Conteúdo
- Drone DIY: Lição 1. Terminologia.
- Drone "faça você mesmo": Lição 2. Quadros.
- Drone faça você mesmo: Lição 3. Usina de energia.
- Drone faça você mesmo: Lição 4. Controlador de vôo.
- Drone faça você mesmo: Lição 5. Montagem.
- Drone faça você mesmo: Lição 6. Verificação de desempenho.
- Drone "faça você mesmo": Lição 7. FPV e distância.
- Drone com suas próprias mãos: Lição 8. Aviões.
Introdução
Na Lição 5, você tinha que terminar de montar o drone (sem instalar hélices). Não tenha pressa, pois mesmo pequenos erros podem causar um travamento. Você ainda tem algumas etapas antes de seu primeiro voo, então seja paciente e siga as orientações abaixo. Como na lição anterior, continuaremos assumindo que você usa equipamento de controle de rádio para interagir com o UAV (como o método de controle mais amplamente usado no momento).
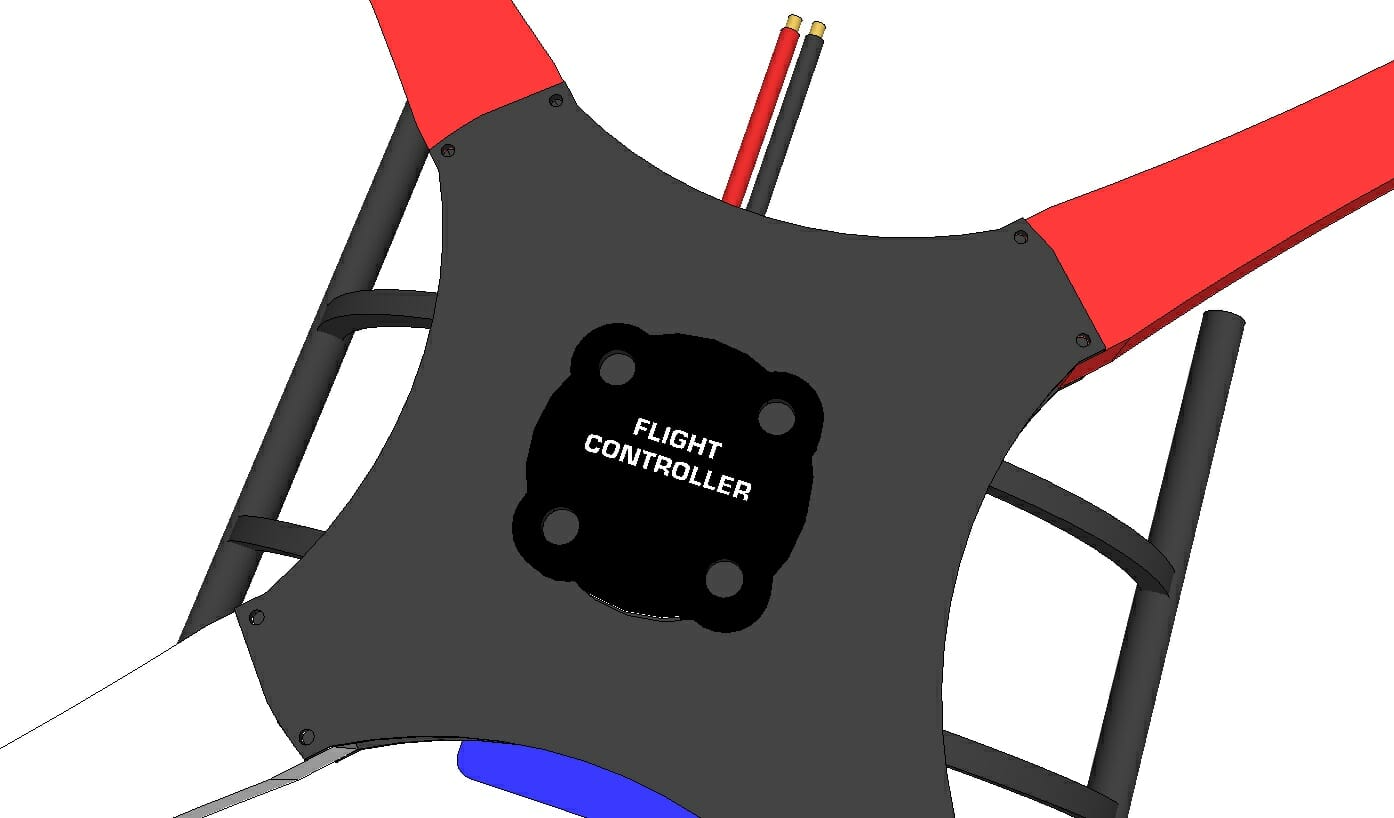
Controlador de vôo
- Nem todos os controladores de vôo são iguais, então o procedimento de configuração realmente depende do modelo que você escolher. Se ainda não o fez, leia atentamente o manual do usuário do controlador de vôo selecionado, do início ao fim. Omitir o menor detalhe pode fazer a diferença entre um primeiro voo bem-sucedido e uma baixa total. Um manual do usuário bem escrito deve incluir tudo o que você encontrar nesta página e muito mais, portanto, é recomendável que você use este tutorial como uma lista de verificação e não como uma substituição / alternativa às instruções básicas do desenvolvedor.
