Innehåll
- DIY -drönare: Lektion 1. Terminologi.
- Gör-det-själv drönare: Lektion 2. Ramar.
- Gör-det-själv drönare: Lektion 3. Kraftverk.
- Gör-det-själv-drönare: Lektion 4. Flygkontroller.
- Gör-det-själv-drönare: Lektion 5. Montering.
- Gör-det-själv-drönare: Lektion 6. Prestandakontroll.
- Gör-det-själv-drönare: Lektion 7. FPV och distans.
- Drone med egna händer: Lektion 8. Flygplan.
Inledning
Nu när du har valt alla huvudkomponenter för din UAV kan du börja montera. Den här guiden kommer att täcka vanliga misstag vid montering av en multi-rotor UAV, tillsammans med några användbara tips för inställning. Den här lektionen kommer inte att omfatta saker som en kamera / FPV -system, enheter med lång räckvidd eller andra tillbehör (vi kommer att täcka det under 7 lektioner).
Komponenter du måste ha i detta skede:
- Ram (köpt eller handgjord)
- Motorer, ESC, propellrar, batteri, laddare
- Strömfördelningskort / sele
- Flygkontroller och kommunikationsenhet (radiostyrning föreslagen)

Framdrivning
För att uppnå målen för den här lektionen kommer din UAV: s framdrivningssystem att innehålla följande komponenter:
- Motorer
- ESC
- Kraftfördelning (kort eller sele)
- Batteri
- Flight Controller
Observera att propellrar inte är listade. Installera inte propellrar i detta skede! Huvudskruvarna kommer endast att anslutas under den sjätte lektionen. Eftersom detta är din första drönare rekommenderar vi att du gör en "ramlös" elektrisk anslutning innan du installerar allt på ramen; för att kontrollera alla anslutningar och eliminera de identifierade felen.
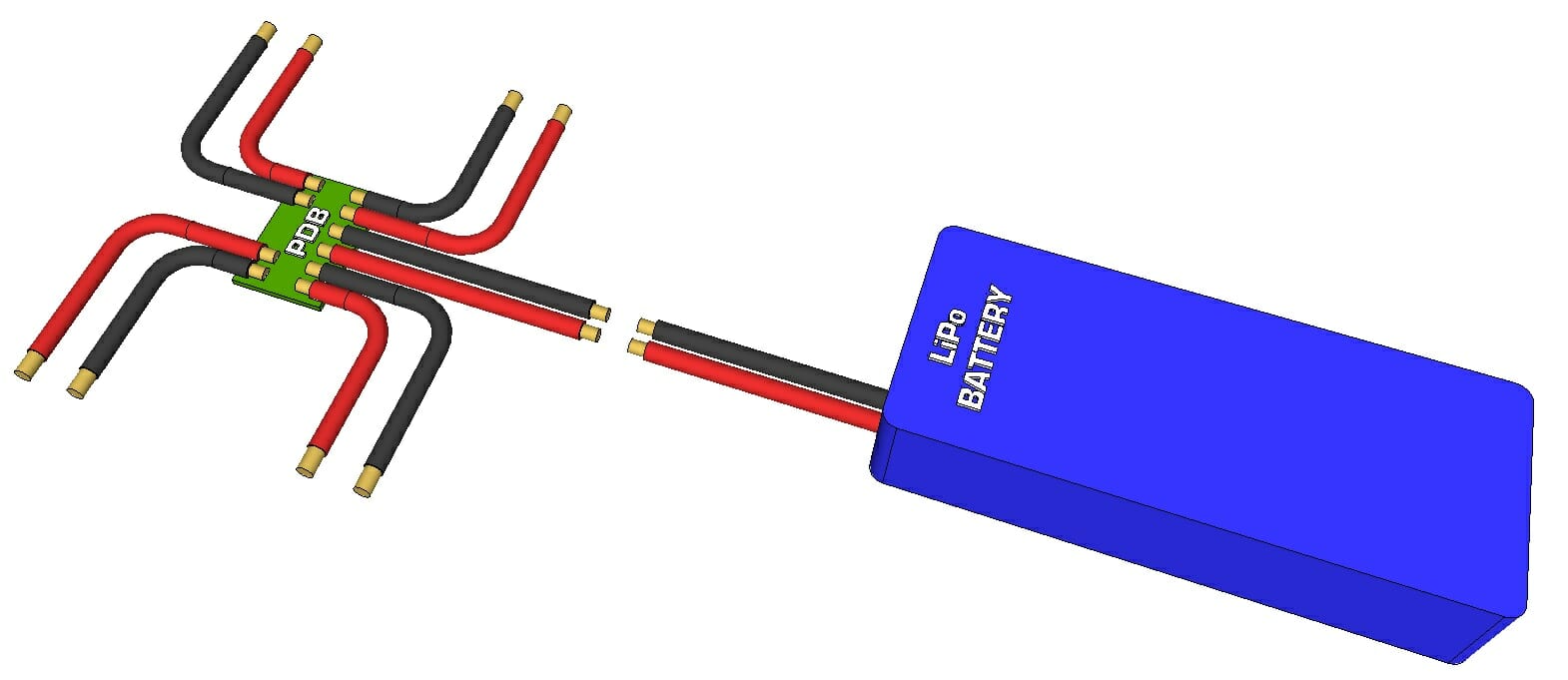
Batteri. Strömfördelning
