Nội dung
- Tự làm máy bay không người lái: Bài 1. Thuật ngữ.
- Máy bay không người lái do-it-yourself: Bài 2. Khung.
- Máy bay không người lái do-it-yourself: Bài 3. Nhà máy điện.
- Máy bay không người lái do-it-yourself: Bài 4. Bộ điều khiển máy bay.
- Máy bay không người lái do-it-yourself: Bài 5. Lắp ráp.
- Máy bay không người lái tự làm: Bài 6. Kiểm tra hiệu suất.
- Máy bay không người lái tự làm: Bài 7. FPV và khoảng cách.
- Drone bằng tay của chính bạn: Bài 8. Máy bay.
Giới thiệu
Bây giờ bạn đã chọn tất cả các thành phần chính cho UAV của mình, bạn có thể bắt đầu lắp ráp. Hướng dẫn này sẽ trình bày những lỗi thường gặp khi lắp ráp UAV nhiều cánh quạt, cùng với một số mẹo hữu ích để điều chỉnh. Bài học này sẽ không bao gồm các hạng mục như máy ảnh / hệ thống FPV, thiết bị tầm xa hoặc các phụ kiện khác (chúng tôi sẽ đề cập trong bài 7).
Các thành phần bạn phải có ở giai đoạn này:
- Khung (mua hoặc làm thủ công)
- Động cơ, ESC, cánh quạt, pin, thiết bị sạc
- Bảng phân phối / dây nịt
- Bộ điều khiển máy bay và thiết bị liên lạc (đề xuất điều khiển vô tuyến)

Lực đẩy
Để đạt được các mục tiêu của bài học này, hệ thống đẩy UAV của bạn sẽ bao gồm các thành phần sau:
- Động cơ
- ESC
- Phân bổ công suất (bo mạch hoặc dây nịt)
- Pin
- Bộ điều khiển máy bay
Lưu ý rằng các cánh quạt không được liệt kê. Không cài đặt cánh quạt ở giai đoạn này! Các vít chính sẽ được nối chỉ trong bài thứ 6. Vì đây là máy bay không người lái đầu tiên của bạn, chúng tôi khuyên bạn nên tạo kết nối điện "không khung" trước khi lắp đặt mọi thứ trên khung; để kiểm tra tất cả các kết nối và loại bỏ các lỗi đã xác định.
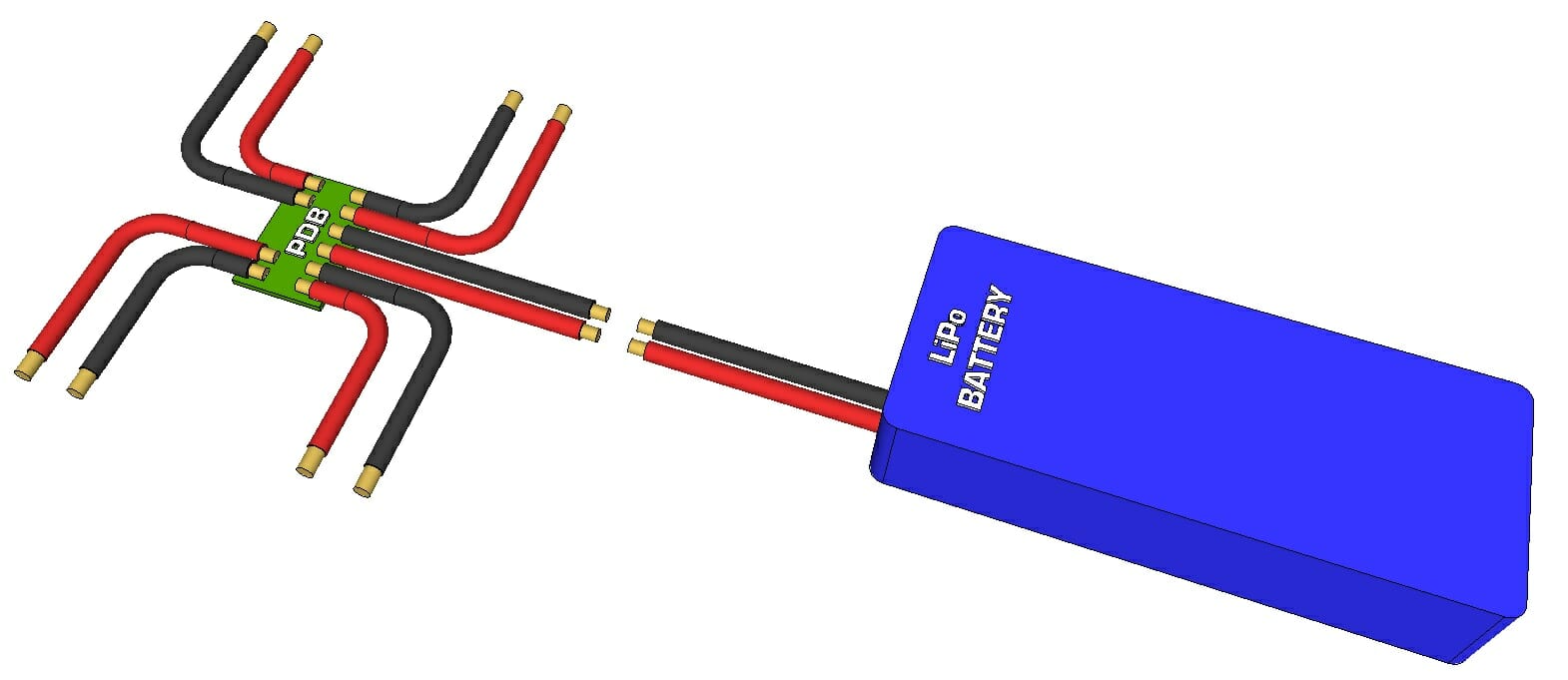
Pin. Phân phối điện
