Nội dung
- Tự làm máy bay không người lái: Bài 1. Thuật ngữ.
- Máy bay không người lái do-it-yourself: Bài 2. Khung.
- Máy bay không người lái do-it-yourself: Bài 3. Nhà máy điện.
- Máy bay không người lái do-it-yourself: Bài 4. Bộ điều khiển máy bay.
- Máy bay không người lái do-it-yourself: Bài 5. Lắp ráp.
- Máy bay không người lái tự làm: Bài 6. Kiểm tra hiệu suất.
- Máy bay không người lái do-it-yourself: Bài 7. FPV và khoảng cách.
- Drone bằng tay của chính bạn: Bài 8. Máy bay.
Giới thiệu
Vì vậy, trước khi bạn bắt đầu lắp ráp máy bay không người lái, bước đầu tiên là chọn khung. Bạn có thể tự thực hiện, hoặc sử dụng các giải pháp làm sẵn (bộ khung UAV). Như bạn có thể nhận thấy, các loại khung và cấu hình khác nhau có thể được sử dụng để tạo ra các UAV nhiều cánh quạt. Vì vậy, trong phần này chúng ta sẽ xem xét các loại khung phổ biến hoặc cơ bản, vật liệu thực hiện, cũng như các vấn đề liên quan đến thiết kế.
Các loại khung UAV
Khung tam giác
- Mô tả: UAV, có ba chùm tia, mỗi chùm được kết nối với một động cơ. Phần phía trước của tricopter được coi là mặt bên của đường giao nhau của hai chùm (Y3). Góc giữa các chùm tia có thể khác nhau, nhưng thường