Conteúdo
- Drone DIY: Lição 1. Terminologia.
- Drone "faça você mesmo": Lição 2. Quadros.
- Drone faça você mesmo: Lição 3. Usina de energia.
- Drone faça você mesmo: Lição 4. Controlador de vôo.
- Drone faça você mesmo: Lição 5. Montagem.
- Drone "faça você mesmo": Lição 6. Verificação de desempenho.
- Drone faça você mesmo: Lição 7. FPV e distância.
- Drone com suas próprias mãos: Lição 8. Aviões.
Introdução
Agora que você selecionou ou construiu uma estrutura, a próxima etapa é selecionar o trem de força correto. Como a maioria dos drones existentes são elétricos, vamos nos concentrar em gerar propulsão puramente elétrica por meio de motores CC sem escovas. A usina inclui motores, rotores (hélices, props abreviados), ESC e uma bateria de armazenamento.
1. Motor
De quais motores você usa em sua montagem, vai depender da carga máxima que o drone pode levantar, bem como quanto tempo ele pode ficar em vôo. A usina deve ser obrigatoriamente constituída por motores da mesma marca e modelo, esta abordagem proporcionará um funcionamento equilibrado. Deve-se notar que mesmo motores absolutamente idênticos (Marca / Modelo) podem ter uma ligeira diferença na velocidade, que é posteriormente nivelada pelo controlador de vôo.
Escovado vs sem escova
Em motores escovados, o rotor enrolado gira dentro do estator no qual os ímãs são rigidamente fixados. Nos motores sem escova, tudo gira; o enrolamento é fixado rigidamente no interior do estator e os ímãs são montados no eixo e giram. Na maioria dos casos, você só considerará motores DC sem escovas (BC). Motores desse tipo são amplamente usados na indústria de rádio amador para montar produtos que variam de helicópteros e aviões a sistemas de acionamento em carros e barcos.
Os motores sem escova tipo panqueca são maiores em diâmetro, mais planos e geralmente têm alto torque e menor KV (detalhes abaixo). Os UAVs de pequeno porte (geralmente do tamanho da palma da mão) costumam usar motores pequenos com escovas devido ao seu custo mais baixo e ao controlador simples de dois fios. Embora os motores sem escovas tenham tamanhos e especificações diferentes, escolher um tamanho menor não significa que será mais barato.

Inrunner vs Outrunner
Existem vários tipos de motores DC sem escova:
- Inrunner é um rotor interno. O enrolamento é fixado no estator, os imãs são montados no eixo do rotor, que gira (normalmente utilizado em barcos RC, helicópteros e carros devido ao alto KV).
- Outrunner - rotor externo. Os ímãs são fixados em um estator que gira em torno de um enrolamento estacionário. A parte inferior do motor é fixa.(via de regra, motores deste tipo têm mais torque).
- Hybrid Outrunner - Este é tecnicamente um "Outrunner", mas implementado em um pacote "Inrunner". Esta abordagem tornou possível combinar em um tipo o torque "Outrunner" e a ausência de elementos rotativos externos como nos motores do tipo "Inrunner".
KV
Classificação KV - máx. o número de revoluções que o motor pode desenvolver sem perda de potência em uma dada tensão. Para a maioria dos UAVs com vários rotores, um valor baixo de KV (por exemplo, de 500 a 1000) é relevante, pois ajuda a garantir a estabilidade. Enquanto para o vôo acrobático um valor de KV entre 1000 e 1500 será relevante, em conjunto com rotores de menor diâmetro (hélices). Digamos que o valor de KV para um motor específico seja 650 rpm, então a uma tensão de 11,1 V o motor irá girar a uma velocidade de: 11,1 × 650 = 7215 rpm, e se você usar o motor em uma tensão mais baixa (digamos 7,4 V), então a velocidade de rotação será: 7,4 × 650 = 4810 rpm. É importante observar, entretanto, que usar baixa tensão geralmente significa maior consumo de corrente (Potência = Corrente × Tensão).
Impulso
Alguns fabricantes de motores sem escovas podem especificar nas especificações informações sobre o impulso máximo possível (Impulso) gerado pelo motor em conjunto com o rotor principal recomendado. A unidade de medida para o empuxo é geralmente quilograma (Kg / Kg), libra (Lbs) ou Newton (N). Por exemplo, se você está construindo um quadrocóptero e sabe o valor de empuxo de um único motor = até 0,5 kg em um compartimento com um rotor de 11 polegadas, então na saída quatro desses motores podem ser levantados com empuxo máximo: 0,5 kg × 4 = 2kg. Da mesma forma, se o peso total do seu quadricóptero for ligeiramente inferior a 2 kg, então, com tal usina, ele irá decolar apenas em rpm máximas (empuxo máximo). Nesse caso, será relevante escolher um pacote de motor de rotor mais potente, que proporcionará mais empuxo, ou reduzir o peso total do drone. No máx. empuxo da usina = 2kg, o peso do drone não deve ser mais que a metade deste valor (1kg, incluindo o peso dos próprios motores). Um cálculo semelhante pode ser feito para qualquer configuração. Suponha que o peso do hexacóptero (incluindo estrutura, motores, eletrônicos, acessórios, etc.) seja de 2,5 kg. Isso significa que cada motor para tal conjunto deve fornecer (2,5 kg ÷ 6 motores) × 2 = 0,83 kg de empuxo (ou mais). Agora você sabe calcular o impulso ideal dos motores com base no peso total, mas antes de tomar uma decisão, sugerimos que se familiarize com as seções abaixo.
