Innehåll
- DIY -drönare: Lektion 1. Terminologi.
- Gör-det-själv-drönare: Lektion 2. Ramar.
- Gör-det-själv-drönare: Lektion 3. Kraftverk.
- Gör-det-själv-drönare: Lektion 4. Flygkontroller.
- Gör-det-själv-drönare: Lektion 5. Montering.
- Gör-det-själv-drönare: Lektion 6. Prestandakontroll.
- Gör-det-själv-drönare: Lektion 7. FPV och distans.
- Drone med egna händer: Lektion 8. Flygplan.
Inledning
Så innan du börjar montera din drönare är det första steget att välja en ram. Du kan utföra det själv, eller använda färdiga lösningar (UAV-ramkit). Som du kanske har märkt kan olika typer av ramar och konfigurationer användas för att skapa multi-rotor UAV: er. Därför kommer vi i detta avsnitt att överväga vanliga eller grundläggande typer av ramar, material för utförande, samt frågor relaterade till design.
Typer av UAV -ramar
Tricopter
- Beskrivning: UAV, som har tre strålar, som var och en är ansluten till en motor. Den främre delen av trikoptern anses vara sidan av korsningen mellan två balkar (Y3). Vinkeln mellan strålarna kan variera, men är vanligtvis 120 °. För att motverka den gyroskopiska