Nội dung
- Tự làm máy bay không người lái: Bài 1. Thuật ngữ.
- Máy bay không người lái do-it-yourself: Bài 2. Khung.
- Máy bay không người lái do-it-yourself: Bài 3. Nhà máy điện.
- Máy bay không người lái do-it-yourself: Bài 4. Bộ điều khiển máy bay.
- Máy bay không người lái do-it-yourself: Bài 5. Lắp ráp.
- Máy bay không người lái tự làm: Bài 6. Kiểm tra hiệu suất.
- Máy bay không người lái tự làm: Bài 7. FPV và khoảng cách.
- Drone bằng tay của chính bạn: Bài 8. Máy bay.
Giới thiệu
Bây giờ bạn đã chọn hoặc xây dựng khung, bước tiếp theo là chọn đúng hệ thống truyền lực. Vì hầu hết các máy bay không người lái hiện có đều chạy bằng điện, chúng tôi sẽ tập trung vào việc tạo ra động cơ đẩy hoàn toàn bằng điện thông qua động cơ DC không chổi than. Nhà máy điện bao gồm động cơ, rôto (cánh quạt, viết tắt là đạo cụ), ESC và pin lưu trữ.
1. Động cơ
Từ động cơ bạn sử dụng trong bộ phận lắp ráp của mình, nó sẽ phụ thuộc vào tải trọng tối đa mà máy bay không người lái có thể nâng, cũng như thời gian bay của nó. Nhà máy điện nhất thiết phải bao gồm các động cơ có cùng nhãn hiệu và kiểu máy, cách tiếp cận này sẽ cung cấp cho nó một hoạt động cân bằng. Cần lưu ý rằng ngay cả những động cơ (Nhãn hiệu / Kiểu máy) hoàn toàn giống hệt nhau cũng có thể có sự khác biệt nhỏ về tốc độ, sau đó sẽ được bộ điều khiển bay san bằng.
Có chổi than so với không chổi than
Trong động cơ có chổi than, rôto quấn quay bên trong stato trên đó các nam châm được cố định cứng. Trong động cơ không chổi than, mọi thứ đều hoạt động theo lượt; cuộn dây được cố định cứng vào bên trong stato, và các nam châm được gắn trên trục và quay. Trong hầu hết các trường hợp, bạn sẽ chỉ xem xét động cơ DC không chổi than (BC). Động cơ loại này được sử dụng rộng rãi trong ngành công nghiệp vô tuyến nghiệp dư để lắp ráp các sản phẩm khác nhau, từ máy bay trực thăng, máy bay đến các hệ thống truyền động trong ô tô và tàu thuyền.
Động cơ không chổi than pancake có đường kính lớn hơn, phẳng hơn và thường có mô-men xoắn cao và KV thấp hơn (chi tiết bên dưới). Các UAV cỡ nhỏ (thường bằng lòng bàn tay) thường sử dụng động cơ chổi nhỏ do giá thành rẻ hơn và bộ điều khiển hai dây đơn giản. Trong khi động cơ không chổi than có nhiều kích thước và thông số kỹ thuật khác nhau, việc chọn kích thước nhỏ hơn không có nghĩa là nó sẽ rẻ hơn.

Inrunner vs Outrunner
Có một số loại động cơ DC không chổi than:
- Inrunner là một rôto bên trong. Dây quấn được gắn cố định vào stato, các nam châm gắn trên trục rôto quay (thường dùng trên thuyền RC, trực thăng và ô tô do KV cao).
- Outrunner - rôto ngoài. Các nam châm được cố định vào một stato quay quanh một cuộn dây đứng yên. Phần dưới của động cơ được cố định.(theo quy luật, động cơ loại này có nhiều mô-men xoắn hơn).
- Hybrid Outrunner - Về mặt kỹ thuật, đây là một "Outrunner", nhưng được triển khai trong một gói "Inrunner". Cách tiếp cận này làm cho nó có thể kết hợp trong một loại mô-men xoắn "Outrunner" và không có các phần tử quay bên ngoài như trong động cơ thuộc loại "Inrunner".
KV
Xếp hạng KV - tối đa. số vòng quay mà động cơ có thể phát triển mà không bị mất công suất ở một hiệu điện thế nhất định. Đối với hầu hết các UAV nhiều cánh quạt, giá trị KV thấp (ví dụ: từ 500 đến 1000) là phù hợp, vì điều này giúp đảm bảo sự ổn định. Trong khi đối với chuyến bay nhào lộn, giá trị KV giữa 1000 và 1500 sẽ phù hợp, song song với các cánh quạt (cánh quạt) có đường kính nhỏ hơn. Giả sử giá trị KV cho một động cơ cụ thể là 650 vòng / phút, thì ở điện áp 11,1V, động cơ sẽ quay với tốc độ: 11,1 × 650 = 7215 vòng / phút và nếu bạn sử dụng động cơ ở điện áp thấp hơn (giả sử 7,4V), khi đó tốc độ quay sẽ là: 7,4 × 650 = 4810 vòng / phút. Tuy nhiên, điều quan trọng cần lưu ý là sử dụng điện áp thấp thường có nghĩa là tiêu thụ dòng điện cao hơn (Công suất = Dòng điện × Điện áp).