là 120 °. Để chống lại hiệu ứng con quay hồi chuyển của số lượng rôto không đồng đều, cũng như thay đổi góc lái, động cơ phía sau phải có khả năng quay (đạt được bằng cách lắp đặt động cơ servo RC thông thường). Để loại trừ việc sử dụng một servo khỏi cụm, hãy sử dụng thiết kế Y4
- Ưu điểm: Hình dáng khác thường của máy bay không người lái. Nó đạt được các đặc tính bay tốt nhất khi bay theo hướng về phía trước. Giá (yêu cầu ít động cơ và ESC hơn để xây dựng).
- Nhược điểm: Thiết kế không đối xứng. Yêu cầu sử dụng ổ đĩa servo. Khó khăn trong việc thực hiện dầm sau (vì servo phải được lắp dọc theo trục). Không phải tất cả các bộ điều khiển máy bay đều hỗ trợ cấu hình này.

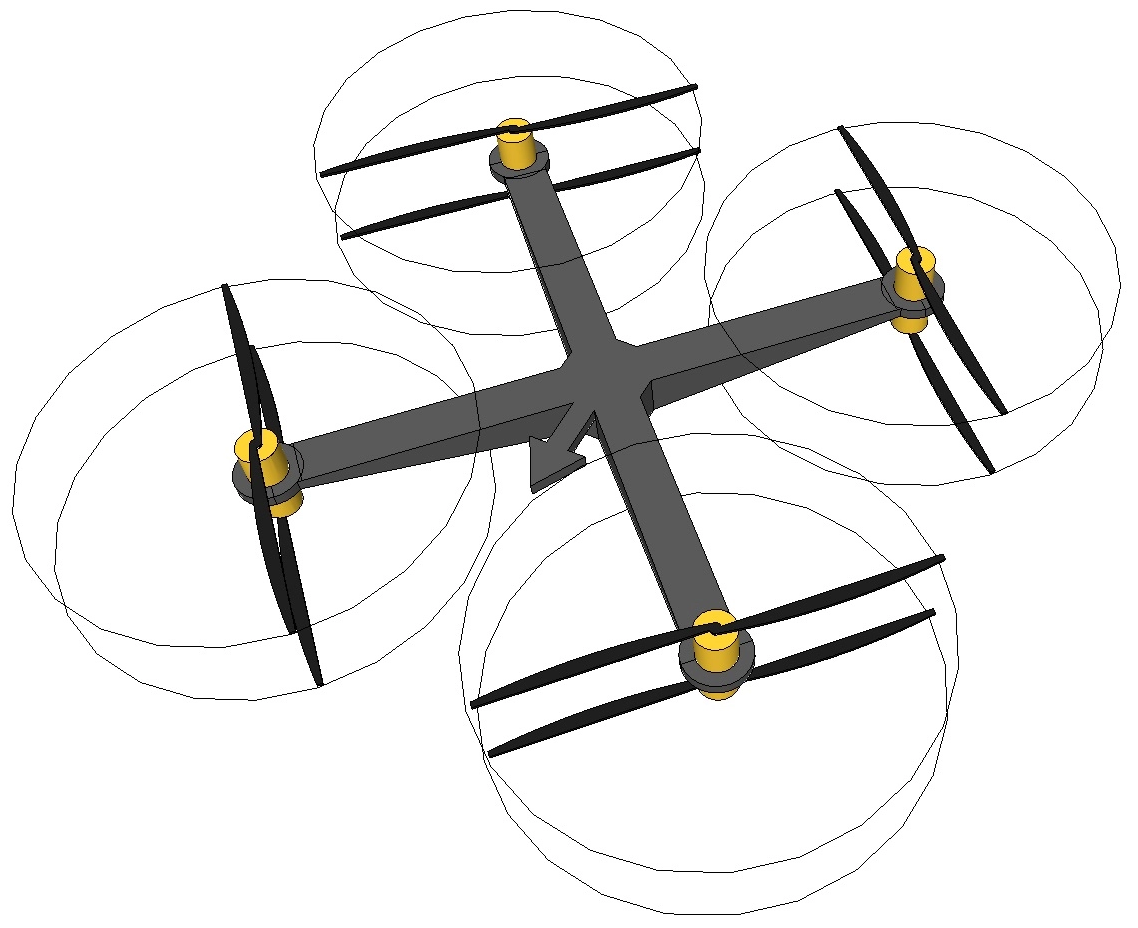
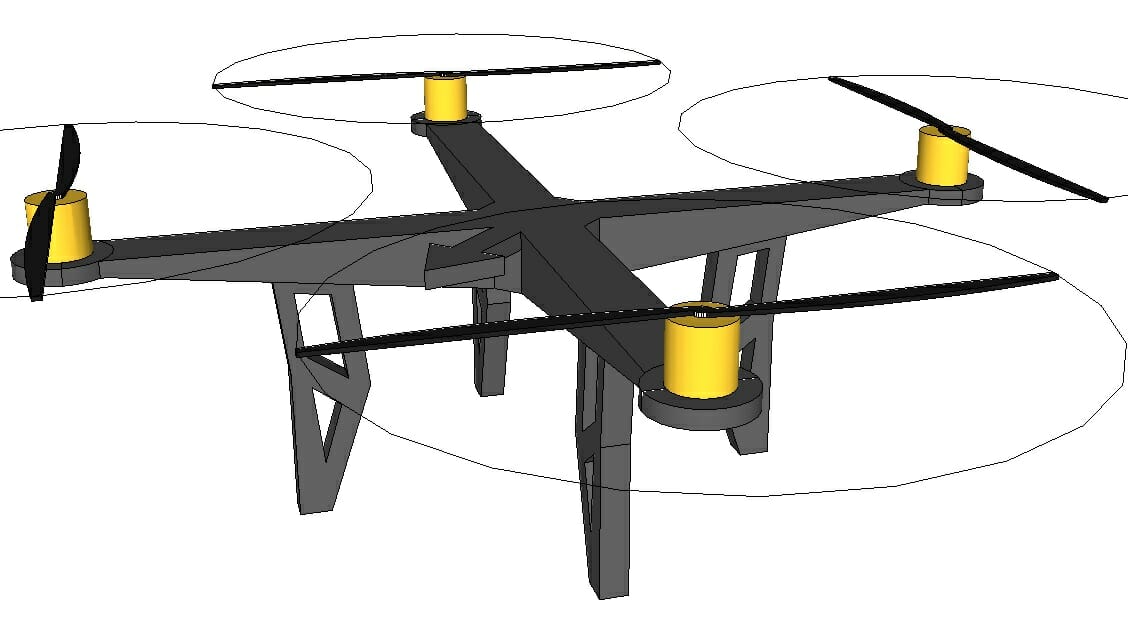
Quadcopter
- Mô tả: Máy bay không người lái "Quadcopter" có bốn chùm tia, mỗi trong số đó được kết nối với một động cơ. Đối với cấu hình " Xcấu hình
- Ưu điểm: Thiết kế nhiều rôto phổ biến nhất. Thiết kế đơn giản và linh hoạt nhất. Trong cấu hình tiêu chuẩn, các cánh tay / động cơ đối xứng về hai trục. Tất cả các bộ điều khiển bay hiện có trên thị trường đều có thể hoạt động với cụm nhiều cánh quạt này.