Anslutningen mellan batteriet och kraftdistributionssystemet bör vara relativt enkel om de båda har samma kontakttyp. Fortsätt i så fall till nästa steg. Om kontakterna är annorlunda, skär aldrig i något fall batterikablarna för att separera kontakten; detta kan orsaka kortslutning och obehagliga elektriska stötar! Istället kan du plocka upp en adapter och använda den mellan kontakten på batteriet och kontakten på strömfördelningskortet. Ett annat alternativ kan vara att söka efter en kopplingskontakt till batterikontakten och köpa den; klipp sedan den befintliga kontakten från strömfördelaren och löd den köpta ersättaren, se först till att det inte finns någon koppling mellan de positiva och negativa stiften.
Det är viktigt att notera att de flesta multi-rotor UAV inte har en på / av-omkopplare, så strömförsörjning och frånkoppling sker genom att ansluta och koppla bort huvudbatteriet från strömfördelarens kontakt, så deras kontakter måste vara säkert fastsatt och trådarna / lödpunkterna är bra isolerade med värmekrympslang och / eller eltejp.
Koppla bort batteriet från strömfördelaren innan du fortsätter.
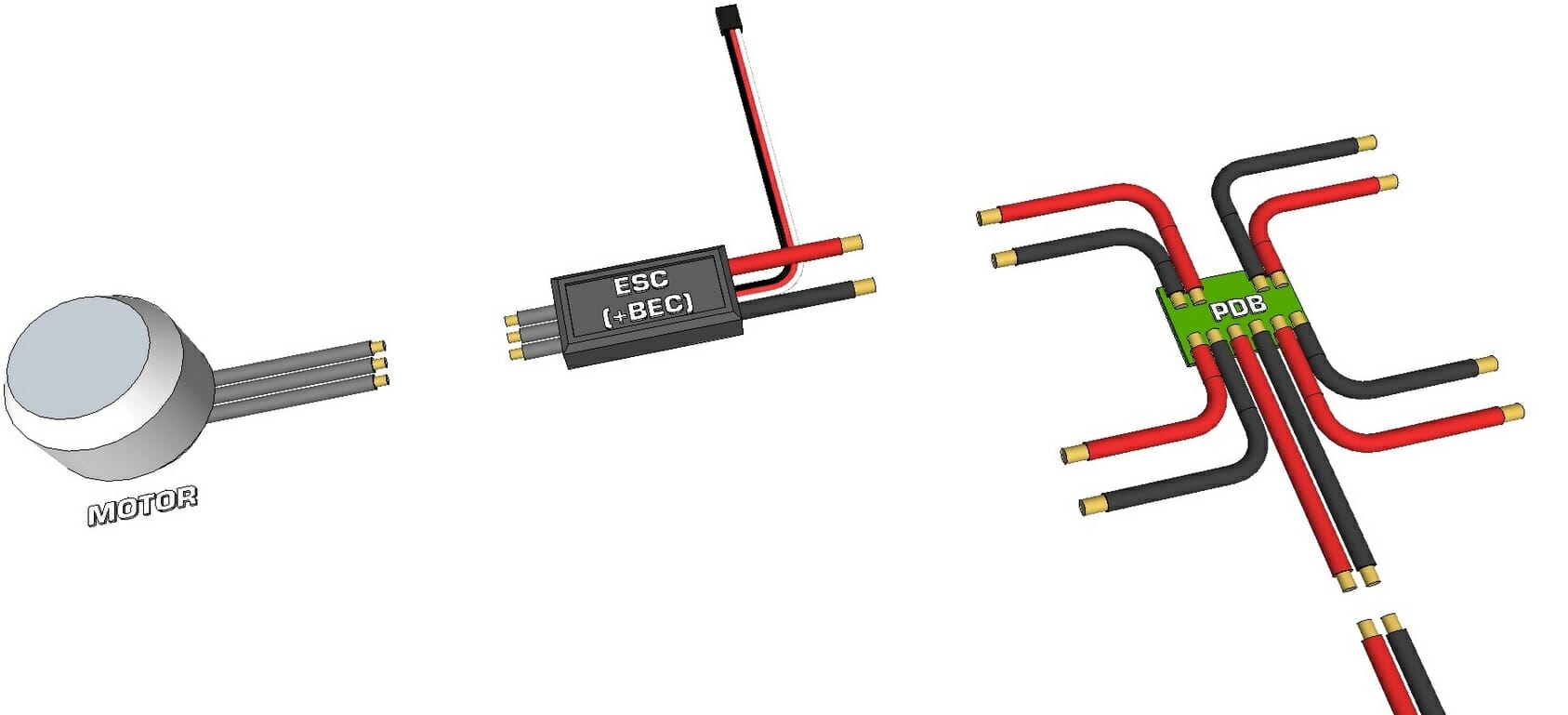
Motor. ESC. Strömfördelning
Strömfördelningskortet (PDP) eller den trådbundna distributionen tjänar främst till att distribuera ström från huvudbatteriet till varje ESC. Spänningen matas till ESC "som den är", så det finns ingen anledning att öka (öka) eller minska (minska) spänningen. Om din drönare har fyra motorer bör du ha fyra ESC: er och därför bör din distributionskort / trådfördelning så småningom dela upp huvudbatteriet i fyra anslutningar. Om din PRP har sex anslutningar och du bygger en quadrocopter behöver du helt enkelt inte ansluta de två sista. Om du bygger en hexakopter bör din PDP fördela ström från huvudbatteriet till sex anslutningar. ESC innehåller följande ledningar:
- Ett 3-trådigt 0,1-tums band med R / C-kontakt, varav den svarta stiftet vanligtvis är slipat, den röda ger 5V-utgång (via BEC*) och gul / vit är signalinmatningen.
- Tre separata trådar ansluts till de tre ledningarna på en borstlös likströmsmotor (vanligtvis levereras med honkontakter som antingen redan är lödda eller inkluderade).
- Två ingångskontakter för anslutning av batteriet till PDB (vissa inkluderar lödade kontakter med lödning, vissa ingår och ibland inte alls).
*ESC har vanligtvis en inbyggd Battery Eliminate Circuit (eller BEC) som omvandlar huvudbatterispänningen till 5V för att driva mottagaren och flygkontrollen. 5V levereras vanligtvis via RC -kontakten från ESC (vanligtvis mitt / röda stift). Du behöver bara en BEC för att driva flygkontrollen.
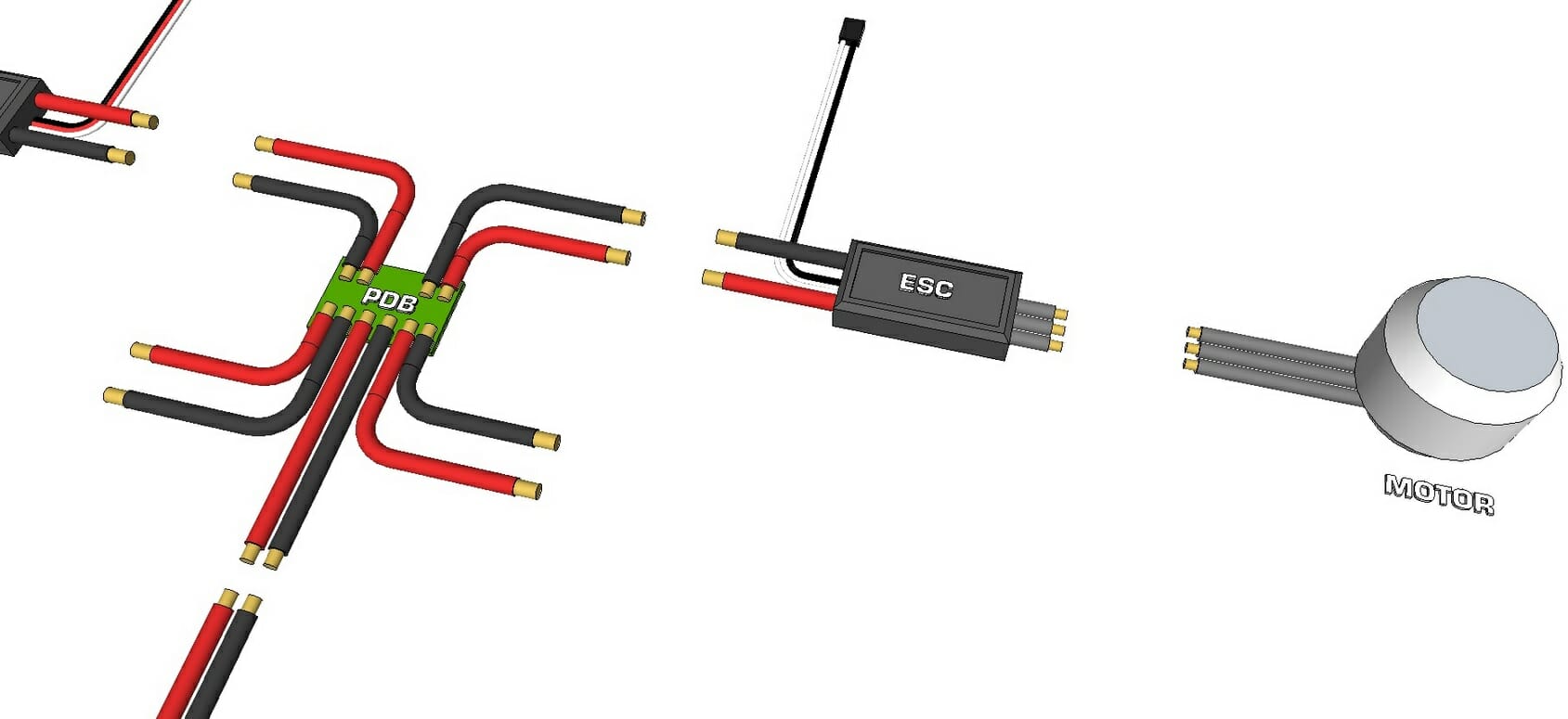
Om strömfördelningskortet använder kontakter som inte matchar kontakterna på ESC eller batteriet måste du antingen köpa adaptrar (adaptrar) eller köpa nya kontakter och byt ut dem på ESC eller PRP. Fördelen kvarstår med kraftfördelningskortet, vars kontakter matchar batteriets och ESC: s. Oftast kan ett litiumpolymerbatteri i en UAV ha DEANS-kontaktXT60EC3
