ควอดคอปเตอร์คืออะไร?
ควอดคอปเตอร์เป็นมัลติคอปเตอร์ชนิดหนึ่ง มัลติคอปเตอร์เป็นเครื่องบินหลายเครื่องยนต์หรือหลายโรเตอร์ (เฮลิคอปเตอร์) ซึ่งโรเตอร์หลักจะหมุนในแนวทแยงมุมในทิศทางตรงกันข้าม มัลติคอปเตอร์แตกต่างกันไปตามจำนวนมอเตอร์ (หรือตามจำนวนโรเตอร์) ปัจจุบันมีการใช้มัลติคอปเตอร์ที่มีโรเตอร์สามตัวขึ้นไป
รูปแบบที่พบบ่อยที่สุดคือ: 4/6/8 โรเตอร์ เครื่องมือที่มีสามใบพัดโรเตอร์เรียกว่าไตรคอปเตอร์ มีสี่ - quadcopter; มีหก - เฮกซาคอปเตอร์และแปดโรเตอร์ - ออคโตคอปเตอร์ การใช้แต่ละแบบแผนส่วนใหญ่จะกำหนดพารามิเตอร์เช่น - มวลของน้ำหนักบรรทุกหรือง่ายกว่านั้นคือน้ำหนักที่เครื่องมัลติคอปเตอร์สามารถรับได้
ตัวอย่างโซลูชั่นมัลติโรเตอร์ที่ทันสมัย
โซลูชั่นมัลติโรเตอร์ที่ทันสมัยจากช่องราคาที่แตกต่างกัน:




จากประวัติศาสตร์
ทุกอย่างเริ่มต้นในปี 1922 โดยนักออกแบบเครื่องบินชาวรัสเซีย-อเมริกัน Georgy Aleksandrovich Botezat ผู้คิดค้น quadcopter ที่ใช้งานได้เป็นครั้งแรก เครื่องมือของเขาไม่เพียงแต่จะลอยขึ้นจากพื้นได้เท่านั้น แต่ยังสามารถลอยขึ้นไปในอากาศได้อีกระยะหนึ่ง ในเวลานั้นอุปกรณ์ดังกล่าวมีข้อเสียเปรียบที่สำคัญประการหนึ่งคือหลักการทำงาน

จากโรเตอร์สี่ตัว มีเพียงตัวเดียวเท่านั้นที่เป็นแกนนำ (การหมุนถูกกำหนดโดยเครื่องยนต์สันดาปภายใน) เช่น แรงบิดจากการส่งสัญญาณที่ซับซ้อนถูกส่งโดยมอเตอร์ตัวหนึ่งไปยังโรเตอร์หลักอีก 3 ตัว มันไม่ได้มาเพื่อการพัฒนาแบบอนุกรม และสิ่งประดิษฐ์เช่น "Tail rotor" และ "Swashplate" ถูกบังคับให้ละทิ้งการพัฒนาเครื่องบินหลายใบพัดโดยสมบูรณ์ ต่อมา เฮลิคอปเตอร์เครื่องแรกของโลกได้ถูกสร้างขึ้น