- A maioria dos controladores de vôo fornecem um procedimento passo a passo para selecionar as configurações para uma configuração UAV específica, incluindo controle total sobre os valores PID. Os valores para cada um (P, I e D) podem ser ajustados para seu quadro específico e estilo de vôo; de algo mais estável para usar a plataforma em fotografia aérea, a algo mais parecido com voos esportivos (dar cambalhotas, corrida de drones, etc.). Geralmente começa com os valores padrão de cada campo, e se você não tem experiência suficiente para alterá-los, é recomendável deixar tudo como está até o primeiro vôo.
- O manual do controlador de vôo também deve indicar como definir o RPM mínimo do grupo motopropulsor, ou seja, definir a velocidade na qual os motores giram quando são carregados. Inicialmente, você pode definir esse valor relativamente baixo - apenas o suficiente para ver os motores girando, mas não tanto que os UAVs sejam movidos pelo empuxo que geram. O empuxo máximo, se você puder definir esse valor, deve corresponder ao valor máximo que a alavanca do acelerador de seu reator pode fornecer.
- Um aspecto que pode ser discutido no manual do usuário do controlador de vôo sem fazer qualquer sugestão é o modo de vôo. Voltando a Lição 4, "Modo de Voo" determina quais sensores são usados para estabilizar o drone, bem como sua função / propósito. Os sensores mais comuns encontrados em um controlador de vôo são giroscópio, acelerômetro, barômetro, bússola e possivelmente GPS.
- Se este for seu primeiro drone, é altamente recomendado que o modo de vôo mais estável disponível para o seu controlador de vôo, que emprega o maior número de sensores disponíveis para estabilizar o drone, seja altamente recomendado. Em geral, isso ocorre porque as configurações de PID podem estar muito distantes de seu quadro / configurações, por isso é melhor escolher os valores de PID padrão. Se você já voou antes, o modo ACRO (que usa apenas o giroscópio) pode ser o melhor.
- A maioria dos controladores de vôo também permitirá que você altere o "modo de vôo" em vôo por meio de um canal de backup. Por exemplo, se o seu controle remoto tiver seis canais, você pode considerar atribuir o canal 5 ou 6 (que geralmente são associados a interruptores) para que você possa alterar o modo de voo durante o vôo do drone. Antes de voar, certifique-se de saber qual posição da chave corresponde a qual modo de voo.
- É altamente desencorajado o uso de voo de hotspot GPS ou quaisquer funções / sensores mais sofisticados (por exemplo, um sensor de distância ultrassônico para determinar a distância ao solo) até que você tenha certeza de que o UAV está bem sintonizado. Alguns manuais sugerem usar apenas o modo ACRO (acrobático), porém, se você não tem experiência significativa de vôo, voar neste modo não será fisicamente possível para você, o modo é o mais difícil de controlar, já que a estabilização está excluída.
Configuração do equipamento de controle
- Alguns consoles têm diferentes modos de operação, como avião, helicóptero, carro, etc. Em 4 (Seção: Controle), discutimos os quatro canais de controle principais: Throttle, Yaw, Pitch e Roll, que geralmente são valores associados a aeronaves ou helicópteros. Se o manual do controlador de vôo não especificar um modo específico para o transmissor, é recomendado usar o modo Avião.
