor sayısına (veya rotor sayısına) göre farklılık gösterir. Günümüzde üç veya daha fazla rotorlu multikopterler kullanılmaktadır.
En yaygın şemalar şunlardır: 4/6/8 rotor. Üç rotorlu pervaneli bir aparata trikopter denir; dörtlü - bir quadcopter; altı - bir hexacopter ve sekiz rotorlu - bir octocopter. Planların her birinin kullanımı, temel olarak - yükün kütlesi veya daha basit olarak, multikopterin gemide alabileceği ağırlık gibi bir parametreyi belirler.
Modern çok rotorlu çözüm örnekleri.
Farklı fiyat nişlerinden modern çok rotorlu çözümler:




Tarihten
Her şey 1922'de Rus-Amerikalı uçak tasarımcısı Georgy Aleksandrovich Botezat ile başladı. Türünün ilk çalışan quadcopter'ını kim icat etti. Aparatı sadece yerden kalkmakla kalmadı, aynı zamanda bir süre havada da dayanabildi. O zaman, bu tür cihazların önemli bir dezavantajı vardı - çalışma prensibi.

Dört rotordan sadece biri öndeydi (dönüş içten yanmalı motor tarafından ayarlandı), yani. karmaşık bir şanzıman aracılığıyla tork, bir motor tarafından diğer 3 ana rotora iletildi. Seri geliştirmeye gelmedi. Ve "Kuyruk rotoru" ve "Swashplate" gibi icatlar, daha sonra dünyanın ilk helikopterini yaratan çok rotorlu uçakların gelişimini tamamen terk etmeye zorladı.
21. yüzyılın gelmesiyle birlikte multikopterler, insansız hava araçları veya insansız hava araçları olarak hayatımıza girmiştir.
Multikopterlerin ana bileşenleri
Teknik olarak, yaklaşık 5 yıl önce, multikopterlerin (dronlar) üç ana bileşeni ortaya çıktı:
- Batarya - lityum polimer (LiPo), daha az sıklıkla lityum iyon (Li-Ion).
- Fırçasız veya fırçalanmış nadir toprak motorları.
- Uzaktan kumanda (Kontrol Paneli / Donanım / Verici)

Çalışma prensibi
Modern bir multikopterin çalışma prensibi şu şekildedir: basit. Uygulama şemasına bağlı olarak (3/4/6/8-rotor), her rotor bir elektrik motoru (elektrik motoru) tarafından tahrik edilir. Motorların bir yarısı vidaları saat yönünde, diğer yarısı ise saat yönünün tersine döndürür. Bu yaklaşım sayesinde, multikopteri kontrol etmek için drone'da bir kuyruk rotoru ve karmaşık bir eğik plaka kullanılması gerekli değildir.
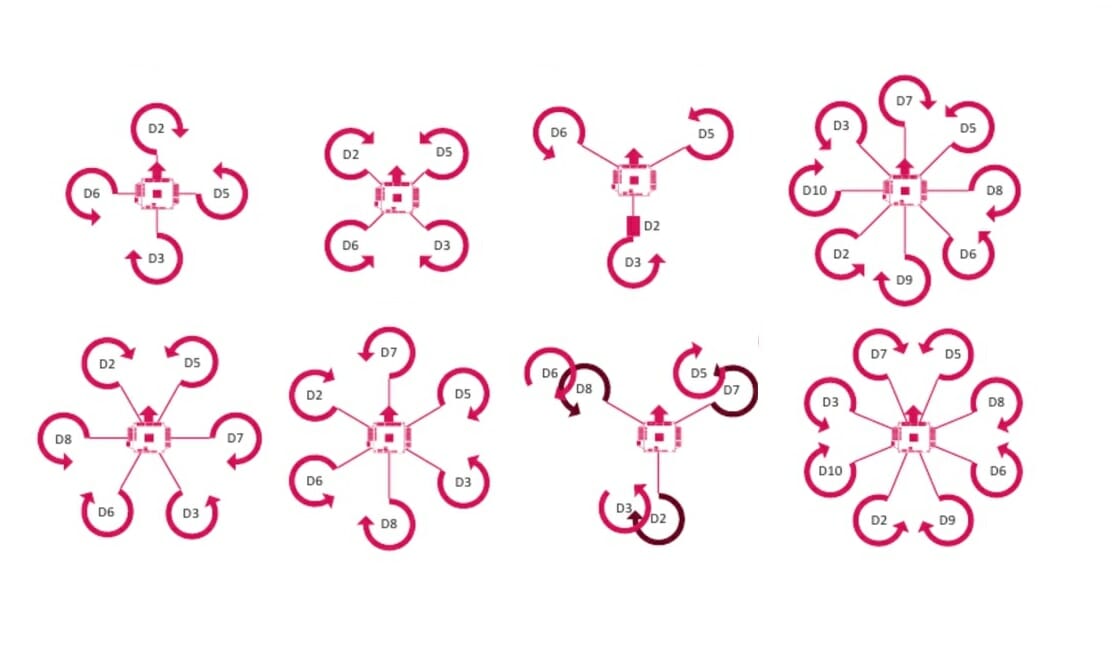
* Multikopter rotorunun dönüş yönünün sırası.