ด้วยการถือกำเนิดของศตวรรษที่ 21 เครื่องบินหลายใบพัดได้เข้ามาในชีวิตเราในฐานะยานพาหนะทางอากาศหรือโดรนไร้คนขับ
ส่วนประกอบหลักของมัลติคอปเตอร์
ในทางเทคนิค เมื่อประมาณ 5 ปีที่แล้ว ส่วนประกอบหลักสามประการของมัลติคอปเตอร์ (โดรน) ปรากฏขึ้น:
- แบตเตอรี่ - ลิเธียมโพลิเมอร์ (LiPo), ลิเธียมไอออน (Li-Ion) น้อยกว่า
- มอเตอร์ไร้แปรงถ่าน หรือมอเตอร์แรร์เอิร์ธแบบแปรง
- รีโมทคอนโทรล (แผงควบคุม / ฮาร์ดแวร์ / เครื่องส่ง)

หลักการทำงาน
หลักการทำงานของมัลติคอปเตอร์สมัยใหม่คือ เรียบง่าย. ขึ้นอยู่กับรูปแบบการใช้งาน (3/4/6/8-rotor) โรเตอร์แต่ละตัวขับเคลื่อนด้วยมอเตอร์ไฟฟ้า (มอเตอร์ไฟฟ้า) ครึ่งหนึ่งของมอเตอร์หมุนสกรูตามเข็มนาฬิกา และอีกครึ่งหนึ่งหมุนทวนเข็มนาฬิกา ด้วยวิธีนี้ ในการควบคุมมัลติคอปเตอร์ จึงไม่จำเป็นต้องมีการใช้โรเตอร์หางและสวอชเพลทที่ซับซ้อนในการออกแบบโดรน
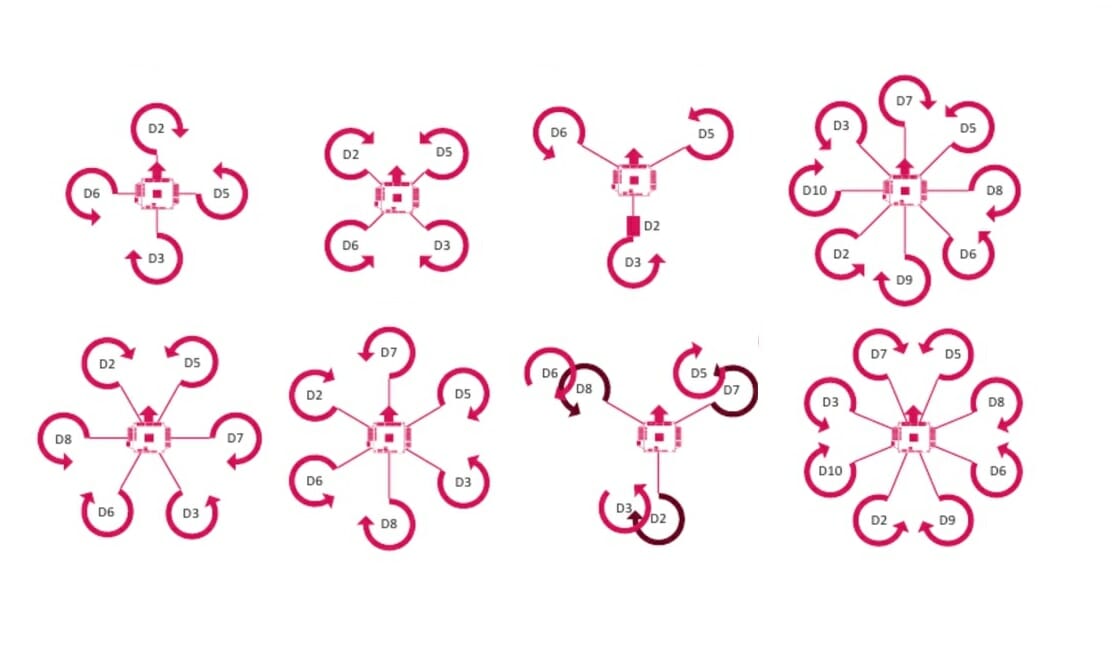
* ลำดับของทิศทางการหมุนของโรเตอร์มัลติคอปเตอร์
ตัวอย่างการควบคุมการบิน:
- การเพิ่มรอบต่อนาทีบนโรเตอร์ทั้งหมด - การยก
- ลดความเร็วของโรเตอร์ทั้งหมด - ลดลง
- การเพิ่มการหมุนของสกรูครึ่งหนึ่งและลดการหมุนของอีกครึ่งหนึ่งจะทำให้การเคลื่อนที่ไปด้านข้าง
- การเพิ่ม RPM สำหรับใบพัดตามเข็มนาฬิกาและลด RPM สำหรับใบพัดทวนเข็มนาฬิกาจะทำให้โดรนหมุน
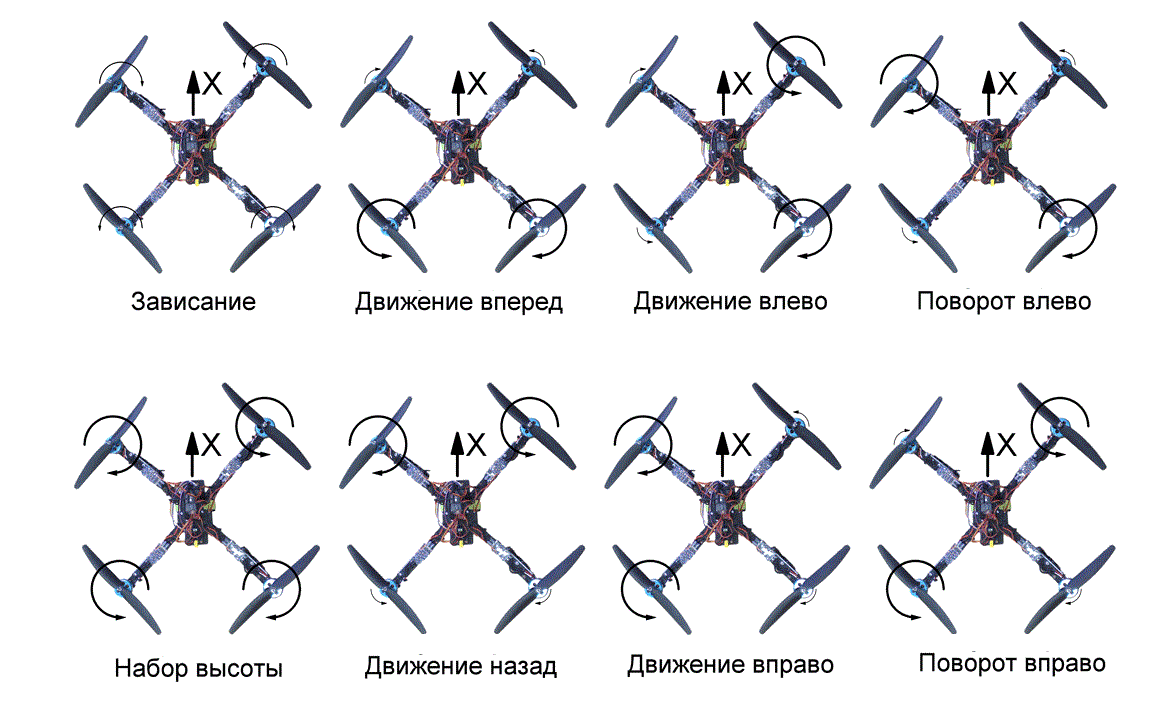
* รูปแบบการควบคุมการบินสำหรับการหมุนของโรเตอร์
