เนื้อหา
บทนำ
หกบทเรียนแรกสำรวจข้อควรพิจารณาในการออกแบบเบื้องหลังการสร้าง UAV / Drone แบบหลายเครื่องยนต์โดยเฉพาะ บทที่ 7 ไม่ครอบคลุมถึงด้านการประกอบ แต่อธิบายอุปกรณ์เสริม / อุปกรณ์เพิ่มเติมจำนวนหนึ่งที่ใช้ในการดำเนินการบินคนแรก (FPV) และการควบคุมระยะไกล บทความนี้เน้นไปที่การใช้การควบคุมวิทยุใน "สนาม" มากขึ้น ตรงข้ามกับการบินในอาคารหรือในสถานที่ที่สามารถจ่ายไฟได้ โปรดทราบว่าบทช่วยสอนนี้ครอบคลุมเฉพาะข้อมูลขนาดเล็กมากที่จำเป็นต่อการทำความเข้าใจระบบ FPV / Long Range อย่างถูกต้อง และมีวัตถุประสงค์หลักเพื่อแนะนำผู้อ่านถึงแนวคิด เงื่อนไข ผลิตภัณฑ์ และหลักการเบื้องหลัง FPV และการควบคุมโดรนระยะไกล
มุมมองบุคคลที่หนึ่ง (FPV)
มุมมองบุคคลที่หนึ่ง (FPV) เป็นหนึ่งในแรงผลักดันหลักที่อยู่เบื้องหลังความนิยมที่เพิ่มขึ้นอย่างรวดเร็วของ UAV หลายเครื่องยนต์ ช่วยให้คุณได้รับ มุมมองที่แตกต่างอย่างสิ้นเชิง ("มุมมองตานก") ของโลกของเราและความรู้สึกของการบิน แม้ว่าการเพิ่มกล้องลงใน UAV จะไม่ใช่เรื่องใหม่ แต่การควบคุมที่ง่าย ราคาต่ำ และโดรนที่หลากหลายทำให้ง่ายต่อการซื้อหรือสร้างโดรนด้วยกล้อง
มุมมองบุคคลที่หนึ่ง (FPV) ในปัจจุบันมีการใช้งานโดยใช้ควบคู่ที่ติดตั้งไว้ล่วงหน้าบนเครื่องบิน ซึ่งประกอบด้วยกล้อง FPV และเครื่องส่งวิดีโอ ซึ่งช่วยให้สามารถส่งวิดีโอแบบเรียลไทม์ไปยังนักบินหรือผู้ช่วย. โปรดทราบว่ามีระบบ FPV แบบสำเร็จรูปหรือกึ่งสำเร็จรูปในตลาด ซึ่งในทางกลับกัน ระบบ FPV แบบสำเร็จรูปช่วยให้ผู้ใช้มั่นใจได้ว่าองค์ประกอบทั้งหมดจะเข้ากันได้
กล้องวิดีโอ
- กล้องวิดีโอเกือบทุกชนิดที่มีความสามารถในการเชื่อมต่อกับเครื่องส่งวิดีโอสามารถใช้ ใช้การบินด้วย FPV ดังนั้น อย่างไรก็ตาม น้ำหนักเป็นสิ่งสำคัญที่ต้องพิจารณา เนื่องจาก UAV แบบหลายเครื่องยนต์ต้องต่อสู้กับแรงโน้มถ่วงอย่างต่อเนื่องและขาดข้อได้เปรียบของเครื่องบินแบบมีปีกเพื่อเพิ่มแรงยกเพิ่มเติม
- กล้องวิดีโอมีรูปร่างและขนาดที่หลากหลาย และยังสามารถมีศักยภาพที่แตกต่างกันในด้านคุณภาพของการถ่ายทำ อย่างไรก็ตาม ในปัจจุบัน มีเพียงไม่กี่ตัวเท่านั้นที่ได้รับการดัดแปลงสำหรับ UAV โดยเฉพาะเนื่องจากข้อจำกัดด้านขนาด น้ำหนัก และประสิทธิภาพ กล้องส่วนใหญ่ที่ใช้ในระบบ FPV แบบหลายมอเตอร์จึงมาจาก "กล้องแอคชั่นคาเมร่า" เช่นเดียวกับกล้องวงจรปิดและแอพพลิเคชั่นความปลอดภัย (เช่น กล้องที่ซ่อนอยู่)
- กล้องขนาดใหญ่เช่น DSLR (SLR) หรือกล้องวิดีโอขนาดใหญ่มักถูกใช้โดยมืออาชีพ แต่เนื่องจากน้ำหนักของมัน โดรนที่ต้องใช้จึงมีแนวโน้มที่จะค่อนข้างใหญ่
- กล้องวิดีโอบางรุ่นสามารถใช้พลังงานได้โดยตรงจากแหล่งจ่ายไฟ 5V (มีประโยชน์เนื่องจากตัวควบคุมการบินส่วนใหญ่ทำงานที่ 5V เมื่อใช้พลังงานจาก BEC) ในขณะที่บางรุ่นอาจต้องใช้ 12V หรือแม้แต่แบตเตอรี่แบบชาร์จไฟได้ในตัว
- กล้องที่ได้รับความนิยมมากที่สุดในปัจจุบันที่ใช้กับ UAV แบบหลายเครื่องยนต์คือ GoPro เนื่องจากความทนทาน ขนาดเล็ก คุณภาพวิดีโอ/ภาพถ่ายสูง แบตเตอรี่ในตัว อุปกรณ์เสริมหลากหลาย และมีจำหน่ายทั่วโลก กล้อง GoPro ยังมีเอาต์พุต USB ที่สามารถใช้สำหรับการส่งสัญญาณวิดีโอ และบางรุ่นยังมี WiFi ในตัวสำหรับการส่งสัญญาณวิดีโอระยะสั้นอีกด้วย