Considerações adicionais
- Conectores: Os motores DC com escovas têm dois conectores "" e "-". Mudar os fios em alguns lugares muda a direção de rotação do motor.
- Conectores: Os motores CC sem escova têm três conectores. Para saber como conectá-los, bem como alterar a direção de rotação, consulte a seção ESC abaixo.
- Enrolamentos: Os enrolamentos afetam o KV dos motores. Se você precisa do valor de KV mais baixo, mas dá prioridade ao torque, é melhor voltar sua atenção para os motores DC sem escova do tipo Pancake.
- Montagem: A maioria dos fabricantes tem um diagrama de fiação geral para motores CC para motores CC, o que permite que as empresas de estrutura evitem fazer os chamados adaptadores. O gabarito é geralmente métrico, com dois orifícios separados por 16 mm e mais dois orifícios separados por 19 mm (90 ° em relação ao primeiro).
- Rosca: A rosca de montagem usada para conectar o motor sem escovas à estrutura pode variar. Os tamanhos métricos usuais de parafusos são M1, M2 e M3, os tamanhos imperiais podem ser 2-56 e 4-40.
2. Rotores principais (hélices)
Os rotores principais (hélices, hélices abreviadas) para UAVs com múltiplos rotores originam-se das hélices de aeronaves controladas por rádio. Muitos perguntarão: por que não usar hélices de helicóptero? Mesmo que isso já tenha sido feito, imagine as dimensões de um hexacóptero com hélices de helicóptero. É importante notar também que o sistema do helicóptero requer uma mudança na inclinação das pás, o que complica significativamente o projeto.
Você também pode perguntar por que não usar um motor turbojato, um motor turbofan, um turboélice, etc.? Certamente eles são incrivelmente bons em fornecer bastante impulso, mas também requerem muita energia. Se a principal preocupação do drone é se mover muito rapidamente em vez de pairar em um espaço confinado, um dos motores acima pode ser uma boa opção.
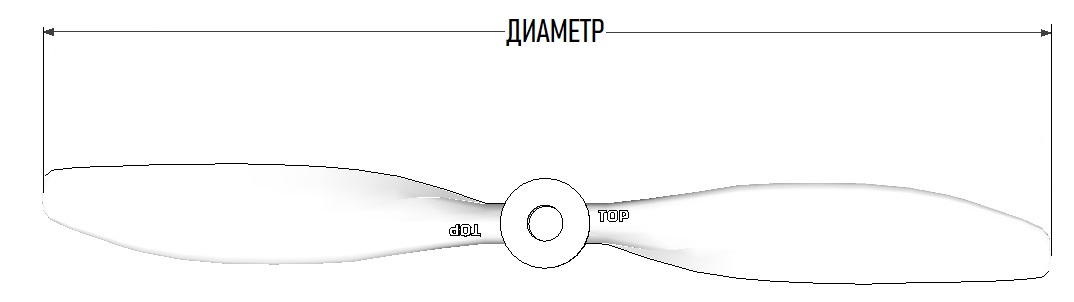
Lâminas e diâmetro
