เนื้อหา
- โดรน DIY: บทที่ 1 คำศัพท์
- โดรน Do-it-yourself: บทที่ 2. เฟรม
- โดรน Do-it-yourself: บทที่ 3 โรงไฟฟ้า
- โดรน Do-it-yourself: บทที่ 4. ผู้ควบคุมการบิน
- โดรนทำเอง: บทที่ 5. การประกอบ
- โดรนทำเอง: บทที่ 6 การตรวจสอบประสิทธิภาพ
- โดรนทำเอง: บทที่ 7 FPV และระยะทาง
- ทำเสียงขึ้นจมูกด้วยมือของคุณเอง: บทที่ 8 เครื่องบิน
บทนำ
ดังนั้น ก่อนที่คุณจะเริ่มประกอบโดรนของคุณ ขั้นตอนแรกคือการเลือกเฟรม คุณสามารถ ดำเนินการเองได้ หรือใช้โซลูชันสำเร็จรูป (ชุดเฟรม UAV) อย่างที่คุณอาจสังเกตเห็น คุณสามารถใช้เฟรมและการกำหนดค่าประเภทต่างๆ เพื่อสร้าง UAV แบบหลายใบพัดได้ ดังนั้น ในส่วนนี้ เราจะพิจารณาประเภทเฟรมทั่วไปหรือพื้นฐาน วัสดุในการดำเนินการ ตลอดจนปัญหาที่เกี่ยวข้องกับการออกแบบ
ประเภทของเฟรม UAV
Tricopter
- คำอธิบาย: UAV ซึ่งมีสามคานซึ่งแต่ละอันเชื่อมต่อกับ มอเตอร์ ส่วนหน้าของไตรคอปเตอร์ถือเป็นด้านข้างของทางแยกของคานสองท่อน (Y3) มุมระหว่างคานอาจแตกต่างกัน แต่โดยทั่วไปจะอยู่ที่ 120 ° เพื่อต่อต้านผลกระทบจากการหมุนวนของจำนวนโรเตอร์ที่ไม่สม่ำเสมอ เช่นเดียวกับการเปลี่ยนมุมบังคับเลี้ยว มอเตอร์ด้านหลังจะต้องสามารถหมุนได้ (ทำได้โดยการติดตั้งเซอร์โวมอเตอร์ RC แบบธรรมดา) หากต้องการแยกการใช้เซอร์โวออกจากชุดประกอบ ให้ใช้ การออกแบบ Y4
