Nội dung
- Tự làm máy bay không người lái: Bài 1. Thuật ngữ.
- Máy bay không người lái do-it-yourself: Bài 2. Khung.
- Máy bay không người lái do-it-yourself: Bài 3. Nhà máy điện.
- Máy bay không người lái do-it-yourself: Bài 4. Bộ điều khiển máy bay.
- Máy bay không người lái do-it-yourself: Bài 5. Lắp ráp.
- Máy bay không người lái tự làm: Bài 6. Kiểm tra hiệu suất.
- Máy bay không người lái do-it-yourself: Bài 7. FPV và khoảng cách.
- Drone bằng tay của chính bạn: Bài 8. Máy bay.
Giới thiệu
Trong Bài 5, bạn phải hoàn thành việc lắp ráp máy bay không người lái (không lắp cánh quạt). Hãy dành thời gian của bạn, vì ngay cả những sai lầm nhỏ cũng có thể dẫn đến sự cố. Bạn vẫn còn một vài bước trước chuyến bay đầu tiên, vì vậy hãy kiên nhẫn và làm theo các hướng dẫn bên dưới. Như trong bài trước, chúng ta sẽ tiếp tục giả định rằng bạn sử dụng thiết bị điều khiển vô tuyến để tương tác với UAV (là phương pháp điều khiển được sử dụng rộng rãi nhất ở thời điểm hiện tại).
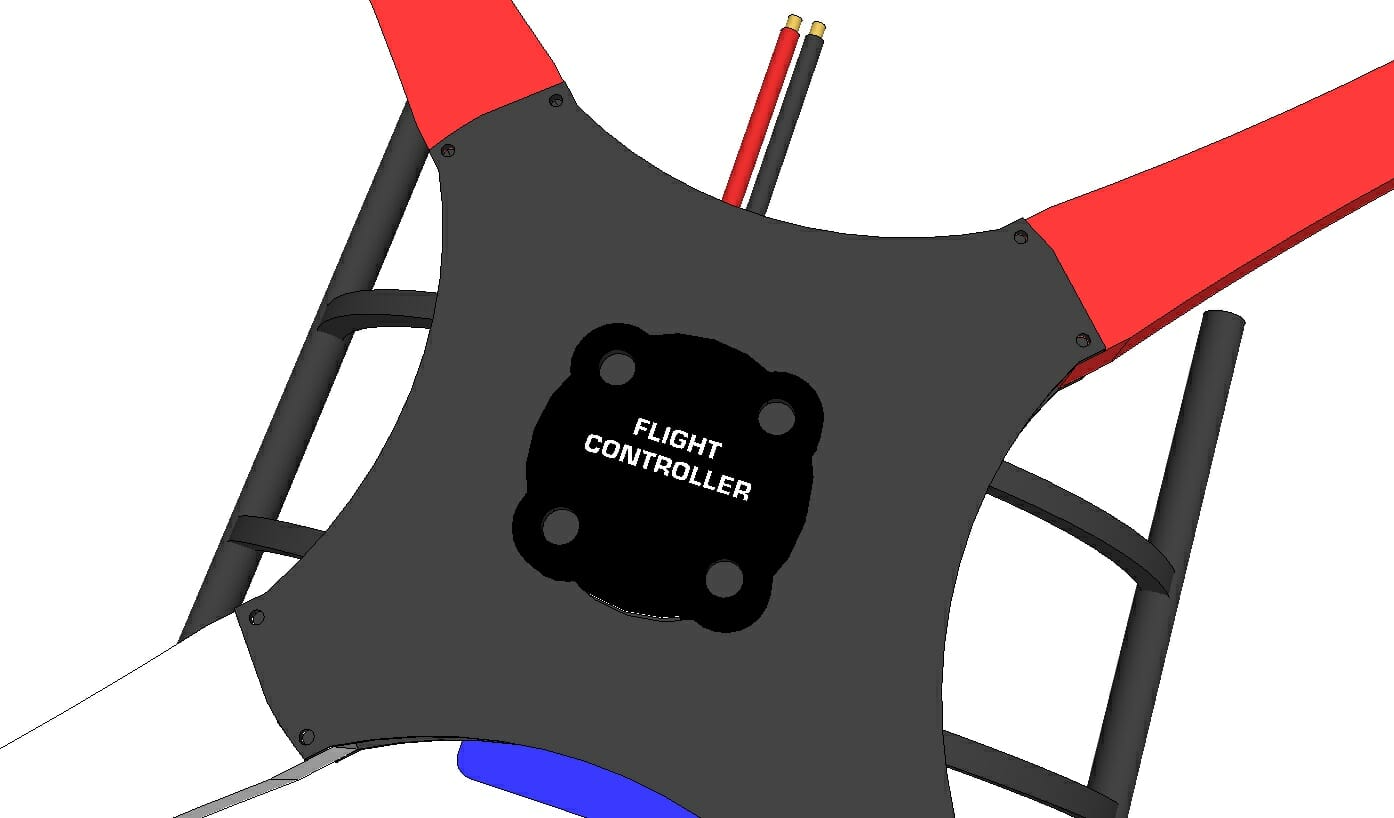
Bộ điều khiển máy bay
- Không phải tất cả bộ điều khiển máy bay đều giống nhau, vì vậy quy trình thiết lập thực sự phụ thuộc vào kiểu máy bạn chọn. Nếu bạn chưa đọc, hãy dành thời gian đọc kỹ hướng dẫn sử dụng của bộ điều khiển chuyến bay đã chọn từ đầu đến cuối. Bỏ sót chi tiết nhỏ nhất có thể tạo ra sự khác biệt giữa chuyến bay thành công đầu tiên và việc xóa sổ hoàn toàn. Hướng dẫn sử dụng được viết tốt nên bao gồm mọi thứ bạn tìm thấy trên trang này và hơn thế nữa, vì vậy bạn nên sử dụng hướng dẫn này như một danh sách kiểm tra chứ không phải là một sự thay thế / thay thế cho các hướng dẫn cơ bản dành cho nhà phát triển.