- Nhược điểm: Thiếu khả năng dự phòng (nếu hệ thống bị lỗi, đặc biệt là trong các phần tử của nhà máy điện, drone rơi).

Hexacopter
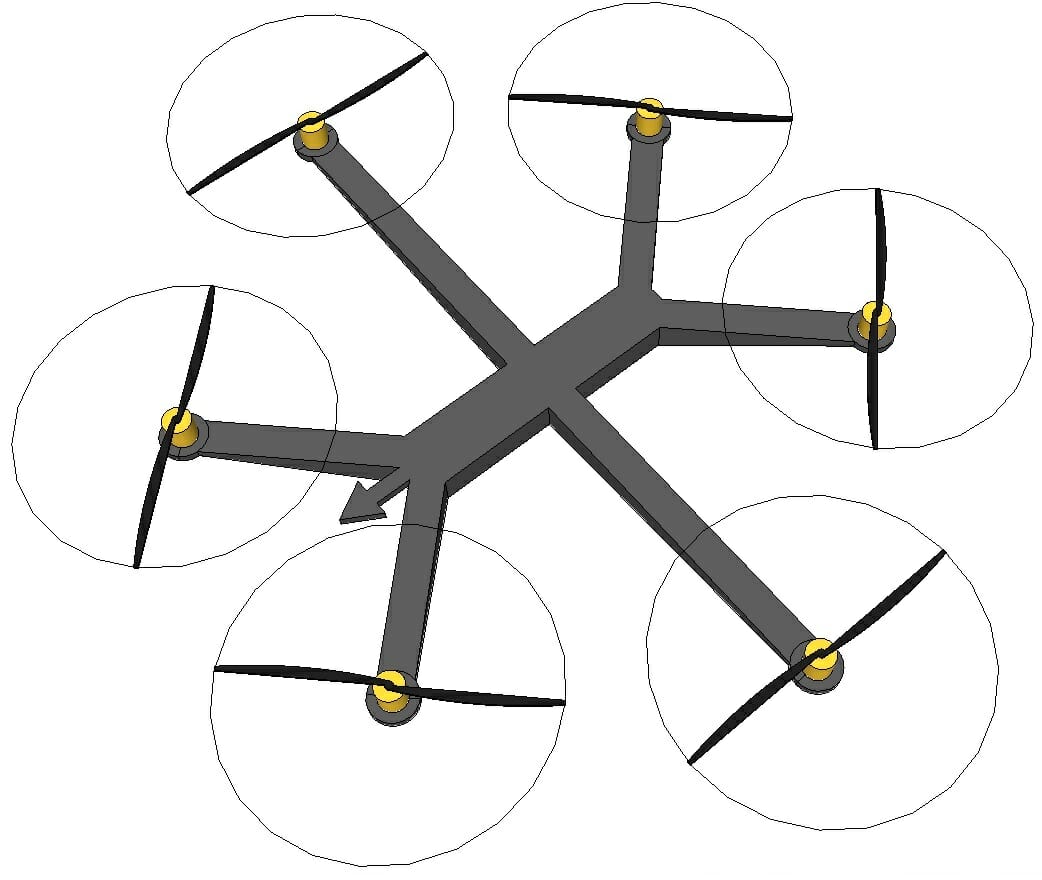
- Mô tả: Hexacopter có sáu chùm tia, mỗi chùm được kết nối với động cơ. Phần trước của lục giác được coi là mặt bên của đường giao nhau của hai dầm, nhưng dầm dọc cũng có thể được coi là phần phía trước.