Lực đẩy
Một số nhà sản xuất động cơ không chổi than có thể chỉ định trong thông tin kỹ thuật về lực đẩy (Lực đẩy) tối đa có thể tạo ra bởi động cơ kết hợp với rôto chính được khuyến nghị. Đơn vị đo lực đẩy thường là kilôgam (Kg / Kg), pound (Lbs) hoặc Newton (N). Ví dụ: nếu bạn đang chế tạo một chiếc quadrocopter và bạn biết giá trị lực đẩy của một động cơ = tối đa 0,5kg trong một ngăn có rôto 11 inch, thì ở đầu ra, bốn động cơ như vậy có thể được nâng với lực đẩy tối đa: 0,5kg × 4 = 2kg. Theo đó, nếu tổng trọng lượng của chiếc quadcopter của bạn nhỏ hơn 2kg, thì với một nhà máy điện như vậy, nó sẽ chỉ cất cánh ở vòng tua tối đa (lực đẩy tối đa). Trong trường hợp này, sẽ có liên quan nếu chọn gói động cơ rôto mạnh hơn, sẽ cung cấp nhiều lực đẩy hơn hoặc giảm tổng trọng lượng của máy bay không người lái. Ở mức tối đa. lực đẩy của nhà máy điện = 2kg, trọng lượng của máy bay không người lái không được lớn hơn một nửa giá trị này (1kg, bao gồm cả trọng lượng của chính động cơ). Một phép tính tương tự có thể được thực hiện cho bất kỳ cấu hình nào. Giả sử trọng lượng của hexacopter (bao gồm khung, động cơ, thiết bị điện tử, phụ kiện, v.v.) là 2,5kg. Điều này có nghĩa là mỗi động cơ cho một tổ hợp như vậy phải cung cấp (2,5kg ÷ 6 động cơ) × 2 = 0,83kg lực đẩy (hoặc hơn). Bây giờ bạn đã biết cách tính lực đẩy tối ưu của động cơ dựa trên tổng trọng lượng, nhưng trước khi đưa ra quyết định, chúng tôi khuyên bạn nên tự làm quen với các phần bên dưới.
Cân nhắc bổ sung
- Đầu nối: Động cơ chải DC có hai đầu nối "" và "-". Thay dây ở những nơi làm thay đổi chiều quay của động cơ.
- Đầu nối: Động cơ DC không chổi than có ba đầu nối. Để tìm hiểu cách kết nối chúng, cũng như cách thay đổi hướng quay, hãy tham khảo phần ESC bên dưới.
- Cuộn dây: Các cuộn dây ảnh hưởng đến KV của động cơ. Nếu bạn cần giá trị KV thấp nhất nhưng ưu tiên cho mô-men xoắn, tốt nhất bạn nên chuyển sự chú ý sang động cơ DC không chổi than loại Pancake.
- Lắp đặt: Hầu hết các nhà sản xuất đều có sơ đồ đấu dây chung cho động cơ điện một chiều cho động cơ điện một chiều, điều này cho phép các công ty sản xuất khung tránh chế tạo cái gọi là bộ điều hợp. Khuôn mẫu thường là hệ mét, với hai lỗ cách nhau 16mm và hai lỗ nữa cách nhau 19mm (góc đầu tiên là 90 °).
- Chỉ: Chỉ lắp được sử dụng để gắn động cơ không chổi than vào khung có thể khác nhau. Kích thước hệ mét thông thường của vít là M1, M2 và M3, kích thước hệ Anh có thể là 2-56 và 4-40.
2. Cánh quạt chính (Cánh quạt)
Cánh quạt chính (cánh quạt, viết tắt là đạo cụ) cho UAV nhiều cánh quạt bắt nguồn từ cánh quạt của máy bay điều khiển bằng sóng vô tuyến. Nhiều người sẽ hỏi: tại sao không sử dụng cánh máy bay trực thăng? Mặc dù điều này đã được thực hiện, hãy tưởng tượng kích thước của một lục giác có cánh máy bay trực thăng. Cũng cần lưu ý rằng hệ thống máy bay trực thăng yêu cầu thay đổi độ cao của các cánh quạt, và điều này làm phức tạp đáng kể thiết kế.
Bạn cũng có thể hỏi tại sao không sử dụng động cơ tuốc bin phản lực, động cơ phản lực cánh quạt, động cơ phản lực cánh quạt, v.v.? Chắc chắn chúng cực kỳ giỏi trong việc cung cấp nhiều lực đẩy, nhưng chúng cũng đòi hỏi rất nhiều năng lượng. Nếu mối quan tâm hàng đầu của máy bay không người lái là di chuyển rất nhanh thay vì bay lơ lửng trong một không gian hạn chế, thì một trong những động cơ trên có thể là một lựa chọn tốt.
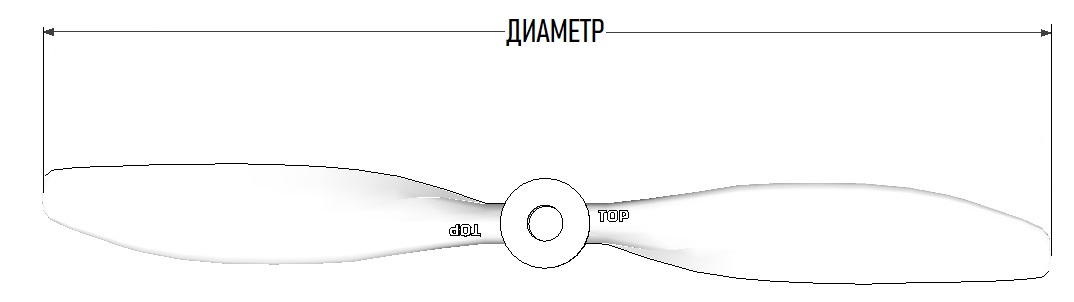
Lưỡi và đường kính
Cánh quạt chính của hầu hết các UAV nhiều cánh quạt có hai hoặc ba cánh quạt. Cánh quạt được sử dụng rộng rãi nhất là loại có hai cánh. Đừng cho rằng thêm nhiều lưỡi dao sẽ tự động tăng lực đẩy; mỗi cánh quạt hoạt động trong dòng chảy bị xáo trộn bởi cánh quạt trước đó, làm giảm hiệu quả của cánh quạt. Cánh quạt chính có đường kính nhỏ có quán tính ít hơn và do đó nó dễ dàng tăng tốc và giảm tốc hơn, điều này rất quan trọng đối với chuyến bay nhào lộn.