- จากความสำเร็จของ GoPro ผู้ผลิตรายอื่น ๆ จำนวนมากได้สร้างกลุ่มผลิตภัณฑ์กล้องกีฬา / แอ็คชั่นที่คล้ายกัน แต่รายละเอียดราคาและคุณภาพแตกต่างกันไป โปรดทราบว่าหากคุณต้องการวิดีโอ 3 มิติ คุณจะต้องมีกล้องสองตัวและ VTX หนึ่งตัวที่สามารถส่งสัญญาณได้สองตัว

Gimbal
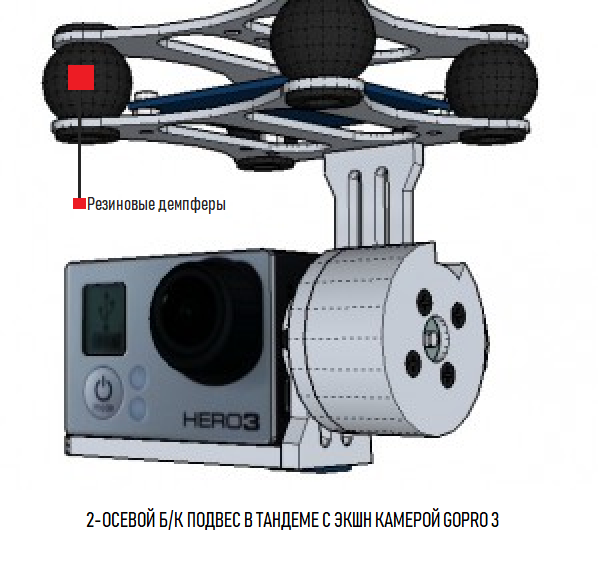
Gimbal ประกอบด้วยโครงเครื่องกล มอเตอร์สองตัวหรือมากกว่า (โดยปกติถึงสามตัวสำหรับการแพน, เอียง และม้วน) รวมทั้งเซ็นเซอร์และอุปกรณ์อิเล็กทรอนิกส์ กล้องได้รับการติดตั้งเพื่อให้มอเตอร์ไม่ต้องให้แรงเชิงมุม (แรงบิด) เพื่อให้กล้องอยู่ในมุมคงที่ ("สมดุล")
แกนที่เป็นปัญหาช่วยให้คุณสามารถแพน เอียง หรือแพนกล้องได้ ระบบ 1 แกนที่ไม่มีเซ็นเซอร์ของตัวเองถือได้ว่าเป็นระบบแพนหรือเอียง การออกแบบที่ได้รับความนิยมมากที่สุดเกี่ยวข้องกับการติดตั้งมอเตอร์คู่ (โดยปกติคือมอเตอร์ BLDC ที่ออกแบบมาเป็นพิเศษสำหรับใช้กับกิมบอลส์) ซึ่งควบคุมการเอียงและการแพนของกล้อง ดังนั้น กล้องจึงหันไปทางด้านหน้าของโดรนเสมอ ซึ่งทำให้แน่ใจได้ว่านักบินจะไม่สับสนหากกล้องหันไปทางเดียวและด้านหน้าของโดรนในอีกทางหนึ่ง
gimbal แบบ 3 แกนเพิ่มการแพนกล้อง (ซ้ายและขวา) และมีประโยชน์มากที่สุดควบคู่ไปกับโอเปอเรเตอร์สองคน โดยที่คนหนึ่งใช้โดรน และอีกคนสามารถควบคุมกล้องได้อย่างอิสระ ในการกำหนดค่าสองคนนี้ สามารถใช้กล้อง FPV ตัวที่สอง (คงที่) สำหรับนักบินได้โดยทั่วไป ระบบกิมบอลมีอยู่สองประเภท:
กิมบอลไร้แปรงถ่าน
- มอเตอร์กระแสตรงไร้แปรงถ่าน (BLDC) หรือมอเตอร์ซิงโครนัสแม่เหล็กถาวร (PMSM) หรือ (มอเตอร์วาล์ว (VD))) - ให้การตอบสนองที่รวดเร็วโดยมีการสั่นสะเทือนน้อยที่สุด แต่ต้องใช้คอนโทรลเลอร์ DC แบบไม่มีแปรงแยกต่างหาก (และเฉพาะ)
- เพื่อรักษาระดับของกล้องโดยอัตโนมัติ มีการติดตั้งหน่วยวัดแรงเฉื่อย (IMU) ซึ่งประกอบด้วยมาตรความเร่งและไจโรสโคปติดตั้งไว้ที่ใดที่หนึ่งรอบ ๆ กล้อง (โดยปกติอยู่ใต้ตัวยึดกล้อง) เพื่อให้ตำแหน่งของ สามารถติดตามกล้อง (เทียบกับพื้น) ได้ ค่าที่อ่านได้จากบล็อกจะถูกส่งไปยังบอร์ดควบคุม DC brushless แยกต่างหาก (มักจะติดตั้งอยู่เหนือ gimbal โดยตรง) ซึ่งจะหมุนมอเตอร์เพื่อให้กล้องอยู่ในทิศทางที่แน่นอนแม้จะมีการเคลื่อนไหวของโดรนก็ตาม
- แผงควบคุมประกอบด้วยไมโครคอนโทรลเลอร์ในตัว ตัวควบคุม DC แบบไม่มีแปรงของ gimbal สามารถเชื่อมต่อโดยตรงกับช่องสัญญาณบนเครื่องรับ (ซึ่งต่างจากตัวควบคุมการบิน) เนื่องจากจะตอบสนองต่อการเปลี่ยนแปลงในทิศทางของกล้อง ไม่ใช่การวางแนว UAV ดังนั้นจึงไม่ขึ้นอยู่กับตัวควบคุมการบิน
- โปรดทราบว่าเนื่องจาก GoPro เป็นกล้องแอคชั่นยอดนิยม กิมบอลไร้แปรงถ่านส่วนใหญ่ได้รับการออกแบบให้ใช้กับ GoPro รุ่นใดรุ่นหนึ่งขึ้นไป (ขึ้นอยู่กับขนาด GoPro จุดศูนย์ถ่วง ตำแหน่งของกล้อง ฯลฯ) คุณจะสังเกตเห็นว่าไม้กันสั่น BLDC มักจะมีการหน่วงที่ช่วยลดการสั่นสะเทือนที่ส่งผ่านจากโดรนไปยังกล้อง
RC servo gimbal
- ที่หัวใจของ RC servo gimbals - ไดรฟ์เซอร์โวมีแนวโน้มที่จะให้เวลาตอบสนองช้ากว่าแบบไม่มีแปรง gimbals และการสั่นสะเทือนมากเกินไป ในเวลาเดียวกัน ระบบเซอร์โวมีราคาถูกกว่าระบบไร้แปรงถ่านมาก และส่วนใหญ่เซอร์โวแบบ 3 พินสามารถเชื่อมต่อโดยตรงกับตัวควบคุมการบิน ซึ่งช่วยให้คุณใช้ IMU ในตัวในพีซีเพื่อกำหนดระดับที่สัมพันธ์กับ กราวด์แล้วขยับเซอร์โว