O rotor principal da maioria dos UAVs com múltiplos rotores tem duas ou três lâminas. As hélices mais utilizadas são de duas pás. Não presuma que adicionar mais lâminas aumentará automaticamente o empuxo; cada pá trabalha no fluxo perturbado pela pá anterior, reduzindo a eficiência da hélice. O rotor principal de pequeno diâmetro tem menos inércia e, portanto, é mais fácil de acelerar e desacelerar, o que é importante para o vôo acrobático.

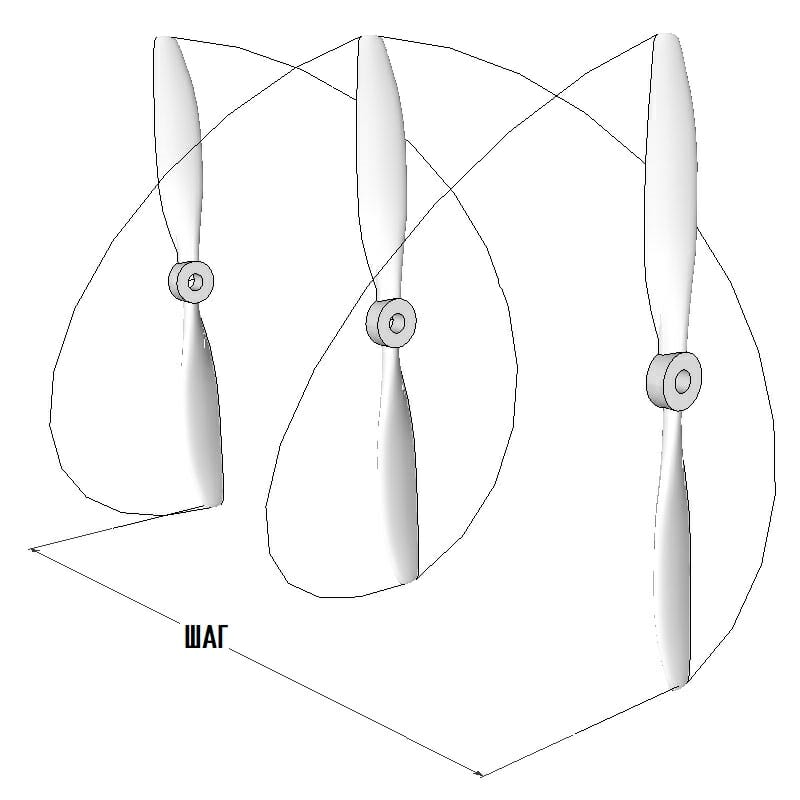
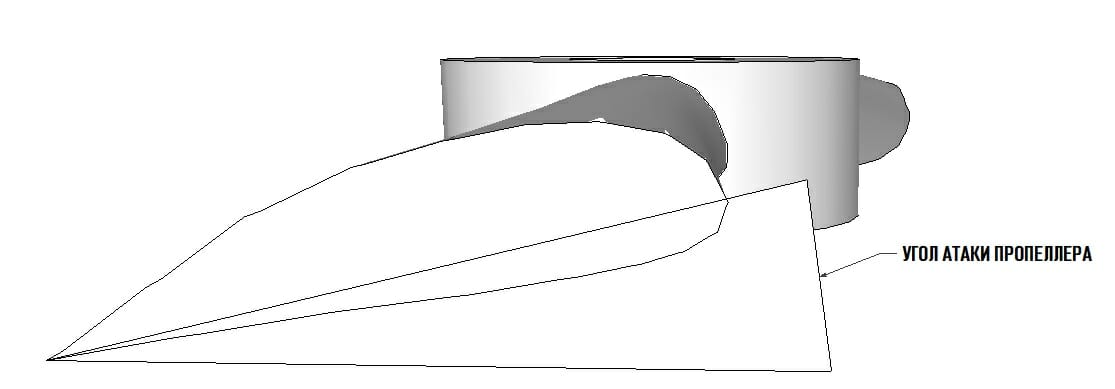
Passo / Ângulo de Ataque / Eficiência / Impulso
O impulso gerado pelo o rotor principal depende da densidade do ar, do número de rotações da hélice, do seu diâmetro, da forma e da área das pás, bem como do seu passo. A eficiência de uma hélice está relacionada ao ângulo de ataque, que é definido como o passo da pá menos o ângulo da hélice (o ângulo entre a velocidade relativa resultante e a direção de rotação da pá). A própria eficiência é a relação entre a potência de saída e a potência de entrada. A maioria das hélices bem projetadas são mais de 80% eficientes. O ângulo de ataque é influenciado pela velocidade relativa, de modo que a hélice terá diferentes eficiências em diferentes velocidades do motor. A eficiência também é fortemente afetada pela borda de ataque da pá do rotor principal e é muito importante que seja o mais lisa possível. Embora um projeto de passo variável seja o melhor, a complexidade adicional exigida sobre a simplicidade inerente do multi-rotor significa que uma hélice de passo variável quase nunca é usada.
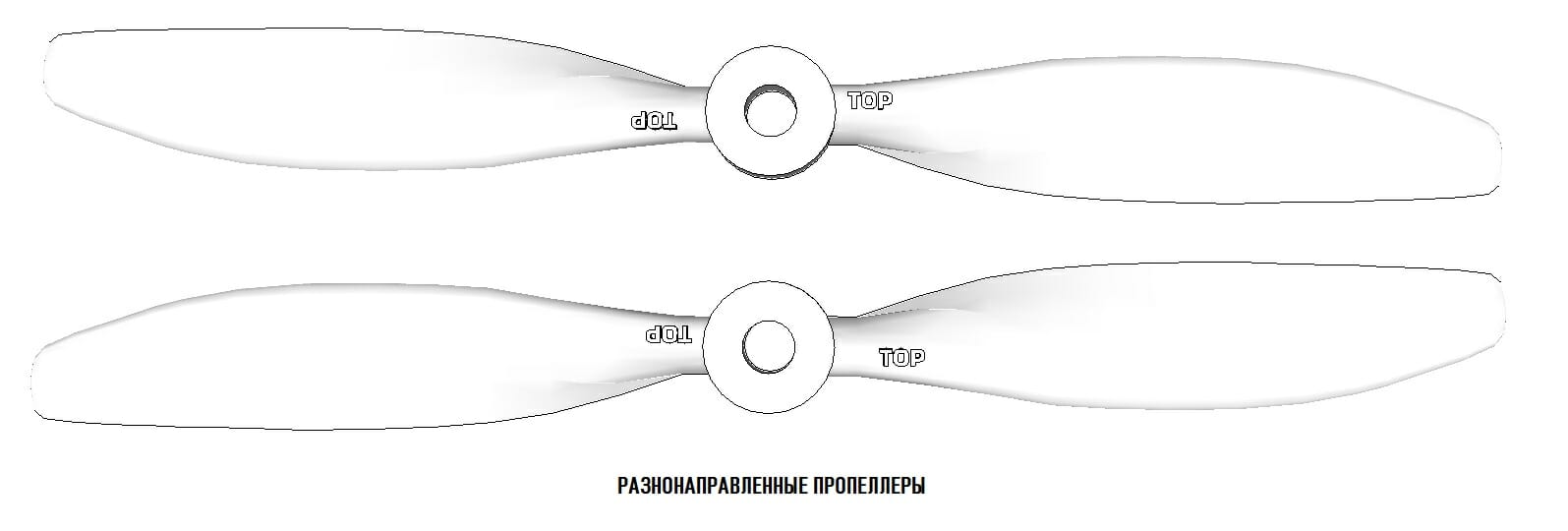
Rotação
Os rotores são projetados para rotação no sentido horário (CW) ou anti-horário (CCW). O sentido de rotação é indicado pela inclinação da pá ( olhe para a hélice da extremidade traseiraVtailY6X8
Materiais de execução
Os materiais usados para a fabricação de rotores (hélices) podem ter um efeito moderado no vôo desempenho, mas segurança deve ser uma prioridade, especialmente se você for um iniciante e inexperiente.
