Kaj je kvadrokopter?
Kvadrokopter je neke vrste večkopter. Večkopter je večmotorno ali večrotorno letalo (helikopter), katerega glavni rotor se vrti diagonalno v nasprotnih smereh. Večkopterji se razlikujejo po številu motorjev (ali po številu rotorjev). Danes se uporabljajo multikopterji s tremi ali več rotorji.
Najpogostejše sheme so: 4/6/8 rotorji. Aparatura s tremi rotorskimi propelerji se imenuje trikopter; s štirimi - štirikopter; s šestimi - heksakopter in z osmimi rotorji - osmokopter. Uporaba vsake od shem v bistvu določa tak parameter, kot je - masa nosilnosti ali, enostavneje, teža, ki jo lahko večkopter prevzame na krovu.
Primeri sodobnih rešitev z več rotorji.
Sodobne rešitve z več rotorji iz različnih cenovnih niš:




Iz zgodovine
Vse se je začelo leta 1922 z rusko-ameriškim letalskim konstruktorjem Georgijem Aleksandrovičem Botezatom. Kdo je izumil prvi tovrstni delovni štirikopter. Njegov aparat ni mogel le vstati s tal, ampak je tudi nekaj časa zdržal v zraku. Takrat so imele take naprave eno pomembno pomanjkljivost - načelo delovanja.

Od štirih rotorjev je bil le eden vodilni (vrtenje je nastavil motor z notranjim zgorevanjem), tj. navor prek kompleksnega prenosa je en motor prenašal na drugi 3 glavni rotor. Do serijskega razvoja ni prišlo. In izumi, kot sta "Tail rotor" in "Swashplate", so prisilili, da so popolnoma opustili razvoj letal z več rotorji, kasneje je bil ustvarjen prvi helikopter na svetu.
S prihodom 21. stoletja so večkopterji prišli v naše življenje kot brezpilotna letala ali brezpilotna letala.
Glavni sestavni deli večkopterjev
Tehnično so se pred približno petimi leti pojavile tri glavne komponente večnamenskih letal (brezpilotnih letal):
- Baterija - litijev polimer (LiPo), redkeje litij-ionski (Li-Ion).
- Brezkrtačni ali brušeni motorji iz redke zemlje.
- Daljinski upravljalnik (nadzorna plošča / strojna oprema / oddajnik)

Načelo delovanja
Načelo delovanja sodobnega večkopterja je preprosto. Odvisno od sheme uporabe (3/4/6/8-rotor), vsak rotor poganja elektromotor (elektromotor). Ena polovica motorjev vrti vijake v smeri urinega kazalca, druga pa v nasprotni smeri. Zahvaljujoč temu pristopu za krmiljenje večkopterja ni potrebna uporaba repnega rotorja in zapletene krmilne plošče v dronu.
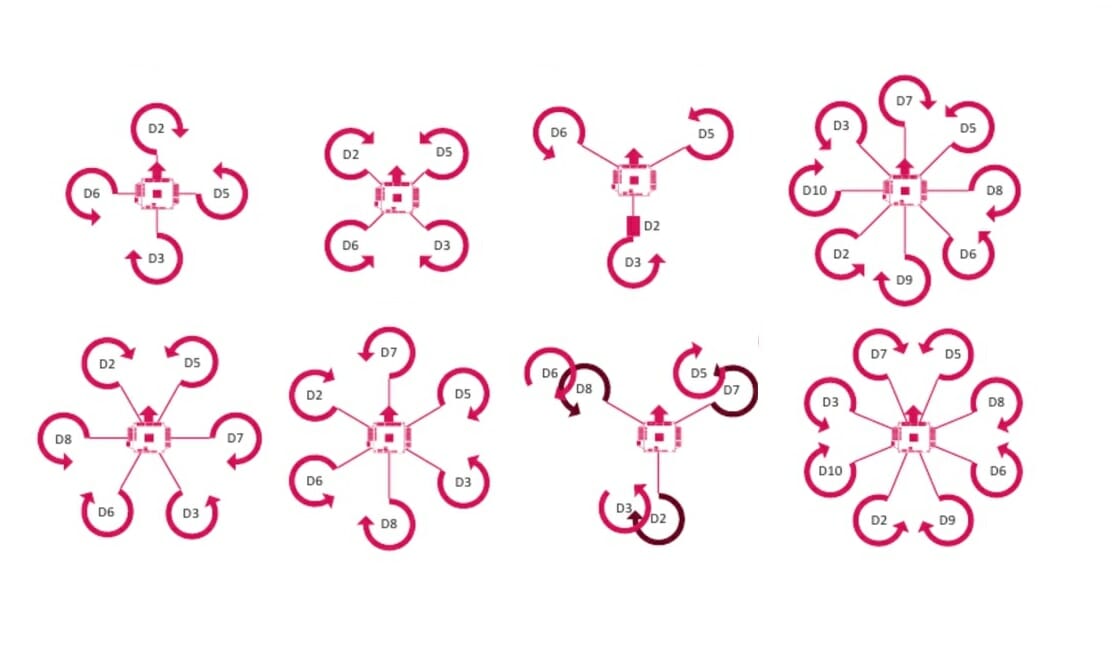
* Vrstni red smeri vrtenja rotorja večkopterjev.