เครื่องส่งสัญญาณวิดีโอ (VTX)
) มี VTX ในตัว ซึ่งหมายความว่า VTX retrofit แยกต่างหาก มักจะจำเป็น VTX ที่ใช้ในงานอดิเรกของโดรนเป็นที่นิยมในปัจจุบัน เนื่องจากมีน้ำหนักเบาและมีขนาดเล็ก สามารถใช้ VTX ของบริษัทอื่นได้ แต่ในกรณีนี้ มีข้อควรพิจารณาในการเชื่อมต่อพลังงานที่สำคัญ (อาจจำเป็นต้องกำหนดค่าหากอุปกรณ์ยอมรับเฉพาะพลังงานจากขั้วต่อ "Barrel") และแรงดันไฟฟ้าขาเข้า หากอุปกรณ์วิดีโอทำงานที่แรงดันไฟฟ้าที่ไม่ได้อยู่บนเครื่องของคุณ ซึ่งคุณอาจต้องใช้อุปกรณ์อิเล็กทรอนิกส์เพิ่มเติม เช่น ตัวควบคุมแรงดันไฟฟ้าVTX ที่ไม่ส่งผลกระทบต่องานอดิเรกของโดรนนั้นไม่ค่อยน่าพอใจในแง่ของน้ำหนักหรือขนาด และมักจะถูกใส่ไว้ในเคสป้องกัน (และบางครั้งก็หนักเกินความจำเป็น)
พลังงาน VTX
โดยทั่วไป VTX ได้รับการจัดอันดับสำหรับกำลังขับเฉพาะ แต่ไม่ควรสันนิษฐานว่าทุกคนสามารถใช้ระดับพลังงานใด ๆ ที่มีในตลาด. ความถี่และพลังงานไร้สายได้รับการตรวจสอบและควบคุมอย่างระมัดระวัง ดังนั้นจึงขอแนะนำเป็นอย่างยิ่งให้คุณตรวจสอบระเบียบข้อบังคับเกี่ยวกับระบบไร้สายในประเทศที่คุณอาศัยอยู่
พลังงานที่ใช้โดย VTX ส่งผลโดยตรงต่อช่วงสูงสุดของสัญญาณ ในอเมริกาเหนือ เครื่องส่งไร้สายที่กินไฟมากกว่าพลังงานที่กำหนด (เป็นวัตต์) กำหนดให้ผู้ปฏิบัติงานต้องได้รับอนุญาตจากผู้ให้บริการวิทยุสมัครเล่น (HAM) เพื่อใช้งาน ตัวอย่างเช่น ในแคนาดา ผู้ให้บริการ FPV ระยะไกลมักจะต้องผ่านการทดสอบความสามารถทางวิทยุสมัครเล่นขั้นพื้นฐานเป็นอย่างน้อย เพื่อทำงานโดยใช้พลังงานที่จำเป็นสำหรับแอปพลิเคชันไร้สายระยะไกล
หากคุณไม่ผ่านการรับรอง ขอแนะนำอย่างยิ่งให้คุณใช้เครื่องส่งสัญญาณวิดีโอที่มีขนาดน้อยกว่า 200 mW เพื่อหลีกเลี่ยงความเสี่ยงที่จะถูกดำเนินคดี (เจ้าหน้าที่อาจติดต่อคุณหากสัญญาณของคุณรบกวนสัญญาณไร้สายอื่นๆ)
พลังงานสำหรับ VTX มักจะมาจาก BEC จาก ESC ตัวใดตัวหนึ่งซึ่งให้พลังงานแก่อุปกรณ์อิเล็กทรอนิกส์ที่เหลือด้วย หากคุณสงสัยว่าอุปกรณ์อิเล็กทรอนิกส์ทั้งหมดกำลังดึงกระแสไฟมากกว่าที่ BEC สามารถจ่ายได้ คุณสามารถใช้ BEC จาก ESC ตัวที่สองเพื่อจ่ายไฟให้กับ VTX ไม่แนะนำให้ใช้แบตเตอรี่แยกต่างหากเพื่อจ่ายไฟให้กับ VTX
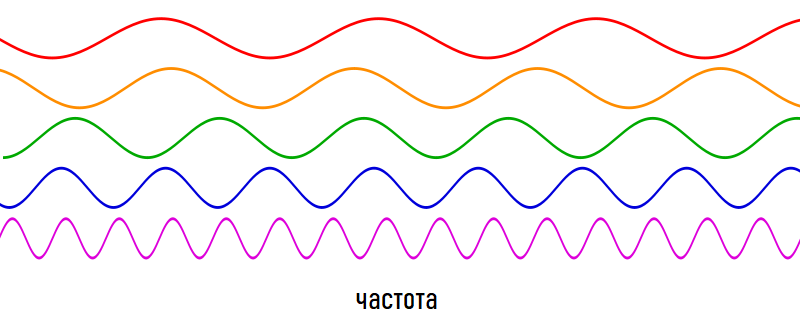
ความถี่ VTX / ช่องสัญญาณ
VTX ส่วนใหญ่ทำงานที่ความถี่ใดความถี่หนึ่งที่แสดงด้านล่าง โปรดทราบว่าเนื่องจากคุณอาจจะใช้อุปกรณ์ควบคุมมาตรฐานที่ทำงานที่ความถี่เฉพาะอยู่แล้ว ดังนั้นจึงควรเลือก VTX เพื่อไม่ให้ความถี่ตรงกัน ตัวอย่างเช่น หากรีโมทคอนโทรลของคุณทำงานที่ 2.4GHz คุณควรมองหา VTX ที่มีความถี่ในการทำงาน 900MHz, 1.2GHz หรือ 5.8GHz
900MHz (0.9GHz)
- สัญญาณความถี่ต่ำสามารถเจาะผนังและต้นไม้ได้ง่ายขึ้น
- เสาอากาศ DIY ใช้งานง่าย ทำให้เพราะความถี่ต่ำหมายถึงเสาอากาศขนาดใหญ่
- คุณภาพของภาพไม่ดีเท่ากับที่ 5.8GHz
- อาจส่งผลเสียต่อเครื่องรับ GPS
- ถือว่าเป็นเทคโนโลยี "เก่า"
- โดยรวมดีที่สุดสำหรับช่วงกลาง
1.2GHz (1.2 ถึง 1.3 GHz)
- ใช้สำหรับเที่ยวบินระยะไกล FPV เนื่องจากมีระยะทางที่ดี
- เสาอากาศที่แตกต่างกันมากมายในตลาด
- ความถี่ที่อุปกรณ์อื่น ๆ มักใช้
- กำแพงและสิ่งกีดขวางมีผลกระทบมากกว่าความถี่ต่ำ
- ระยะกลาง / ยาว
2.4GHz (2.3 ถึง 2.4GHz)