- Plástico (ABS / Nylon, etc.) é a escolha mais popular quando se trata de UAVs multimotores. Isso se deve em grande parte ao baixo custo, às características de vôo decentes e à durabilidade exponencial. Normalmente, no caso de uma colisão, pelo menos uma hélice está quebrada e, enquanto você domina o drone e aprende a voar, sempre terá muitas hélices quebradas. A rigidez e a resistência ao impacto do parafuso de plástico podem ser melhoradas reforçando com fibra de carbono (carbono), esta abordagem é máx. eficaz e não tão caro em comparação com uma hélice completa e de fibra de carbono.
- Polímero reforçado com fibra (fibra de carbono, nylon reforçado com carbono, etc.) - é a tecnologia "avançada" em muitos relacionamento. As peças de fibra de carbono ainda não são muito fáceis de fabricar e, portanto, você paga mais por elas do que por uma rosca de plástico comum com parâmetros semelhantes. Uma hélice feita de fibra de carbono é mais difícil de quebrar ou dobrar e, portanto, se ela falhar, causará mais danos a qualquer coisa com a qual entrar em contato. Ao mesmo tempo, as hélices de carbono são geralmente bem feitas, mais rígidas (proporcionando perda mínima de eficiência), raramente precisam de equilíbrio e são mais leves do que qualquer outro material. Recomenda-se considerar tais hélices somente depois que o nível de pilotagem do usuário se tornar confortável.
- A madeira é um material raramente utilizado para a produção de rotores UAV multirrotores, uma vez que sua fabricação requer processamento mecânico, o que mais tarde torna as hélices de madeira mais caras do que as de plástico. Ao mesmo tempo, a árvore é bastante forte e nunca se curva. Observe que hélices de madeira ainda são usadas em aeronaves controladas por rádio.



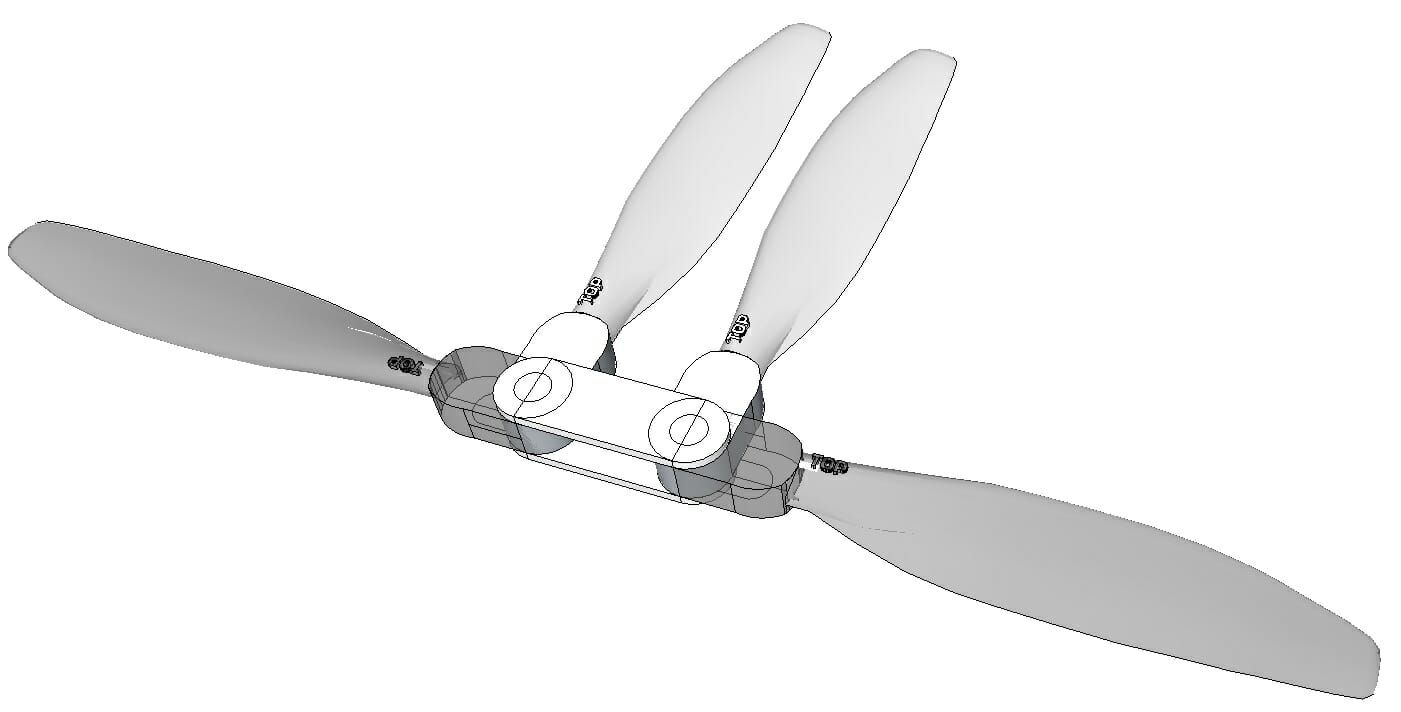
Dobrável
Os suportes dobráveis têm uma parte central que se conecta a duas lâminas giratórias. Quando o centro (que está conectado ao eixo de saída do motor) gira, as forças centrífugas atuam nas pás, empurrando-as para fora e essencialmente tornando a hélice "rígida", com o mesmo efeito de uma hélice não dobrável clássica. Devido à baixa demanda e um grande número de peças necessárias, hélices dobráveis são menos comuns. A principal vantagem dos suportes dobráveis é a compactação e, em combinação com uma estrutura dobrável, as dimensões de transporte do drone podem ser significativamente menores do que as dimensões de voo. Uma vantagem concomitante do mecanismo de dobramento é a ausência da necessidade, em caso de colisão, de trocar totalmente a hélice, bastando trocar apenas a pá danificada.