Kết nối giữa pin và hệ thống phân phối điện phải tương đối đơn giản nếu cả hai đều có cùng loại đầu nối. Nếu vậy, hãy chuyển sang bước tiếp theo. Nếu các đầu nối khác nhau, thì trong mọi trường hợp, hãy cắt dây pin để tách đầu nối ra; điều này có thể gây ra đoản mạch và điện giật khó chịu! Thay vào đó, bạn có thể lấy một bộ chuyển đổi và sử dụng nó giữa đầu nối trên pin và đầu nối trên bảng phân phối điện. Một lựa chọn khác có thể là tìm kiếm đầu nối giao phối với đầu nối pin và mua nó; sau đó cắt đầu nối hiện có khỏi bộ phân phối điện và hàn đầu nối đã mua thay thế, trước tiên hãy đảm bảo rằng không có kết nối nào giữa chân dương và chân âm.
Điều quan trọng cần lưu ý là hầu hết các UAV nhiều cánh quạt không có công tắc bật / tắt, vì vậy nguồn điện được cung cấp và ngắt kết nối bằng cách kết nối và ngắt kết nối pin chính khỏi đầu nối bộ phân phối điện, vì vậy đầu nối của chúng phải được được buộc chặt và các dây / điểm hàn được cách điện tốt với ống co nhiệt và / hoặc băng dính điện.
Ngắt kết nối pin khỏi bộ phân phối điện trước khi tiếp tục.
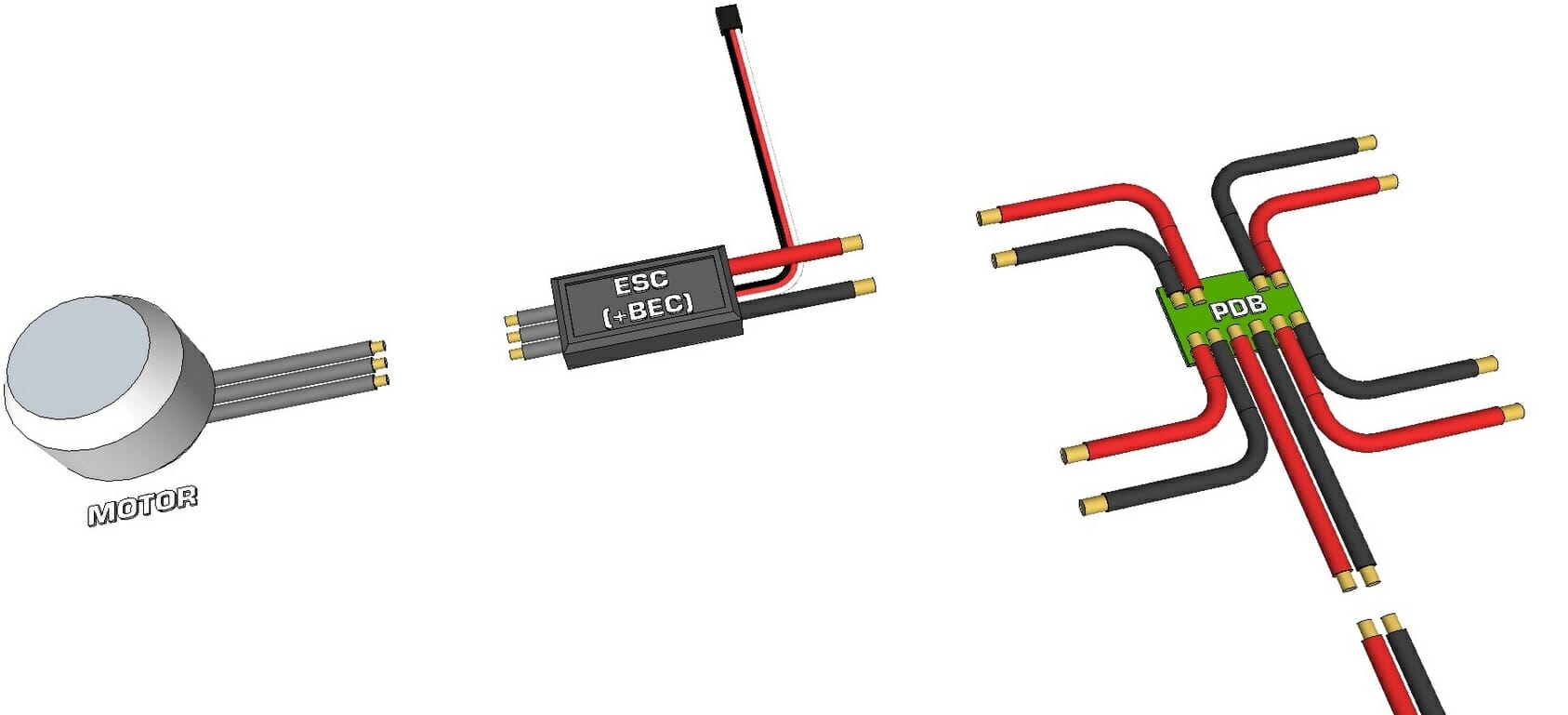
Động cơ. THOÁT. Phân phối điện
Bảng phân phối điện (PDP) hoặc phân phối có dây chủ yếu phục vụ để phân phối điện từ pin chính đến mỗi ESC. Điện áp được cung cấp cho ESC "nguyên trạng", do đó không cần tăng (tăng) hoặc giảm (giảm) điện áp. Nếu máy bay không người lái của bạn có bốn động cơ, thì bạn nên có bốn ESC và do đó bảng phân phối / phân phối dây của bạn cuối cùng sẽ chia pin chính thành bốn kết nối. Nếu PRP của bạn có sáu kết nối và bạn đang xây dựng một quadrocopter, thì bạn chỉ cần kết nối hai kết nối cuối cùng. Nếu bạn đang chế tạo một bộ lục giác, PDP của bạn sẽ phân phối nguồn điện từ pin chính cho sáu kết nối. ESC bao gồm các dây sau:
- Một dải băng 3 dây 0,1 inch với đầu nối R / C, trong đó chân màu đen thường được nối đất, chân màu đỏ cung cấp đầu ra 5V (thông qua BEC*) và màu vàng / trắng là đầu vào tín hiệu.
- Ba dây riêng biệt kết nối với ba dây trên động cơ DC không chổi than (thường được cung cấp với đầu nối đạn cái đã được hàn hoặc đi kèm).
- Hai đầu nối đầu vào để kết nối pin với PDB (một số bao gồm đầu nối hàn với hàn, một số được bao gồm, và đôi khi không hề).
*ESC thường có Mạch loại bỏ pin tích hợp (hoặc BEC) để chuyển đổi điện áp pin chính thành 5V để cấp nguồn cho bộ thu và bộ điều khiển bay. 5V thường được cấp qua đầu nối RC từ ESC (thường là chân giữa / chân màu đỏ). Bạn chỉ cần một BEC để cấp nguồn cho bộ điều khiển chuyến bay.
Nếu bảng phân phối điện sử dụng đầu nối không khớp với đầu nối trên ESC hoặc pin, thì bạn sẽ cần phải mua bộ điều hợp (adapter) hoặc mua đầu nối mới và thay thế chúng trên ESC hoặc PRP. Lợi thế vẫn là bảng phân phối điện, các đầu nối phù hợp với pin và ESC. Thông thường, pin lithium-polymer của UAV có thể có đầu nối DEANSXT60EC3
Nếu bạn muốn cấp nguồn bổ sung cho các thiết bị điện tử dòng điện thấp (đèn LED, mặt dây chuyền, v.v.) nhưng không có kết nối dự phòng trên bảng phân phối điện, bạn có thể sử dụng cáp sạc pin. Đầu nối sạc màu trắng thường có một chân nối đất và một chân cắm cho mỗi ô (1S, 2S, 3S, v.v.) được sử dụng trong cụm pin LiPo. Mặc dù đầu nối này thực sự chỉ để sạc pin nhưng nó có thể cung cấp điện áp đầu ra 3,7V từ mỗi chân và có thể được sử dụng để cấp nguồn cho các thiết bị điện tử dòng điện thấp như dây nịt hoặc đèn LED.