- ใช้สำหรับ FPV ในระยะทางไกลโดยมีอุปสรรคเล็กน้อย
- หนึ่งในความถี่ที่ใช้กันอย่างแพร่หลายมากที่สุดสำหรับ สำหรับอุปกรณ์ไร้สาย
- มีอุปกรณ์เสริมมากมาย (เสาอากาศ เครื่องส่งสัญญาณ ฯลฯ)
- ห้ามใช้ใกล้กับเครื่องส่ง RC แบบขนานหรืออุปกรณ์อื่นๆ ที่อาจก่อให้เกิดการรบกวน
- อาจทำงานกับความถี่อื่น ๆ แต่จะไม่ครอบคลุมในส่วนนี้
5.8GHz
- เหมาะสำหรับการใช้งานระยะสั้น
- กำแพงและสิ่งกีดขวางอื่น ๆ มีผลกระทบอย่างมากต่อช่วง
- เสาอากาศมีขนาดเล็ก / กะทัดรัด
- ดีที่สุดสำหรับ FPV ใน การแข่งโดรน
ตามที่คุณอาจสังเกตเห็น อุปกรณ์ไร้สายทั่วไปจำนวนมากทำงานที่ 2.4GHz (เราเตอร์ไร้สาย โทรศัพท์ไร้สาย บลูทูธ ที่เปิดประตูโรงรถ ฯลฯ) สาเหตุส่วนใหญ่มาจากข้อเท็จจริงที่ว่าข้อบังคับของรัฐของ FCC กำหนดว่าย่านความถี่รอบช่วงนี้ไม่จำเป็นต้องมีใบอนุญาตในการดำเนินงาน เหมือนกันสำหรับ 900MHz, 1.2GHz และ 5.8GHz (ภายในช่วงพลังงานที่ระบุ) ช่วงความถี่ที่ไม่มีใบอนุญาตรวมถึงช่วงความถี่อิสระที่เรียกว่า ISM (จากช่วงความถี่อุตสาหกรรม วิทยาศาสตร์ การแพทย์: อุตสาหกรรม วิทยาศาสตร์ และการแพทย์ของอังกฤษ) ใช้ย่านความถี่ตั้งแต่ 2400 ถึง 2483.5 MHz ในสหรัฐอเมริกาและยุโรป และตั้งแต่ 2471 ถึง 2497 MHz ในประเทศญี่ปุ่น ซึ่งหมายความว่าผู้บริโภคทุกคนสามารถซื้ออุปกรณ์ไร้สายที่ทำงานบนความถี่เหล่านี้ได้โดยไม่ต้องกังวลเกี่ยวกับกฎระเบียบหรือแนวทางปฏิบัติ ข้อมูลเพิ่มเติมเกี่ยวกับการจัดสรรคลื่นความถี่วิทยุสมัครเล่นสามารถพบได้ในวิกิพีเดีย
ขั้วต่อ VTX
VTX บางตัวไม่มีขั้วต่อเหมือนกัน ดังนั้นสิ่งสำคัญคือต้องรู้ว่าขั้วต่อใดติดตั้งอยู่ในกล้องที่เลือก และดูว่าสามารถเชื่อมต่อและใช้งานได้หรือไม่ VTX ที่เลือก ตัวเชื่อมต่อที่ได้รับความนิยมมากที่สุดคือตัวเชื่อมต่อแบบคอมโพสิต มินิ / ไมโคร USB และตัวเชื่อมต่อ 0.1 "(แอนะล็อก) มีอะแดปเตอร์ / อะแดปเตอร์จำนวนมากในท้องตลาดเช่น 0.1″ ตัวเชื่อมต่อ FPV Tx - miniUSB สำหรับใช้กับกล้อง GoPro ซึ่งช่วยลดความยุ่งยากในการใช้ผลิตภัณฑ์ดังกล่าวอย่างมาก
VTX บางรุ่นอาจมีอินพุตเสียงด้วย อย่างไรก็ตาม ในกรณีส่วนใหญ่เสียงจากระบบส่งกำลังจะกลบเสียงใดๆ ที่คุณหวังว่าจะบันทึก หากคุณต้องการเสียง อย่าลืมจัดตำแหน่งไมโครโฟนให้ห่างจากมอเตอร์มากที่สุด (ต้องใช้การทดสอบอย่างมากเพื่อค้นหาตำแหน่งที่เหมาะสมที่สุด) และเลือกเครื่องรับที่เข้ากันได้
เสาอากาศ VTX
เสาอากาศ VTX ที่ใช้กับอากาศยานไร้คนขับมักจะเป็น "เป็ด" หรือ "แส้" เสาอากาศเป็ดเป็นเสาอากาศที่พบได้บ่อยที่สุดและมีข้อดีตรงที่มีขนาดกะทัดรัด ราคาไม่แพง และคงอยู่กับที่ในระหว่างการบินเนื่องจากมีขนาดเล็ก
การเลือกเสาอากาศควรตรงกับความถี่ VTX ความถี่ที่สูงขึ้นต้องใช้เสาอากาศขนาดเล็ก แต่สัญญาณที่ส่งผ่านอุปสรรคได้ยากกว่า ความถี่ต่ำมีความอ่อนไหวต่อการรบกวนน้อยกว่า แต่ต้องการเสาอากาศขนาดใหญ่/ยาว เสาอากาศแบบมีทิศทางมักไม่ค่อยใช้สำหรับการส่งวิดีโอ เนื่องจาก UAV สามารถอยู่ในทิศทางใดก็ได้ในพื้นที่สามมิติ ตามหลักการแล้ว เสาอากาศควรอยู่ที่ใดที่หนึ่งใน UAV ซึ่งไม่มีแหล่งที่มาของสัญญาณไร้สายอื่นๆ หรือสัญญาณรบกวนทางไฟฟ้า
เครื่องรับวิดีโอ (VRX)