Instalação
Como os UAVs, os rotores podem ter uma ampla gama de tamanhos. Portanto, há uma série de diâmetros de eixo de motor “padrão” na indústria. Nesta conexão, o rotor principal é frequentemente fornecido com um pequeno conjunto de anéis adaptadores (eles se parecem com arruelas com orifícios de diâmetros diferentes no centro), que são instalados no furo central da escora
O parafuso pode ser fixado ao motor com base no método de montagem suportado pelo motor. Caso o eixo do motor não implique nenhuma opção de fixação (conexão roscada, diversos dispositivos de fixação, etc.), são utilizados adaptadores especiais, como protetores de sustentação e pinças.
- Propsaver
- Mandril porta-pinças
Motores sem escova com rotor externo (tipo "Outrunner"), via de regra, na parte superior do mesmo, possuem diversos orifícios roscadosé uma opção igualmente popular para prender a hélice ao eixo do motor BC
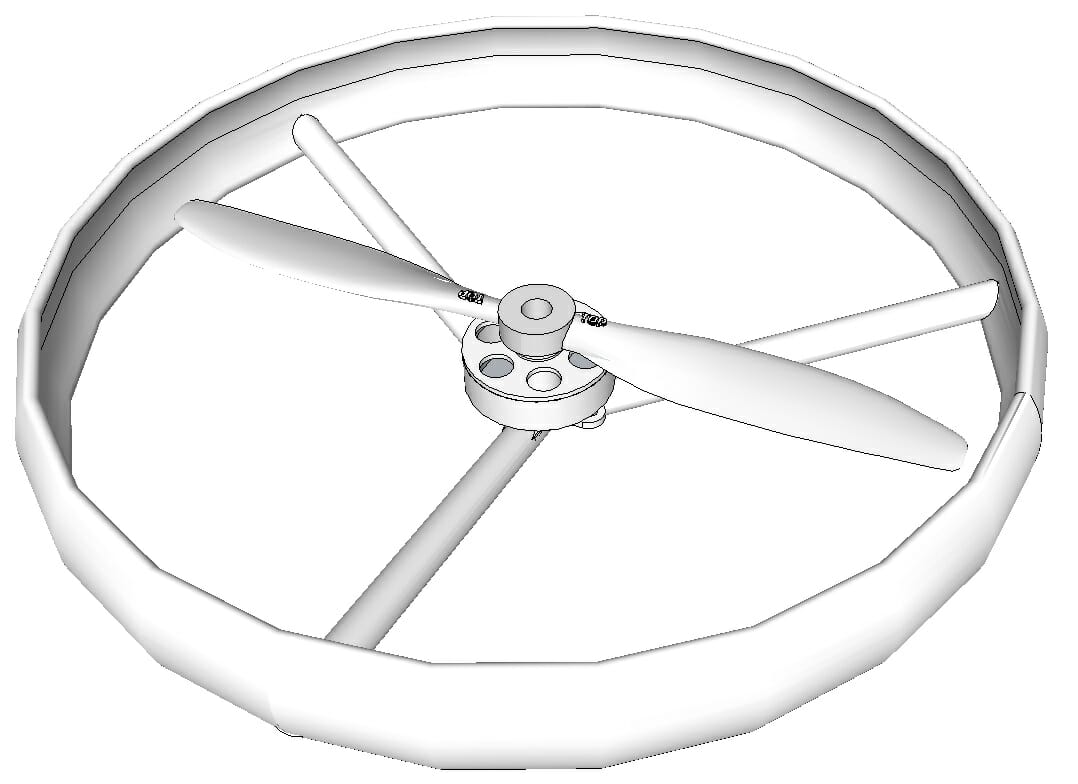
Proteção de rotores
Proteção de rotores - projetado para excluir o contato direto da usina de energia do UAV com um objeto que se aproxima, preservando assim sua integridade e operabilidade, bem como para evitar ferimentos em hélices girando rapidamente como resultado de colisões com pessoas e animais. As proteções da hélice são fixadas à estrutura principal. Dependendo da versão, ele pode se sobrepor parcialmente à área de trabalho da usina ou totalmente (proteção em anel). A proteção da hélice é mais frequentemente usada em pequenos UAVs (de brinquedo). O uso de elementos de proteção na montagem também traz uma série de compromissos, incluindo:
- Pode causar vibração excessiva.