- Existem dois tipos de controle remoto: Modo 1 (Modo 1) e Modo 2 (Modo 2). O Modo 2 (mais comum) com este tipo de controle é Throttle and Yaw associado ao canal / stick / joystick esquerdo, Pitch and Roll com o direito. Você também pode verificar suas atribuições movendo os manípulos diretamente para garantir que os valores não sejam invertidos.
- Os modos do transmissor geralmente adicionam níveis de "deslocamento" de canal / sinal para tornar o movimento mais adequado para um sistema específico, no entanto, a maioria dos controladores de voo se preocupam com qualquer deslocamento e, como tal, prefere valores "brutos". Se o seu transmissor não possui nenhum modo, basta verificar qual canal / stick / joystick é responsável por cada um.
- Um transmissor RC de uso geral só pode fornecer uma faixa limitada de sinais em cada canal e, portanto, nesta lição, recomendamos que você descubra que faixa de valores um transmissor RC pode fornecer e se o mínimo e os valores máximos podem ser ajustados (ou como valores ou como uma porcentagem do intervalo padrão). Por exemplo, os controladores de vôo baseados em MultiWii requerem transmissores que podem fornecer uma faixa completa de pulsos de 500 ms a 2500 ms, enquanto a configuração padrão pode ser de apenas 1000 ms a 2000 ms, pois esta é uma configuração comum para aeronaves R / C. Leia o manual do seu transmissor para saber como definir os pontos finais / faixa do sinal (se aplicável).
- Se o seu controlador tiver um display LCD, muitas vezes você pode fazer isso através da interface em “Configurações”.
- “Teste do equipamento de controle no máx. Distância ”é mais fácil de implementar com a ajuda de um amigo / ajudante ou conecte uma campainha ou outro feedback visual / audível ao drone RC. Alguns modelos de ponta têm uma função de teste de alcance. O objetivo do teste é ver a distância percorrida pelo sinal antes que o receptor não consiga mais captá-lo. Recomenda-se a utilização do teste de alcance somente após o chamado “Fight flight” (Fight flight - o drone é testado para desempenho a curta distância, dentro da linha de visão do piloto-drone). Procedimento de teste de alcance:
- Ligue o equipamento de controle e, em seguida, a aeronave.
- Dê um passo para trás 15 metros e ative o interruptor associado à campainha; Você deve ouvi-lo.
- Se não houver campainha, ligue a aeronave e verifique se os motores estão funcionando.
- Silencie a campainha / rearme o drone
- Repita essas etapas cada vez mais (linha de visão) até que o drone responda à sua entrada.