เครื่องรับวิดีโอมีแนวโน้มที่จะมีขนาดใหญ่กว่า (ทางกายภาพ) เล็กน้อยและหนักกว่า VTX เนื่องจาก ตัวรับสัญญาณมักจะอยู่กับที่ (เชื่อมต่อกับหน้าจอ) ในขณะที่ตัวส่งสัญญาณติดตั้งอยู่บนโดรน ดังนั้นควรมีขนาดเล็กและน้ำหนักเบา เพื่อประหยัดพื้นที่ ผู้ผลิตจอ LCD บางรายได้รวมเครื่องรับสัญญาณไร้สายความถี่มาตรฐานไว้ในจอภาพ
ผู้ที่ชื่นชอบ FPV หลายคนใช้เสาอากาศ Clover Leaf หรือ Pinwheel บนแว่นตา FPV ซึ่งช่วยให้พวกเขาหันศีรษะไปในทิศทางของเสียงพึมพำเพื่อเพิ่มความแรงของสัญญาณ ผู้ผลิตแว่นตา FPV หลายรายยังสนับสนุนแนวโน้มนี้และเริ่มที่จะรวมตัวรับสัญญาณวิดีโอไร้สายและเสาอากาศไว้ในแพ็คเกจแว่นตา
เห็นได้ชัดว่าความถี่ที่เครื่องรับวิดีโอทำงานต้องตรงกับความถี่ของเครื่องส่งสัญญาณ อย่างไรก็ตาม เครื่องรับบางรุ่นมีช่องสัญญาณที่หลากหลาย (ทีละช่อง) ทำให้เข้ากันได้กับ VTX ที่หลากหลาย เอาต์พุตของเครื่องรับวิดีโอมีแนวโน้มที่จะเป็นแบบคอมโพสิต (ทั่วไป) หรือ HDMI สิ่งที่จะเชื่อมต่อกับเอาต์พุต (การแสดงผลวิดีโอ) นั้นขึ้นอยู่กับคุณ และตัวเลือกบางตัวจะอธิบายไว้ด้านล่าง การเปิดเครื่องรับในสนามมักเกี่ยวข้องกับการใช้แบตเตอรี่ที่ให้แรงดันเอาต์พุตที่ตรงกับแรงดันไฟฟ้าในการทำงานของเครื่องรับ หรือแบตเตอรี่ที่เชื่อมต่อกับตัวควบคุมแรงดันไฟฟ้าเพื่อให้แรงดันไฟฟ้าที่ต้องการ โปรดทราบว่าไม่มีเครื่องรับวิดีโอ "ระยะไกล" เนื่องจากช่วงสัญญาณขึ้นอยู่กับกำลังของเครื่องส่งสัญญาณและเสาอากาศที่ถูกต้อง

เสาอากาศรับสัญญาณวิดีโอ
เสาอากาศที่ใช้กับเครื่องรับสัญญาณวิดีโอสามารถเป็นแบบรอบทิศทาง (สามารถรับสัญญาณจากทิศทางใดก็ได้) หรือทิศทาง. เสาอากาศทั่วไปที่สามารถพบได้บนเครื่องรับวิดีโอ ได้แก่ เสาอากาศ Duck, Cloverleaf / Pinwheel หรือในบางกรณีที่ไม่ค่อยพบคือ Directional (เช่น "Yagi") เสาอากาศแบบมีทิศทางจะมีความเกี่ยวข้องเฉพาะเมื่อ UAV กำลังบินไปในทิศทางที่แน่นอนซึ่งสัมพันธ์กับผู้ควบคุม และโดรนจะอยู่ที่ "ด้านหน้า" ของเสาอากาศเสมอเพื่อไม่ให้สัญญาณสูญหาย สถานการณ์อาจรวมถึงการสำรวจพื้นที่เฉพาะ (เช่น ทุ่งนา) หรือพื้นที่ที่ห่างไกลจากผู้ปฏิบัติงาน

การแสดงผลวิดีโอ
จอ LCD (จอ LCD)
- เมื่อพิจารณาจอภาพ LCD สิ่งสำคัญคือต้องทราบความแตกต่างระหว่างจอ LCD เดสก์ท็อป/คอมพิวเตอร์หรือ LCD TV กับจอ LCD ที่ออกแบบมาเพื่อพกพา จอทีวี / คอมพิวเตอร์มักจะมีขั้วต่อสายไฟที่เข้ากันได้กับสายไฟคอมพิวเตอร์มาตรฐาน (ดึงไฟ AC โดยตรง) ทำให้ใช้งานกับแบตเตอรี่ได้ยากมาก จอแสดงผล LCD/OLED ซึ่งน่าจะพกพาสะดวกกว่า มักจะดึงกระแสไฟตรงและต้องใช้หม้อแปลงภายนอกเพื่อเชื่อมต่อกับแหล่งจ่ายไฟหลัก (A / C)
- ขนาด อัตราการรีเฟรช และคุณภาพการแสดงผลของจอแสดงผลที่ใช้สำหรับแอปพลิเคชัน FPV มีตั้งแต่จอภาพขนาดเล็กที่มีภาพเป็นเม็ดเล็กๆ จอภาพที่อัปเดตหลายครั้งต่อวินาที ไปจนถึงจอแสดงผลขนาดใหญ่เมื่อรวมกับ VTX และตัวรับสัญญาณที่ถูกต้อง, แสดงภาพ HD ขนาดใหญ่โดยไม่กระตุก โปรดทราบว่าจอแสดงผล 2D ใดๆ ที่คุณเลือกจะต้องเชื่อมต่อกับแหล่งพลังงานและติดตั้ง ไม่ว่าจะภายในสถานีฐาน UAV (อธิบายด้านล่าง) หรือโดยการติดตั้งจอภาพ FPV เข้ากับอุปกรณ์ควบคุม
แว่นตา FPV
- แว่นตา 2D
- คุณภาพวิดีโอที่นำเสนอโดยแว่นตา FPV ราคาไม่แพงอาจค่อนข้างต่ำ ดังนั้น หากงบประมาณมีความสำคัญ ให้พิจารณาว่าคุณจะได้รับประสบการณ์ที่ดีขึ้นจากจอภาพ LCD ขนาดใหญ่ขึ้นในราคาเดียวกับแว่นตา FPV...