- Geralmente resiste a golpes leves.
- Pode reduzir o empuxo se muitos pés de montagem forem colocados sob a hélice.
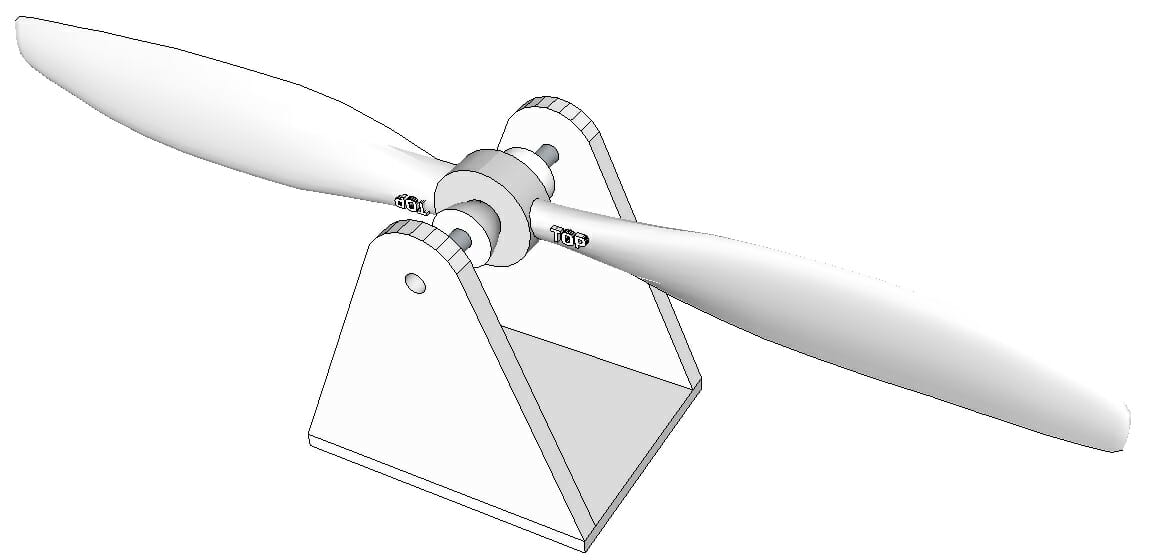
Balanceamento
Balanceamento deficiente ocorre na maioria das hélices de baixo custo. Para ter certeza disso, não é preciso ir muito longe, basta inserir um lápis no furo central do parafuso (via de regra, em um desequilíbrio, um lado fica mais pesado que o outro). Portanto, é altamente recomendável equilibrar seus adereços antes de instalá-los nos motores. Uma hélice desequilibrada causará vibrações excessivas, que por sua vez afetam negativamente o desempenho do controlador de vôo (manifestado no comportamento incorreto do drone em vôo), sem mencionar um aumento no ruído, aumento do desgaste dos elementos da usina e uma deterioração no qualidade de filmar uma câmera suspensa.
A hélice pode ser contrabalançada de diferentes maneiras, mas se você estiver construindo um drone do zero, então, no arsenal de ferramentas deve haver um balanceador de hélice barato que permite que você determine fácil e simplesmente o desequilíbrio de peso na hélice. Para equalizar o peso, você pode moer a parte mais pesada do suporte (a parte central da lâmina é lixada uniformemente e em nenhum caso cortar a parte da hélice), você também pode equilibrar colando um pedaço de fita (fina) na lâmina mais leve (adicione os segmentos uniformemente até atingir o equilíbrio). Observe que quanto mais longe do centro você fizer uma atualização de balanceamento (lixar ou adicionar uma correia) da hélice, maior será o efeito baseado no princípio de torque.
3. ESC
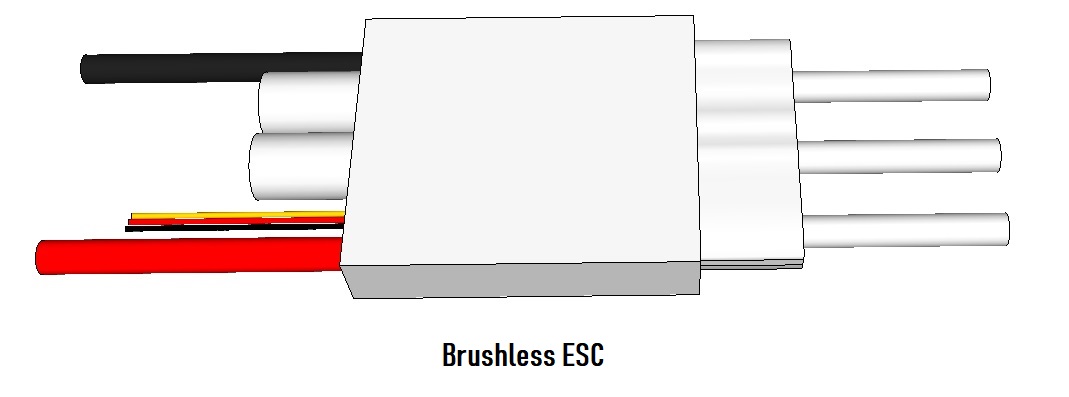
ESC (Controlador eletrônico de velocidade inglês; rus.controlador de velocidade eletrônico) - permite que o controlador de vôo controle a velocidade e a direção do motor. Com a tensão correta, o ESC deve ser capaz de suportar no máx. a corrente que o motor pode consumir e também limitar a corrente que passa pela fase durante a comutação. A maioria dos ESCs de drones só permitem que o motor gire em uma direção, no entanto, com o firmware correto, eles podem operar em ambas as direções.