มอเตอร์
ปัจจุบันมีการใช้มอเตอร์ไฟฟ้าสองประเภทกับเครื่องมัลติคอปเตอร์สมัยใหม่ (โดรน) - แบบมีแปรงและไม่มีแปรง โดรนไร้แปรงถ่านนั้นติดตั้งโดรนราคาแพงและเป็นมืออาชีพเป็นหลัก เฉพาะตัวเลือกงบประมาณและของเล่นเท่านั้นที่ติดตั้งมอเตอร์สะสม รายละเอียดเพิ่มเติมเกี่ยวกับความแตกต่างสามารถพบได้ ที่นี่

การควบคุม
มัลติคอปเตอร์ถูกควบคุมโดยรีโมตคอนโทรล (หรือที่เรียกว่ารีโมตคอนโทรล อุปกรณ์ เครื่องส่ง ) ผ่านคลื่นวิทยุขาออก (โดยปกติ ที่ความถี่ 2.4GHz หรือ 5.8GHz )
เพื่อให้ multicopter ตอบสนองต่อคำขอของแผงควบคุม โดรนได้รับการติดตั้งระบบอิเล็กทรอนิกส์ที่ซับซ้อนทั้งหมด:
- ไมโครโปรเซสเซอร์ ( ตัวควบคุมการบิน
- Gyroscope - รับผิดชอบพฤติกรรมที่มั่นคงของเสียงพึมพำระหว่างการบิน (ตามกฎแล้วจะให้ความเสถียรตามแกน 6 ทิศทาง)
- มาตรความเร่ง - เซ็นเซอร์นี้ช่วยให้โปรเซสเซอร์จัดตำแหน่งเครื่องบินในตำแหน่งแนวนอนที่สัมพันธ์กับพื้น
- เซ็นเซอร์ความกดอากาศ (บารอมิเตอร์) - ให้โดรนลอยตัวที่ระดับความสูงที่นักบินเลือกไว้
- โซนาร์ (เซ็นเซอร์อัลตราโซนิก) - ให้การลงจอดอัตโนมัติและรักษาความสูงเล็กน้อย (1.5 - 3.5 เมตร) นอกจากนี้ยังสามารถใช้ในการบินรอบสิ่งกีดขวาง
- โมดูล GPS - ระบุตำแหน่งทางภูมิศาสตร์ของโดรนโดยใช้ข้อมูลที่ได้รับจากระบบดาวเทียม เนื่องจากการมีอยู่ของมัน ฟังก์ชั่นของการบินตามจุดจึงเกิดขึ้น กลับไปที่ไซต์บินในกรณีที่ขาดการติดต่อหรือประจุแบตเตอรี่ต่ำและยังช่วยให้คุณอ่านค่าเที่ยวบินได้ทั้งในเวลาที่บินและหลัง.