- ข้อดี: ลักษณะที่ผิดปกติของโดรน มีคุณสมบัติการบินที่ดีที่สุดเมื่อบินไปในทิศทางไปข้างหน้า ราคา (ต้องใช้มอเตอร์และ ESC น้อยลงในการสร้าง)
- ข้อเสีย: การออกแบบที่ไม่สมมาตร ต้องใช้เซอร์โว ความยากลำบากในการทำงานของลำแสงด้านหลัง (เนื่องจากต้องติดตั้งเซอร์โวตามแนวแกน) ตัวควบคุมการบินบางตัวไม่สนับสนุนการกำหนดค่านี้

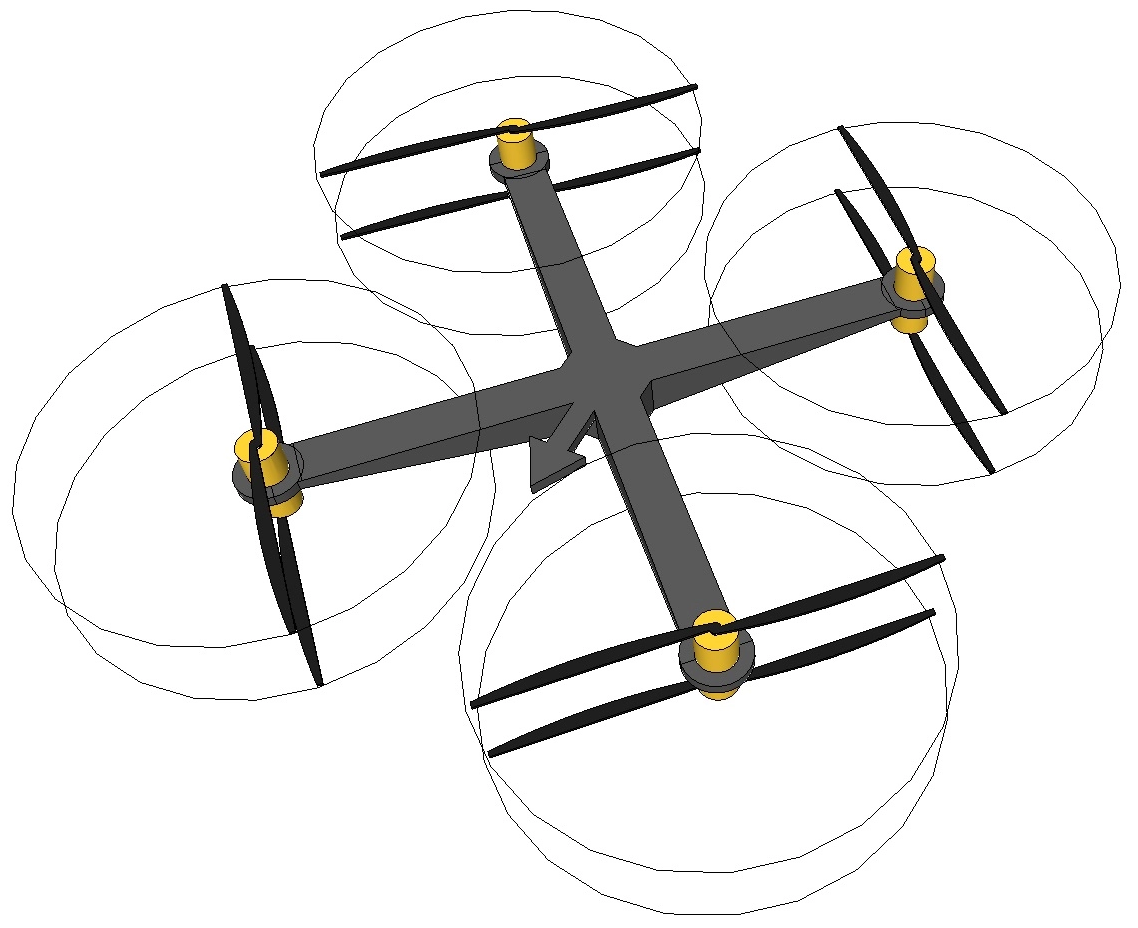
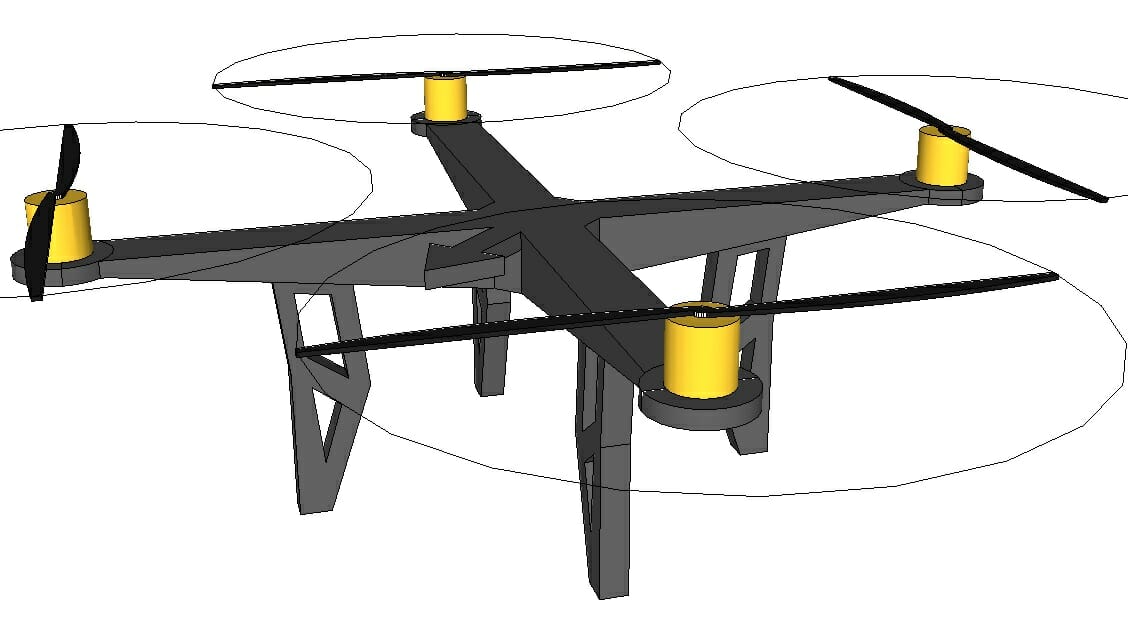
โดรน
- คำอธิบาย: โดรน "Quadcopter" ที่มีสี่คาน ซึ่งแต่ละอันเชื่อมต่อกับมอเตอร์ สำหรับ " X configurationconfiguration
- ข้อดี: การออกแบบหลายใบพัดที่พบบ่อยที่สุด การออกแบบที่เรียบง่ายและหลากหลายที่สุด ในการกำหนดค่ามาตรฐาน แขน/มอเตอร์มีความสมมาตรประมาณสองแกน อุปกรณ์ควบคุมการบินทั้งหมดที่มีในท้องตลาดสามารถทำงานร่วมกับชุดประกอบหลายใบพัดนี้ได้
- ข้อเสีย: ขาดความซ้ำซ้อน (หากระบบล้มเหลวโดยเฉพาะอย่างยิ่งในองค์ประกอบของโรงไฟฟ้าเสียงหึ่งๆจะตกลงมา)

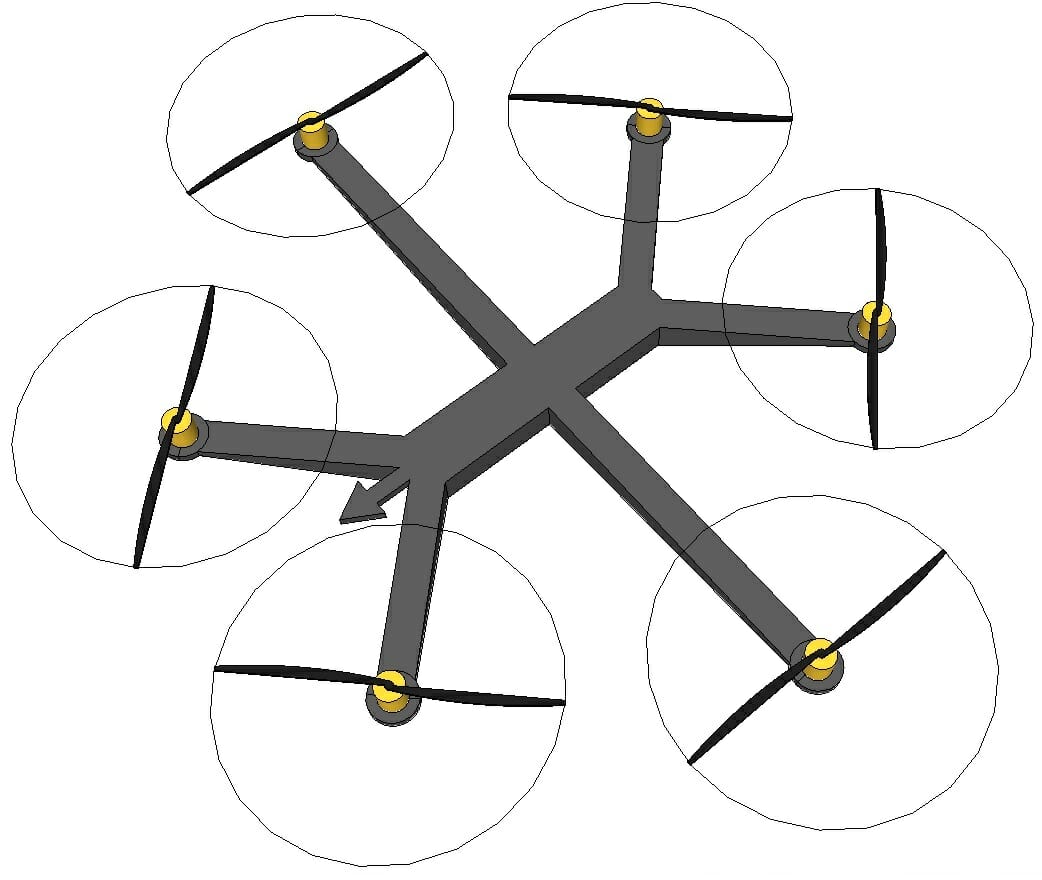
เฮกซาคอปเตอร์
- คำอธิบาย: เฮกซาคอปเตอร์มีหกคาน แต่ละอัน ซึ่งเชื่อมต่อกับมอเตอร์ส่วนหน้าของเฮกซาคอปเตอร์ถือเป็นด้านข้างของทางแยกของคานทั้งสอง แต่คานตามยาวก็ถือเป็นส่วนหน้าได้เช่นกัน
- ข้อดี: หากจำเป็น การออกแบบเฮกซาคอปเตอร์ช่วยให้สามารถเพิ่มคานและมอเตอร์เพิ่มเติมสองลำได้ง่าย ซึ่งจะเพิ่มแรงขับโดยรวม อันเป็นผลมาจากการที่โดรนสามารถยกน้ำหนักบรรทุกได้มากขึ้น. ในกรณีที่มอเตอร์ตัวใดตัวหนึ่งเกิดขัดข้อง โดรนจะสามารถลงจอดอย่างนุ่มนวลและไม่ชนได้ การออกแบบเฟรมแบบโมดูลาร์ ตัวควบคุมการบินเกือบทั้งหมดรองรับการกำหนดค่านี้