Om du vill driva ytterligare lågströmselektronik (LED-belysning, hängande, etc.) men det inte finns några extra anslutningar på din strömfördelningskort kan du använda batteriladdningskabeln. Den vita laddningskontakten har vanligtvis en stift för jord och en stift för varje cell (1S, 2S, 3S, etc.) som används i LiPo -batteriet. Även om den här kontakten verkligen bara är för laddning av batteriet, kan den ge en 3,7V utspänning från varje stift och kan användas för att driva lågströmselektronik, t.ex. en sele eller lysdioder.
- Ta bort den röda ledningen från varje 3-polig R / C-kontakt på farthållaren utom en. Det rekommenderas att du gör detta på ett sådant sätt att du alltid kan ansluta dem om det behövs. Vik änden av varje uteslutet tråd med eltejp eller använd krympslang för isolering så att de senare inte kan komma i kontakt med andra elektroniska element. Den enda röda tråden som lämnas orörd kommer att driva flygkontrollen som används i enheten.
- Anslut de två matningskablarna för varje ESC till fördelningskortet, se till att den röda tråden går till positiv () och den svarta ledningen till minus (-).
- Om strömfördelningskortet du använder har sina egna R / C -kontakter, är det i detta fall upp till dig att ansluta R / C -stiften på varje ESC till R / C -kontakterna på detta kort eller anslut dem direkt till flygkontrollen.
- Anslut var och en av de tre motoranslutningarna till de tre ESC -kontakterna. För närvarande är ordningen för att ansluta dessa kontakter inte viktig (om det påverkar rotationsriktningen kommer det att korrigeras vid behov senare).
Observera att om du bestämmer dig för att ta bort eller dölja ledningarna i detta skede kan du senare behöva komma åt några av anslutningarna i enlighet med proceduren som beskrivs i lektion 6, särskilt byta anslutningar mellan ESC och en motor så att motorn roterar i motsatt riktning.