effekten av det ojämna antalet rotorer, samt för att ändra styrvinkeln, måste den bakre motorn kunna rotera (uppnås genom att installera en konventionell RC -servomotor). För att utesluta användningen av en servo från enheten, använd Y4 -konstruktionen
- Fördelar: Ovanligt utseende av drönaren. Den uppnår de bästa flygegenskaperna när man flyger i framåtriktning. Pris (kräver färre motorer och ESC för att bygga).
- Nackdelar: Asymmetrisk design. Kräver användning av en servo. Svårighet i utförandet av bakstrålen (eftersom servon måste monteras längs axeln). Alla flygkontrollanter stöder inte denna konfiguration.

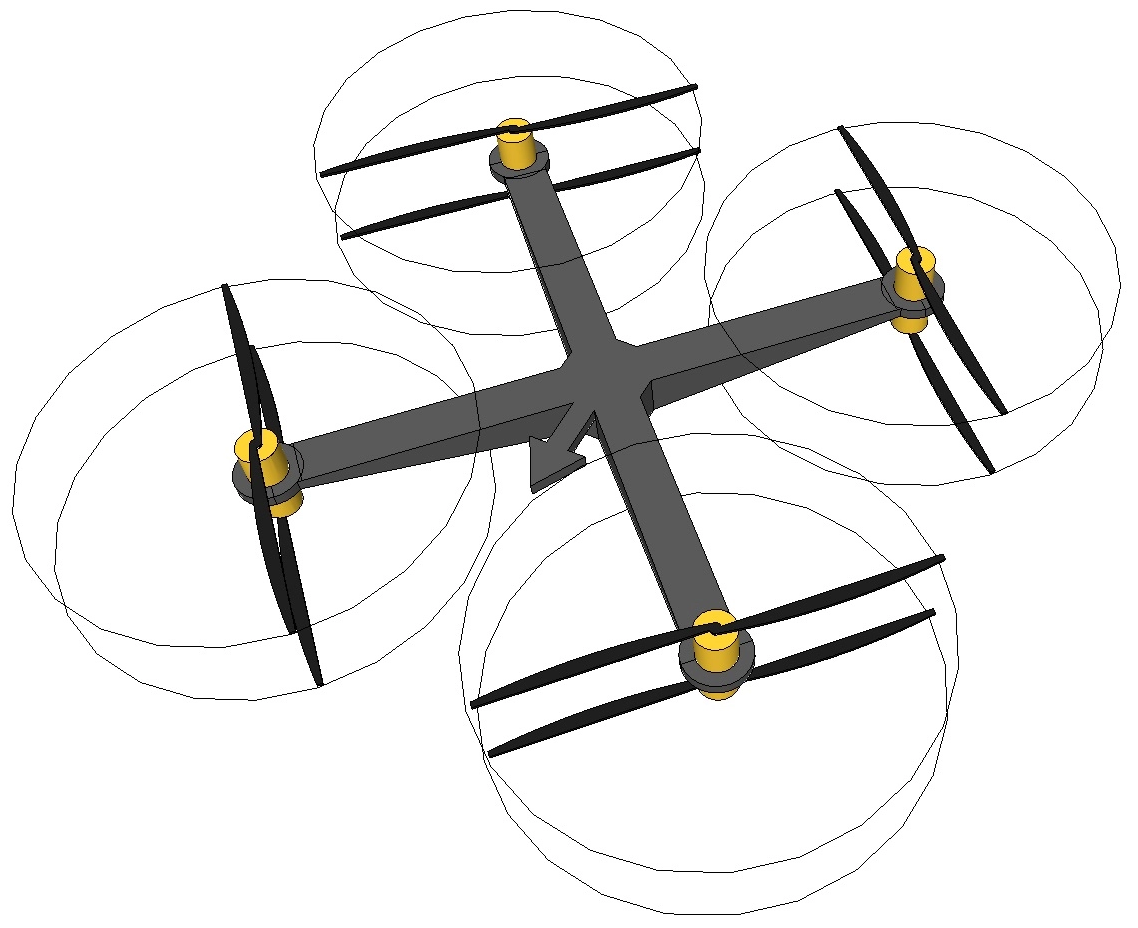
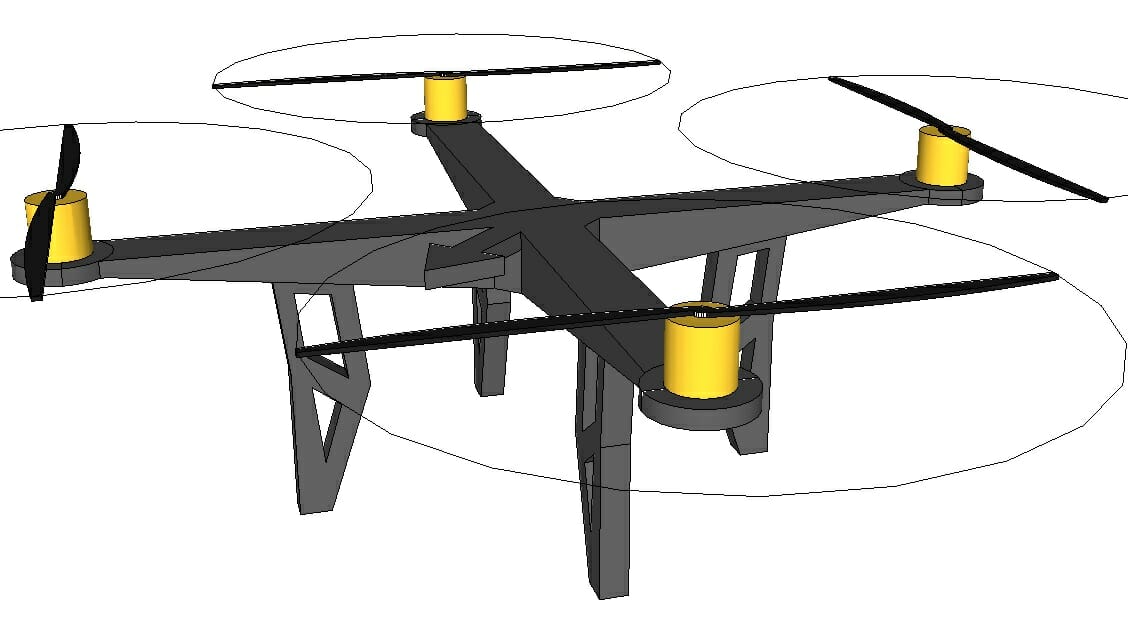
Quadcopter
- Beskrivning:"Quadcopter" drone som har fyra strålar som var och en är ansluten till en motor. För " X -konfigurationkonfiguration
- Fördelar: Mest vanliga konstruktion med flera rotorer. Den enklaste och mest mångsidiga designen. I standardkonfigurationen är armarna / motorerna symmetriska omkring två axlar. Alla flygkontroller som finns på marknaden kan fungera med denna multirotoraggregat.