- ข้อเสีย: การก่อสร้างขนาดใหญ่และมีราคาแพง มอเตอร์และชิ้นส่วนเพิ่มเติมจะเพิ่มน้ำหนักของคอปเตอร์ ดังนั้น เพื่อให้ได้ระยะเวลาการบินเท่ากับ quadrocopter จำเป็นต้องติดตั้งแบตเตอรี่ที่มีความจุมากขึ้น
Y6
- คำอธิบาย: การก่อสร้าง Y6 เป็นประเภทของเฮกซาคอปเตอร์ด้วย ที่ฐานไม่ใช่หกคาน แต่มีสามคานซึ่งแต่ละอันเชื่อมต่อกับมอเตอร์แบบโคแอกเชียลคู่หนึ่ง (มีทั้งหมด 6 มอเตอร์) ควรสังเกตว่าใบพัดล่างยื่นลงด้านล่าง
- ข้อดี: ส่วนประกอบน้อยกว่าเมื่อเทียบกับเฮกซาคอปเตอร์ ยกน้ำหนักบรรทุกมากขึ้นเมื่อเทียบกับ quadcopter เมื่อใช้สกรูหมุนทวน จะไม่รวมเอฟเฟกต์ไจโรสโคปิก เช่นเดียวกับใน Y3
- ข้อเสีย: มีราคาแพงกว่าเมื่อเทียบกับ quadrocopter เนื่องจากการใช้ชิ้นส่วนเพิ่มเติมที่เทียบเท่ากับต้นทุนของชิ้นส่วน hexacopter มอเตอร์และชิ้นส่วนเพิ่มเติมจะเพิ่มน้ำหนักของคอปเตอร์ ซึ่งหมายความว่าเพื่อให้ได้เวลาบินเท่ากันกับควอดคอปเตอร์ คุณจะต้องใช้แบตเตอรี่ที่ใหญ่ขึ้น ในทางปฏิบัติ แรงขับที่ได้จาก Y6 นั้นต่ำกว่าเฮกซาคอปเตอร์ทั่วไปเล็กน้อย อาจเป็นเพราะโรเตอร์ด้านล่างส่งผลต่อแรงขับของโรเตอร์ด้านบน ตัวควบคุมการบินบางตัวไม่สนับสนุนการกำหนดค่านี้