Conexão
Inicialmente, o ESC pode ser confuso porque existem vários fios / pinos / conectores disponíveis para conectá-lo. Dois lados (ESC pode vir com ou sem conectores soldados).
- Fonte de alimentação: Dois fios grossos (geralmente preto e vermelho) são fornecidos para fornecer energia a partir do quadro / chicote de distribuição, para o qual a energia vem diretamente da bateria principal da aeronave.
- 3 conectores: Três conectores estão disponíveis no lado oposto do controlador para conectar a três conectores de bala (geralmente fornecidos com motores) em um motor sem escova. O uso de conectores na conexão do ESC permite, se necessário (em caso de falha), trocar rapidamente o controlador sem o uso de ferro de soldar. Acontece que os conectores em forma de bala que acompanham o motor não coincidem com os conectores do regulador, nesse caso, basta substituí-los por outros adequados. Qual dos três é "mais" e qual é "menos"? O ponto de referência é um fio positivo simples que sai da bateria e entra em positivo no ESC, da mesma forma com um sinal de menos.
- Servo-conector R / C de 3 pinos com fios finos: através do qual o sinal proveniente do receptor é processado, sendo um fio de sinal (transmissão do sinal de gás para o ESC ou entrada), o segundo "Menos" (ou terra) e um fio positivo (não usado se não houver BEC embutido; com BEC embutido, é uma saída de energia de 5 V, que pode mais tarde ser usada para alimentar eletrônica embarcada).
BEC
Nos primeiros dias da modelagem da aeronave, um motor de combustão interna era usado como usina de energia, e a eletrônica a bordo era alimentada por um pequeno bateria. Com o advento da tração elétrica e dos controladores (ESC), neste último, passaram a incluir o chamado circuito de eliminação de bateria - BEC (em inglês. Circuito Eliminador de Bateria; ou conversor de potência a bordo; via de regra, fornece uma fonte de corrente adicional com uma tensão de 5 V em uma corrente de 1A ou superior). Em outras palavras, é um conversor de voltagem usado na montagem LiPo em uma voltagem para alimentar a eletrônica de bordo do drone.
Ao montar o multirotor, todos os ESCs devem ser conectados ao controlador de vôo, mas apenas um BEC é necessário, caso contrário, podem surgir problemas ao alimentar as mesmas linhas. Como geralmente não há como desabilitar o BEC em um ESC, é melhor remover o fio vermelho () e envolvê-lo com fita isolante para todos, exceto um ESC. Também é importante deixar o fio preto (terra) para o aterramento comum.
Firmware
Nem todos os ESCs no mercado são igualmente bons para aplicações com múltiplos rotores. É importante entender que antes do advento dos UAVs multimotores, os motores sem escova eram usados principalmente como uma usina de energia para carros, aviões e helicópteros controlados por rádio. A maioria não requer tempos de resposta rápidos ou atualizações. ESCs com software embutido SimonK ou BLHeli são capazes de reagir muito rapidamente às mudanças que chegam, o que geralmente faz a diferença entre vôo estável ou acidente.
Distribuição de energia
Uma vez que cada ESC é alimentado pela bateria principal, o conector da bateria principal deve de alguma forma ser dividido em quatro ESCs. Isso é feito usando o Quadro de distribuição de energiaChicote de distribuição de energiaDeans
4. Bateria
Química
As baterias usadas em veículos aéreos não tripulados são atualmente exclusivamente polímero de lítio (LiPo), e a composição de algumas delas é bastante exótica - manganês de lítio ou outro lítio variantes. O ácido de chumbo simplesmente não é adequado e NiMh / NiCd ainda são muito pesados para sua capacidade e muitas vezes não podem fornecer as altas taxas de descarga exigidas. LiPo oferece alto desempenho e taxa de descarga com baixo peso. As desvantagens são seu custo relativamente alto e problemas de segurança constantes (risco de incêndio).