- Hầu hết các bộ điều khiển chuyến bay cung cấp quy trình từng bước để lựa chọn cài đặt cho một cấu hình UAV cụ thể, bao gồm toàn quyền kiểm soát các giá trị PID. Các giá trị cho mỗi (P, I và D) có thể được điều chỉnh cho khung hình và kiểu bay cụ thể của bạn; từ thứ gì đó ổn định hơn để sử dụng nền tảng trong chụp ảnh trên không, đến thứ gì đó tương tự hơn với các chuyến bay thể thao (thực hiện lộn nhào, đua máy bay không người lái, v.v.). Nó thường bắt đầu với các giá trị mặc định cho từng trường và nếu bạn không có đủ kinh nghiệm để thay đổi chúng, bạn nên để nguyên mọi thứ cho đến chuyến bay đầu tiên.
- Hướng dẫn sử dụng bộ điều khiển máy bay cũng phải chỉ ra cách đặt RPM tối thiểu của động cơ, tức là đặt tốc độ quay của động cơ khi chúng được tải. Ban đầu, bạn có thể đặt giá trị này tương đối thấp - chỉ đủ để thấy các động cơ quay, nhưng không quá nhiều để các UAV bị di chuyển bởi lực đẩy mà chúng tạo ra. Lực đẩy tối đa, nếu bạn có thể đặt giá trị này, phải tương ứng với giá trị lớn nhất mà cần ga của thiết bị điều khiển của bạn có thể cung cấp.
- Một khía cạnh có thể được thảo luận trong hướng dẫn sử dụng của bộ điều khiển máy bay mà không đưa ra bất kỳ đề xuất nào là chế độ máy bay. Quay trở lại Bài 4, “Chế độ máy bay” xác định cảm biến nào được sử dụng để ổn định máy bay không người lái, cũng như chức năng / mục đích của nó. Các cảm biến phổ biến nhất được tìm thấy trên bộ điều khiển chuyến bay là con quay hồi chuyển, gia tốc kế, phong vũ biểu, la bàn và có thể cả GPS.