การติดตามศีรษะ
- การติดตามศีรษะโดยพื้นฐานแล้วเหมือนกับการติดตามการเคลื่อนไหว กล่าวคือ การวัดการวางแนว 3 มิติ / มุมตรงกันข้ามกับ การเคลื่อนที่เชิงเส้น คอมเพล็กซ์เซ็นเซอร์ประกอบด้วยชิป MEMS ของมาตรความเร่ง ไจโรสโคป หรือหน่วยวัดแรงเฉื่อย (IMU)มีการติดตั้งเซ็นเซอร์ (หรือฝังตัว) ในแว่นตา FPV / VR และส่งข้อมูลไปยังไมโครคอนโทรลเลอร์เพื่อตีความข้อมูลเซ็นเซอร์เป็นมุม ซึ่งจะส่งข้อมูลผ่านอุปกรณ์ควบคุม (สำหรับรุ่นไฮเอนด์) หรือผ่านเครื่องส่งสัญญาณไร้สายแยกต่างหาก. ระบบติดตามศีรษะในอุดมคติเข้ากันได้กับเครื่องส่งสัญญาณ ดังนั้นสามารถส่งมุมกับเครื่องส่งสัญญาณได้ในช่อง RC ฟรีสองช่อง
3D / Virtual Reality
- Occulus Rift, Samsung Gear, Morpheus, แว่นตา VR บนสมาร์ทโฟนและ 3D / Head อื่น ๆ อีกมากมาย - จอภาพ VR ที่ติดตั้งไว้สามารถปรับให้ใช้กับโดรนได้ ในขณะที่อุปกรณ์เหล่านี้มักจะสร้างขึ้นสำหรับ 3D PC / เกมคอนโซลหรือเป็นทางเลือกแทนทีวี อุปกรณ์เหล่านี้เข้ากันได้กับ 3D โดยกำเนิด และมักจะมีเซ็นเซอร์ติดตามศีรษะในตัว กลายเป็นที่น่าสนใจมากขึ้นสำหรับชุมชนโดรน FPV
อุปกรณ์อัจฉริยะ
- สามารถใช้สมาร์ทโฟน แท็บเล็ต หรือแล็ปท็อปเพื่อแสดงวิดีโอสดได้ มีแบตเตอรี่ในตัวและตัวอุปกรณ์เองก็มีน้ำหนักเบา ความยากลำบากในการใช้สมาร์ทดีไวซ์อยู่ที่เครื่องรับส่วนใหญ่ไม่ได้ออกแบบมาเพื่อรับสัญญาณวิดีโอจากเครื่องรับวิดีโอแบบไร้สาย (หนึ่งในสองเครื่องเป็นแบบมีสายหรือไร้สาย) แล็ปท็อปหรือแท็บเล็ตที่มีการ์ดวิดีโอในตัวหรือ USB สามารถรับวิดีโอคอมโพสิตปกติได้ ปัจจุบันสมาร์ทโฟนทำงานได้ดีที่สุดกับวิดีโอที่ส่งผ่าน Wi-Fi (จาก Wi-Fi ของกล้องไปยังอแด็ปเตอร์ Wi-Fi) การใช้สัญญาณวิดีโอ Wi-Fi และแอพมือถือของ GoPro เป็นหนึ่งในวิธีที่ง่ายที่สุดในการติดตั้ง FPV แต่ก็ควรสังเกตว่าช่วงสัญญาณ Wi-Fi ของกล้องนั้นจำกัดมาก (10-20 เมตร) เนื่องจากสมาร์ทโฟนเป็นที่แพร่หลายและโดรนก็เป็นที่นิยม ผู้ผลิตจึงออกผลิตภัณฑ์ใหม่ๆ ที่พวกเขาได้รับประโยชน์เป็นประจำ ดังนั้นควรคิดให้รอบคอบก่อนตัดสินใจ
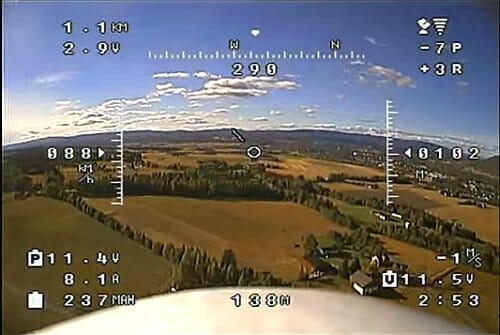
การแสดงผลบนหน้าจอ (OSD)
- การแสดงผลบนหน้าจอ (OSD) ช่วยให้นักบินสามารถดูข้อมูลเซนเซอร์ต่างๆที่ส่งมาจาก อากาศยาน. วิธีที่ง่ายที่สุดวิธีหนึ่งในการแสดงข้อมูลบนหน้าจอคือการใช้กล้องเอาท์พุตแบบแอนะล็อกและวางแผงแสดงผลระหว่างเอาต์พุตของกล้องกับ VTX บอร์ดอแดปเตอร์ OSD มีอินพุตสำหรับเซ็นเซอร์ต่างๆ และจะซ้อนทับข้อมูลบนวิดีโอ ดังนั้นนักบินจะได้รับวิดีโอที่มีข้อมูล telemetry ซ้อนทับอยู่แล้ว