- Nackdelar: Brist på redundans (om systemet misslyckas, särskilt i elementen i kraftverket, faller drönaren).

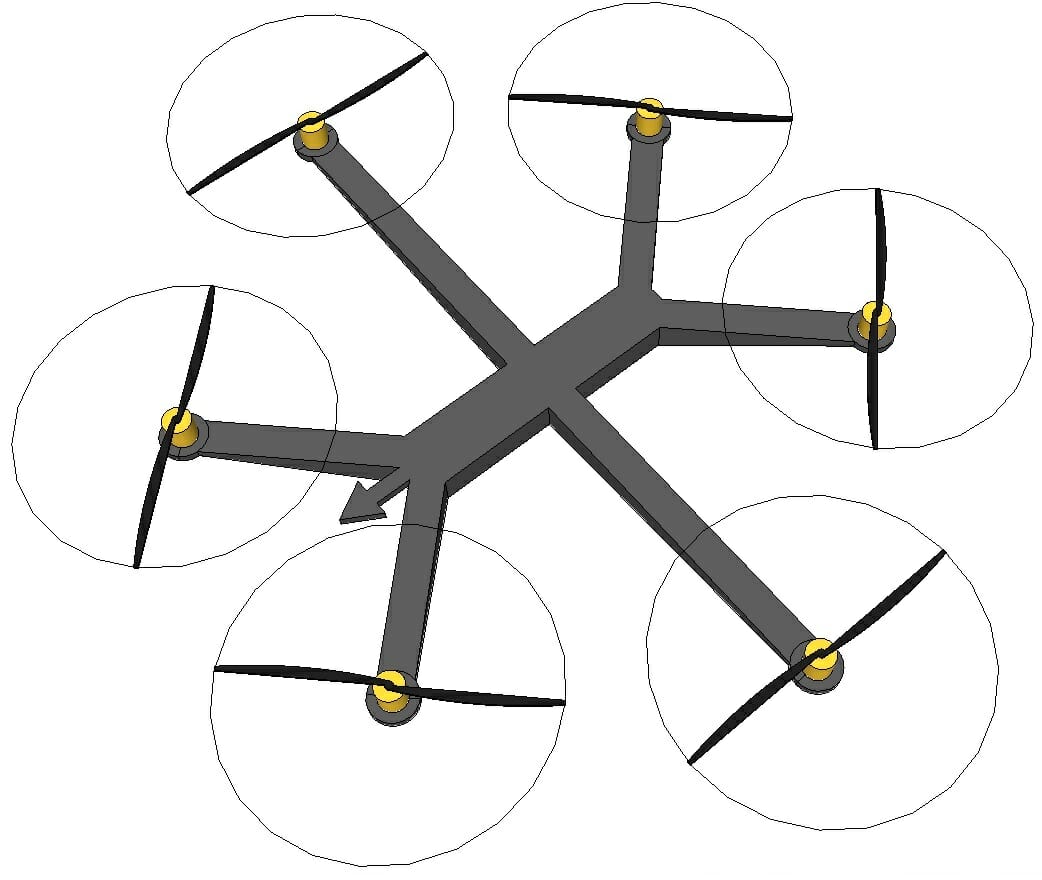
Hexacopter
- Beskrivning: Hexakoptern har sex balkar, var och en av som är ansluten till motorn. Hexakopterns främre del anses vara sidan av korsningen mellan de två balkarna, men den längsgående balken kan också betraktas som den främre delen.
- Fördelar: Vid behov möjliggör hexakopterkonstruktionen enkel tillsats av ytterligare två balkar och motorer, vilket ökar den totala dragkraften, vilket resulterar i att drönaren kan lyfta mer nyttolast. Vid fel på en av motorerna är det möjligt att drönaren kommer att kunna göra en mjuk landning och inte krascha. Modulär ramdesign. Nästan alla flygkontroller stöder denna konfiguration.
- Nackdelar: skrymmande och dyr konstruktion. Ytterligare motorer och delar ökar copterns vikt, därför är det nödvändigt att installera mer rymliga batterier för att få samma flygtid som en quadrocopter.
Y6
- Beskrivning: Konstruktion Y6 är en typ av hexakopter med vid basen, inte sex balkar, utan tre, som var och en är ansluten till ett par koaxiellt monterade motorer (totalt 6 motorer). Det bör noteras att de nedre propellrarna skjuter nedåt.