- Nếu đây là máy bay không người lái đầu tiên của bạn, bạn nên để chế độ bay ổn định nhất có sẵn cho bộ điều khiển bay của bạn, chế độ này sử dụng hầu hết các cảm biến hiện có để ổn định máy bay không người lái. Nói chung, điều này là do cài đặt PID có thể quá xa so với khung / cài đặt của bạn, đó là lý do tại sao tốt nhất bạn nên chọn các giá trị PID mặc định. Nếu bạn đã bay trước đây, chế độ ACRO (chỉ sử dụng con quay hồi chuyển) có thể là tốt nhất.
- Hầu hết các bộ điều khiển chuyến bay cũng sẽ cho phép bạn thay đổi “chế độ máy bay” trong chuyến bay thông qua một kênh dự phòng. Ví dụ: nếu điều khiển từ xa của bạn có sáu kênh, bạn có thể cân nhắc chỉ định kênh 5 hoặc 6 (thường được kết hợp với công tắc) để bạn có thể thay đổi chế độ bay trong khi bay máy bay không người lái. Trước khi bay, hãy chắc chắn rằng bạn biết vị trí chuyển đổi tương ứng với chế độ bay nào.
- Chúng tôi đặc biệt không khuyến khích sử dụng chuyến bay qua điểm phát sóng GPS hoặc bất kỳ chức năng / cảm biến phức tạp nào (ví dụ: cảm biến khoảng cách siêu âm để xác định khoảng cách tới mặt đất) cho đến khi bạn chắc chắn rằng UAV đã được điều chỉnh tốt. Một số sách hướng dẫn khuyên bạn chỉ nên sử dụng chế độ ACRO (nhào lộn), tuy nhiên, nếu bạn chưa có kinh nghiệm bay đáng kể, bạn sẽ không thể bay ở chế độ này về mặt thể chất, đây là chế độ khó điều khiển nhất vì tính năng ổn định bị loại trừ.
Cấu hình của thiết bị điều khiển
- Một số bảng điều khiển có các phương thức hoạt động khác nhau, chẳng hạn như Máy bay, Trực thăng, Ô tô, v.v. Trong 4 (Phần: Điều khiển), chúng ta đã thảo luận về bốn kênh điều khiển chính: Throttle, Yaw, Pitch và Roll, thường là các giá trị liên quan đến máy bay hoặc trực thăng. Nếu hướng dẫn sử dụng bộ điều khiển máy bay không chỉ định chế độ cụ thể cho máy phát, bạn nên sử dụng Chế độ trên máy bay.
- Có hai loại điều khiển từ xa: Chế độ 1 (Chế độ 1) và Chế độ 2 (Chế độ 2). Chế độ 2 (phổ biến nhất) với loại điều khiển này là Throttle và Yaw được liên kết với kênh / thanh / phím điều khiển bên trái, Pitch và Roll với bên phải. Bạn cũng có thể kiểm tra lại bài tập của chúng bằng cách di chuyển trực tiếp các que để đảm bảo các giá trị không bị đảo ngược.
- Chế độ máy phát thường thêm các mức “bù” kênh / tín hiệu để làm cho chuyển động phù hợp hơn với một hệ thống cụ thể, tuy nhiên, hầu hết người điều khiển máy bay quan tâm đến bất kỳ khoảng bù nào và như vậy, thích các giá trị "thô" hơn. Nếu bộ phát của bạn không có bất kỳ chế độ nào, chỉ cần kiểm tra kênh / thanh / phím điều khiển nào chịu trách nhiệm cho chế độ đó.
- Bộ phát RC đa năng chỉ có thể cung cấp một phạm vi tín hiệu hạn chế trên mỗi kênh, và do đó, trong bài học này, chúng tôi khuyên bạn nên tìm hiểu dải giá trị mà bộ phát RC có thể cung cấp và liệu mức tối thiểu và giá trị tối đa có thể được điều chỉnh (hoặc dưới dạng giá trị hoặc phần trăm của phạm vi mặc định). Ví dụ: bộ điều khiển chuyến bay dựa trên MultiWii yêu cầu bộ phát có thể cung cấp đầy đủ các xung từ 500ms đến 2500ms, trong khi cài đặt mặc định chỉ có thể là 1000ms đến 2000ms vì đây là cấu hình phổ biến cho máy bay R / C. Đọc hướng dẫn sử dụng máy phát của bạn để biết cách đặt điểm cuối / dải tín hiệu (nếu có).