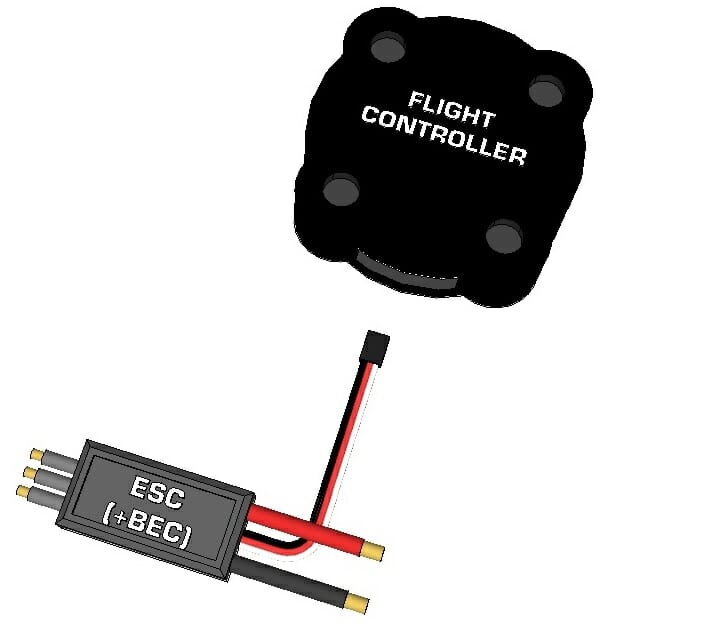
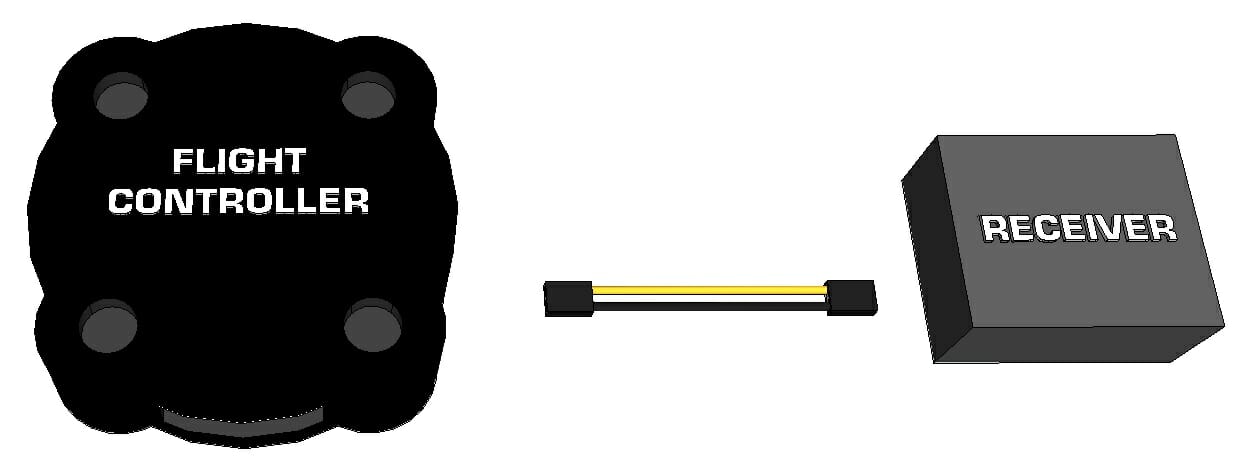
ESC. Flygkontrollant.
Du kan nu ansluta farthållarnas R / C -ingångar till flygkontrollen. Flygkontrollen du väljer ska ha ett diagram som visar vilka styrstift som är anslutna till motorerna i din multirotoraggregat. Detta diagram bör också visa rotationsriktningen för varje motor, men återigen behöver du inte tänka på riktningen för tillfället.
- Se kopplingsschemat mellan motorerna / ESC och flygkontrollen i datorns bruksanvisning.
- Anslut R / C -kontakterna på varje ESC till motsvarande stift på flygkontrollen, se till att jordledningen (vanligtvis svart) ansluter till flygstiftets jordstift och signalstiftet (vit eller gul) ansluter till signalstiftet på flygkontrollen...
- Endast en av RC -kontakterna kommer fortfarande att ha den röda (ström) stiftet.
Kommunikation
Mottagare. Flygkontrollant.
Antag att du i den här lektionen gjorde valet till förmån för radiostyrning som inmatningsenhet. Om du vill använda WiFi, Bluetooth eller annan inmatningsmetod, läs flygkontrollmanualen och sök efter seriell ingång; Detta avsnitt kommer att beskriva hur / var den seriella ingångsenheten ska anslutas till flygkontrollen. Du kommer sannolikt att behöva hitta och ansluta sändningen (Tx), mottagningen (Rx), spänningen (5V) och GND -stiften från den trådlösa enheten till sändaren, så att Rx från den ena till den andra Tx, och vice versa.