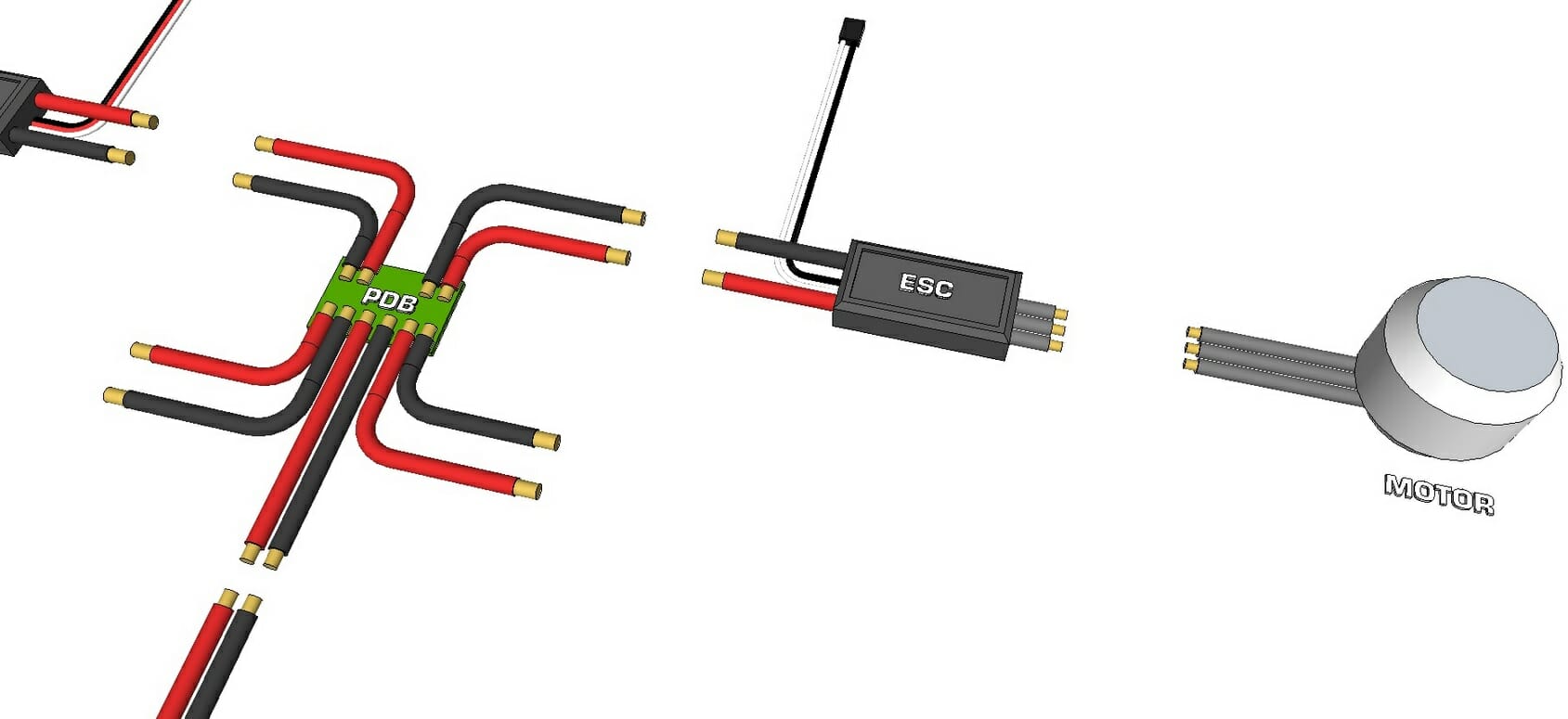
- Tháo dây dẫn màu đỏ khỏi mọi đầu nối R / C 3 chân của điều khiển hành trình, trừ một đầu nối. Bạn nên làm điều này theo cách mà bạn luôn có thể cắm chúng trở lại nếu cần. Quấn đầu của mỗi dây loại trừ bằng băng dính điện hoặc sử dụng ống co nhiệt để cách điện để sau này chúng không thể tiếp xúc với các thiết bị điện tử khác. Dây màu đỏ duy nhất được giữ nguyên sẽ cấp nguồn cho bộ điều khiển bay được sử dụng trong bộ phận lắp ráp.
- Kết nối hai dây cung cấp của mỗi ESC với bảng phân phối, đảm bảo dây màu đỏ chuyển sang cực dương () và dây màu đen là cực âm (-).
- Nếu bảng phân phối điện bạn đang sử dụng có đầu nối R / C riêng, thì trong trường hợp này, bạn có thể kết nối chân R / C của mỗi ESC với đầu nối R / C trên bảng này không hoặc kết nối chúng trực tiếp với bộ điều khiển chuyến bay.
- Kết nối từng đầu nối trong số ba đầu nối động cơ với ba đầu nối ESC. Hiện tại, thứ tự kết nối các đầu nối này không quan trọng (nếu nó ảnh hưởng đến hướng quay, nó sẽ được sửa lại nếu cần thiết sau này).
Xin lưu ý rằng nếu bạn quyết định loại bỏ hoặc ẩn hệ thống dây điện ở giai đoạn này, sau này bạn có thể cần truy cập một số kết nối theo quy trình được mô tả trong Bài 6, cụ thể là hoán đổi kết nối giữa ESC và động cơ để động cơ quay theo hướng ngược lại.