- Ưu điểm: Nếu cần thiết, thiết kế hexacopter cho phép dễ dàng bổ sung thêm hai dầm và động cơ bổ sung, điều này sẽ làm tăng tổng lực đẩy, do đó máy bay không người lái có thể nâng nhiều trọng tải hơn. Trong trường hợp một trong các động cơ bị hỏng, máy bay không người lái có thể hạ cánh nhẹ nhàng và không bị rơi. Thiết kế khung mô-đun. Hầu như tất cả các bộ điều khiển chuyến bay đều hỗ trợ cấu hình này.
- Nhược điểm: Kết cấu cồng kềnh và tốn kém. Các động cơ và bộ phận bổ sung làm tăng trọng lượng của copter, do đó, để có được thời lượng bay tương tự như quadcopter, cần phải lắp thêm pin dung lượng lớn hơn.
Y6
- Mô tả: Cấu tạo Y6 là một loại máy đo hexacopter với ở chân đế, không phải sáu chùm mà là ba, mỗi chùm được kết nối với một cặp động cơ được gắn đồng trục (tổng cộng có 6 động cơ). Cần lưu ý rằng các cánh quạt phía dưới phóng lực đẩy xuống.
- Ưu điểm: Ít thành phần hơn so với hexacopter. Nâng nhiều trọng tải hơn so với quadcopter. Khi sử dụng vít quay ngược chiều, hiệu ứng con quay hồi chuyển bị loại trừ, như trong Y3
- Nhược điểm: Đắt hơn so với quadrocopter do sử dụng các bộ phận bổ sung có giá thành tương đương với bộ phận hexacopter. Các động cơ và bộ phận bổ sung làm tăng trọng lượng của máy photocopy, có nghĩa là để có được thời gian bay tương tự như máy bay quadcopter, bạn sẽ cần sử dụng pin lớn hơn. Như thực tế cho thấy, lực đẩy thu được trên Y6 thấp hơn một chút so với lực đẩy của một máy lục giác thông thường, có thể là do rôto phía dưới ảnh hưởng đến lực đẩy của rôto phía trên. Không phải tất cả các bộ điều khiển máy bay đều hỗ trợ cấu hình này.

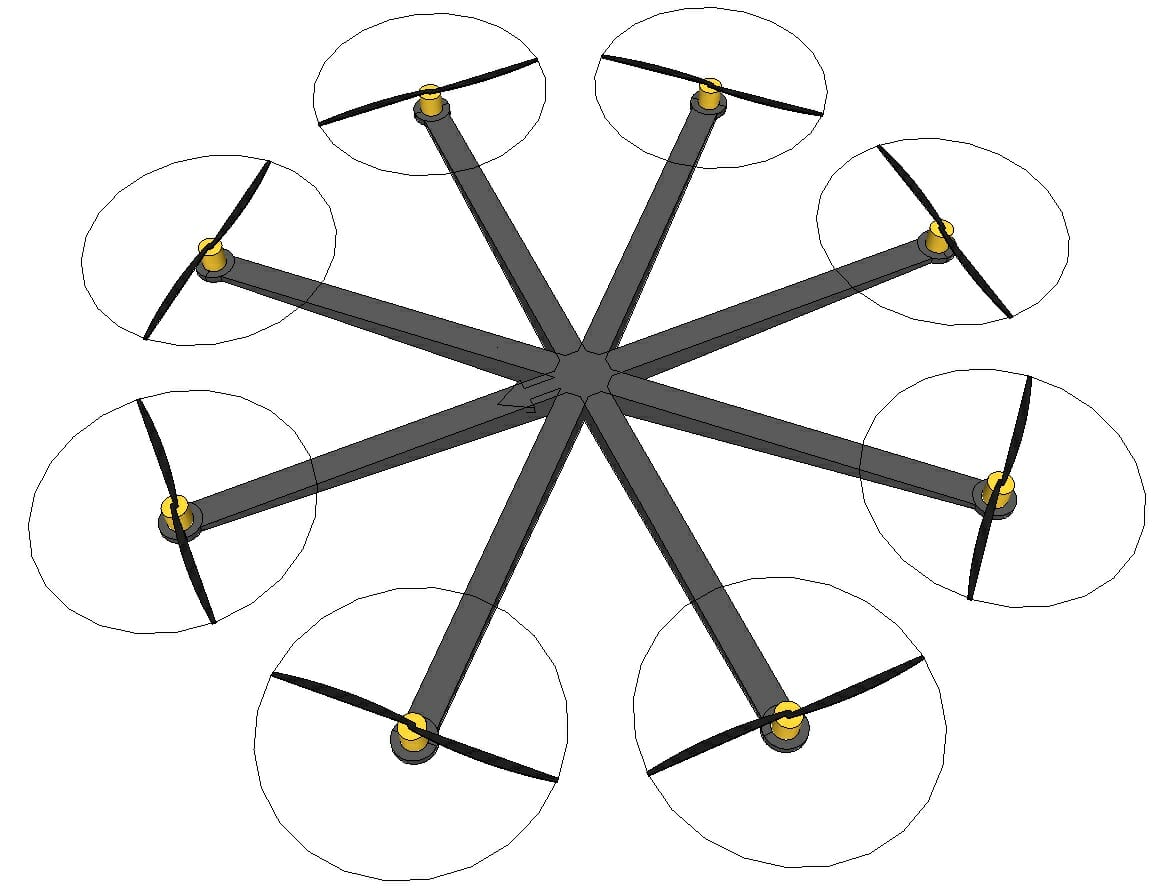
Octocopter
- Mô tả: Octocopter có tám chùm, mỗi chùm kết nối với động cơ. Phần trước của lục giác được coi là mặt bên của đường giao nhau của hai chùm tia.