- Fördelar: Färre komponenter jämfört med hexakopter. Lyfter mer nyttolast jämfört med quadcopter. Vid användning av motroterande skruvar utesluts den gyroskopiska effekten, som i Y3
- Nackdelar: Dyrare jämfört med en quadrocopter på grund av användning av ytterligare delar som motsvarar hexakopterdelarna i kostnad. Ytterligare motorer och delar ökar copterns vikt, vilket innebär att du måste använda ett större batteri för att få samma flygtid som quadcopter. Som praktiken visar är dragkraften som erhålls på Y6 något lägre än den för en konventionell hexakopter, troligen för att den nedre rotorn påverkar den övre rotorns dragkraft. Alla flygkontrollanter stöder inte denna konfiguration.

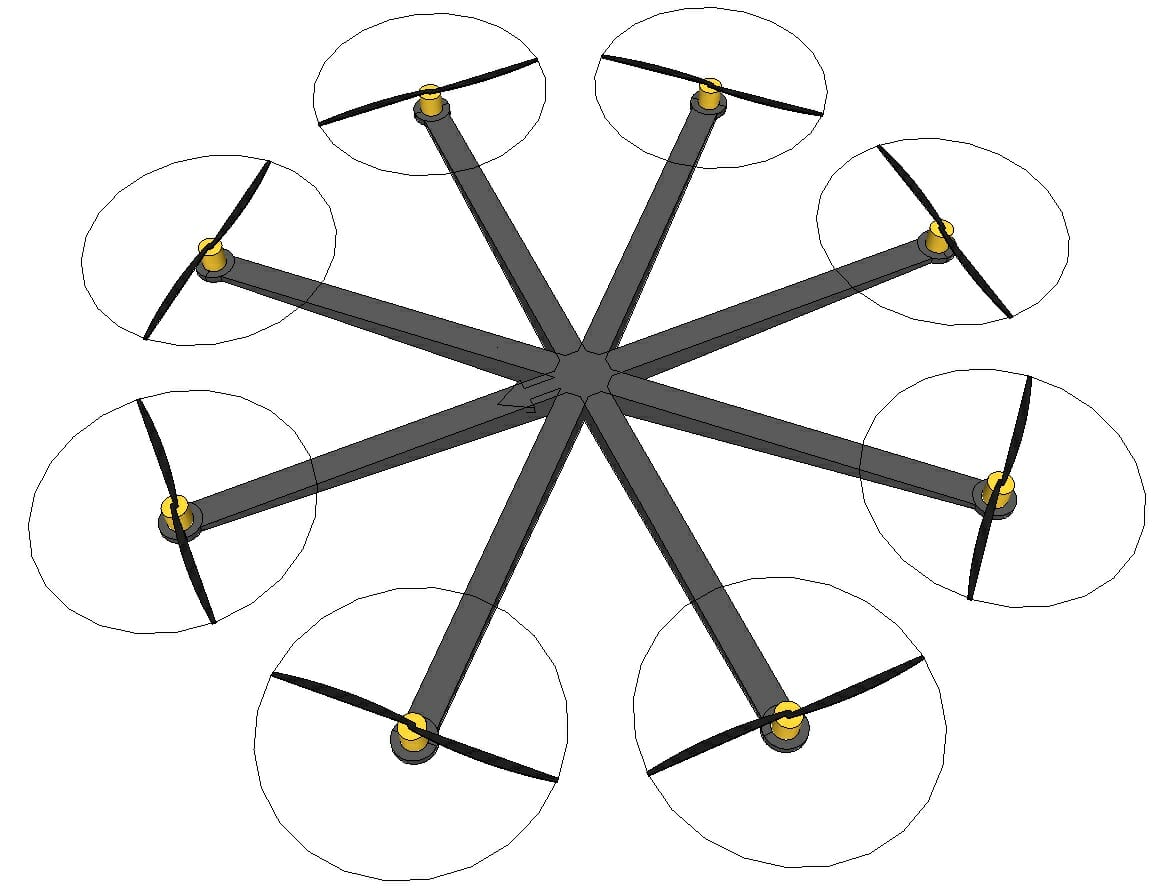
Octocopter
- Beskrivning: Octocopter har åtta balkar, var och en av dem ansluten till motorn. Den främre delen av hexakoptern anses vara sidan av korsningen mellan två balkar.