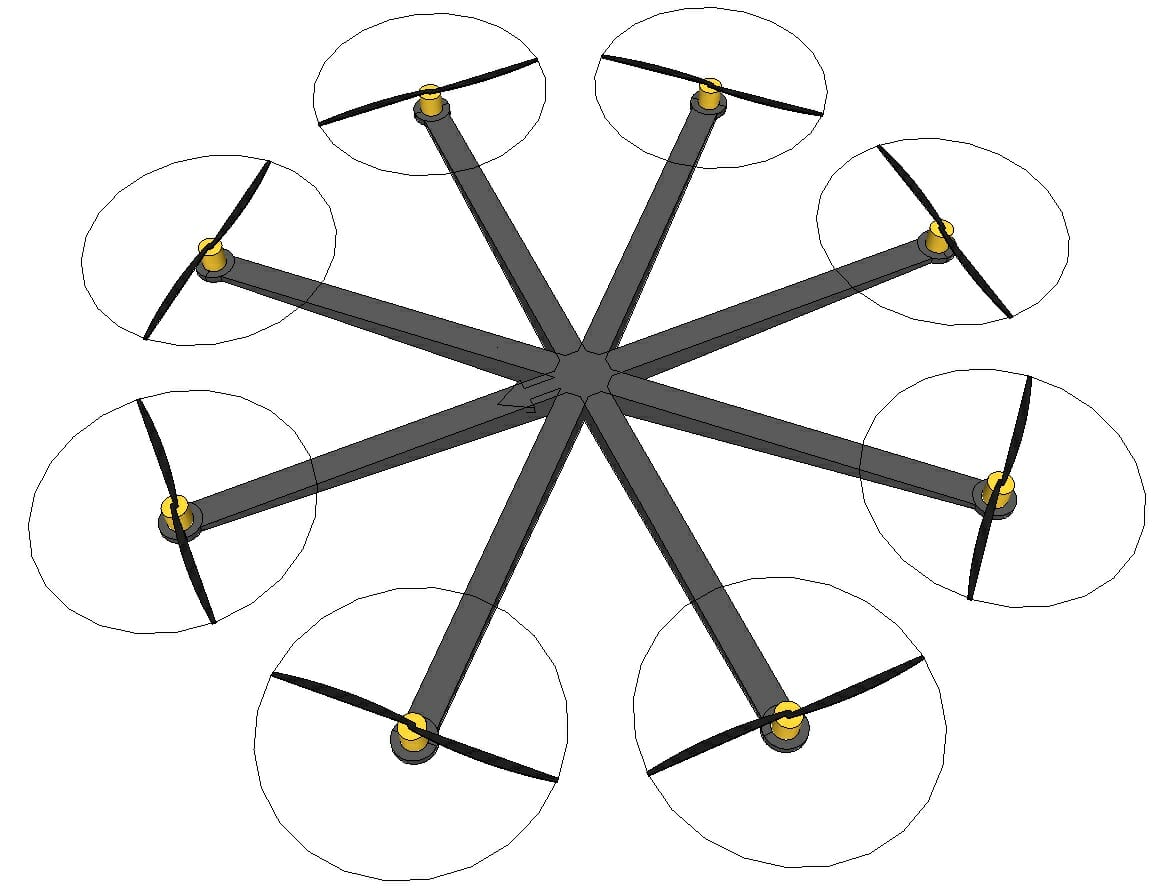
Octocopter
- คำอธิบาย: Octocopter มีแปดคานซึ่งแต่ละอัน เชื่อมต่อกับมอเตอร์ ส่วนหน้าของเฮกซาคอปเตอร์ถือเป็นด้านข้างของทางแยกของสองคาน
- ข้อดี: มอเตอร์มากขึ้น = แรงขับที่มากขึ้น ดังนั้นจึงมีความซ้ำซ้อนเพิ่มขึ้น ทำให้โดรนสามารถนำทางได้อย่างมั่นใจด้วยกล้อง DSLR ที่มีน้ำหนักมากและมีราคาแพง
- ข้อเสีย: มอเตอร์มากขึ้น = ราคาที่สูงขึ้นและแบตเตอรี่ขนาดใหญ่ขึ้น เนื่องจากมีค่าใช้จ่ายสูงจึงมีความเกี่ยวข้องเฉพาะกับทรงกลมแบบมืออาชีพเท่านั้น
X8
- คำอธิบาย: การออกแบบ X8 ยังคงเป็นอ็อกโตคอปเตอร์ ไม่ใช่แค่แปด แต่มีสี่คานซึ่งแต่ละอันเชื่อมต่อกับมอเตอร์ที่ติดตั้งโคแอกเชียล (รวม 8 มอเตอร์)
- ข้อดี: เครื่องยนต์มากขึ้น = แรงขับมากขึ้น ดังนั้นจึงเพิ่มความซ้ำซ้อน มีแนวโน้มที่จะลงจอดอย่างนุ่มนวลในกรณีที่มอเตอร์ขัดข้อง
- ข้อเสีย: มอเตอร์มากขึ้น = ราคาที่สูงขึ้นและแบตเตอรี่ขนาดใหญ่ขึ้น เนื่องจากมีค่าใช้จ่ายสูง จึงมีความเกี่ยวข้องเฉพาะสำหรับกิจกรรมระดับมืออาชีพเท่านั้น
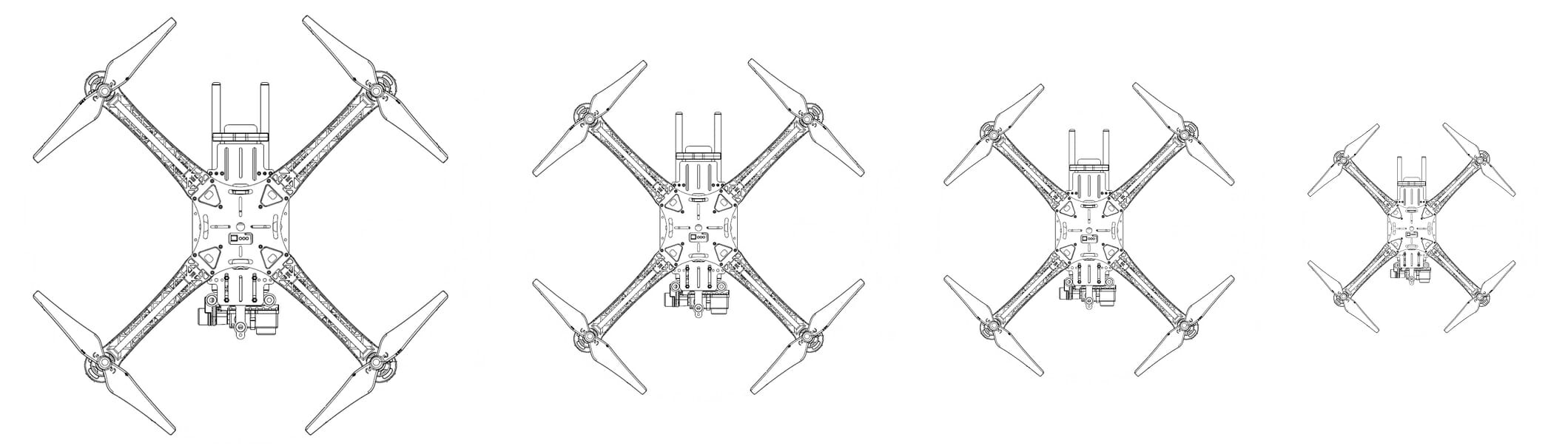
ขนาด UAV
UAVs มีหลายขนาดตั้งแต่นาโนซึ่งมีขนาดเล็กกว่าฝ่ามือ จากมือของคุณไปยังมือที่ใหญ่กว่า ซึ่งสามารถขนย้ายได้เฉพาะท้ายรถบรรทุกเท่านั้น สำหรับผู้ใช้ส่วนใหญ่ที่เพิ่งเริ่มต้นกับงานอดิเรกของโดรน ช่วงขนาดที่เหมาะสมที่สุดซึ่งให้ความคล่องตัวและความคุ้มค่าสูงสุดอยู่ระหว่าง 