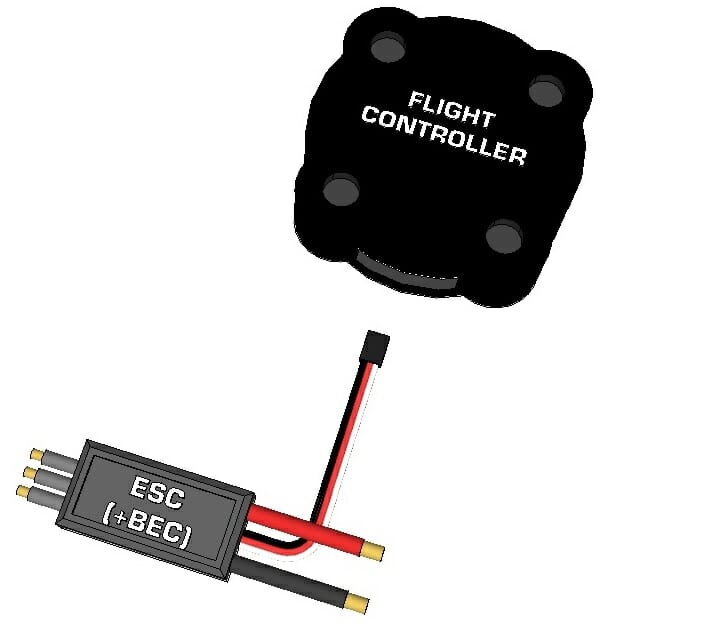
ESC. Bộ điều khiển chuyến bay.
Giờ đây, bạn có thể kết nối đầu vào R / C của bộ điều khiển hành trình với bộ điều khiển chuyến bay. Bộ điều khiển chuyến bay bạn chọn phải có sơ đồ cho thấy chân bộ điều khiển nào được kết nối với động cơ của cụm nhiều cánh quạt của bạn. Biểu đồ này cũng nên hiển thị hướng quay của mỗi động cơ, nhưng một lần nữa, bạn không cần phải xem xét hướng quay lúc này.
- Xem sơ đồ kết nối giữa động cơ / ESC và bộ điều khiển bay trong sách hướng dẫn sử dụng PC.
- Kết nối các đầu nối R / C của mỗi ESC với các chân tương ứng trên bộ điều khiển máy bay, đảm bảo dây nối đất (thường là màu đen) kết nối với chân nối đất của bộ điều khiển máy bay và chân tín hiệu (màu trắng hoặc vàng) kết nối với chân tín hiệu trên bộ điều khiển máy bay...
- Chỉ một trong các đầu nối RC vẫn có chân (nguồn) màu đỏ.
Giao tiếp
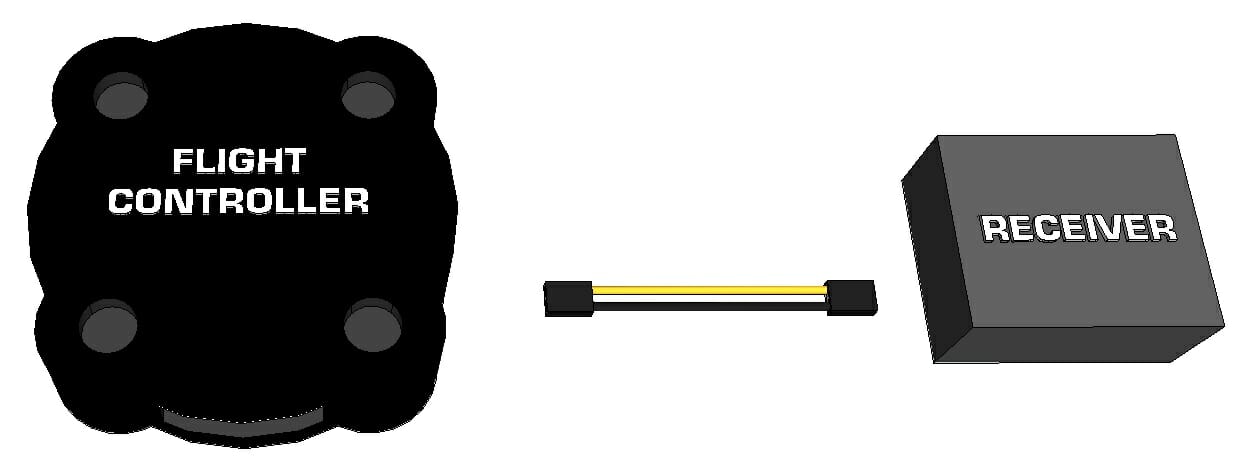
Máy thu. Bộ điều khiển chuyến bay.
Giả sử trong bài học này, bạn đã lựa chọn có lợi cho điều khiển vô tuyến làm thiết bị đầu vào. Nếu bạn muốn sử dụng WiFi, Bluetooth hoặc phương thức nhập khác, vui lòng đọc hướng dẫn sử dụng bộ điều khiển máy bay và tìm kiếm đầu vào nối tiếp; Phần này sẽ mô tả cách / vị trí kết nối thiết bị đầu vào nối tiếp với bộ điều khiển máy bay. Rất có thể bạn sẽ cần tìm và kết nối các chân truyền (Tx), nhận (Rx), điện áp (5V) và GND từ thiết bị không dây với thiết bị phát, cho phép Rx từ Tx này sang Tx của thiết bị khác và ngược lại.