- Fördelar: Fler motorer = mer dragkraft och därmed ökad redundans, så att drönaren kan navigera med tillförsikt med tunga och dyra DSLR -kameror.
- Nackdelar: Fler motorer = högre pris och större batteri. På grund av dess höga kostnad är den endast relevant för den professionella sfären.
X8
- Beskrivning: X8 -designen är fortfarande en oktokopter, bara inte med åtta, utan med fyra balkar, som var och en är ansluten till ett par koaxiellt monterade motorer (totalt 8 motorer).
- Fördelar: Fler motorer = mer dragkraft och därmed ökad redundans. Mer sannolikt att försiktigt landa drönaren vid ett motorfel.
- Nackdelar: Fler motorer = högre pris och större batteri. På grund av dess höga kostnad är den endast relevant för det professionella verksamhetsområdet.
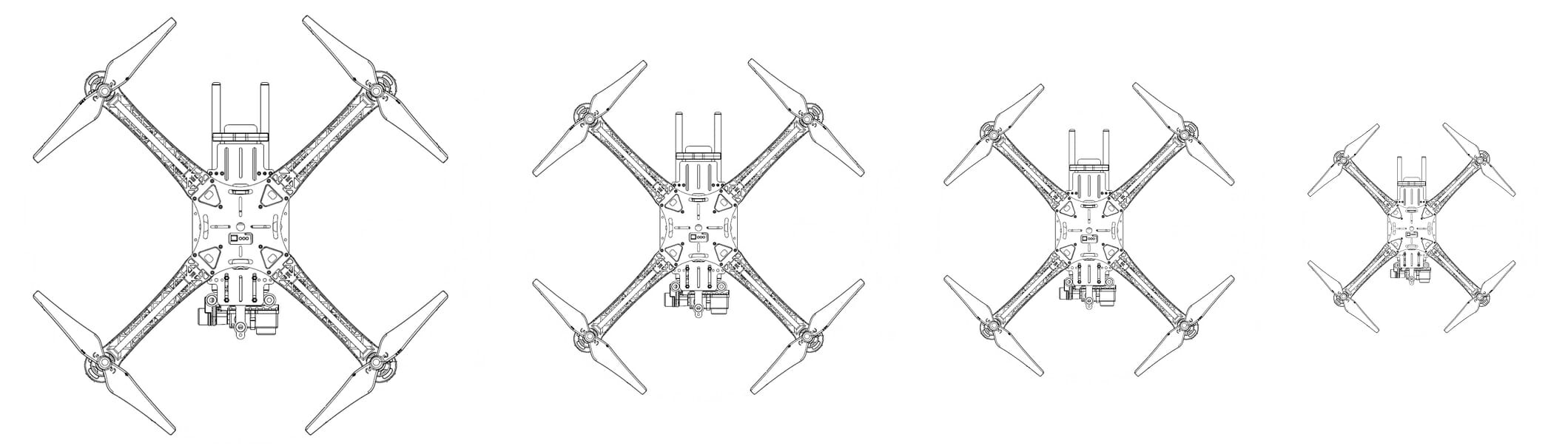
UAV -storlek
UAVs finns i olika storlekar, från Nano, som är mindre än handflatan av din hand, till den större, som bara kan transporteras bak i en lastbil. För de flesta användare som just har börjat med dronehobbyn är det optimala storleksintervallet som ger störst mångsidighet och värde mellan 350 mm och 700 mm. Ramstorleken är diametern på den största cirkeln som korsar var och en av motorerna. Delar till UAV: er av denna storlek har ett brett prisutbud och det största utbudet av produkter som finns.
Material av UAV / konstruktion
Nedan följer de vanligaste utföringsmaterialen som används för tillverkning av ramar för multirotordrönare, respektive, listan är inte komplett. Helst bör ramen vara stel med minsta möjliga vibrationsöverföring.