- Nếu bộ điều khiển của bạn có màn hình LCD, bạn thường có thể thực hiện việc này thông qua giao diện trong “Cài đặt”.
- “Thử nghiệm thiết bị điều khiển ở mức tối đa. Khoảng cách ”dễ thực hiện nhất với sự trợ giúp của bạn bè / người trợ giúp hoặc kết nối bộ rung hoặc phản hồi âm thanh / hình ảnh khác với máy bay không người lái RC. Một số mô hình cao cấp hơn có chức năng kiểm tra phạm vi. Mục tiêu của bài kiểm tra là để xem tín hiệu truyền đi bao xa trước khi người nhận không thể thu được nữa. Chỉ nên sử dụng bài kiểm tra tầm bay sau cái gọi là "Chuyến bay chiến đấu" (Máy bay chiến đấu - máy bay không người lái được kiểm tra hiệu suất ở khoảng cách ngắn, trong tầm nhìn của phi công-máy bay không người lái). Quy trình Kiểm tra Phạm vi:
- Bật thiết bị điều khiển, sau đó bật máy bay.
- Lùi lại 15 mét và kích hoạt công tắc liên kết với bộ rung; Bạn phải nghe thấy anh ta.
- Nếu bạn không có còi, hãy bật máy bay và đảm bảo động cơ đang chạy.
- Tắt tiếng còi / điều chỉnh lại máy bay không người lái
- Lặp lại các bước này ngày càng xa (đường ngắm) cho đến khi máy bay không người lái phản hồi lại thông tin đầu vào của bạn.
- Đây sẽ là khoảng cách tối đa tuyệt đối mà bạn có thể bay máy bay không người lái của mình.
- Bạn có thể nghĩ rằng bạn không định bay nó xa như vậy, nhưng hãy nhớ rằng máy bay không người lái đang di chuyển theo ba trục và có thể xảy ra sự cố.
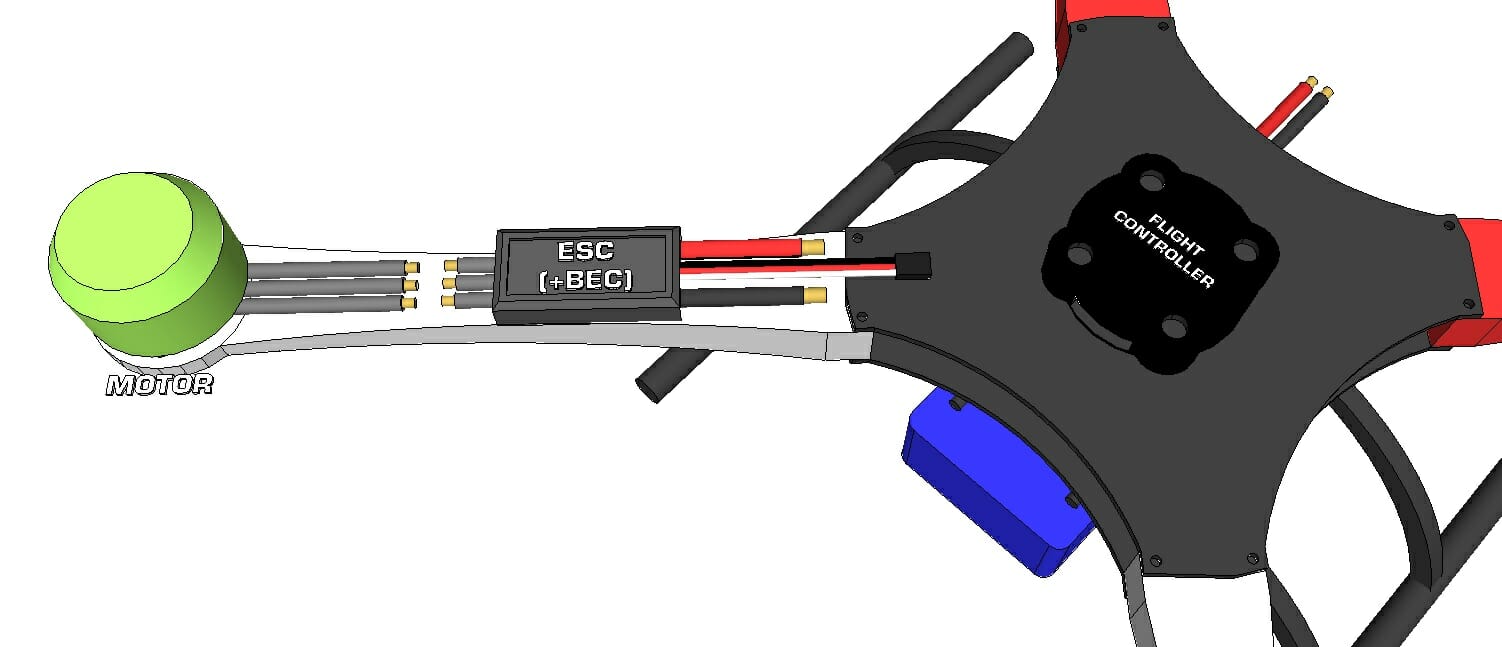
Hiệu chỉnh ESC
ESC sẽ hoạt động hiệu quả, nhưng các tín hiệu (PWM / PWM) liên quan đến van tiết lưu tối thiểu và tối đa có thể không khớp với những gì cung cấp máy phát của bạn. Do đó, bạn cần phải “huấn luyện” mỗi ESC với các giá trị cần thiết. Đảm bảo rằng cánh quạt không được gắn trên động cơ. Tham khảo hướng dẫn sử dụng bộ điều khiển máy bay của bạn. Sau khi lập trình lại, ESC vẫn giữ cấu hình hiện tại của nó ngay cả khi nó không được cấp nguồn. Do đó, mỗi ESC chỉ được lập trình một lần, trong quá trình thử nghiệm / thiết lập ban đầu.