Bộ phát RC của bạn phải đi kèm với bộ thu RC thích hợp. Bộ thu phải được liên kết với bộ phát để bạn có thể tháo jumper liên kết khỏi bộ thu (nếu có). Bộ này cũng có thể bao gồm một giá đỡ pin AA, được thiết kế để cấp nguồn cho bộ thu, nhưng chúng tôi sẽ không sử dụng nó vì BEC sẽ cấp nguồn cho cả bộ thu và bộ điều khiển máy bay. Để biết các kênh thu RC kết nối với chân nào trên bộ điều khiển máy bay, bạn cần xem hướng dẫn sử dụng của cả bộ điều khiển chuyến bay và hệ thống RC.
Hướng dẫn sử dụng bộ điều khiển máy bay sẽ chỉ ra vị trí của các chân sau sẽ được khớp và kết nối với bộ thu:
- Throttle
- Pitch
- Yaw
- Cuộn
- Công tắc Aux 1, 2, 3, v.v.
Giờ đây, bạn có thể thực hiện các kết nối sau:
- Đọc hướng dẫn sử dụng bộ điều khiển máy bay để xem chân đầu vào R / C nào được kết nối với các chức năng trên.
- Đọc hướng dẫn sử dụng bộ phát cho kênh nào được liên kết với từng chức năng.
- Một số bộ phát RC có thể được lập trình lại để thay đổi chức năng của từng tiếp điểm. Nếu bạn quyết định thay đổi bất kỳ đầu vào nào (cần điều khiển hoặc công tắc), chỉ làm như vậy sau khi đảm bảo rằng bạn biết kênh nào trên bộ thu tương ứng với chức năng nào. Throttle, Pitch, Yaw và Roll phải luôn được kết hợp với hai gậy / cần điều khiển, không phải công tắc hoặc nút.
- Kết nối kênh Throttle trên bộ thu với đầu vào Throttle trên bộ điều khiển máy bay.
- Kết nối kênh Pitch trên bộ thu với đầu vào Pitch trên bộ điều khiển máy bay.
- Kết nối kênh Yaw trên bộ thu với đầu vào Yaw trên bộ điều khiển máy bay.
- Kết nối GND trên bộ điều khiển bay (thường là hàng chân thứ ba) với GND trên bộ thu (thường là hàng chân thứ ba).
- Nếu đầu vào phụ được sử dụng, hãy kết nối Aux 1 trên bộ thu với Aux 1 trên bộ điều khiển bay, v.v.