Skumgummi (Skum) - som det enda materialet för tillverkning av UAV -ramar används sällan, och som regel i kombination med en stel ram eller förstärkt struktur. Kan också användas för strategiska ändamål; som skydd av rotorer (propellrar), chassi, fungerar ofta som ett dämpare. Skumgummi kan vara av olika typer från mjukt till relativt hårt.

Trä - om prioriteten är strukturens billighet är trä ett utmärkt alternativ som avsevärt minskar tid för montering och tillverkning av reservdelar. Trä är tillräckligt hårt och är ett tidstestat material. Det är viktigt att perfekt rakt trä används vid tillverkning av ramen (utan böjning och deformation).

Plast - finns endast för de flesta användare i form av plastark. Tenderar att böja sig och är som sådan inte idealiskt. Perfekt för att göra rullburar eller chassi. Om du överväger 3D -utskrift bör du överväga produktionstidsintervallet (det kan vara lättare att köpa ett UAV -ramkit). 3D -utskrift av delar har fungerat bra för små quadcopters.

Aluminium - kommer till konsumenten i olika former och storlekar. Du kan använda aluminiumplåt för kroppen eller extruderad aluminium för drönarbalkarna. Aluminium är inte lika lätt som kolfiber eller G10, men pris och hållbarhet är materialets främsta fördelar. I stället för att gå sönder eller spricka tenderar aluminium att böja sig. För att arbeta med materialet krävs bara en såg och en borr.