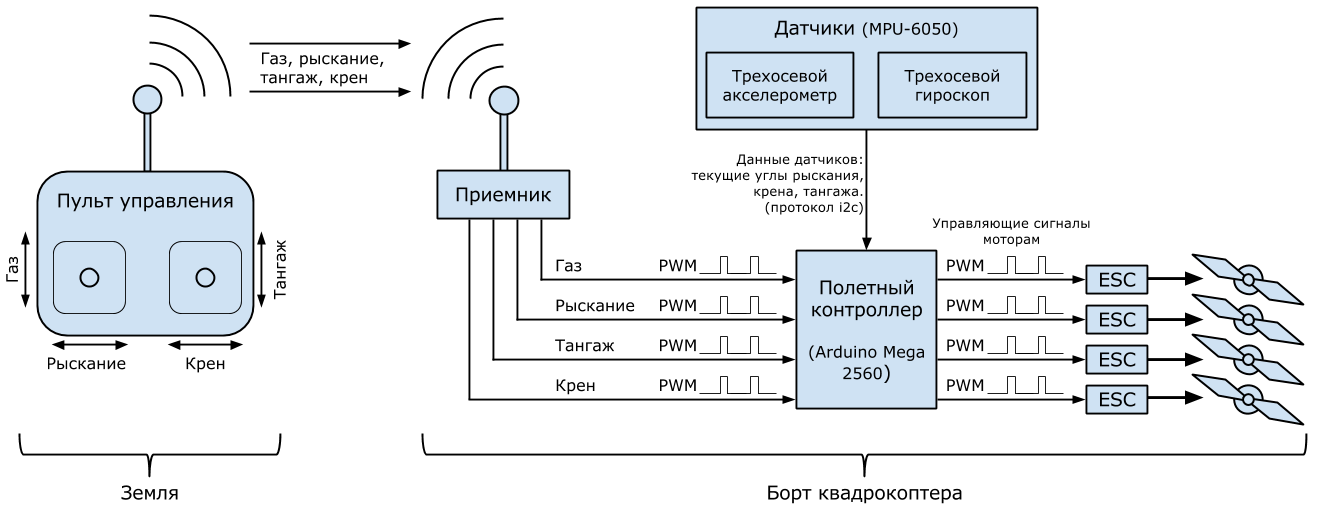
* รูปแบบที่ง่ายที่สุดของอุปกรณ์ quadrocopter
พวกมันคืออะไร?
ในปัจจุบัน ตลาดโดรนสำหรับผู้บริโภคมีเครื่องบินหลายลำ (โดรน) จำนวนมาก แต่โดยทั่วไปแล้ว พวกเขาสามารถแบ่งออกเป็นสามกลุ่มใหญ่: สำหรับ มือใหม่ / มือสมัครเล่น / มืออาชีพ
สำหรับผู้เริ่มต้น - เหมาะสำหรับทั้งเด็กและผู้ใหญ่เพื่อทำความรู้จักและเรียนรู้ครั้งแรก ตามกฎแล้ว พวกเขาจะติดตั้งไมโครโปรเซสเซอร์ ไจโรสโคป 6 แกน และเซ็นเซอร์ความกดอากาศแบบง่ายเพื่อให้แน่ใจว่าอยู่ในระดับความสูง
มือสมัครเล่น - สำหรับนักบินที่มีประสบการณ์กับ UAV แล้ว เหมาะสำหรับการใช้งานเฉพาะ ตัวอย่างเช่น สำหรับการถ่ายภาพทางอากาศ หรือสำหรับกีฬา เช่น การแข่งโดรน โดรนในกลุ่มนี้สามารถมีฟังก์ชั่นการบินและสำรวจอัตโนมัติ
มืออาชีพ - เหมาะสำหรับนักบินที่มีประสบการณ์ซึ่งใช้ความสามารถของมัลติคอปเตอร์ (โดรน) ในสาขาอาชีพเท่านั้น ตัวอย่างเช่น การถ่ายภาพและวิดีโอระดับมืออาชีพ, มาตรวิทยา, การตรวจสอบที่ดิน, การจราจร, ในการปฏิบัติการกู้ภัย ฯลฯ ในกรณีส่วนใหญ่ โดรนจะมีฟังก์ชั่นการบินและสำรวจอัตโนมัติ การบรรจุแบบอิเล็กทรอนิกส์ประกอบขึ้นจากระบบสมัยใหม่ที่มีความแม่นยำสูงซึ่งให้การกำจัดในระยะทางไกล และแหล่งจ่ายไฟช่วยให้คุณใช้เวลามากขึ้นในการบิน ความแตกต่างของลักษณะเฉพาะระหว่างมัลติคอปเตอร์ดังกล่าวคือราคา
เพื่อให้คุ้นเคยกับระบบไร้คนขับอย่างสมบูรณ์ยิ่งขึ้น เราขอแนะนำหัวข้อ "โดรนคืออะไร"
.