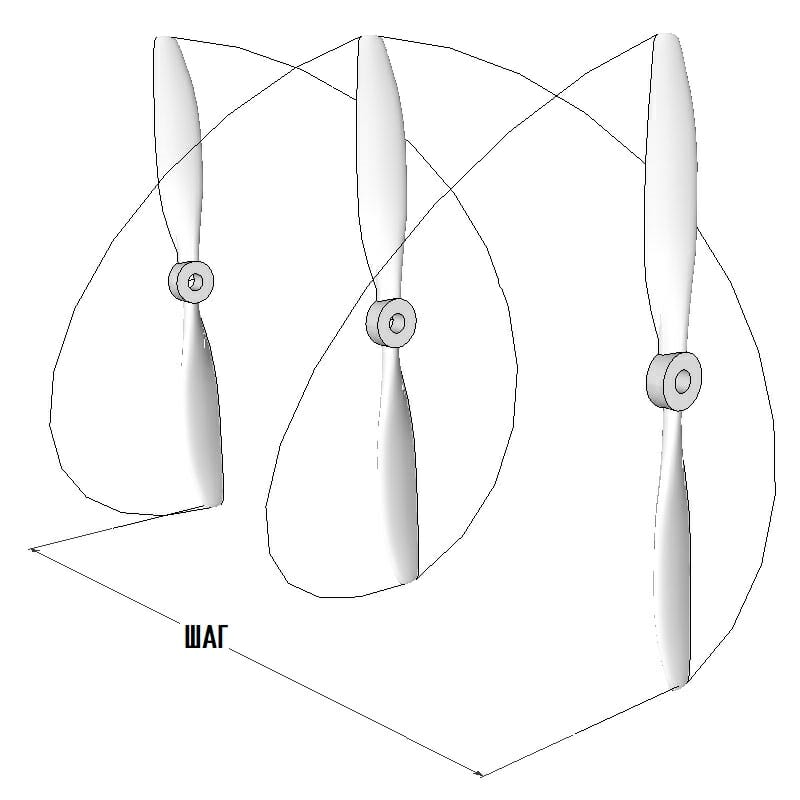
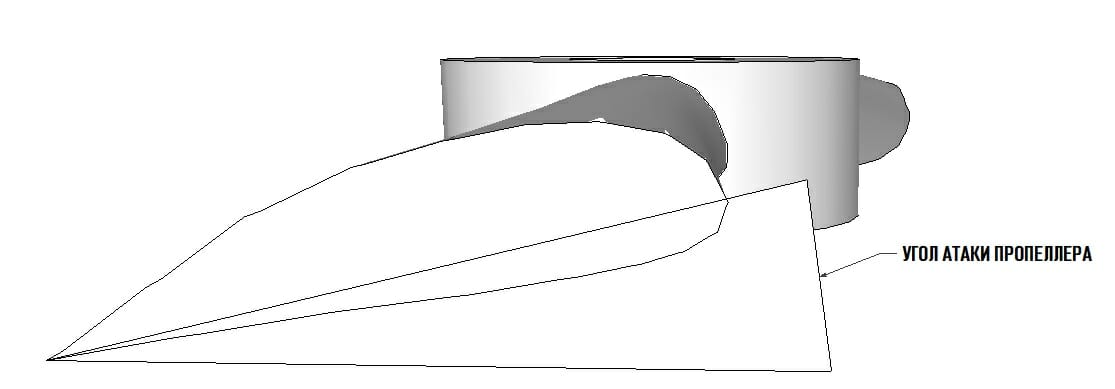
Cao độ / Góc tấn công / Hiệu quả / Lực đẩy
Lực đẩy tạo ra bởi cánh quạt chính phụ thuộc vào mật độ không khí, số vòng quay của cánh quạt, đường kính của nó, hình dạng và diện tích của các cánh, cũng như bước của nó. Hiệu quả của cánh quạt liên quan đến góc tấn, được định nghĩa là bước của lưỡi trừ đi góc xoắn (góc giữa tốc độ tương đối thu được và hướng quay của lưỡi). Bản thân hiệu suất là tỷ số giữa công suất đầu ra và công suất đầu vào. Hầu hết các cánh quạt được thiết kế tốt đều có hiệu suất hơn 80%. Góc tấn bị ảnh hưởng bởi tốc độ tương đối, vì vậy cánh quạt sẽ có hiệu suất khác nhau ở các tốc độ động cơ khác nhau. Hiệu quả cũng bị ảnh hưởng mạnh bởi cạnh đầu của cánh quạt chính, và điều rất quan trọng là nó phải càng trơn càng tốt. Mặc dù thiết kế mũi nhọn thay đổi sẽ là tốt nhất, nhưng độ phức tạp tăng thêm cần thiết so với sự đơn giản vốn có của nhiều cánh quạt có nghĩa là cánh quạt có độ cao thay đổi gần như không bao giờ được sử dụng.