Primer nadzora leta:
- Povečanje vrtljajev na vseh rotorjih - dviganje.
- Zmanjšanje hitrosti na vseh rotorjih - zmanjšanje.
- Če povečate število vrtljajev ene polovice vijakov in zmanjšate število vrtljajev druge polovice, se premik nastavi na stran.
- Povečanje vrtljajev za propelerje v smeri urinega kazalca in zmanjšanje vrtljajev za propelerje v nasprotni smeri urinega kazalca bo zavrtelo drone.
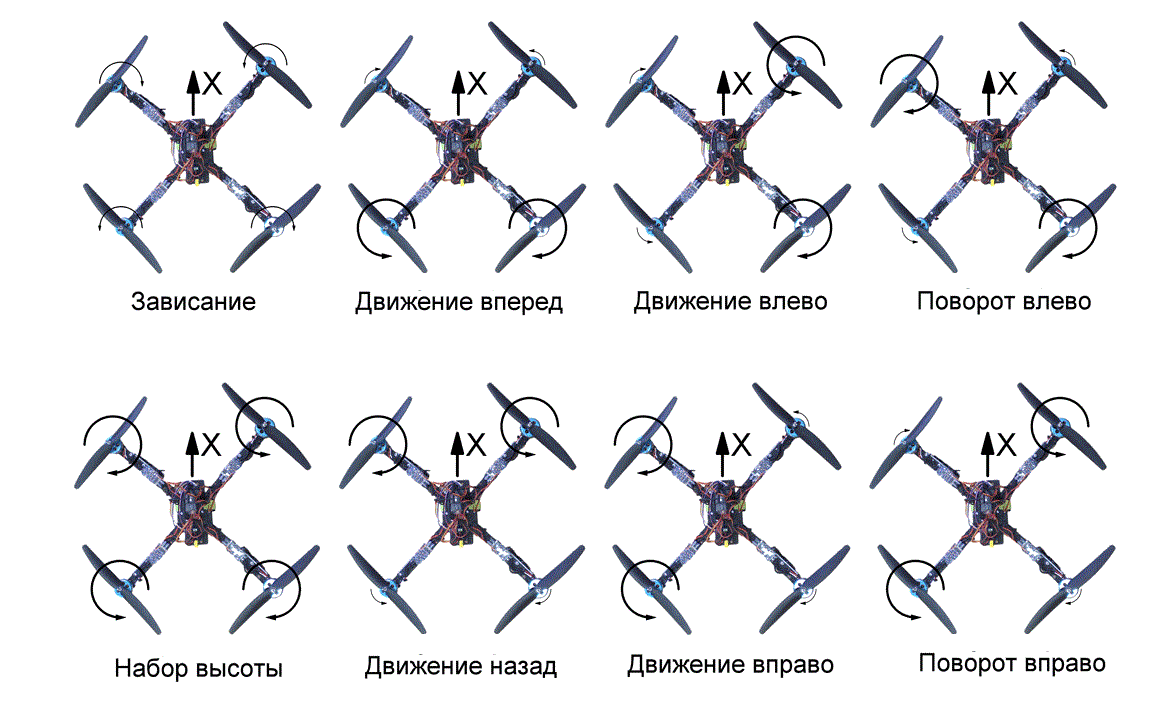
* Shema nadzora leta za vrtenje rotorjev.
Motorji
Na sodobnih večkopterjih (brezpilotnih letalih) se trenutno uporabljata dve vrsti elektromotorjev - krtačeni in brezkrtačni. Brezkrtačni brezpilotni letali so v glavnem opremljeni z dragimi in profesionalnimi brezpilotnimi letali. Z zbiralnimi motorji so opremljene samo proračunske možnosti in igrače. Več podrobnosti o njihovih razlikah najdete tukaj

Upravljanje
Večkopter upravlja daljinski upravljalnik (daljinski upravljalnik, oprema, oddajnik ) prek odhodnih radijskih valov (običajno pri frekvencah 2,4 GHz ali 5,8 GHz ).
Da bi lahko večkopter odgovoril na zahteve nadzorne plošče, je dron opremljen s celim kompleksom elektronskih sistemov:
- Mikroprocesor ( krmilnik leta
- Žiroskop - odgovoren je za stabilno vedenje brezpilotnega letala med letom (praviloma zagotavlja stabilizacijo vzdolž 6 smernih osi).