Thông thường có một phần trong sách hướng dẫn điều khiển chuyến bay giải thích cách hiệu chỉnh ESC và giải thích cách thực hiện. Nếu không, bạn có thể thử một trong các phương pháp được gợi ý bên dưới. Một lần nữa, nếu bạn vẫn chưa tháo các cánh quạt của mình, thì đã đến lúc làm như vậy.
Bộ phát
- Kết nối một ESC với chân “Tiết lưu” trên bộ thu của bạn. Nếu ESC của bạn không có BEC được kết nối, bạn có thể kết nối một ESC hỗ trợ BEC với một chân khác trên bộ thu (chẳng hạn như đầu vào pin) chỉ để cấp nguồn cho bộ thu.
- Kết nối ESC với động cơ thích hợp (nếu chưa được kết nối).
- Đặt cần / cần điều khiển liên kết với “Throttle” ở mức tối đa (thường là cần / cần điều khiển bên trái và tiến / lên hoàn toàn), sau đó bật máy phát.
- Kết nối pin LiPo với bảng phân phối điện hoặc trực tiếp với ESC này (nếu các đầu nối tương thích).
- Động cơ sẽ phát ra tiếng bíp ba lần (11,1V LiPo), sau đó là một khoảng dừng ngắn sau đó là hai tiếng bíp ngắn (là tiếng bíp tối đa).
- Ngay sau những tiếng bíp ngắn, di chuyển Cần ga / cần điều khiển đến vị trí thấp nhất (là tiếng bíp nhỏ nhất).
- Động cơ sẽ phát ra tiếng bíp ba lần (11,1V LiPo) sau đó là một tiếng bíp dài.
- Phạm vi van tiết lưu cho ESC này hiện đã được thiết lập, hãy chuyển sang dải tiếp theo cho đến khi tất cả các ESC đã được hiệu chỉnh.
Các phương pháp khác
Làm theo hướng dẫn trong sách hướng dẫn sử dụng sản phẩm để phù hợp với phạm vi đầu vào tối thiểu / tối đa của ESC với những gì nó sẽ nhận được từ máy phát.
- USB: Một số kiểu ESC có thể lập trình qua USB, độc lập hoặc với bộ điều hợp.