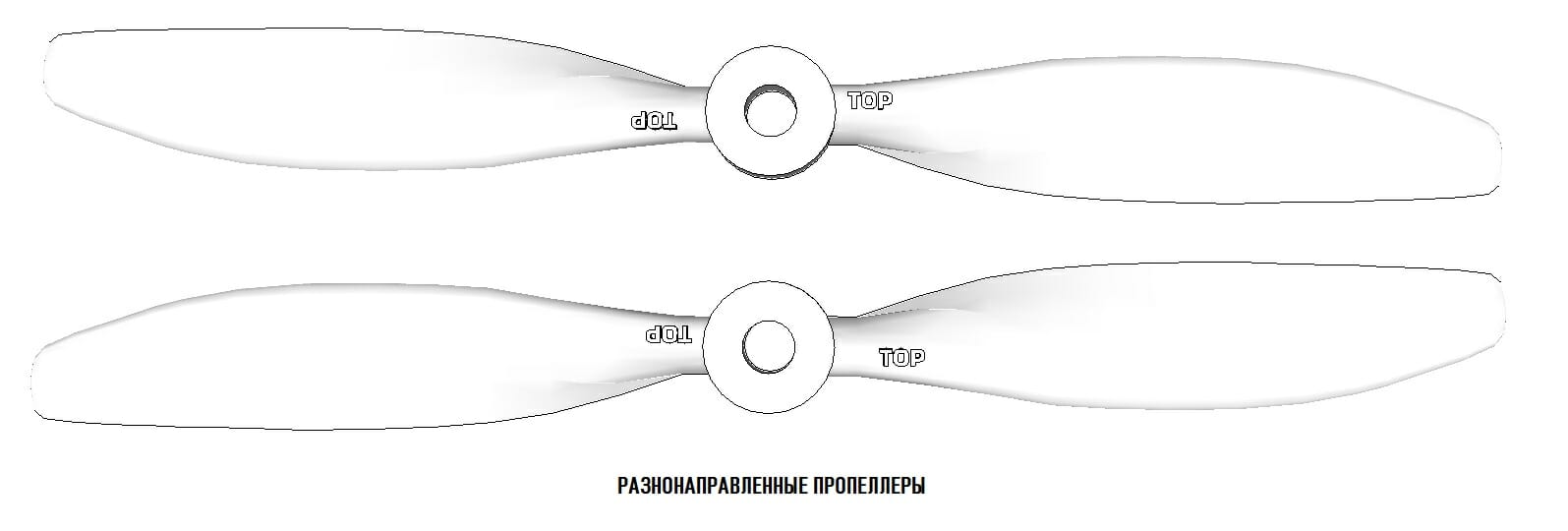
Xoay
Các rôto được thiết kế để quay theo chiều kim đồng hồ (CW) hoặc ngược chiều kim đồng hồ (CCW). Hướng quay được biểu thị bằng độ nghiêng của lưỡi cắt ( nhìn vào chân vịt từ đầu đối xứngVtailY6X8
Vật liệu thực hiện
(Các) vật liệu được sử dụng để sản xuất cánh quạt (cánh quạt) có thể có ảnh hưởng vừa phải đối với chuyến bay hiệu suất nhưng an toàn nên được ưu tiên hàng đầu, đặc biệt nếu bạn là người mới bắt đầu và chưa có kinh nghiệm.
- Nhựa (ABS / Nylon, v.v.) là lựa chọn phổ biến nhất khi nói đến UAV nhiều động cơ. Điều này phần lớn là do chi phí thấp, đặc điểm chuyến bay tốt và độ bền theo cấp số nhân. Thông thường, trong trường hợp va chạm, ít nhất một cánh quạt bị hỏng, và trong khi bạn thành thạo máy bay không người lái và học bay, bạn sẽ luôn có rất nhiều đạo cụ bị hỏng. Độ cứng và khả năng chống va đập của vít nhựa có thể được cải thiện bằng cách gia cố bằng sợi carbon (carbon), cách làm này là tối đa. hiệu quả và không quá đắt so với một cánh quạt hoàn toàn bằng sợi carbon.
- Polyme gia cố bằng sợi (sợi carbon, nylon tăng cường carbon, v.v.) - là công nghệ "tiên tiến" trong nhiều mối quan hệ. Các bộ phận bằng sợi carbon vẫn không dễ sản xuất, và do đó bạn phải trả nhiều tiền hơn cho một con vít nhựa thông thường có các thông số tương tự. Một cánh quạt làm bằng sợi carbon khó bị gãy hoặc uốn cong hơn, và do đó, nếu nó bị rơi, nó sẽ gây ra nhiều thiệt hại hơn cho bất cứ thứ gì nó tiếp xúc. Đồng thời, cánh quạt carbon nhìn chung được chế tạo tốt, cứng hơn (giảm hiệu suất tối thiểu), hiếm khi cần cân bằng và trọng lượng nhẹ hơn bất kỳ vật liệu nào khác. Chỉ nên xem xét các cánh quạt như vậy sau khi mức độ lái của người dùng trở nên thoải mái.
- Gỗ là vật liệu hiếm khi được sử dụng để sản xuất cánh quạt UAV nhiều cánh quạt, vì quá trình sản xuất chúng đòi hỏi quá trình gia công cơ khí, Điều này sau này làm cho cánh quạt bằng gỗ đắt hơn so với cánh quạt bằng nhựa. Đồng thời cây khá khỏe và không bao giờ bị uốn cong. Lưu ý rằng cánh quạt bằng gỗ vẫn được sử dụng trong máy bay điều khiển bằng sóng vô tuyến.