Uçuş kontrol örneği:
- Tüm rotorlarda devri artırın - kaldırın.
- Tüm rotorlarda hızda azalma - azalma.
- Vidaların bir yarısının dönüşlerini artırmak ve diğer yarısının dönüşlerini azaltmak hareketi yana doğru ayarlayacaktır.
- Saat yönündeki pervaneler için RPM'yi artırmak ve saat yönünün tersine pervaneler için RPM'yi azaltmak drone'u döndürecektir.
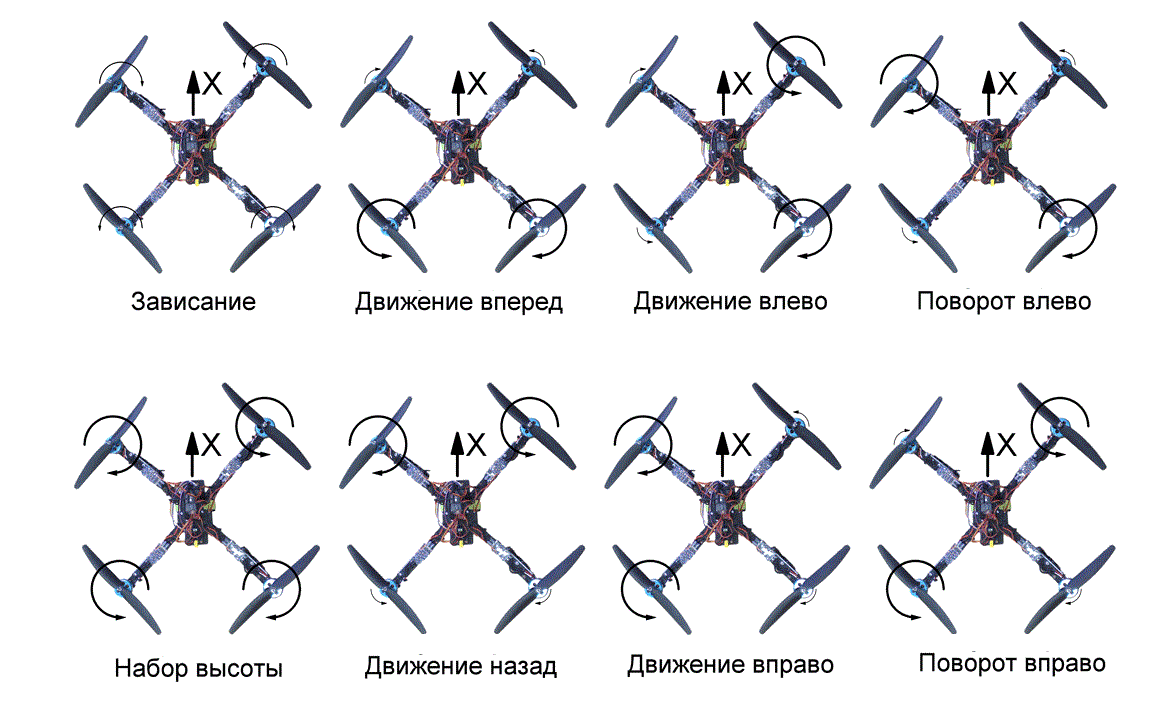
* Rotorların dönüşü için uçuş kontrol şeması.
Motorlar
Modern multikopterlerde (dronlar) şu anda iki tip elektrik motoru kullanılmaktadır - fırçalı ve fırçasız. Fırçasız dronlar esas olarak pahalı ve profesyonel dronlarla donatılmıştır. Sadece bütçe seçenekleri ve oyuncaklar toplayıcı motorlarla donatılmıştır. Farklılıkları hakkında daha fazla ayrıntı burada bulunabilir

Kontrol
Multikopter, giden radyo dalgaları aracılığıyla bir uzaktan kumanda (diğer adıyla uzaktan kumanda, ekipman, verici ) tarafından kontrol edilir (genellikle, 2.4GHz veya 5.8GHz frekanslarında).
Multikopterin kontrol paneli taleplerine yanıt vermesini sağlamak için, drone, eksiksiz bir elektronik sistem kompleksi ile donatılmıştır:
- Mikroişlemci ( uçuş kontrolörü
- Jiroskop - dronun uçuş sırasındaki kararlı davranışından sorumludur (kural olarak, 6 yön ekseni boyunca stabilizasyon sağlar).
- İvmeölçer - Bu sensör, işlemcinin uçağı yere göre yatay bir konumda konumlandırmasını sağlar.