- Merilnik pospeška - Ta senzor omogoča procesorju, da letalo postavi v vodoravni položaj glede na tla.
- Barometrični senzor (barometer) - zagotavlja brezpilotnemu letalu stabilno lebdenje na izbrani pilotski nadmorski višini.
- Sonar (ultrazvočni senzor) - omogoča samodejno pristajanje in ohranja majhno višino (1,5 - 3,5 metra), lahko pa se uporablja tudi za letenje okoli ovir.
- GPS -modul - zagotavlja geografsko pozicioniranje brezpilotnega letala z uporabo podatkov, prejetih iz satelitskih sistemov. Zaradi svoje prisotnosti se uresničuje funkcija letenja po točkah, vračanje na vzletno mesto v primeru izgube komunikacije ali nizke napolnjenosti baterije, prav tako pa vam omogoča odčitavanje letov, tako v času leta kot po njem.
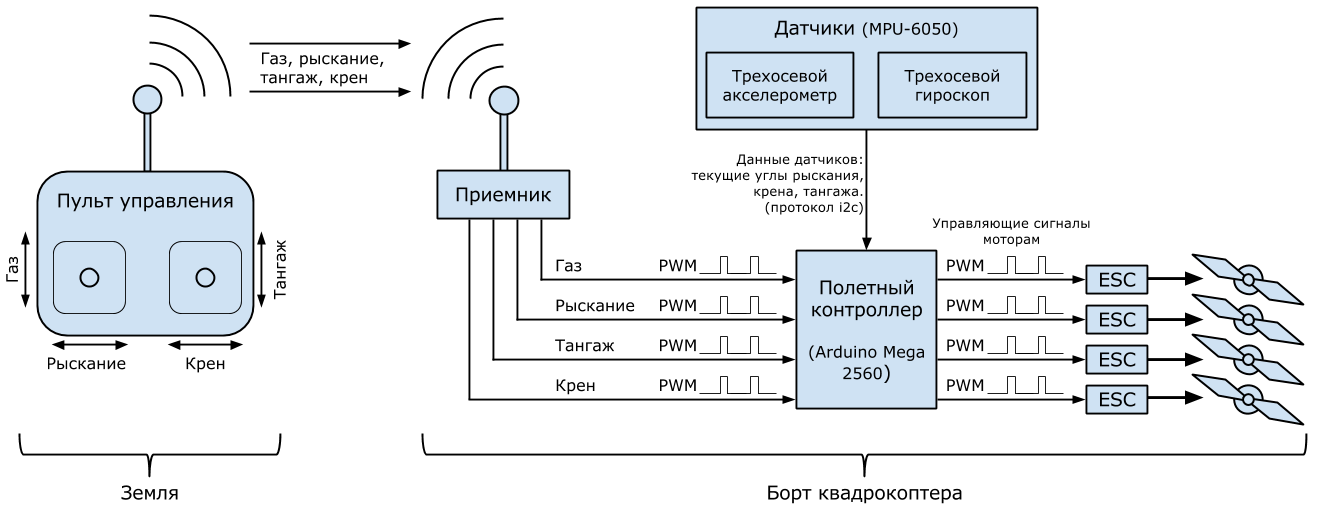
* Najenostavnejša shema naprave za štirikontropter.
Kaj so?
Trenutno trg potrošniških brezpilotnih letal ponuja ogromno večkopterjev (dronov), na splošno pa jih lahko razdelimo v tri velike skupine: Za Začetnike / Amatersko / Strokovno
Za začetnike - primerno tako za otroke kot za odrasle za namen prvega spoznavanja in učenja. Praviloma so opremljeni z mikroprocesorjem, 6-osnim žiroskopom in preprostim barometričnim senzorjem za zagotavljanje zadrževanja nadmorske višine.
Amaterski - za pilote, ki že imajo izkušnje z brezpilotnimi letali. Primernejša za določeno uporabo. Na primer za fotografiranje iz zraka ali za šport, kot je dirkanje z droni. Droni v tej skupini imajo lahko avtonomne funkcije letenja in raziskovanja.
Profesionalno - Primerno izključno za izkušene pilote, ki uporabljajo zmogljivosti večkopterjev (brezpilotnih letal) na poklicnem področju. Na primer profesionalno fotografiranje in video snemanje, geodezija, spremljanje zemlje, prometa, pri reševalnih akcijah itd. V večini primerov imajo brezpilotni letali avtonomne funkcije letenja in raziskovanja. Elektronsko polnjenje je sestavljeno iz visoko natančnih sodobnih sistemov, ki omogočajo odstranitev na dolge razdalje, napajalnik pa vam omogoča, da preživite veliko več časa med letom. Značilna razlika med takšnimi multikopterji je njihova cena.
Za popolnejše poznavanje sistemov brez posadke priporočamo temo "Kaj je brezpilotni letnik?"
.