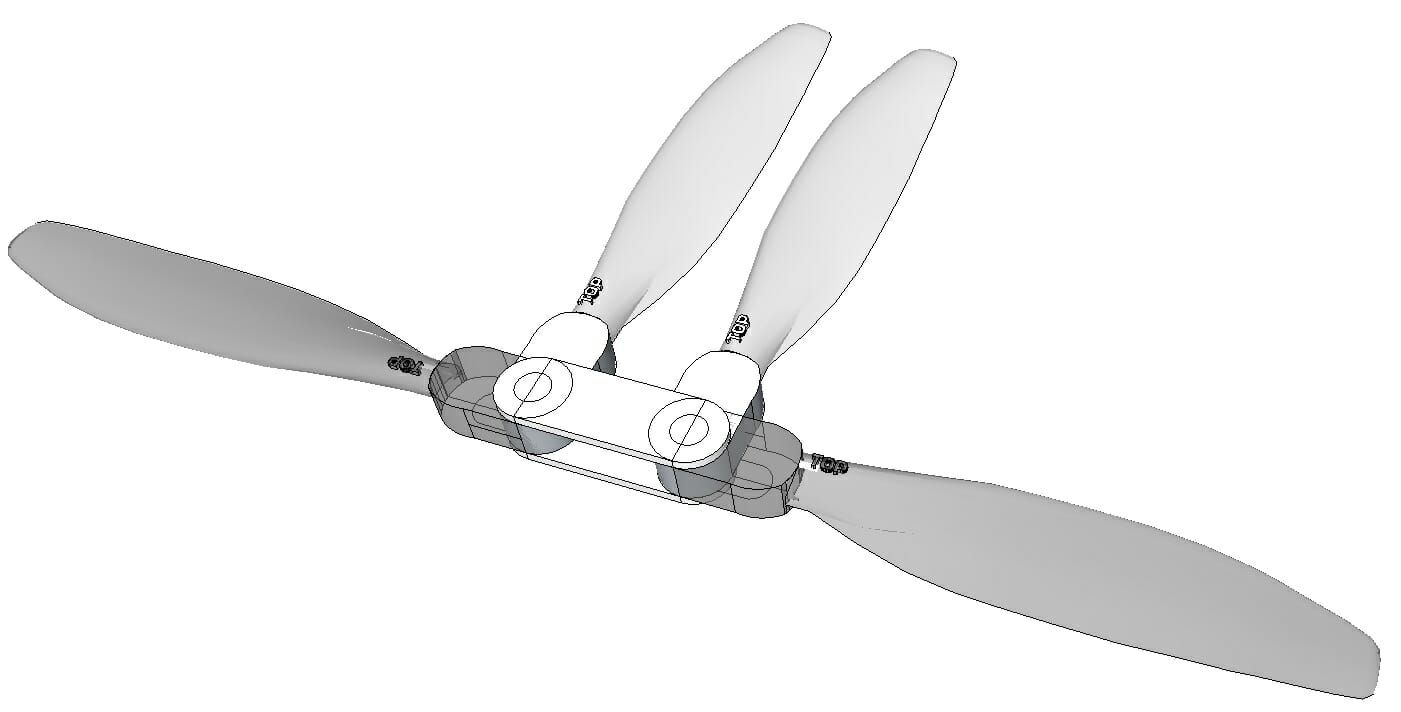
Có thể gập lại
Đạo cụ có thể gập lại có phần trung tâm kết nối với hai lưỡi xoay. Khi tâm (được nối với trục đầu ra của động cơ) quay, lực ly tâm tác động lên các cánh, đẩy chúng ra ngoài và về cơ bản làm cho cánh quạt "cứng", với tác dụng tương tự như một cánh quạt không gấp cổ điển. Do nhu cầu thấp và số lượng lớn các bộ phận cần thiết, cánh quạt gấp ít phổ biến hơn. Ưu điểm chính của đạo cụ gấp là tính nhỏ gọn, và kết hợp với khung gấp, kích thước vận chuyển của máy bay không người lái có thể nhỏ hơn đáng kể so với kích thước bay. Một ưu điểm đồng thời của cơ cấu gấp là không cần thay đổi toàn bộ cánh quạt, trong trường hợp có sự cố, chỉ cần thay thế phần lưỡi bị hỏng là đủ.
Cài đặt
Giống như UAV, cánh quạt có thể có nhiều loại kích cỡ. Do đó, có một số đường kính trục động cơ “tiêu chuẩn” trong ngành. Trong kết nối này, rôto chính thường được cung cấp một bộ nhỏ các vòng tiếp hợp (chúng trông giống như vòng đệm với các lỗ có đường kính khác nhau ở trung tâm), được lắp vào lỗ chính giữa của giá đỡ
Vít có thể được cố định vào động cơ dựa trên phương pháp lắp được hỗ trợ bởi động cơ của bạn. Nếu trục động cơ không ngụ ý bất kỳ tùy chọn buộc nào (kết nối ren, các thiết bị buộc khác nhau, v.v.), thì các bộ điều hợp đặc biệt được sử dụng, chẳng hạn như bộ bảo vệ và kẹp kẹp.
- Propsaver
- Mâm cặp Collet
Động cơ không chổi than có rôto bên ngoài (loại "Outrunner"), theo quy luật, ở phần trên của nó, có một số lỗ renlà một lựa chọn phổ biến không kém để gắn cánh quạt vào trục động cơ BC. Trục của một động cơ như vậy ở cuối có một sợi, chiều của nó ngược với chiều quay của rôto. Cách tiếp cận này giúp loại bỏ sự nới lỏng tự nhiên của đai ốc cố định, đảm bảo hoạt động an toàn và đáng tin cậy của máy bay không người lái.