350 มม. ถึง 700 มม. ขนาดเฟรมคือเส้นผ่านศูนย์กลางของวงกลมที่ใหญ่ที่สุดที่ตัดผ่านมอเตอร์แต่ละตัว ชิ้นส่วนสำหรับ UAV ขนาดนี้มีราคาที่หลากหลายและมีผลิตภัณฑ์ให้เลือกมากมาย
วัสดุของ UAV / การก่อสร้าง
ด้านล่างเป็นวัสดุที่ใช้กันทั่วไปในการผลิตเฟรมสำหรับโดรนหลายใบพัด ตามลำดับ, รายการไม่สมบูรณ์. ตามหลักการแล้ว เฟรมควรแข็งและมีการสั่นสะเทือนน้อยที่สุด
ยางโฟม (โฟม) - เนื่องจากวัสดุเดียวสำหรับการผลิตเฟรม UAV นั้นไม่ค่อยได้ใช้และตามกฎแล้วเมื่อใช้ร่วมกับโครงแข็งหรือโครงสร้างเสริม. สามารถใช้เพื่อวัตถุประสงค์เชิงกลยุทธ์ได้เช่นกัน เป็นตัวป้องกันโรเตอร์ (ใบพัด) แชสซี มักจะทำหน้าที่เป็นตัวกันกระแทก ยางโฟมสามารถมีได้หลายประเภทตั้งแต่แบบอ่อนไปจนถึงแบบแข็ง

ไม้ - หากความสำคัญคือความถูกของโครงสร้างไม้ก็เป็นตัวเลือกที่ยอดเยี่ยมที่จะลด เวลาในการประกอบและการผลิตชิ้นส่วนอะไหล่ ชิ้นส่วน ไม้มีความแข็งเพียงพอและเป็นวัสดุที่ผ่านการทดสอบตามเวลา สิ่งสำคัญคือต้องใช้ไม้ตรงอย่างสมบูรณ์แบบในการผลิตโครง (โดยไม่ดัดและเสียรูป)

พลาสติก - มีให้สำหรับผู้ใช้ส่วนใหญ่ในรูปแบบแผ่นพลาสติกเท่านั้น มีแนวโน้มที่จะโค้งงอและไม่เหมาะ เหมาะสำหรับทำโรลเคจหรือโครงเครื่อง หากคุณกำลังพิจารณาการพิมพ์ 3 มิติ คุณควรพิจารณาช่วงเวลาการผลิต (การซื้อชุดกรอบ UAV อาจง่ายกว่า) การพิมพ์ 3 มิติของชิ้นส่วนนั้นทำงานได้ดีสำหรับควอดคอปเตอร์ขนาดเล็ก