- Bảng lập trình: Bảng lập trình ESC bên ngoài, có thể được sử dụng với hầu hết mọi ESC và là một thiết bị độc lập.
- Vi điều khiển: Phương pháp này không được sử dụng rộng rãi, nhưng chắc chắn có thể lập trình lại ESC với vi điều khiển nếu bạn có mã chính xác và có thể kết nối chính xác.
- Bộ điều khiển máy bay: Một số bộ điều khiển máy bay cho phép bạn hiệu chỉnh hoặc lập trình các ESC thông qua giao diện lập trình của chúng. Đọc hướng dẫn cho bộ điều khiển chuyến bay của bạn để xem liệu điều này có thể thực hiện được không.
Động cơ và rôto chính (cánh quạt). Phương hướng.
Bây giờ bạn đã sẵn sàng để lắp các cánh quạt. Hãy quay trở lại 3 bài học, thảo luận về hướng của rôto chính để nó tạo ra lực đẩy. Tất cả các cánh quạt đều có mặt trên và mặt dưới, và hướng quay CW (theo chiều kim đồng hồ) và CCW (ngược chiều kim đồng hồ). Thường có dòng chữ ở trên cùng của một giá đỡ cho biết chiều cao và đường kính của nó. Khi cánh quạt được gắn trên trục động cơ, phần trên này hướng lên bầu trời, bất kể động cơ được gắn trên đỉnh của chùm máy bay không người lái hay ở phía dưới máy bay không người lái.

Danh sách kiểm tra phi công trước khi cất cánh
Mặc dù máy bay không người lái không phức tạp hoặc nguy hiểm như một máy bay thương mại thực sự, nhưng bạn - với tư cách là một phi công và phải có danh sách kiểm tra trước chuyến bay để đảm bảo rằng chuyến bay sắp tới sẽ không gây nguy hiểm cho người và tài sản. Danh sách dưới đây chỉ bao gồm những điều cần thiết và phải thực hiện trước mỗi chuyến bay (không chỉ trước chuyến bay đầu tiên).
- Đảm bảo rằng bạn có sẵn bất kỳ công cụ hỗ trợ trực quan nào để biết phía trước máy bay không người lái của bạn đang ở phía nào. Tối thiểu, hãy dán thêm băng dính màu vào hai thanh dầm phía trước.
- Đảm bảo rằng pin của thiết bị điều khiển đã được sạc.
- Lắc nhẹ UAV - không gì có thể nới lỏng, rung lắc hoặc rơi xuống đất. Bạn sẽ không bao giờ biết những gì có thể đã bị dịch chuyển hoặc bị hỏng do hạ cánh khó khăn trên chuyến bay trước đó.
- Đảm bảo rằng các cánh quạt vẫn được gắn chặt.
- Trước tiên, bật thiết bị điều khiển, sau đó cấp nguồn cho máy bay không người lái (giữ tay bạn khỏi cánh quạt).
- Đảm bảo rằng bạn có thể trang bị và sắp xếp lại động cơ một cách đáng tin cậy (chúng sẽ quay ở tốc độ RPM thấp khi “Cánh tay” và ngừng quay khi “Disarm”)
- Đảm bảo rằng bạn hiệu chỉnh hoặc cảm biến tốt đã hiệu chỉnh (bạn phải làm việc này thường xuyên)
- Kiểm tra phạm vi của máy phát.
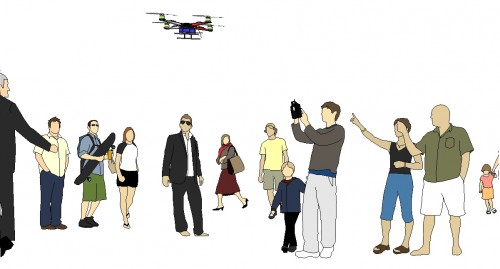
- Đảm bảo khu vực bay hoàn toàn thông thoáng và nếu có ai ở trong đó, hãy báo cho họ biết, đặc biệt là những đứa trẻ tò mò; rằng bạn đang bay UAV và bạn không nên đến gần cho đến khi máy bay không người lái hạ cánh với động cơ dừng hoàn toàn.