- Esta será a distância máxima absoluta pela qual você pode voar com seu drone.
- Você pode pensar que não planeja voar tão longe, mas lembre-se de que o drone está se movendo em três eixos e algo pode dar errado.
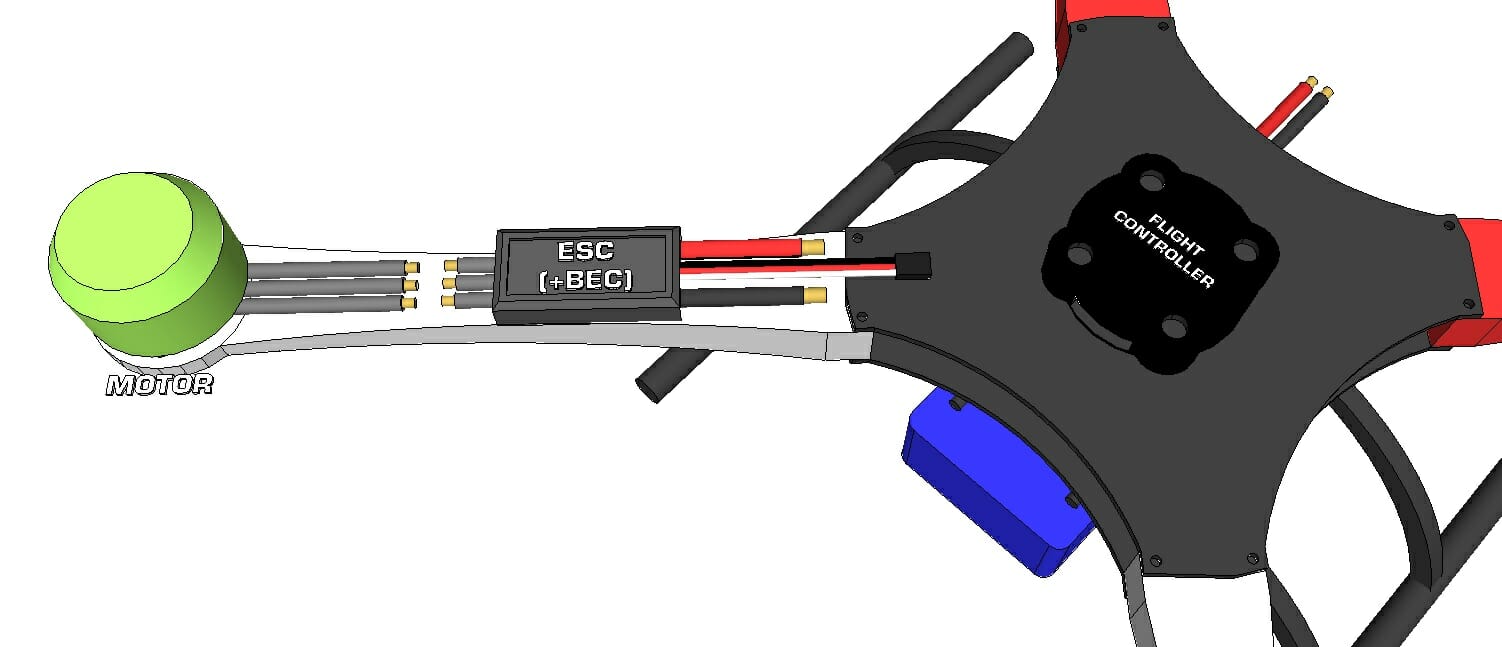
Calibração ESC
ESC funcionará fora da caixa, mas os sinais (PWM / PWM) associados com aceleração mínima e máxima podem não corresponder ao que fornece seu transmissor. Portanto, você precisa "treinar" cada ESC com os valores necessários. Certifique-se de que as hélices não estejam montadas em motores. Consulte o manual do usuário do seu controlador de vôo. Após a reprogramação, o ESC retém sua configuração atual mesmo quando não está energizado. Portanto, cada ESC é programado apenas uma vez, durante o teste / configuração inicial.
Normalmente, há uma seção no manual do controlador de vôo que explica como calibrar o ESC e explica como fazê-lo. Caso contrário, você pode tentar um dos métodos sugeridos abaixo. Mais uma vez, se você ainda não removeu suas hélices, é hora de fazer isso.
Transmissor
- Conecte um ESC ao pino “Throttle” do receptor. Se o seu ESC não tiver um BEC conectado, você pode conectar um ESC habilitado para BEC a outro pino no receptor (como a entrada da bateria) simplesmente para fornecer energia ao receptor.
- Conecte o ESC ao motor apropriado (se ainda não estiver conectado).
- Ajuste o stick / joystick associado a “Throttle” para o máximo (geralmente o stick / joystick esquerdo e avanço / avanço total) e, em seguida, ligue o transmissor.
- Conecte a bateria LiPo ao quadro de distribuição de energia ou diretamente a este ESC (se os conectores forem compatíveis).
- O motor deve apitar três vezes (11,1V LiPo) seguido por uma pequena pausa seguida por dois bipes curtos (que é o bipe máximo).
- Imediatamente após bipes curtos, mova o stick / joystick do acelerador para a posição mais baixa (que é o bipe mínimo).
- O motor deve apitar três vezes (11,1 V LiPo) seguido por um bipe longo.
- A faixa de aceleração para este ESC está agora definida, vá para o próximo até que todos os ESCs tenham sido calibrados.
Outros métodos
Siga as instruções no manual do usuário do produto para combinar a faixa mínima / máxima do sinal de entrada ESC com o que ele receberá do transmissor.
- USB: Alguns modelos ESC são programáveis via USB, independentemente ou com um adaptador.
- Placa de programação: Placa de programação ESC externa, pode ser usada com quase qualquer ESC e é um dispositivo autônomo.