การพิจารณาระยะทาง
- เกี่ยวกับพลังของเครื่องส่งสัญญาณ (อุปกรณ์ควบคุมเช่นเดียวกับวิดีโอ ถ้ามี) โดยทั่วไปแล้ว เครื่องส่ง RC ประกอบด้วยระบบ RF ซึ่งประกอบด้วยจอยสติ๊กและสวิตช์ อุปกรณ์อิเล็กทรอนิกส์และเครื่องส่งสัญญาณ RF และส่วนประกอบ RC ที่มีราคาไม่แพง ระบบนี้มักจะเป็นเครื่องเดียวรุ่นไฮเอนด์มักจะมีโมดูล RF ซึ่งสามารถมองเห็นเป็นกล่องที่อยู่ด้านหลังของอุปกรณ์ควบคุม ในอเมริกาเหนือ ยังเป็นข้อกำหนดทางกฎหมายสำหรับ UAV ที่จะต้องอยู่ในสายตาของนักบิน (สำหรับข้อมูล) อย่างไรก็ตาม กฎหมายมีการเปลี่ยนแปลง ดังนั้นจึงควรปรึกษาก่อนที่จะพยายามดำเนินการแบบไร้คนขับในระยะทางไกล
กำลัง
UAV / Drone
UAV / Drone ของคุณประกอบด้วยชิ้นส่วนต่างๆ มากมาย ซึ่งแต่ละส่วนต้องใช้แรงดันไฟฟ้าเฉพาะ อุปกรณ์อิเล็กทรอนิกส์ทั่วไปที่คุณจะพบได้ในระบบ FPV หรือโดรนพิสัยไกล ได้แก่
- เครื่องยนต์: เครื่องยนต์ UAV ขนาดกลางส่วนใหญ่มักจะทำงานที่ 11.1V หรือ 14.8 วี
- ผู้ควบคุมการบิน, ตัวรับสัญญาณ, GPS: ทางที่ดีควรได้รับพลังงานจาก BEC จาก ESC ตัวใดตัวหนึ่ง
- ตัวรับการติดตามส่วนหัว: มันจะทำงานจากบีอีซีด้วย
- Servo Gimbal: เซอร์โว gimbal สามารถขับเคลื่อนจาก BEC ตัวใดตัวหนึ่งไปยัง ESC และทำงานที่ 5V
- BLDC gimbals: BLDC gimbals บางตัวสามารถเชื่อมต่อกับขั้วต่อการชาร์จแบตเตอรี่หลักในขณะที่บางรุ่นอาจต้องใช้แรงดันไฟฟ้า ตรวจสอบข้อกำหนดของ gimbal ที่คุณกำลังซื้อ
- กล้อง: กล้องที่ใช้สำหรับเที่ยวบิน FPV มักจะทำงานที่ 5V (จาก BEC) หรือ 12V (จากแบตเตอรี่หลัก) กล้องแอ็คชั่นคาเมร่าส่วนใหญ่มีแบตเตอรี่ในตัว
- VTX: ส่วนใหญ่ทำงานที่ 5V และสามารถขับเคลื่อนโดย BEC
- อุปกรณ์อิเล็กทรอนิกส์เพิ่มเติม (ไฟ, ร่มชูชีพ, ฯลฯ): 5V.
ขอแนะนำว่า UAV มีแบตเตอรี่หลักเพียงก้อนเดียว และคุณควรพิจารณาใช้แบตเตอรี่ 11.1V หรือ 14.8V บนโดรนขนาดกลาง หากมี ESC มากกว่าหนึ่งตัวที่ไม่มี BEC คุณจะต้องมีตัวควบคุมแรงดันไฟฟ้า 5V ภายนอกเพื่อจ่ายไฟให้กับอุปกรณ์อิเล็กทรอนิกส์ และตรวจสอบให้แน่ใจว่าสามารถจ่ายกระแสไฟได้เพียงพอสำหรับทุกสิ่ง
นักบิน
ในขณะที่ผู้ใช้โดรนทั่วไปจำเป็นต้องกังวลเกี่ยวกับประสิทธิภาพของอุปกรณ์ควบคุมเท่านั้น นักบินของแท่นขุดเจาะ FPV แบบเต็มอาจต้องแบกแบตเตอรี่ขนาดใหญ่และอุปกรณ์เพิ่มเติมที่หลากหลาย.
- อุปกรณ์ควบคุมแบบพกพา: รีโมทส่วนใหญ่ใช้พลังงานจากแบตเตอรี่ "AA" (4 × AA หรือ 8 × AA) โดยค่าเริ่มต้น แต่ FPV อาจต้องใช้พลังงานแบตเตอรี่ภายนอกเพื่อ อุปกรณ์...