- Ưu điểm: Nhiều động cơ hơn = nhiều lực đẩy hơn và do đó tăng khả năng dự phòng, cho phép máy bay không người lái tự tin điều hướng với các máy ảnh DSLR nặng và đắt tiền.
- Nhược điểm: Nhiều động cơ hơn = giá cao hơn và pin lớn hơn. Do chi phí cao, nó chỉ phù hợp với lĩnh vực chuyên nghiệp.
X8
- Mô tả: Thiết kế của X8 vẫn là một máy tám, không chỉ với tám, mà với bốn chùm, mỗi chùm được kết nối với một cặp động cơ được gắn đồng trục (tổng cộng 8 động cơ).
- Ưu điểm: Nhiều động cơ hơn = nhiều lực đẩy hơn, và do đó tăng khả năng dự phòng. Nhiều khả năng hạ cánh máy bay không người lái một cách nhẹ nhàng trong trường hợp động cơ bị hỏng.
- Nhược điểm: Nhiều động cơ hơn = giá cao hơn và pin lớn hơn. Do chi phí cao, nó chỉ phù hợp với lĩnh vực hoạt động chuyên nghiệp.
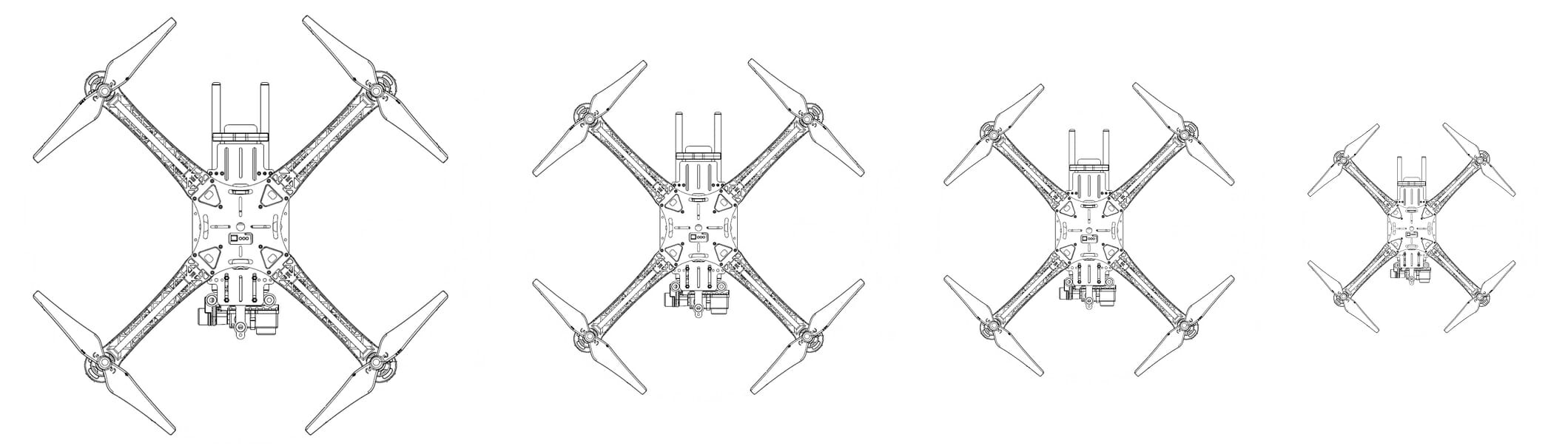
Kích thước UAV
UAV có nhiều kích cỡ khác nhau, từ Nano, nhỏ hơn lòng bàn tay bàn tay của bạn, cho cái lớn hơn, mà chỉ có thể được vận chuyển ở phía sau của một chiếc xe tải. Đối với hầu hết người dùng mới bắt đầu với sở thích bay không người lái, phạm vi kích thước tối ưu mang lại tính linh hoạt và giá trị lớn nhất là từ 350mm đến 700mm. Kích thước khung là đường kính của vòng tròn lớn nhất đi qua mỗi động cơ. Các bộ phận của UAV cỡ này có nhiều mức giá và sự lựa chọn sản phẩm lớn nhất hiện có.