- Barometrik sensör (barometre) - drone'a pilotun seçtiği irtifada sabit bir havada durmasını sağlar.
- Sonar (ultrasonik sensör) - otomatik iniş sağlar ve küçük bir yükseklik (1.5 - 3.5 metre) sağlar, ayrıca engellerin etrafından uçmak için de kullanılabilir.
- GPS modülü - uydu sistemlerinden alınan verileri kullanarak drone'nun coğrafi konumunu sağlar. Varlığı sayesinde noktalarla uçma, iletişim kaybı veya pil şarjının düşük olması durumunda kalkış yerine geri dönme işlevi gerçekleştirilir ve ayrıca hem uçuş sırasında hem de sonrasında uçuş okumaları almanıza olanak tanır..
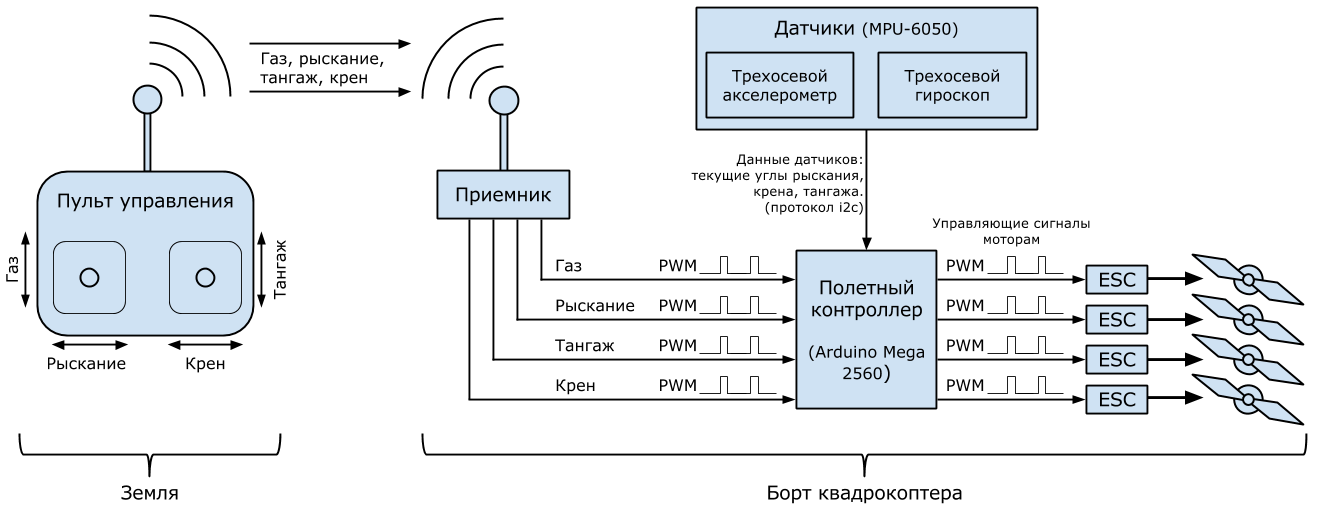
* Bir quadrocopter cihazının en basit şeması.
Ne bunlar?
Şu anda, tüketici drone pazarı çok sayıda multikopter (drone) sunuyor, ancak genel olarak üç büyük gruba ayrılabilir: Yeni Başlayanlar için / Amatör / Profesyonel
Yeni başlayanlar için - ilk tanışma ve öğrenme amacıyla hem çocuklar hem de yetişkinler için uygundur. Kural olarak, bir mikroişlemci, 6 eksenli bir jiroskop ve irtifa tutmayı sağlamak için basit bir barometrik sensör ile donatılmıştır.
Amatör - İHA'larla halihazırda deneyimi olan pilotlar için. Belirli bir uygulama için daha uygundur. Örneğin, hava fotoğrafçılığı veya drone yarışı gibi sporlar için. Bu gruptaki drone'lar otonom uçuş ve anket fonksiyonlarına sahip olabilir.
Profesyonel - Profesyonel alanda multikopterlerin (drone) yeteneklerini kullanan deneyimli pilotlar için özel olarak uygundur. Örneğin, profesyonel fotoğraf ve video çekimi, jeodezi, arazi, trafik izleme, kurtarma operasyonlarında vb. Çoğu durumda, dronların otonom uçuş ve anket işlevleri vardır. Elektronik dolum, uzun mesafelerde çıkarma sağlayan yüksek hassasiyetli modern sistemlerden monte edilmiştir ve güç kaynağı, uçuşta çok daha fazla zaman geçirmenizi sağlar. Bu tür multikopterler arasındaki karakteristik fark, fiyatlarıdır.
İnsansız sistemlerle daha kapsamlı bir tanışma için, "Drone nedir?" konusunu öneriyoruz.
.