Kiểm tra
Cho đến khi bạn đủ tự tin vào khả năng của mình với tư cách là một phi công và nhà thiết kế máy bay không người lái, quy trình sau là đề xuất cho tất cả mọi người phương tiện bay không người lái trước chuyến bay đầu tiên của họ.
- Bật động cơ và đảm bảo chúng quay theo đúng hướng như được mô tả trong hướng dẫn sử dụng bộ điều khiển máy bay.
- Nâng thật chậm cần ga / cần điều khiển và đảm bảo các cánh quạt đang đẩy không khí xuống mặt đất. Sử dụng khăn giấy là một lựa chọn an toàn để kiểm tra bằng mắt.
- Di chuyển cần điều khiển / cần điều khiển Pitch về phía trước / phía sau rất cẩn thận để đảm bảo máy bay không người lái nghiêng về phía trước / phía sau một cách chính xác.
- Di chuyển rất cẩn thận Roll stick / cần điều khiển sang mỗi bên để đảm bảo máy bay không người lái phản hồi chính xác.
Nếu mục tiêu giả không hoạt động bình thường, có nhiều lý do có thể xảy ra, trong đó phổ biến nhất là:
- Một hoặc nhiều động cơ quay sai hướng.
- Bộ điều khiển chuyến bay không được lắp đặt đúng cách và thứ mà nó coi là "chuyển tiếp" khác với UAV vật lý của bạn.
- Một hoặc nhiều điểm tiếp xúc giữa bộ thu và bộ điều khiển máy bay không được kết nối đúng cách hoặc thậm chí không đúng chỗ.
- Có lẽ mọi thứ được thiết lập chính xác, chỉ là quá nhanh hoặc quá đột ngột để phản hồi thông tin đầu vào của người dùng.
Kế hoạch khẩn cấp
mới bắt đầu hoạt động trên thực địa và / hoặc với một máy bay không người lái mới. Danh sách dưới đây nhằm cung cấp cho bạn những điều cần suy nghĩ và một số ý tưởng về cách và lý do, để đáp ứng các phi công đầy tham vọng. Quyết định được đưa ra theo từng trường hợp cụ thể và trong một số trường hợp, nó có thể mâu thuẫn với những gì được đề xuất ở đây. Vì vậy, hãy tìm hiểu bản thân, nhận biết môi trường xung quanh và cẩn thận! Trong hầu hết mọi trường hợp, thà mất máy bay không người lái còn hơn rủi ro va chạm với người hoặc tài sản.
Máy bay không người lái ở rất xa và bạn không biết nó đang ở hướng nào.
- Giảm ga và quan sát xem mục tiêu giả có phản hồi hay không (kiểm tra xem có kết nối không).
- Nếu máy bay không người lái phản ứng với khí, hãy thử hạ cánh ngay tại đó (nếu bạn có thể).
- Nếu vị trí này không thích hợp để hạ cánh, hãy cẩn thận cố gắng hướng máy bay không người lái về phía trước (không có gì quyết liệt) và nếu máy bay không người lái phản ứng bằng cách dựa vào vị trí của bạn, di chuyển sang trái hoặc phải trên bầu trời sẽ cho phép bạn xác định định hướng của nó. Nếu nó dường như không di chuyển sang trái hoặc phải, nó có thể đang di chuyển về phía bạn hoặc xa bạn, vì vậy hãy hoàn tác những gì bạn vừa làm và thử quét sang trái.
Máy bay không người lái đột nhiên đi chệch hướng (có hoặc không có lý do).
- Nếu bạn không thành thạo trong việc lái thử (để cố gắng khôi phục nó), hãy nhả hết ga và thả ga: trong trường hợp này, việc suy tính hành động triệt để có thể dẫn đến việc bạn bị mất thị lực. của máy bay không người lái hoặc thậm chí tệ hơn, máy bay không người lái sẽ bắt đầu leo lên để rơi từ một khoảng cách xa hơn.
Máy bay không người lái đang di chuyển nhanh chóng về phía con người.
- Khí đạt cực đại để nó tăng độ cao và bay qua chúng; máy bay không người lái của bạn có thể sẽ vẫn ở đúng định hướng chung, vì vậy, thà mất máy bay không người lái còn hơn bay vào người.