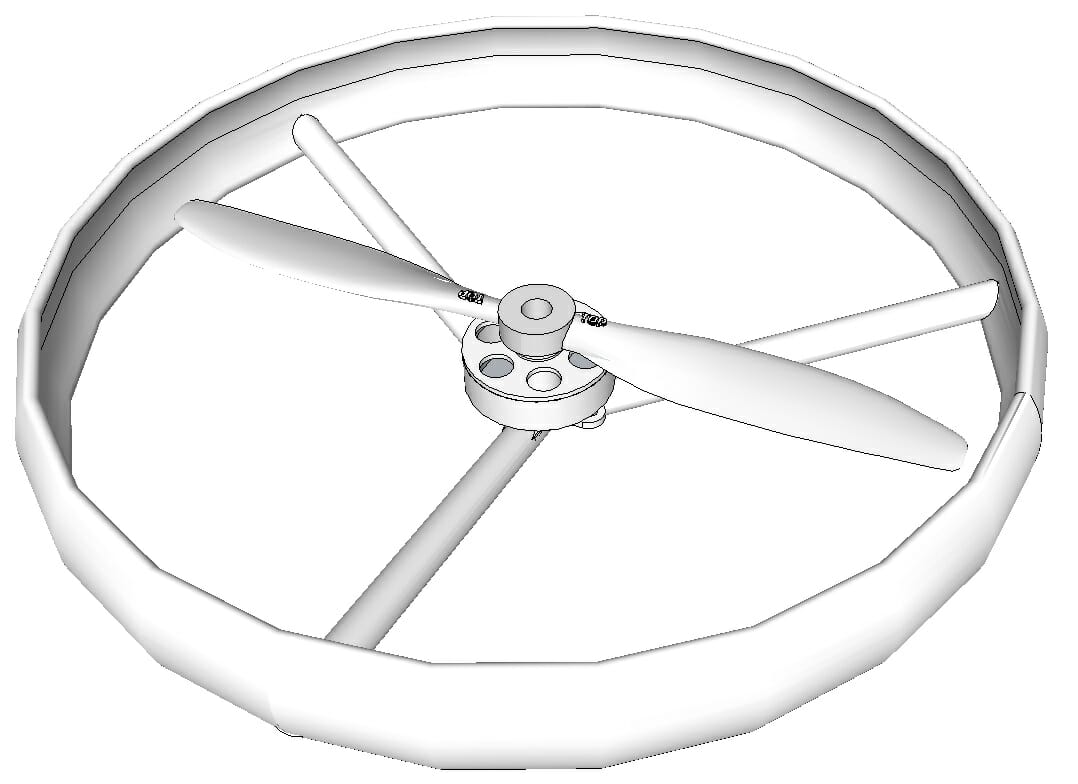
Bảo vệ cánh quạt
Bảo vệ cánh quạt - được thiết kế để loại trừ sự tiếp xúc trực tiếp của nhà máy điện UAV với một đối tượng đang tới, do đó bảo vệ tính toàn vẹn và khả năng hoạt động của nó, cũng như để ngăn ngừa thương tích o cánh quạt quay nhanh do va chạm với người và động vật. Các bộ phận bảo vệ chân vịt được gắn vào khung chính. Tùy thuộc vào phiên bản, nó có thể chồng lên một phần khu vực làm việc của nhà máy điện, hoặc hoàn toàn (bảo vệ vòng). Bảo vệ cánh quạt thường được sử dụng nhất trên các UAV nhỏ (đồ chơi). Việc sử dụng các bộ phận bảo vệ trong bộ phận lắp ráp cũng mang lại một số thỏa hiệp, trong đó:
- Có thể gây ra rung động quá mức.
- Nói chung chịu được đòn nhẹ.
- Có thể làm giảm lực đẩy nếu đặt quá nhiều chân đế dưới chân vịt.
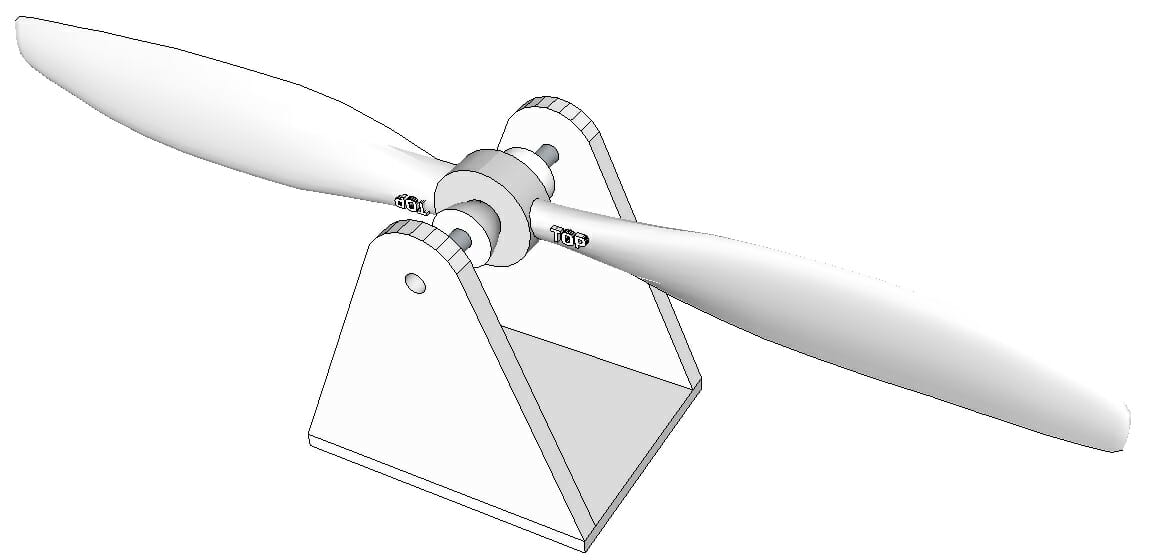
Cân bằng
Cân bằng kém xảy ra trên hầu hết các loại chân vịt rẻ tiền. Để đảm bảo điều này, bạn không cần phải đi đâu xa, chỉ cần cắm bút chì vào lỗ chính giữa của vít (theo quy luật, với sự mất cân bằng, một bên sẽ nặng hơn bên kia). Do đó, bạn nên cân bằng các đạo cụ của mình trước khi lắp chúng vào động cơ. Một cánh quạt không cân bằng sẽ gây ra rung động quá mức, từ đó ảnh hưởng tiêu cực đến hoạt động của bộ điều khiển chuyến bay (biểu hiện ở hành vi không chính xác của máy bay không người lái trong chuyến bay), chưa kể đến việc tăng tiếng ồn, tăng mài mòn các bộ phận của nhà máy điện và làm hư hỏng chất lượng của việc chụp một máy ảnh bị treo.