อลูมิเนียม - มาถึงผู้บริโภคในรูปทรงและขนาดต่างๆ คุณสามารถใช้แผ่นอะลูมิเนียมสำหรับตัวกล้อง หรืออะลูมิเนียมอัดขึ้นรูปสำหรับคานโดรน อลูมิเนียมไม่เบาเท่าคาร์บอนไฟเบอร์หรือ G10 แต่ราคาและความทนทานเป็นข้อได้เปรียบหลักของวัสดุ แทนที่จะหักหรือแตก อะลูมิเนียมมักจะโค้งงอ ในการทำงานกับวัสดุต้องใช้เลื่อยและสว่านเท่านั้น
G10 (ใยแก้วชนิดหนึ่ง) - แม้ว่าลักษณะและคุณสมบัติพื้นฐานเกือบจะเหมือนกันกับคาร์บอน (คาร์บอนไฟเบอร์) เป็นวัสดุที่มีราคาไม่แพงส่วนใหญ่จะมีอยู่ในรูปแบบแผ่นงานและใช้เพื่อรับรู้แผ่นเฟรมด้านบนและด้านล่าง ไม่เหมือนคาร์บอนไฟเบอร์ G10 ไม่ปิดกั้นคลื่น RF
PCB (แผงวงจรพิมพ์ - แผ่นอิเล็กทริก) - อันที่จริงอะนาล็อกของไฟเบอร์กลาส แต่ไม่เหมือนอย่างหลัง แบนอยู่เสมอ บางครั้งใช้เป็นเพลทเฟรมด้านบนและด้านล่างเพื่อลดจำนวนชิ้นส่วนที่ใช้ (เช่น แผงจ่ายไฟมักจะติดตั้งไว้ที่แผงด้านล่าง) เฟรม นาโน
คาร์บอนไฟเบอร์ เป็นวัสดุที่เป็นที่ต้องการมากที่สุดเนื่องจากมีน้ำหนักเบาและมีความแข็งแรงสูง กระบวนการผลิตยังคงเป็นแบบ manual เท่านั้น ตามกฎแล้วจะมีการผลิตรูปแบบง่าย ๆ เช่นแผ่นเรียบส่วนประกอบท่อ การดำเนินการของรูปทรงสามมิติที่ซับซ้อนนั้นดำเนินการตามคำสั่ง
ข้อควรพิจารณาเพิ่มเติม
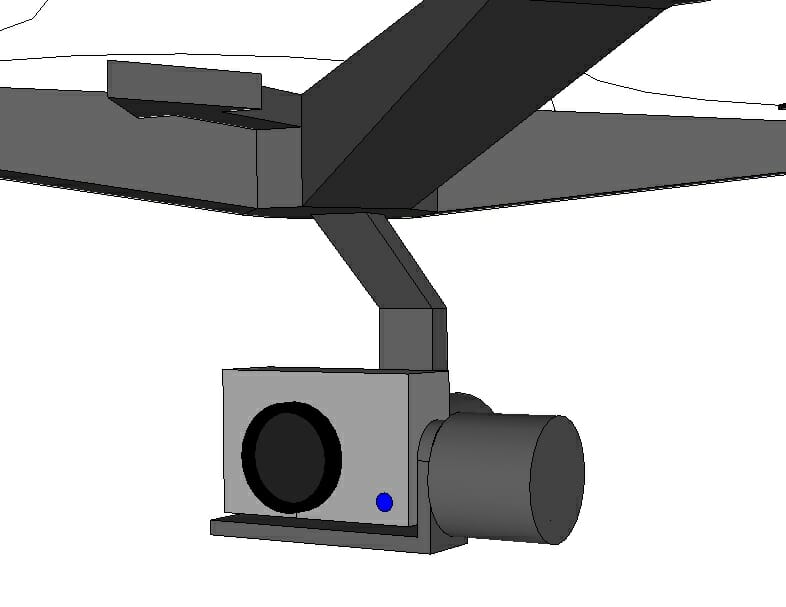