G10 (en typ av glasfiber) - trots att utseendet och de grundläggande egenskaperna är nästan identiska med kol (kolfiber) är ett billigare material. Det finns främst i arkform och används för att förverkliga de övre och nedre ramplattorna. Till skillnad från kolfiber blockerar G10 inte RF -vågor.
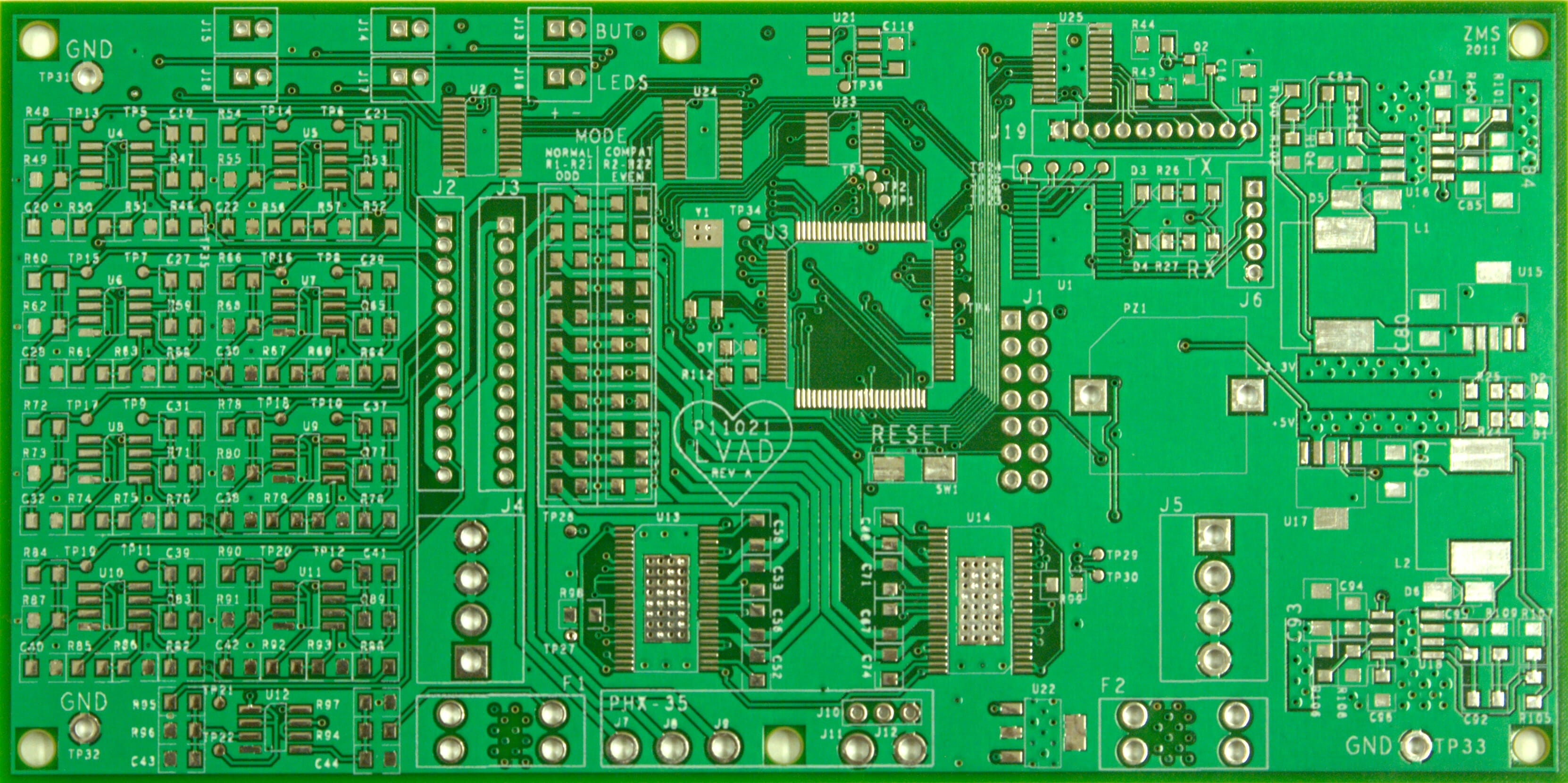
PCB (kretskort - dielektrisk platta) - i själva verket en analog av glasfiber, men till skillnad från den senare, de är alltid platta. Ibland används som övre och nedre ramplattor för att minska antalet delar som används (till exempel är en kraftfördelningskort ofta inbyggd i bottenpanelen). Ramar nanokretskort
Kolfiber är det mest eftertraktade materialet på grund av dess låga vikt och höga hållfasthet. Tillverkningsprocessen är fortfarande helt manuell. Som regel massproduceras enkla former, såsom platta ark, rörformiga komponenter; utförandet av komplexa tredimensionella former utförs på beställning.
Ytterligare överväganden
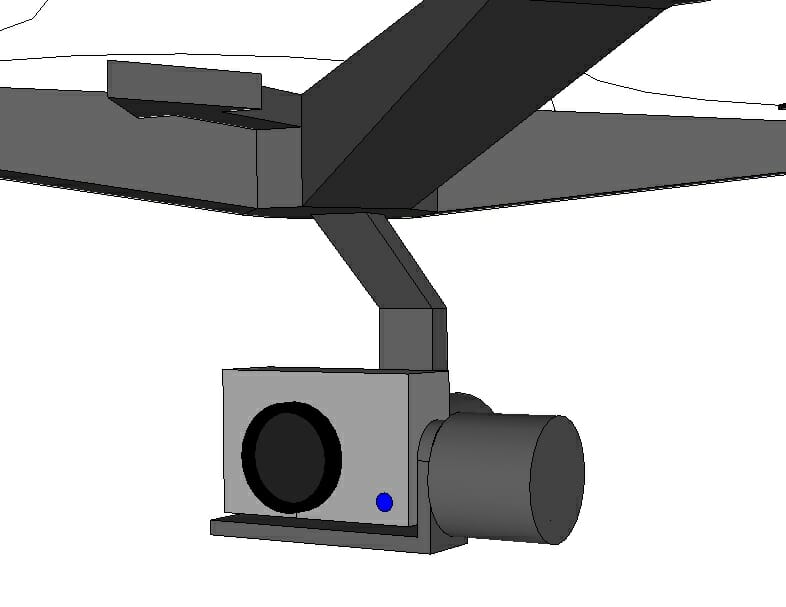
- Gimbal - används oftast för att stabilisera kameran (FPV / Flygfotografering). Som regel är den installerad under ramen i enlighet med UAV: s tyngdpunkt. Kan fästas direkt på ramen eller med hjälp av skenor. För bildstabilisering rekommenderas att använda två eller tre axel gimbal. Kräver en ökning av landningsbenens längd.