Vật liệu của UAV / Cấu tạo
Dưới đây là các vật liệu thực thi phổ biến nhất được sử dụng để sản xuất khung cho máy bay không người lái nhiều cánh quạt, tương ứng, danh sách không đầy đủ. Lý tưởng nhất là khung phải cứng với khả năng truyền rung động ít nhất.
Cao su bọt (Foam) - là vật liệu duy nhất để sản xuất khung UAV hiếm khi được sử dụng, và theo quy luật, khi kết hợp với khung cứng hoặc kết cấu gia cố. Cũng có thể được sử dụng cho các mục đích chiến lược; làm lớp bảo vệ cánh quạt (cánh quạt), khung gầm, thường đóng vai trò như một van điều tiết. Cao su bọt có thể có nhiều loại khác nhau từ mềm đến tương đối cứng.

Gỗ - nếu ưu tiên là giá rẻ của cấu trúc, thì gỗ là một lựa chọn tuyệt vời sẽ làm giảm đáng kể thời gian lắp ráp và sản xuất phụ tùng. Gỗ khá cứng và là vật liệu đã qua kiểm nghiệm thời gian. Điều quan trọng là gỗ thẳng hoàn toàn được sử dụng trong sản xuất khung (không bị uốn cong và biến dạng).

Nhựa - chỉ có sẵn cho hầu hết người dùng ở dạng tấm nhựa. Có xu hướng uốn cong và như vậy là không lý tưởng. Tuyệt vời để làm lồng cuộn hoặc khung xe. Nếu bạn đang cân nhắc việc in 3D, bạn nên xem xét khoảng thời gian sản xuất (có thể dễ dàng hơn để mua một bộ khung UAV). Việc in 3D các bộ phận đã hoạt động tốt đối với các máy bay quadcopter nhỏ.

Nhôm - đến tay người tiêu dùng với nhiều hình dạng và kích cỡ khác nhau. Bạn có thể sử dụng nhôm tấm cho thân máy hoặc nhôm ép đùn cho các chùm máy bay không người lái. Nhôm không nhẹ như sợi carbon hoặc G10, nhưng giá cả và độ bền là những ưu điểm chính của vật liệu này. Thay vì vỡ hoặc nứt, nhôm có xu hướng bị uốn cong. Để làm việc với vật liệu, chỉ cần một cái cưa và một cái khoan.
G10 (một loại sợi thủy tinh) - mặc dù thực tế là sự xuất hiện và các tính chất cơ bản gần như giống với carbon (sợi carbon) là một vật liệu ít tốn kém hơn. Nó chủ yếu có sẵn ở định dạng tấm và được sử dụng để nhận ra các tấm khung trên và dưới. Cũng không giống như sợi carbon, G10 không chặn sóng RF.