Din RC -sändare måste levereras med en lämplig RC -mottagare. Mottagaren måste vara bunden till sändaren så att du kan ta bort bindbygeln från mottagaren (om sådan finns). Satsen kan också innehålla en AA -batterihållare, som är utformad för att driva mottagaren, men vi kommer inte att använda den eftersom BEC kommer att driva både mottagaren och flygkontrollen. För att ta reda på vilka RC -mottagarkanaler som ansluter till vilka stift på flygkontrollen, måste du titta på användarhandboken för både flygkontrollen och RC -systemet.
Handboken för flygkontrollen anger platserna för följande stift som ska matchas och anslutas till mottagaren:
- Gasreglage
- Stigning
- Yaw
- Roll
- Aux Switches 1, 2, 3, etc.
Du kan nu göra följande anslutningar:
- Läs flygkontrollmanualen för att se vilket R / C -ingångsstift som är anslutet med vilken av ovanstående funktioner.
- Läs sändarhandboken för vilken kanal som är kopplad till varje funktion.
- Vissa RC -sändare kan programmeras om för att ändra funktionen för varje kontakt. Om du bestämmer dig för att ändra någon ingång (joystick eller switch), gör det först efter att du har kontrollerat vilken kanal på mottagaren som motsvarar vilken funktion. Gas, Pitch, Yaw och Roll bör alltid associeras med två pinnar / joysticks, inte omkopplare eller knappar.
- Anslut Throttle -kanalen på mottagaren till Throttle -ingången på flygkontrollen.
- Anslut Pitch -kanalen på mottagaren till Pitch -ingången på flygkontrollen.
- Anslut Yaw -kanalen på mottagaren till Yaw -ingången på flygkontrollen.
- Anslut GND på flygkontrollen (vanligtvis den tredje raden med stift) till GND på mottagaren (vanligtvis den tredje raden med stift).
- Om hjälpingången kommer att användas, anslut Aux 1 på mottagaren till Aux 1 på flygkontrollen, och så vidare.