Bạn có thể sử dụng dây servo 3 chân cho mỗi kênh, nhưng chỉ một trong các kênh (có thể là bất kỳ) phải có điện áp và nối đất; phần còn lại chỉ cần dây tín hiệu. Tất cả các kết nối có thể là GND đến GND, mặc dù chỉ cần một kết nối. Một lần nữa, bộ thu không cần pin riêng vì nó sẽ được cấp nguồn bởi bộ điều khiển bay, được cung cấp bởi BEC từ một trong các ESC.
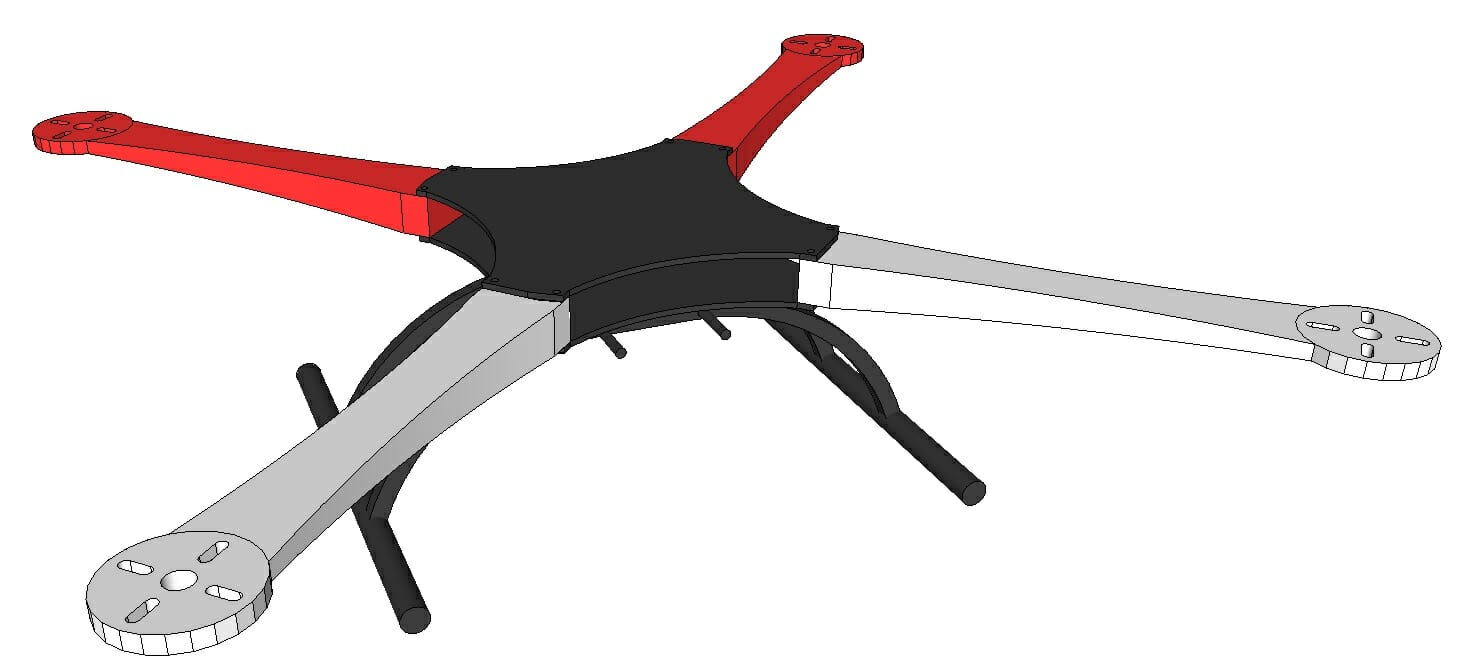
Lắp ráp khung
Nếu bạn đang xây dựng khung của riêng mình, bạn có thể lắp ráp nó ở giai đoạn này. Nếu bạn đã mua một bộ khung, hãy làm theo hướng dẫn lắp ráp. Xin lưu ý rằng bạn có thể cần phải tháo rời một số khu vực nhất định để tạo điều kiện kết nối hoặc loại bỏ (ẩn) các phần tử điện. Mục đích là đảm bảo rằng không có gì bị lỏng, tất cả các dây đều được buộc chặt và không có gì có thể rơi ra khỏi khung hoặc bị rối.
Cài đặt
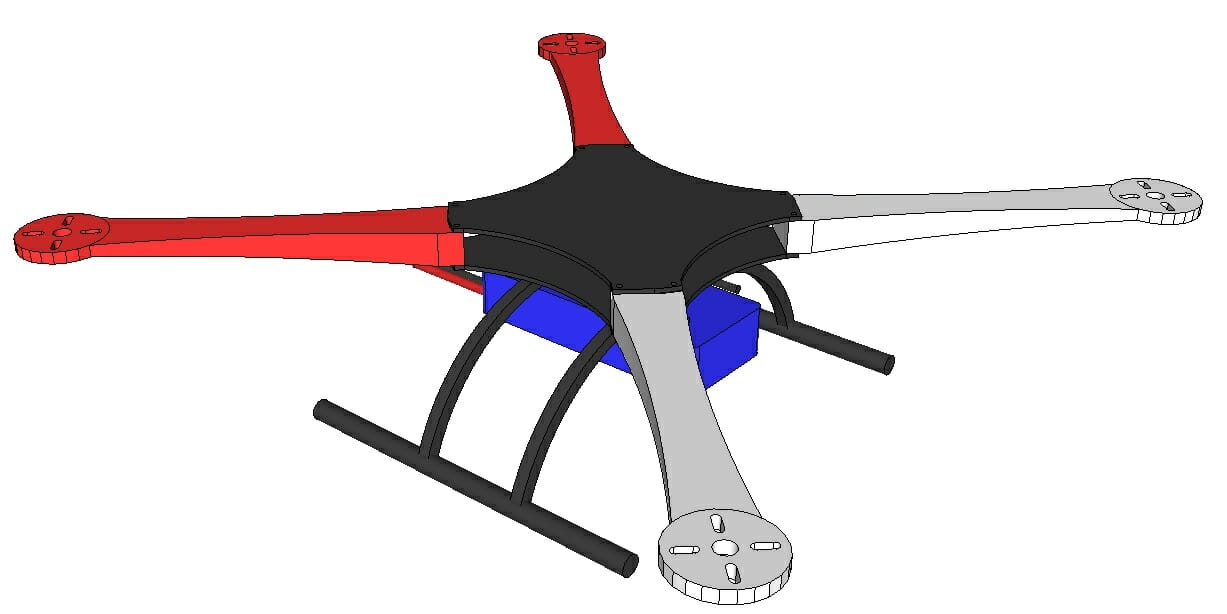
Vị trí pin.
Pin được sử dụng để cung cấp năng lượng thường là phần tử nặng nhất trên UAV và có thể dao động từ 1/4 đến 1/2 tổng trọng lượng của nó. Vì vậy, nơi lắp đặt của nó là rất quan trọng. Vị trí lý tưởng cho pin chính phải ở giữa máy bay để tất cả các động cơ có thể chịu tải gần như nhau. Nếu pin được đặt gần phía sau máy bay hơn, động cơ phía sau sẽ phải cung cấp nhiều lực đẩy hơn so với động cơ phía trước, và do đó, tổng lực đẩy tối đa sẽ bị hạn chế (khi động cơ phía sau ở mức tối đa, sẽ không có lực đẩy trên các động cơ phía trước). Trong khi đó, cách tiếp cận thông thường trong thiết kế nhiều cánh quạt là giữ cho máy bay đối xứng về một đường tâm (hoặc ít nhất một trục), vì vậy pin nên được đặt dọc theo đường tâm đó thay vì lệch sang bên này hay bên kia...