PCB (Bảng mạch in - tấm điện môi) - trên thực tế là một chất tương tự của sợi thủy tinh, nhưng không giống như loại sau, chúng luôn luôn phẳng. Đôi khi được sử dụng làm tấm khung trên và dưới để giảm số lượng các bộ phận được sử dụng (ví dụ, một bảng phân phối điện thường được tích hợp vào bảng phía dưới). Khung nanobảng mạch in
Sợi carbon là vật liệu được săn lùng nhiều nhất do trọng lượng nhẹ và độ bền cao. Quá trình sản xuất vẫn hoàn toàn là thủ công. Theo quy định, các dạng đơn giản được sản xuất hàng loạt, chẳng hạn như tấm phẳng, các thành phần hình ống; việc thực hiện các hình dạng ba chiều phức tạp được thực hiện theo đơn đặt hàng.
Cân nhắc bổ sung
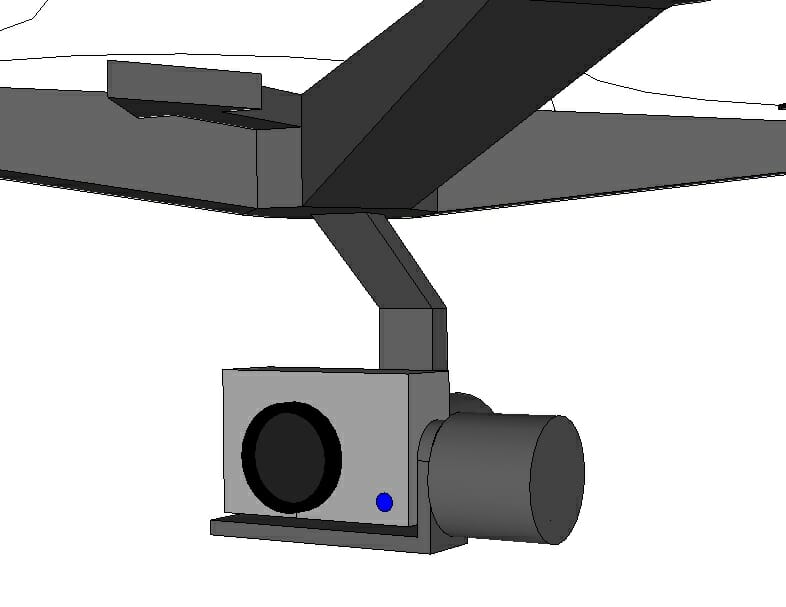
- Gimbal - thường được sử dụng nhất để ổn định máy ảnh (FPV / Chụp ảnh trên không). Theo quy định, nó được lắp đặt dưới khung phù hợp với trọng tâm của UAV. Có thể được gắn trực tiếp vào khung hoặc bằng các phương tiện của đường ray. Để ổn định hình ảnh, bạn nên sử dụng gimbal hai hoặc ba trục. Yêu cầu tăng chiều dài của chân tiếp đất.
- Tải trọng (vận tải) - trong lĩnh vực nghiệp dư là một thứ gì đó xa xỉ, vậy làm thế nào bất kỳ trọng lượng bổ sung nào không chỉ làm giảm thời gian bay mà còn dẫn đến việc từ chối sử dụng các yếu tố bổ sung có thể bổ sung các chức năng chính cho máy bay không người lái. Khi thiết kế, cần hiểu rằng trường hợp vận chuyển phải nhẹ nhất có thể và đồng thời chắc chắn, và bản thân hàng hóa phải được gắn chặt, không bao gồm bất kỳ chuyển động nào trong chuyến bay.

- Chân hạ cánh - mặc dù thực tế là một số UAV hạ cánh trực tiếp trên khung hình (thường là loại trừ để giảm trọng lượng), việc sử dụng giá đỡ hạ cánh trong thiết kế sẽ tạo ra khoảng trống giữa phần dưới của UAV và bề mặt không bằng phẳng, và cũng trong trường hợp hạ cánh khó, chúng sẽ bị giáng một đòn, tăng cơ hội cứu được. các yếu tố quan trọng của máy bay không người lái như máy ảnh, hệ thống treo, pin và khung.
- Cài đặt - mặc dù thực tế là việc thiết kế và sản xuất máy bay không người lái dễ dàng hơn nhiều so với một máy bay trực thăng thông thường, vị trí của mỗi phần tử cần được xem xét ngay từ đầu của quá trình thiết kế.
Hướng dẫn lắp đặt chung:
- Khi tạo khung từ đầu, điều quan trọng là đảm bảo vị trí chính xác của bốn lỗ lắp mà qua đó động cơ được gắn vào khung...