- Microcontrolador: Este método não é amplamente utilizado, mas certamente é possível reprogramar o ESC com um microcontrolador se você tiver o código correto e puder se conectar corretamente.
- Controlador de vôo: Alguns controladores de vôo permitem que você calibre ou programe ESCs através de sua interface de programação. Leia as instruções do seu controlador de vôo para ver se isso é possível.
Motor e rotor principal (hélice). Direção.
Agora você está pronto para instalar as hélices. Vamos voltar para 3 lição, que discute a direção do rotor principal para criar o empuxo. Todas as hélices têm uma direção de rotação superior e inferior, e CW (sentido horário) e CCW (sentido anti-horário). Geralmente, há um texto no topo de uma estaca indicando sua altura e diâmetro. Quando a hélice é montada no eixo do motor, esta parte superior aponta para o céu, independentemente de o motor estar montado na parte superior do feixe do drone ou na parte inferior do drone.

Lista de verificação de pré-voo do piloto
Embora o drone não seja tão complexo ou perigoso quanto uma aeronave comercial real, você - como um piloto e deve ter uma lista de verificação pré-voo para se certificar de que o próximo voo não colocará pessoas ou propriedades em perigo. A lista abaixo cobre apenas o essencial e deve ser realizada antes de cada voo (não apenas antes do primeiro).
- Certifique-se de ter qualquer um dos recursos visuais disponíveis para dizer qual lado do seu drone está na frente. No mínimo, adicione fita colorida às duas vigas frontais.
- Certifique-se de que a bateria do equipamento de controle esteja carregada.
- Agite levemente o UAV - nada deve se soltar, chacoalhar ou cair no chão. Você nunca saberá o que pode ter sido deslocado ou quebrado como resultado de um pouso forçado em um vôo anterior.
- Certifique-se de que as hélices ainda estão fixadas com segurança.
- Primeiro ligue o equipamento de controle, depois ligue o drone (mantenha as mãos longe dos rotores).
- Certifique-se de que pode armar e rearmar os motores de forma confiável (eles devem girar em baixa RPM quando "Armar" e parar de girar quando "Desarmar")
- Certifique-se de calibrar ou os sensores estão bons calibrado (você deve fazer isso regularmente)
- Verifique a faixa do transmissor.
- Certifique-se de que a área de vôo esteja completamente limpa e, se houver alguém dentro dela, informe-os, especialmente crianças curiosas; que você está pilotando o UAV e que não deve se aproximar até que o drone tenha pousado com os motores completamente parados.

Testes
Até que você ganhe confiança suficiente em suas habilidades como piloto e projetista de drones, o seguinte procedimento é sugerido para todos os veículos aéreos não tripulados antes de seu primeiro vôo.
- Ligue os motores e certifique-se de que eles giram nas direções corretas, conforme descrito no manual do controlador de vôo.
- Levante o stick / joystick do acelerador muito lentamente e certifique-se de que as hélices estão empurrando o ar em direção ao solo. Usar papel de seda é uma opção segura para inspeção visual.
- Mova o stick / joystick com muito cuidado para frente / para trás para ter certeza de que o drone se inclina para frente / para trás corretamente.
- Com muito cuidado, mova o stick / joystick de Roll para cada lado para garantir que o drone responda corretamente.
Se o drone não estiver se comportando adequadamente, há muitos motivos possíveis, entre os quais os mais comuns são:
- Um ou mais motores estão girando na direção errada.
- O controlador de vôo não foi instalado corretamente e o que ele considera "avançado" é diferente de seu UAV físico.
- Um ou mais contatos entre o receptor e o controlador de vôo não estão conectados corretamente ou mesmo no lugar errado.
- Talvez tudo esteja configurado corretamente, apenas muito rápido ou muito abruptamente para responder à entrada do usuário.
Plano de Emergência
apenas começando a trabalhar no campo e / ou com um novo drone. A lista abaixo tem o objetivo de dar a você coisas em que pensar e algumas idéias sobre como e por que responder aos aspirantes a piloto. A decisão é tomada caso a caso e, em algumas situações, pode contradizer o que aqui se propõe. Portanto, conheça a si mesmo, conheça o ambiente ao seu redor e tenha cuidado! Em quase todos os casos, será melhor perder o drone do que correr o risco de colidir com pessoas ou propriedades.