- Sau khi đạt đến độ cao tối ưu, cố gắng giành lại quyền kiểm soát, sau đó định vị sao cho nó ở trên khu vực hạ cánh rõ ràng.
Máy bay không người lái đang di chuyển nhanh chóng về phía bạn.
- Khí bằng không; hãy để nó húc đất, còn hơn bay vào đầu bạn.
Máy bay không người lái không phản hồi đầu vào từ thiết bị điều khiển.
- Trong trường hợp đó, bạn không thể làm gì được. Nếu máy bay không người lái của bạn vẫn ở trên không, pin điều khiển từ xa của bạn có thể đã hết.
Máy bay không người lái mất cánh quạt.
- Mất chân vịt ảnh hưởng đến cả lực đẩy và sức giật; cố gắng kéo thẳng cần ga trước (có thể bạn cần phải giữ cần / cần điều khiển kết nối với ngàm, ở vị trí cao nhất), và đồng thời cẩn thận di chuyển cần ga / cần ga lên để tránh va chạm, sau đó giảm ga xuống..
Chuyến bay đầu tiên
Bất kể kinh nghiệm bay trước đây của bạn là gì, chuyến bay đầu tiên của bạn, đặc biệt là với một UAV nhiều động cơ tùy chỉnh, nên càng kín đáo càng tốt. Mục đích của chuyến bay đầu tiên là đảm bảo mọi thứ được thiết lập chính xác; cũng như xác định bất kỳ vấn đề nghiêm trọng nào.
- Vị trí: khu vực thoáng đãng, cách xa các tòa nhà, người và tài sản. Ví dụ: một sân bóng đá trống, sân bóng chày, v.v. sẽ là lý tưởng. Không có bất kỳ cơn gió nào cả.
- Xem qua danh sách kiểm tra trước khi bay của phi công.
- Đứng cách mục tiêu giả khoảng 2 mét với mặt trước của máy bay không người lái quay mặt ra xa bạn.
- Trang bị động cơ.
- Nhẹ nhàng di chuyển cần ga / cần điều khiển lên. Tiếp cận điểm mà máy bay không người lái đã sẵn sàng cất cánh. Có thể có một số tác động mặt đất khiến máy bay không người lái nảy nhẹ, nhưng đừng lo lắng.
- Thêm bướm ga để đưa máy bay không người lái lên khỏi mặt đất và làm quen với các điều khiển - cố gắng giữ nó trong một bán kính nhất định và xem nó phản ứng như thế nào với các chuyển động của gậy / cần điều khiển của bạn.
- Thực hiện các chuyển động nhỏ, dần dần và uyển chuyển - không có gì quá đột ngột. Hạ cần ga để tránh xảy ra tai nạn.
- Nếu máy bay không người lái của bạn không hoạt động như mong đợi (ví dụ: di chuyển trục "Pitch" dẫn đến cao độ của nó, cũng như lăn sang trái hoặc phải), có điều gì đó không ổn và bạn sẽ phải tìm ra nguyên nhân của các vấn đề đã được xác định...
- Nếu mục tiêu giả hoạt động như mong đợi, nhiệm vụ của bạn là giữ ổn định vị trí của nó ở độ cao 1,2-2 mét tính từ mặt đất. Đừng nổi điên quá nhanh.


.Các chuyến bay bổ sung
Bây giờ bạn đã khắc phục sự cố và bay thoải mái trong một môi trường được kiểm soát, bạn có thể tiếp tục chuyến bay thứ hai.
- Vì máy bay không người lái vẫn chưa được thử nghiệm đầy đủ, chúng tôi khuyên bạn nên thực hiện đầy đủ thủ tục trước chuyến bay cho chuyến bay đầu tiên, việc này sẽ không mất nhiều thời gian.
- Sử dụng các chuyển động nhịp nhàng, hãy làm quen với cách máy bay không người lái phản ứng với chuyển động của gậy / gậy của bạn bằng cách giữ nó ở một khoảng cách an toàn.
- Việc thích ứng với việc lái máy bay không người lái nên được thực hiện mà không cần sự trợ giúp của FPV và các cảm biến khác nhau.