- Gimbal - ส่วนใหญ่มักใช้เพื่อทำให้กล้องเสถียร (FPV / การถ่ายภาพทางอากาศ). ตามกฎแล้วจะติดตั้งใต้เฟรมตามจุดศูนย์ถ่วงของ UAV สามารถติดเข้ากับโครงได้โดยตรงหรือโดยใช้ราง สำหรับการป้องกันภาพสั่นไหว ขอแนะนำให้ใช้แกนกันสั่นสองหรือสามแกน ต้องเพิ่มความยาวของขาลงจอด
- น้ำหนักบรรทุก (ขนส่ง) - ในทรงกลมมือสมัครเล่นเป็นสิ่งที่หรูหราดังนั้นอย่างไร น้ำหนักที่เพิ่มขึ้นใดๆ ไม่เพียงแต่ช่วยลดเวลาบิน แต่ยังนำไปสู่การปฏิเสธการใช้องค์ประกอบเพิ่มเติมที่สามารถเพิ่มฟังก์ชันหลักให้กับโดรนได้ เมื่อออกแบบ ควรเข้าใจว่ากรณีการขนส่งควรเบาที่สุดเท่าที่จะเป็นไปได้และในขณะเดียวกันก็แข็งแรง และตัวสินค้าควรยึดอย่างแน่นหนา ไม่รวมการเคลื่อนไหวใดๆ ในเที่ยวบิน

- Landing feet - แม้ว่า UAV บางตัวจะลงจอดบนเฟรมโดยตรง (มักจะเป็น ไม่รวมเพื่อลดน้ำหนัก) การใช้ตัวรองรับการลงจอดในการออกแบบจะทำให้ช่องว่างระหว่างส่วนล่างของ UAV กับพื้นผิวที่ไม่เรียบและในกรณีที่ลงจอดอย่างหนักพวกเขาจะเพิ่มโอกาสในการประหยัด องค์ประกอบที่สำคัญของโดรน เช่น กล้อง ช่วงล่าง แบตเตอรี่ และเฟรม
- การติดตั้ง - แม้ว่าการออกแบบและการผลิตโดรนจะง่ายกว่ามาก เฮลิคอปเตอร์ทั่วไป ควรพิจารณาตำแหน่งของแต่ละองค์ประกอบในช่วงเริ่มต้นของกระบวนการออกแบบ
แนวทางการติดตั้งทั่วไป:
- เมื่อสร้างเฟรมตั้งแต่เริ่มต้น สิ่งสำคัญคือต้องแน่ใจว่าตำแหน่งที่แน่นอนของรูยึดสี่รูผ่านนั้น มอเตอร์ติดอยู่กับเฟรม...