- Hầu hết các động cơ cho khung từ 400mm đến 600mm có cùng một mẫu lỗ lắp ghép, cho phép sử dụng khung của một nhà sản xuất và động cơ từ nhà sản xuất khác.
- Vị trí của tất cả các bộ phận bổ sung lý tưởng nên đối xứng về một trục, điều này sau này sẽ giúp tạo điều kiện thuận lợi cho việc tìm kiếm và điều chỉnh khối tâm của máy bay không người lái.
- Tốt nhất, bộ điều khiển bay nên được đặt ở tâm của vòng tròn (và như vậy ở tâm khối lượng) kết nối tất cả các động cơ.
- Bộ điều khiển chuyến bay thường được gắn vào khung bằng thanh chống, bộ giảm chấn cao su hoặc băng dính hai mặt.
- Nhiều nhà sản xuất sử dụng cùng một mẫu lỗ lắp cho bộ điều khiển bay (ví dụ: hình vuông 35mm hoặc 45mm), nhưng không có “tiêu chuẩn công nghiệp” hiện hành.
- Pin đủ nặng và nếu khối tâm của cụm máy của bạn bị xê dịch một chút, bạn có thể điều chỉnh nó bằng cách di chuyển pin một chút.
- Đảm bảo rằng giá lắp pin sẽ phát ra một chút, nhưng đồng thời đảm bảo rằng pin được giữ chắc chắn ở vị trí.
- Dây đai khóa dán thường được sử dụng để cố định pin, tuy nhiên, bạn nên thêm băng dính hai mặt giữa pin và khung.

Nguyên tắc
Bước 1: Xem bạn có sẵn nguyên liệu và dụng cụ nào để chế biến chúng hay không.
- Nếu kho khả năng của bạn không đủ để thực hiện một khung tùy chỉnh hoặc bạn chỉ muốn một khung chuyên nghiệp, hãy cân nhắc mua một bộ khung UAV.
- Ngay cả khi khung được tạo ra bằng cách sử dụng các công cụ và vật liệu cơ bản chính xác, nó vẫn có thể có các điểm yếu về cấu trúc gây ra rung động hoặc dịch chuyển quá mức. Quá trình sản xuất đòi hỏi thị lực và kinh nghiệm nhạy bén.
- Khi tự làm khung, hãy nghĩ đến việc gắn chặt tất cả các yếu tố cần thiết của máy bay không người lái; động cơ, điện tử, v.v.
Bước 2: Liệt kê bất kỳ bộ phận (phụ kiện) bổ sung nào mà bạn định đưa vào lắp ráp.
- Nó có thể là gimbal một, hai hoặc ba trục cho máy ảnh, dù, máy tính mini trên bo mạch, trọng tải, thiết bị điện tử tầm xa (như một quy luật, nó làm cho bộ phận lắp ráp nặng hơn và lớn hơn), thiết bị nổi, v.v.
- Danh sách kết quả của các bộ phận bổ sung / phụ trợ sẽ cung cấp ý tưởng về kích thước của máy bay không người lái và tính toán tổng khối lượng.
Bước 3: Suy nghĩ về kích thước khung hình ước tính.
- Khung lớn không nhất thiết là tiềm năng lớn cho máy bay không người lái, và khung nhỏ hơn có thể không làm cho việc lắp ráp rẻ hơn.
- Máy bay không người lái được chế tạo trên kích thước khung 400 - 600mm được khuyến nghị cho người mới bắt đầu.
.Bước 4: Thiết kế, xây dựng và thử nghiệm khung.
- Nếu bạn đã mua bộ khung UAV, thì bạn không có gì phải lo lắng về sức mạnh, độ cứng và kết cấu.
- Nếu bạn quyết định thiết kế và xây dựng khung từ đầu, điều quan trọng là phải kiểm tra độ bền, trọng lượng và đảm bảo kết cấu có thể chịu được rung động (uốn cong tối thiểu).
- Cân nhắc sử dụng phần mềm mô hình hóa chuyên dụng (nhiều phần mềm miễn phí, chẳng hạn như Google Sketchup) để thiết kế khung và đảm bảo kích thước chính xác.
Bây giờ bạn đã có khung và bạn có thể chuyển sang bài học tiếp theo.