Tiếp theo, bạn sẽ cần quyết định đặt pin ở độ cao nào. Có một số nơi có thể lắp pin:
- Dưới khung (máy bay sẽ nặng bên dưới, ổn định hơn và ít nhào lộn hơn).
- Trực tiếp dưới động cơ (thường là bên trong khung); có thể là một trong những nơi tốt nhất.
- Ở cùng độ cao với động cơ hoặc rôto (ví dụ lắp trên đầu khung).
- Phía trên các cánh quạt (UAV sẽ nặng hơn ở phía trên và dễ bị lật hơn).
Để có hiệu suất tốt nhất, lý tưởng nhất là pin nên được đặt ở vị trí 3 ở trên. Vị trí 4 tạo ra hiệu ứng của một con lắc ngược và nếu UAV nghiêng quá một góc nhất định, máy bay không người lái sẽ có xu hướng lật. Vị trí 1 sẽ tạo ra một nền tảng khá ổn định mà về bản chất, nó có xu hướng duy trì mức độ ổn định, nhưng cực kỳ không thích hợp cho các màn nhào lộn. Do đó, hầu hết các nhà thiết kế chọn vị trí số 2 và đặt pin ngay dưới khung hoặc bên trong nó. Cách tiếp cận này giải phóng không gian bên dưới khung cho các tải trọng như hệ thống treo và không gian bên trên cho bộ điều khiển chuyến bay và các thiết bị điện tử khác dễ tiếp cận nhất có thể.
Gắn pin
Có nhiều cách phổ biến để gắn pin vào khung, bao gồm:
- Dây đai khóa dán
- Velcro tự dính (một mặt được dán vào pin và mặt kia dán vào khung)
- Trong khung
Dây dán Velcro phổ biến nhất cho loại vừa “ Máy bay không người lái tùy chỉnh kích thước tiêu chuẩn Trong khi khung bao quanh phổ biến nhất trên máy bay không người lái thương mại, khung của các UAV như vậy được hình thành dưới áp lực và để lại không gian bên trong đặc biệt cho một loại pin cụ thể. Velcro lý tưởng chỉ nên được sử dụng nếu pin tương đối nhẹ; Thay vì một đoạn ngắn ở trung tâm, bạn nên dán một dải dọc theo toàn bộ chiều dài của pin. Nếu bạn đang sử dụng dây đai Velcro và nhận thấy rằng pin có xu hướng bật ra do thiếu độ bám, bạn nên thêm dải cao su ở nơi pin tiếp xúc với dây đai. Không nên sử dụng keo để cố định pin vào khung. Nếu bạn không sử dụng UAV, hãy tháo pin và cất trong túi an toàn LiPo hoặc bình chứa bằng sứ.
Sạc pin
Rất có thể bạn đã chọn Lithium Polymer (LiPo) hoặc pin lithium khác. Hầu hết các loại pin LiPo trên 3.7V đều có cáp sạc riêng với đầu nối nhiều chân để sạc, trong khi cáp nguồn có thể được xác định bằng sự hiện diện của đầu nối hai chân với dây lớn hơn có khả năng chịu dòng phóng điện cao. Đầu nối sạc thường có một tiếp điểm cho mỗi ngân hàng pin, cũng như một tiếp điểm chung.
Do những nguy hiểm liên quan đến pin LiPo (hydro và điện), thông thường người ta thường tháo hẳn pin ra khỏi máy bay không người lái khi không sử dụng và đặt nó vào túi LiPo Safe. Túi cũng được sử dụng khi sạc pin (kết nối pin với bộ sạc, đặt pin vào túi (để bộ sạc bên ngoài túi) và đóng nó lại (nó thường có nắp Velcro).
.Vị trí và lắp bộ điều khiển bay
Tốt nhất, bộ điều khiển bay nên được đặt ở trung tâm của máy bay không người lái ở cùng độ cao với động cơ. Nếu không thể, thì có thể đặt bộ điều khiển cao hơn hoặc thấp hơn một chút. hướng sang bên trái hoặc bên phải và tránh lắp nó về phía trước hoặc phía sau. Bộ điều khiển có thể được cố định theo bất kỳ cách cơ bản nào sau đây:
- Vít / Đai ốc / Đế thẳng (cơ bản)
- Băng keo hai mặt (đảm bảo nó đủ chắc chắn)
- Băng keo xốp hai mặt (để đạt được hiệu ứng giảm chấn)
- Ống lót giảm chấn bằng cao su (để giảm chấn cao)
Một số bộ điều khiển máy bay có hoặc có thể có vỏ bảo vệ tùy chọn.
Ở giai đoạn này, bạn nên có một UAV được lắp ráp và kết nối hoàn chỉnh, không bao gồm các cánh quạt. Bài 6 bao gồm thiết lập và chạy thử máy phát, phần mềm điều khiển chuyến bay, kiểm tra trước chuyến bay và chuyến bay đầu tiên.