Du kan använda 3-poliga servotrådar för varje kanal, men bara en av kanalerna (kan vara valfri) måste ha spänning och jord; resten behöver bara en signalkabel. Alla anslutningar kan vara GND till GND, även om endast en krävs. Återigen behöver mottagaren inte ett separat batteri eftersom det kommer att drivas av flygkontrollen, som drivs av BEC från en av ESC: erna.
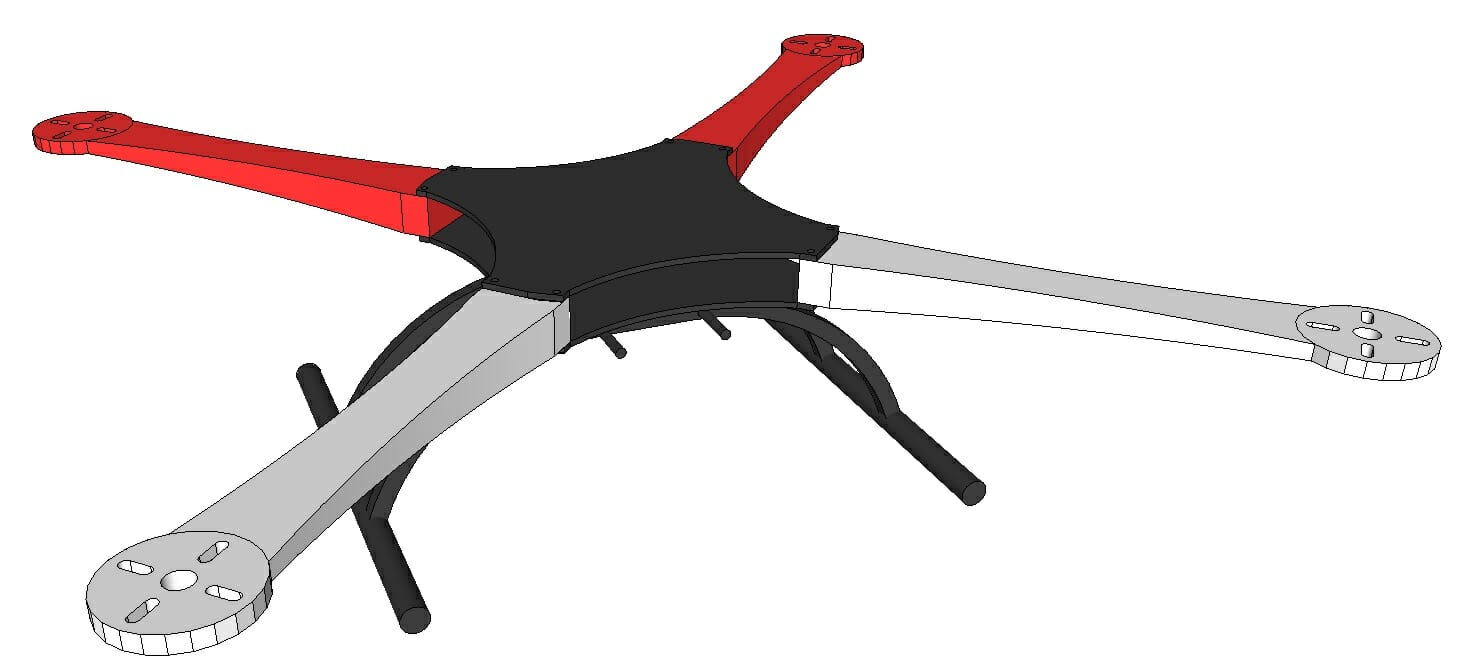
Montering av ramen
Om du bygger din egen ram kan du montera den i detta skede. Följ monteringsanvisningarna om du köpte ett rampaket. Observera att du kan behöva demontera vissa områden för att underlätta anslutning eller ta bort (gömma) elektriska element. Målet är att säkerställa att ingenting är löst, att alla trådar är ordentligt fastsatta och att ingenting kan ramla ur ramen eller trassla ihop sig.
Installation
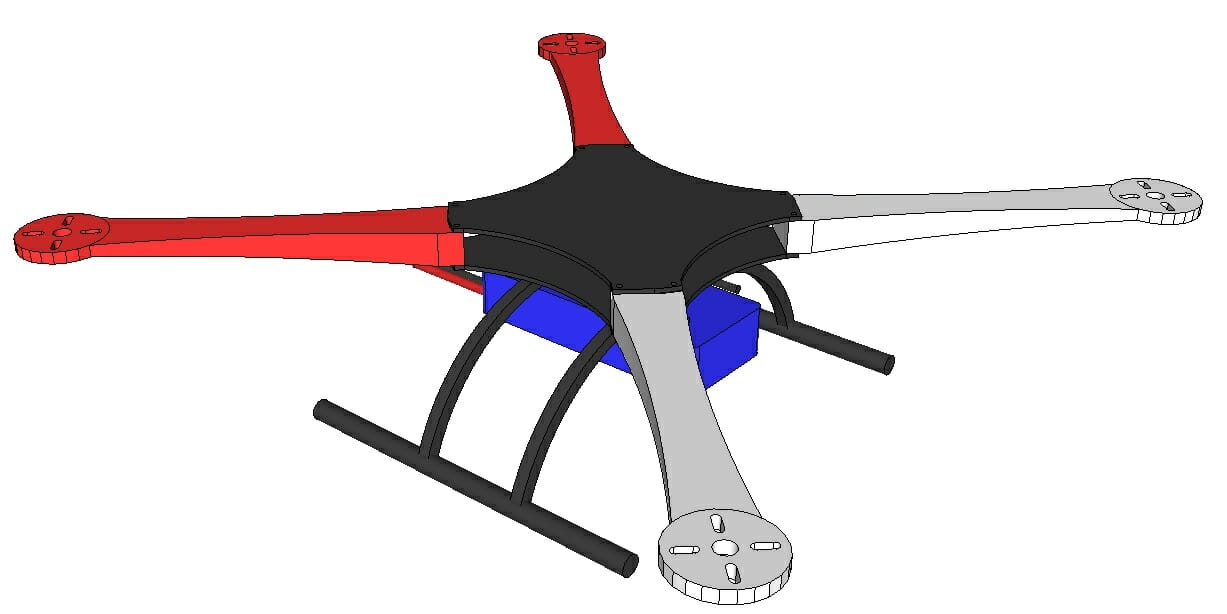
Batteriets placering.
Batteriet som används för kraft är ofta det tyngsta elementet på en UAV och kan sträcka sig från 1/4 till 1/2 av dess totala vikt. Därför är installationsplatsen mycket viktig. Den perfekta platsen för huvudbatteriet bör vara i mitten av flygplanet så att alla motorer kan hantera ungefär samma belastning. Om batteriet ligger närmare baksidan av flygplanet måste de bakre motorerna ge mer dragkraft än de främre motorerna, och därför kommer den maximala totala dragkraften att vara begränsad (när de bakre motorerna har full dragkraft kommer det inte att finnas någon tryck på de främre motorerna). Medan det vanliga tillvägagångssättet i multirotordesign är att hålla flygplanet symmetriskt kring en mittlinje (eller minst en axel), så bör batteriet placeras längs mittlinjen snarare än förskjutas till ena eller andra sidan...