- Nyttolast (transport) - i amatörfältet är något av en lyx, så hur varje extra vikt minskar inte bara flygtiden, utan leder också till att användningen av ytterligare element som kan lägga till viktiga funktioner till drönaren avvisas. Vid konstruktionen bör det förstås att transportväskan ska vara så lätt som möjligt och samtidigt stark, och själva lasten bör vara fastspänd, exklusive all rörelse under flygning.

- Landningsfötter - trots att vissa UAV landar direkt på ramen (vanligtvis uteslutet för att minska vikten), kommer användningen av landningsstöd i konstruktionen att ge ett gap mellan den nedre delen av UAV och en ojämn yta, och i händelse av en hård landning tar de ett slag, vilket ökar chanserna att rädda sådana viktiga element i drönaren som kamera, upphängning, batteri och ram.
- Installation - trots att design och tillverkning av en drönare är mycket enklare än en konventionell helikopter, bör placeringen av varje element övervägas i början av designprocessen.
Allmänna installationsanvisningar:
- När du skapar en ram från grunden är det viktigt att säkerställa den exakta positionen för de fyra monteringshål genom vilka motorerna är fästa på ramen...
- De flesta motorer för ramar från 400 mm till 600 mm har samma monteringshålsmönster, vilket gör att en ram från en tillverkare kan användas och motorer från en annan.
- Placeringen av alla ytterligare komponenter bör helst vara symmetrisk kring en axel, vilket senare hjälper till att underlätta sökning och justering av drommans masscentrum.
- Helst ska flygkontrollen vara placerad i mitten av cirkeln (och som sådan i massans centrum) som förbinder alla motorer.
- Flygkontrollen är vanligtvis fäst på ramen med hjälp av stöttor, gummidämpare eller dubbelsidig tejp.
- Många tillverkare använder samma monteringshålsmönster för flygkontrollen (t.ex. 35 mm eller 45 mm kvadrat), men det finns ingen aktuell "industristandard".
- Batteriet är tillräckligt tungt, och om massans centrum i din enhet har rört sig lite kan du justera det genom att flytta batteriet något.
- Se till att batterifästet spelar lite, men samtidigt säkerställer det att batteriet hålls säkert på plats.
- Kardborrband används ofta för att säkra batterier, men det är en bra idé att lägga till dubbelsidig tejp mellan batteriet och ramen.

Riktlinjer
Steg 1: Se vilka material och verktyg för bearbetning som finns tillgängliga för ditt förfogande.
- Om din arsenal av funktioner inte räcker för att implementera en anpassad ram eller bara vill ha en professionell ram, överväg att köpa ett UAV -rampaket.
- Även om ramen är tillverkad med rätt verktyg och grundmaterial kan den fortfarande ha strukturella svagheter som orsakar överdriven vibration eller förskjutning. Tillverkningsprocessen kräver skarp syn och erfarenhet.
- När du gör ramen själv, tänk på fästningen av alla nödvändiga element i drönaren; motorer, elektronik etc.
Steg 2: Lista alla ytterligare (tillbehör) delar som du planerar att inkludera i enheten.
- Det kan vara en-, två- eller treaxlad gimbal för en kamera, en fallskärm, en inbyggd minidator, en nyttolast, långdistanselektronik (som regel gör det församlingen tyngre och större), flytande utrustning etc.
- Den resulterande listan över ytterligare / hjälpdelar ger en uppfattning om drönarens dimensioner och beräknar den totala massan.
Steg 3: Tänk på den uppskattade bildstorleken.
- En stor ram är inte nödvändigtvis en stor potential för en drönare, och en mindre ram kanske inte gör montering billigare.
- En drönare byggd på en ram på 400 - 600 mm rekommenderas för nybörjare.
.Steg 4: Designa, bygg och testa ramen.
- Om du köpte UAV -rampaketet har du inget att oroa dig för när det gäller styrka, styvhet och konstruktion.
- Om du väljer att designa och bygga en ram från grunden är det viktigt att kontrollera dess styrka, vikt och se till att strukturen tål vibrationer (minimal böjning).
- Överväg att använda specialiserad modelleringsprogramvara (många är gratis, till exempel Google Sketchup) för att designa ramen och se till att måtten är korrekta.
Nu har du en ram och du kan gå vidare till nästa lektion.