- มอเตอร์ส่วนใหญ่สำหรับเฟรมตั้งแต่ 400 มม. ถึง 600 มม. มีรูปแบบรูสำหรับยึดเหมือนกัน ซึ่งทำให้สามารถใช้เฟรมจากผู้ผลิตรายหนึ่งและมอเตอร์จากผู้ผลิตรายอื่น
- ตำแหน่งของส่วนประกอบเพิ่มเติมทั้งหมดควรมีความสมมาตรประมาณหนึ่งแกน ซึ่งภายหลังจะช่วยอำนวยความสะดวกในการค้นหาและปรับศูนย์กลางมวลของโดรน
- ตามหลักการแล้ว ผู้ควบคุมการบินควรอยู่ในศูนย์กลางของวงกลม (และในจุดศูนย์กลางมวล) ที่เชื่อมต่อมอเตอร์ทั้งหมดเข้าด้วยกัน
- ตัวควบคุมการบินมักจะติดกับเฟรมโดยใช้สตรัท แดมเปอร์ยาง หรือเทปสองด้าน
- ผู้ผลิตหลายรายใช้รูปแบบรูยึดเดียวกันสำหรับตัวควบคุมการบิน (เช่น 35 มม. หรือ 45 มม. สี่เหลี่ยมจัตุรัส) แต่ไม่มี "มาตรฐานอุตสาหกรรม" ในปัจจุบัน
- แบตเตอรี่มีน้ำหนักเพียงพอ และหากจุดศูนย์กลางมวลของชิ้นส่วนขยับเล็กน้อย คุณสามารถปรับแบตเตอรี่ได้โดยการขยับแบตเตอรี่เล็กน้อย
- ตรวจสอบให้แน่ใจว่าที่ใส่แบตเตอรี่เล่นได้เล็กน้อย แต่ในขณะเดียวกันก็ช่วยให้แน่ใจว่าแบตเตอรี่ถูกยึดไว้อย่างแน่นหนา
- สายรัดเวลโครมักใช้เพื่อยึดแบตเตอรี่ อย่างไรก็ตาม ควรติดเทปกาวสองหน้าระหว่างแบตเตอรี่กับโครง

แนวทางปฏิบัติ
ขั้นตอนที่ 1: ดูว่าวัสดุและเครื่องมือสำหรับการประมวลผลมีอะไรบ้างในการกำจัดของคุณ.
- หากความสามารถของคุณไม่เพียงพอสำหรับการติดตั้งเฟรมแบบกำหนดเองหรือคุณต้องการเฟรมแบบมืออาชีพ พิจารณาซื้อชุดเฟรม UAV
- แม้ว่าเฟรมจะถูกสร้างขึ้นโดยใช้เครื่องมือและวัสดุพื้นฐานที่ถูกต้อง แต่ก็ยังมีจุดอ่อนของโครงสร้างที่ทำให้เกิดการสั่นสะเทือนหรือการเคลื่อนที่มากเกินไป กระบวนการผลิตต้องใช้สายตาและประสบการณ์ที่เฉียบแหลม
- เมื่อสร้างเฟรมด้วยตัวเอง ให้คิดถึงการยึดองค์ประกอบที่จำเป็นทั้งหมดของโดรน มอเตอร์ อิเล็กทรอนิกส์ ฯลฯ
ขั้นตอนที่ 2: ระบุชิ้นส่วน (อุปกรณ์เสริม) เพิ่มเติมที่คุณวางแผนจะรวมไว้ในชุดประกอบ
- สามารถเป็น gimbal หนึ่ง, สองหรือสามแกนสำหรับกล้อง, ร่มชูชีพ, มินิคอมพิวเตอร์ออนบอร์ด, น้ำหนักบรรทุก, อุปกรณ์อิเล็กทรอนิกส์ระยะไกล (ตามกฎแล้วจะทำให้การประกอบหนักขึ้นและใหญ่ขึ้น) อุปกรณ์ลอยน้ำ ฯลฯ
- รายการผลลัพธ์ของชิ้นส่วนเพิ่มเติม / เสริมจะให้แนวคิดเกี่ยวกับขนาดของโดรนและคำนวณมวลรวม
ขั้นตอนที่ 3: คิดเกี่ยวกับขนาดเฟรมโดยประมาณ
- เฟรมขนาดใหญ่ไม่จำเป็นต้องมีศักยภาพที่ยอดเยี่ยมสำหรับโดรน และเฟรมที่เล็กกว่าอาจไม่ทำให้การประกอบราคาถูกลง
- แนะนำให้ใช้โดรนที่สร้างขึ้นบนเฟรมขนาด 400 - 600 มม. สำหรับผู้เริ่มต้น
.ขั้นตอนที่ 4: ออกแบบ สร้างและทดสอบเฟรม
- หากคุณซื้อชุดเฟรม UAV คุณก็ไม่มีอะไรต้องกังวลในแง่ของความแข็งแกร่ง ความแข็งแกร่ง และโครงสร้าง
- หากคุณตัดสินใจในการออกแบบและสร้างเฟรมตั้งแต่เริ่มต้น (200] การตรวจสอบความแข็งแรง น้ำหนัก และตรวจสอบให้แน่ใจว่าโครงสร้างสามารถทนต่อแรงสั่นสะเทือน (การดัดงอน้อยที่สุด) เป็นสิ่งสำคัญ
- พิจารณาใช้ซอฟต์แวร์สร้างแบบจำลองเฉพาะทาง (หลายๆ ซอฟต์แวร์ไม่เสียค่าใช้จ่าย เช่น Google Sketchup) เพื่อออกแบบเฟรมและตรวจสอบว่าขนาดถูกต้อง
ตอนนี้คุณมีกรอบแล้ว และคุณสามารถไปยังบทเรียนต่อไปได้