Cánh quạt có thể được cân bằng theo nhiều cách khác nhau, nhưng nếu bạn đang chế tạo một máy bay không người lái từ đầu, thì trong kho công cụ phải là một thứ rẻ tiền. máy cân bằng cánh quạt, cho phép bạn dễ dàng và đơn giản xác định sự mất cân bằng trọng lượng trong cánh quạt. Để cân bằng trọng lượng, bạn có thể mài phần nặng nhất của cánh quạt (phần trung tâm của lưỡi dao được chà nhám đều và trong trường hợp không cắt bỏ phần cánh quạt), bạn cũng có thể cân bằng bằng cách dán một miếng băng keo (mỏng) trên lưỡi dao nhẹ hơn (thêm các phân đoạn đều nhau cho đến khi đạt được sự cân bằng). Lưu ý rằng bạn thực hiện nâng cấp cân bằng (chà nhám hoặc thêm dây đai) của chân vịt càng xa tâm thì hiệu quả dựa trên nguyên lý mô-men xoắn càng lớn.
3. ESC
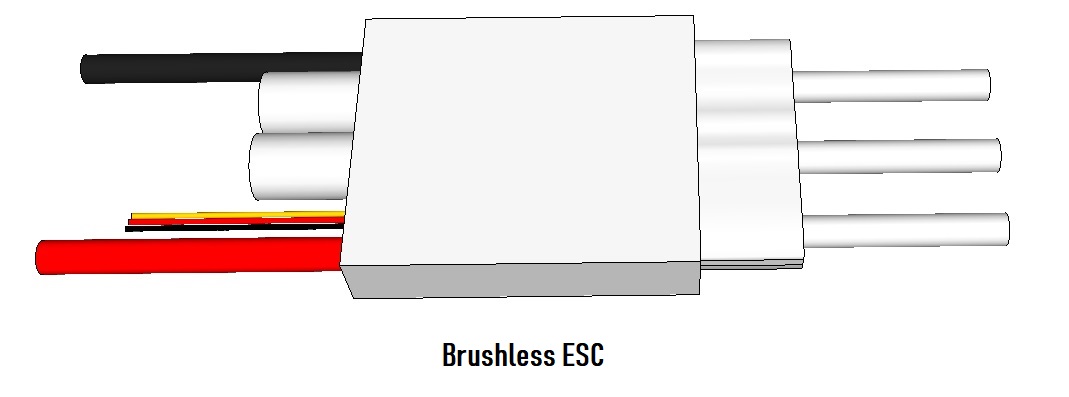
ESC (Bộ điều khiển tốc độ điện tử tiếng Anh; rus.bộ điều khiển tốc độ điện tử) - cho phép bộ điều khiển chuyến bay điều khiển tốc độ và hướng của động cơ. Với điện áp chính xác, ESC phải có khả năng chịu tối đa. dòng điện mà động cơ có thể tiêu thụ, và cũng hạn chế dòng điện đi qua pha trong quá trình chuyển mạch. Hầu hết các ESC sở thích bay không người lái chỉ cho phép động cơ quay theo một hướng, tuy nhiên với phần sụn chính xác, chúng có thể hoạt động theo cả hai hướng.
Kết nối
Ban đầu, ESC có thể gây nhầm lẫn vì có một số dây / chân / đầu nối có sẵn để kết nối nó. các mặt (ESC có thể đi kèm hoặc không có đầu nối hàn).
- Nguồn điện: Hai dây dẫn dày (thường là màu đen và đỏ) được cung cấp để cung cấp điện từ bảng phân phối / bộ khai thác mà nguồn điện đến trực tiếp từ pin chính của máy bay.
- 3 đầu nối: Ba đầu nối có sẵn ở phía đối diện của bộ điều khiển để kết nối với ba đầu nối đạn (thường được cung cấp cùng động cơ) trên động cơ không chổi than. Việc sử dụng các đầu nối khi kết nối ESC cho phép, nếu cần thiết (trong trường hợp hỏng), nhanh chóng thay đổi bộ điều khiển mà không cần sử dụng mỏ hàn. Điều xảy ra là các đầu nối hình viên đạn đi kèm với động cơ không khớp với các đầu nối trên bộ điều chỉnh, trong trường hợp đó, chỉ cần thay thế chúng bằng những đầu nối phù hợp. Cái nào trong ba cái là "cộng" và cái nào là "trừ"? Điểm tham chiếu là một dây dương đơn giản đến từ pin, đi vào cực dương trên ESC, tương tự với điểm trừ.
- Đầu nối servo 3 chân R / C với dây mỏng: qua đó tín hiệu đến từ bộ thu được xử lý, trong đó một dây là tín hiệu (truyền tín hiệu khí đến ESC hoặc đầu vào), "Dấu trừ" thứ hai (hoặc nối đất) và dây dương (không được sử dụng nếu không có BEC tích hợp; với BEC tích hợp, đó là đầu ra nguồn 5V, sau này có thể được sử dụng để cấp nguồn điện tử trên tàu).