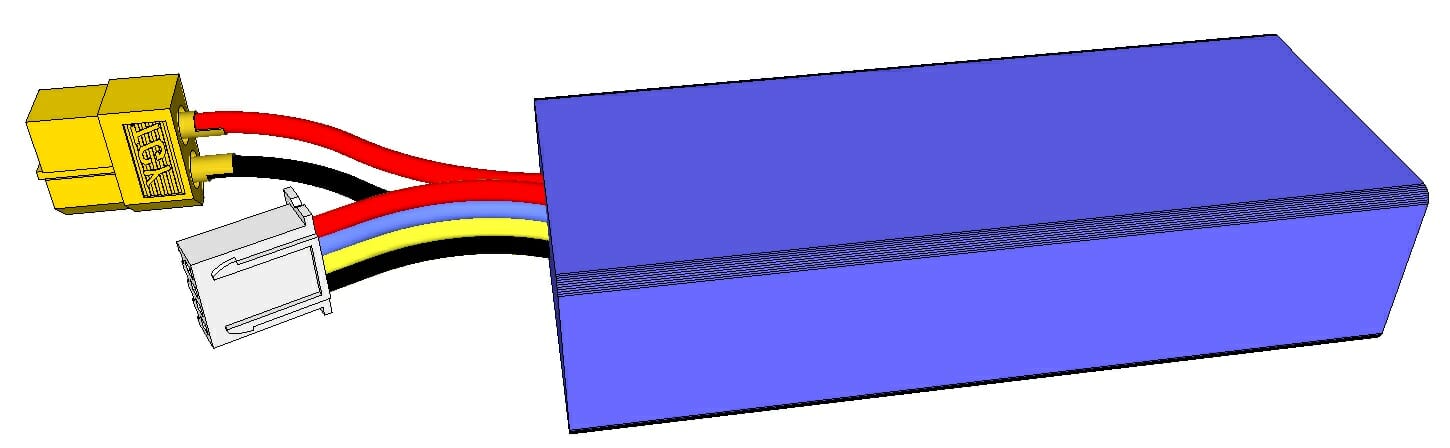
Voltagem
Na prática, você só precisa de uma bateria para o seu UAV. A tensão desta bateria deve corresponder aos motores BK que você selecionou. Quase todas as baterias usadas hoje são baseadas em lítio e contêm várias células (latas) de 3,7 V cada, onde 3,7 V = 1S (ou seja, bateria de uma lata; 2S é duas latas, etc.). Portanto, uma bateria rotulada como 4S provavelmente terá um valor nominal de 4 × 3,7 V = 14,8 V. Além disso, o número de latas o ajudará a determinar qual carregador usar. Observe que uma bateria de célula única de alta capacidade pode parecer fisicamente uma bateria de célula única de baixa capacidade.
Capacidade
A capacidade da bateria é medida em amperes-hora (Ah). As baterias pequenas podem ter uma capacidade de 0,1Ah (100mAh), a capacidade da bateria para drones de tamanho médio pode variar de 2-3Ah (2000mAh - 3000mAh). Quanto maior for a capacidade, maior será o tempo de voo e, consequentemente, mais pesada será a bateria. O tempo de voo de um UAV convencional pode estar na faixa de 10-20 minutos, o que pode parecer curto, mas você deve entender que o drone luta constantemente com a gravidade durante o voo e, ao contrário de um avião, não tem superfícies (asas) que fornecem assistência na forma de força de levantamento ideal.
Taxa de descarga
A taxa de descarga da bateria de lítio é medida em "C", onde 1C é a capacidade da bateria (geralmente em amperes-hora, a menos que você esteja considerando um drone do tamanho de Palma). A taxa de descarga da maioria das baterias LiPo é de pelo menos 5 ° C (cinco vezes a capacidade), mas como a maioria dos motores usados em UAVs com múltiplos rotores consomem muita corrente, a bateria deve ser capaz de descarregar com uma corrente incrivelmente alta, que geralmente é cerca de 30A ou mais.
Segurança
As baterias LiPo não são totalmente seguras, pois contêm gás hidrogênio pressurizado e têm uma tendência de queimar e / ou explodir quando algo está errado. Portanto, se você tiver alguma dúvida sobre a integridade da bateria, não a conecte de forma alguma ao drone ou mesmo a um carregador - considere-a "desativada" e descarte-a de maneira adequada. Os sinais indicadores de que algo está errado com a bateria são amassados ou inchaço (ou seja, vazamento de gás). Ao carregar uma bateria LiPo, é melhor usar uma caixa LiPo segura (Caixa segura de bateria). O armazenamento da bateria

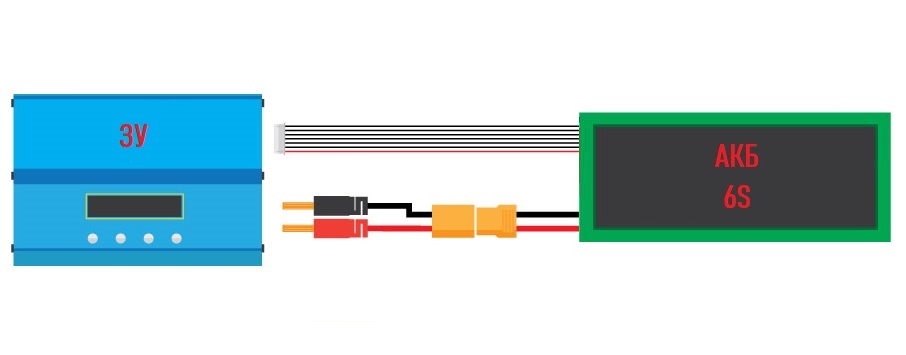
Carregando
A maioria das baterias LiPo tem dois conectoresO carregadoras questões de segurança associadas às baterias de polímero de lítio
.Montagem
A bateria é o elemento mais pesado do drone, por isso deve ser instalada no ponto morto central para garantir a mesma carga nos motores. A bateria não envolve nenhuma montagem especial (especialmente parafusos auto-roscantes que podem danificar o LiPo e causar um incêndio), portanto, alguns métodos de montagem usados hoje incluem tiras de velcro, borracha, compartimentos de plástico e outros. A opção mais comum de montagem da bateria é pendurar a bateria sob a estrutura usando uma tira de velcro.