O drone está muito longe e você não sabe em que direção ele está.
- Reduza o acelerador e observe se o drone responde (verifica se há conexão).
- Se o drone responder ao gás, tente pousar ali (se puder).
- Se este local não for adequado para pousar, tente apontar cuidadosamente o drone para frente (nada drástico), e se o drone reagir confiando em sua posição, mover-se para a esquerda ou direita no céu permitirá que você determine sua orientação. Se não parece estar se movendo para a esquerda ou direita, pode estar se movendo em sua direção ou longe de você, então desfaça o que você acabou de fazer e tente limpar para a esquerda.
O drone repentinamente desvia bruscamente do curso (com ou sem razão).
- Se você não é proficiente em pilotagem (para tentar restaurá-lo), desligue o acelerador completamente e deixe-o cair: neste caso, contemplar uma ação radical pode levar ao fato de você perder a visão do drone ou, pior ainda, o drone começará a subir para cair de uma distância maior.
O drone está se movendo rapidamente em direção às pessoas.
- Gás ao máximo para que ganhe altitude e voe sobre eles; seu drone provavelmente ainda estará na orientação geral correta, então é melhor perder o drone do que voar em direção às pessoas.
- Depois de atingir a altitude ideal, tente recuperar o controle e, em seguida, posicione-o de forma que fique acima da área livre de pouso.
O drone está se movendo rapidamente em sua direção.
- Gás para zero; deixe-o bater no chão, do que voar em sua cabeça.
O drone não responde à entrada do equipamento de controle.
- Nesse caso, não há nada que você possa fazer. Se o drone ainda estiver no ar, as baterias do controle remoto podem estar esgotadas.
O drone perde a hélice.
- A perda de uma hélice afeta tanto o empuxo quanto a guinada; tente endireitar a guinada primeiro (você provavelmente precisa segurar o manche / joystick conectado à guinada, na posição extrema) e, ao mesmo tempo, mova cuidadosamente o manche / manete do acelerador para evitar uma colisão e, em seguida, abaixe o acelerador.
Primeiro vôo
Independentemente de sua experiência de vôo anterior, seu primeiro vôo, especialmente com um UAV multi-motor personalizado, deve ser o mais discreto possível. O objetivo do primeiro vôo é certificar-se de que tudo está configurado corretamente; bem como identificar quaisquer problemas graves.
- Localização: área aberta, longe de prédios, pessoas e propriedades. Por exemplo: um campo de futebol vazio, campo de beisebol e assim por diante seria o ideal. Não deveria haver vento algum.
- Vá até a lista de verificação de pré-vôo do piloto.
- Fique a cerca de 2 metros de distância do drone com a frente do drone voltada para longe de você.
- Arme os motores.
- Mova suavemente o manche / joystick do acelerador para cima. Chegue ao ponto em que o drone está pronto para decolar. Alguns efeitos no solo podem fazer com que o drone salte ligeiramente, mas não se preocupe.
- Adicione aceleração para tirar o drone do solo e se acostumar com os controles - tente mantê-lo dentro de um determinado raio e veja como ele reage aos movimentos do manche / joystick.
- Faça movimentos pequenos, graduais e fluidos - nada muito repentino. Abaixe o stick do acelerador para evitar um acidente.
- Se o seu drone não se comportar como esperado (por exemplo, mover o eixo "Pitch" leva ao seu tom, bem como rolar para a esquerda ou direita), algo está errado e você terá que descobrir o causas dos problemas identificados...
- Se o drone se comportar como esperado, sua tarefa é manter firmemente sua posição a uma altura de 1,2-2 metros do solo. Não fique muito bravo tão rápido.


.Voos adicionais
Agora que você resolveu os glitches e voou confortavelmente em um ambiente controlado, você pode prosseguir com o segundo vôo.
- Uma vez que o drone ainda não foi totalmente testado, sugerimos passar por todo o procedimento pré-voo para o primeiro voo, que não deve demorar muito.
- Usando movimentos suaves, acostume-se a como o drone reage aos movimentos do stick / stick mantendo-o a uma distância segura.
- A adaptação para pilotar um drone deve ser feita sem a ajuda de FPV e vários sensores.