Därefter måste du bestämma på vilken höjd batteriet ska placeras. Det finns flera platser där batteriet kan installeras:
- Under ramen (flygplanet kommer att vara tungt under, mer stabilt och mindre akrobatiskt).
- Direkt under motorerna (vanligtvis inuti ramen); kanske en av de bästa platserna.
- På samma höjd som motorerna eller rotorerna (t.ex. monterade ovanpå ramen).
- Ovanför propellerna (UAV blir tyngre ovanpå och mer benägna att vända).
För bästa prestanda bör batteriet helst placeras i position 3 ovan. Position 4 skapar effekten av en inverterad pendel, och om UAV lutar bortom en viss vinkel tenderar drönaren att vända. Position 1 kommer att skapa en ganska stabil plattform som till sin natur tenderar att hålla sig i nivå, men är extremt olämplig för akrobatik. Därför väljer de flesta designers position 2 och placerar batteriet antingen direkt under ramen eller inuti den. Detta tillvägagångssätt frigör utrymme under ramen för nyttolaster som upphängningssystemet och utrymme ovanför för flygkontrollen och annan elektronik för att vara så tillgänglig som möjligt.
Batterimontering
Det finns många vanliga sätt att fästa batteriet på ramen, inklusive:
- kardborreband
- Självhäftande kardborreband (ena sidan limmad på batteriet och den andra på ramen)
- I ramen
Kardborreband är vanligast för medelstora ”standarder ”Anpassade drönare i storlek Medan ramhölje oftast förekommer på kommersiella drönare, är ramarna för sådana UAV -modeller utformade under tryck och lämnar utrymme inuti specifikt för ett specifikt batteri. Kardborreband bör helst endast användas om batteriet är relativt lätt; istället för en kort sektion i mitten rekommenderas att limma en remsa längs hela batteriets längd. Om du använder kardborreband och upptäcker att batteriet tenderar att dyka ut på grund av bristande grepp, rekommenderas att du lägger till gummilister där batteriet kommer i kontakt med remmarna. Det rekommenderas inte att använda lim för att fästa batteriet på ramen. Om du inte använder en UAV, ta bort batteriet och förvara det i en LiPo säker påse eller keramisk behållare.
Ladda batteriet
Det är mycket troligt att du har valt ett litiumpolymer (LiPo) eller ett annat litiumbatteri. De flesta LiPo-batterier över 3,7 V har en separat laddningskabel med en flerpolig kontakt för laddning, medan strömkabeln kan identifieras genom att det finns en tvåpolig kontakt med större ledningar som klarar höga urladdningsströmmar. En laddningsanslutning har vanligtvis en kontakt för varje batteribank, liksom en gemensam jordkontakt.
På grund av farorna med LiPo -batterier (väte och elektricitet) är det vanligt att helt ta bort batteriet från drönaren när den inte används och placera den i en LiPo Safe -väska. Samma påse används när du laddar batteriet (anslut batteriet till laddaren, placera batteriet i påsen (lämna laddaren utanför påsen) och stäng det (det har vanligtvis en kardborreklaff).
.Placering och montering av flygkontroller
Helst ska flygkontrollen vara placerad i mitten av drönaren på samma höjd som motorerna. Om detta inte är möjligt kan regulatorn placeras något högre eller lägre. riktning till vänster eller höger sida, och undvik att montera den framåt eller bakåt. Om du köpte en ram för en UAV har dessa ofta monteringshål för flygkontrollen, som är på den optimala platsen. kan fixas på något av följande grundläggande sätt:
- Skruvar / muttrar / stolpar (grundläggande)
- Dubbelsidig tejp (se till att den är tillräckligt stark)
- Dubbelsidig skumtejp (för att uppnå dämpningseffekt)
- Gummidämpningsbussningar (för hög dämpning)
Vissa flygkontroller har antingen eller kan ha ett valfritt skyddshölje.
I detta skede bör du ha en färdigmonterad och ansluten UAV, exklusive propellrarna. Lektion 6 inkluderar installation och test av sändaren, flygkontrollprogramvara, kontroll före flygning och första flygning.