- ตัวส่งสัญญาณ RF เสริม: หากคุณไม่ได้ใช้ตัวส่ง / ตัวรับ RF ที่มาพร้อมกับรีโมทคอนโทรล รุ่นไฮเอนด์มักจะมีเอาต์พุตกำลังซึ่งโมดูลนี้สามารถเชื่อมต่อได้... อีกวิธีหนึ่ง คุณสามารถจ่ายไฟด้วยแบตเตอรี่ภายนอกแบบชาร์จใหม่ได้ซึ่งจ่ายไฟให้กับรีโมทคอนโทรล
- เครื่องรับการติดตามส่วนหัว: โดยปกติหน่วยนี้สามารถขับเคลื่อนจาก 5V
- เครื่องรับวิดีโอ: ส่วนใหญ่ต้องการ 12V แต่มักจะมีช่วงแรงดันไฟฟ้าอินพุตค่อนข้างกว้าง ส่วนใหญ่แล้ว เครื่องรับจะมาพร้อมกับอะแดปเตอร์แปลงไฟที่คุณจะไม่ใช้ภาคสนาม ตรวจสอบช่วงแรงดันไฟฟ้าขาเข้าเพื่อดูว่าคุณสามารถใช้แรงดันไฟฟ้าเดียวกันในการจ่ายไฟให้กับตัวส่งและตัวรับได้หรือไม่ (เช่น 7.4V หรือ 12V)
- การแสดงผลวิดีโอ: อย่าลืมเลือกจอ LCD แบบพกพาที่มีขั้วต่อ "Barrel" เพื่อให้คุณสามารถใช้ก้อนแบตเตอรี่สำหรับอินพุตได้ แว่นตา FPV มักจะมีอินพุต Barrel แต่อย่าลืมตรวจสอบ แรงดันไฟฟ้าที่ใช้บ่อยที่สุดสำหรับ LCD แบบพกพาคือ 12V ซึ่งอาจไม่ดีที่สุดสำหรับอุปกรณ์อื่นๆ
- ตัวติดตามเสาอากาศ: อธิบายไว้ด้านล่าง อุปกรณ์ที่ใช้มอเตอร์นี้มักประกอบด้วยเซอร์โวมอเตอร์ที่ควบคุมด้วยคลื่นวิทยุ ไมโครคอนโทรลเลอร์ และเซ็นเซอร์/อิเล็กทรอนิกส์เพิ่มเติม มีระบบเชิงพาณิชย์น้อยมากสำหรับตลาดโดรนสำหรับงานอดิเรก ดังนั้นหากคุณออกแบบและสร้างระบบดังกล่าว คุณจะต้องพัฒนาการตั้งค่าพลังงาน
สถานีฐาน
ตามที่ระบุไว้ข้างต้น มีอุปกรณ์จำนวนมากที่นักบินจำเป็นต้องพกพาและใช้พลังงาน และอาจมีขนาดใหญ่มาก สถานีฐานมักใช้เพื่อปลดปล่อยผู้ปฏิบัติงานจากภาระ/ความสับสนนี้ และอาจประกอบด้วยอุปกรณ์และช่องต่างๆ มากมายตามรายการด้านล่าง ไม่ยากเลยที่จะจินตนาการว่าผลลัพธ์ของการเตรียมตัวสำหรับเที่ยวบินนั้นขึ้นอยู่กับว่าสถานีฐานประกอบกันได้ดีเพียงใด มัดสายไฟที่เชื่อมต่ออุปกรณ์เหล่านี้ทั้งหมดจะถูกวาง
(200]
สถานีฐานอาจรวมถึง:
- แบตเตอรี่หลัก ที่อาจใช้เพื่อจ่ายไฟให้กับจอ LCD และ / หรือ แว่นตา FPV และอาจเป็นเครื่องรับวิดีโอ
- แบตเตอรี่เสริมสำหรับเครื่องส่งและ / หรือเครื่องรับวิดีโอ
- ตัวยึดจอ LCD และ / หรือตัวยึดแว่นตา FPV
- เมานต์สำหรับเครื่องรับวิดีโอ
- พื้นที่จัดเก็บอุปกรณ์ควบคุม
- ที่ยึดเสาอากาศระยะไกล (หรือตำแหน่งสำหรับเสาอากาศแบบกำหนดทิศทางแบบพกพา)
- ตำแหน่งสำหรับชาร์จสำหรับแบตเตอรี่หลัก
- พื้นที่สำหรับอะไหล่สำหรับโดรน (ใบพัด, มอเตอร์, แบตเตอรี่, องค์ประกอบเฟรม)
"สถานีฐาน" ไม่จำเป็นต้องเป็นผลิตภัณฑ์ที่ผลิตในเชิงพาณิชย์ที่สามารถใช้งานได้ง่ายกับการใช้งานที่ไม่มีคนควบคุม ในทางกลับกัน สามารถออกแบบและสร้างโดยนักบินสมัครเล่นด้วยตัวเอง โดยทั่วไปแล้ว การสร้างสถานีฐานเริ่มต้นด้วยการเลือกกระเป๋าหิ้วที่ทนทาน (เช่น Pelican หรือ Nanuk) แม้ว่ากระเป๋าเป้แบบแข็งก็สามารถนำมาใช้/ดัดแปลงได้เช่นกัน มักใช้ขาตั้งกล้องเพื่อยึดเสาอากาศให้สูงขึ้นจากพื้น
.ตัวติดตามเสาอากาศ
ตัวติดตามเสาอากาศเป็นอุปกรณ์ไฟฟ้าที่ติดตามตำแหน่งของโดรนในสามมิติโดยใช้พิกัด GPS และรู้ตำแหน่งของตัวติดตาม GPS นำเสาอากาศไปยังโดรนด้านข้าง ตัวติดตามเสาอากาศมักใช้ในภารกิจระยะยาวและมีผลิตภัณฑ์เชิงพาณิชย์ไม่มากนักในตลาด เครื่องติดตามประกอบด้วยเครื่องรับ GPS, เข็มทิศ (และบางครั้งก็เป็น IMU), ไมโครคอนโทรลเลอร์, เครื่องรับข้อมูล (สำหรับรับพิกัด GPS ของโดรน), มอเตอร์หมุนหนึ่งตัวและหนึ่งตัว, กรอบกลไก, เสาอากาศแบบมีทิศทางและแบตเตอรี่. เพื่อลดผลกระทบด้านลบของสิ่งกีดขวาง ระบบติดตามเสาอากาศจะยกขึ้นจากพื้นโดยใช้ขาตั้งกล้อง