BEC
Trong những ngày đầu của mô hình máy bay, một động cơ đốt trong được sử dụng làm nhà máy điện, và các thiết bị điện tử trên máy bay được cung cấp bởi một pin. Với sự ra đời của bộ điều khiển và kéo điện (ESC), sau này, chúng bắt đầu bao gồm cái gọi là mạch loại bỏ pin - BEC (trong tiếng Anh. Pin E Remotor Circuit; hoặc bộ chuyển đổi điện trên bo mạch; theo quy luật, nó cung cấp một nguồn dòng điện bổ sung có điện áp 5V với cường độ dòng điện 1A trở lên). Nói cách khác, nó là một bộ chuyển đổi điện áp được sử dụng trong cụm LiPo thành điện áp để cung cấp năng lượng cho các thiết bị điện tử trên bo mạch của máy bay không người lái.
Khi lắp ráp nhiều cánh quạt, tất cả các ESC phải được kết nối với bộ điều khiển bay, nhưng chỉ cần một BEC, nếu không các vấn đề có thể phát sinh khi cấp nguồn cho các đường dây giống nhau. Vì thường không có cách nào để vô hiệu hóa BEC trên ESC, tốt nhất là tháo dây màu đỏ () và quấn nó bằng băng dính điện cho tất cả trừ một ESC. Việc để dây đen (nối đất) cho đất chung cũng rất quan trọng.
Phần mềm cơ sở
Không phải tất cả các ESC trên thị trường đều tốt như nhau cho các ứng dụng nhiều rôto. Điều quan trọng cần hiểu là trước khi UAV nhiều động cơ ra đời, động cơ không chổi than được sử dụng chủ yếu như một nhà máy điện cho ô tô, máy bay và trực thăng điều khiển bằng sóng vô tuyến. Hầu hết không yêu cầu thời gian phản hồi nhanh hoặc cập nhật. Các ESC với phần mềm SimonK hoặc BLHeli được nhúng có thể phản ứng rất nhanh với những thay đổi sắp đến, điều này thường tạo ra sự khác biệt giữa chuyến bay ổn định hoặc sự cố.
Phân phối điện
Vì mỗi ESC được cấp nguồn bởi pin chính, nên bằng cách nào đó, đầu nối pin chính phải được chia thành bốn ESC. Điều này được thực hiện bằng cách sử dụng Bảng phân phối điệnKhai thác phân phối điệnDeans
4. Pin
Hóa học
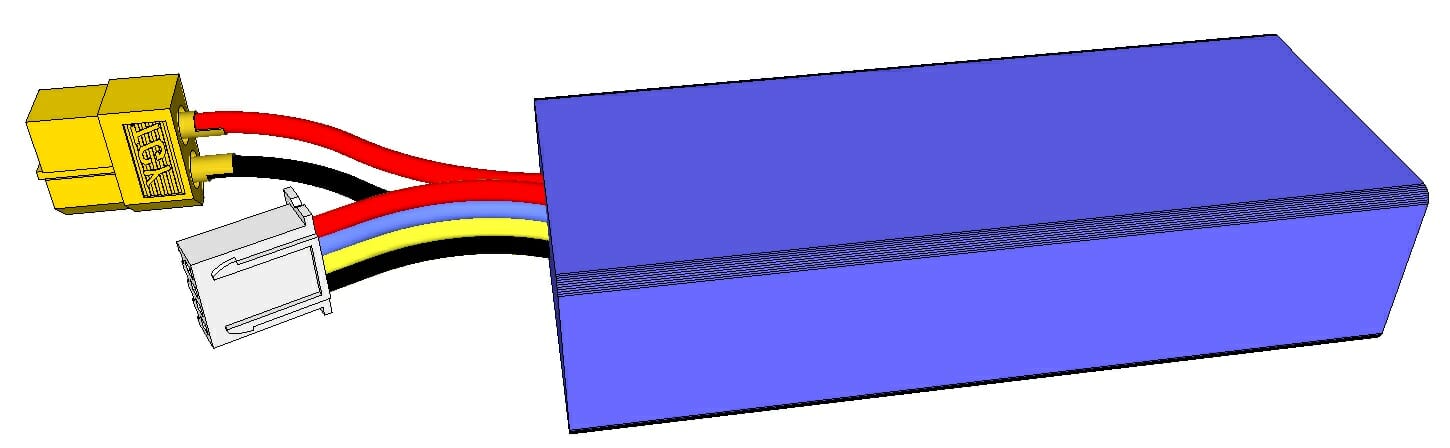
Pin được sử dụng trong máy bay không người lái hiện là độc quyền lithium polymer (LiPo), và thành phần của một số trong số chúng khá kỳ lạ - lithium mangan hoặc lithium khác các biến thể. Axit chì đơn giản là không phù hợp và NiMh / NiCd vẫn còn quá nặng so với khả năng của chúng và thường không thể cung cấp tốc độ phóng điện cao cần thiết. LiPo cung cấp hiệu suất cao và tốc độ xả với trọng lượng thấp. Nhược điểm của chúng là chi phí tương đối cao và các vấn đề an toàn thường xuyên xảy ra (nguy cơ cháy nổ).
Điện áp
Trên thực tế, bạn chỉ cần một pin cho UAV của mình. Điện áp của pin này phải phù hợp với động cơ BK mà bạn đã chọn. Hầu hết tất cả các loại pin được sử dụng ngày nay đều dựa trên lithium và chứa một số ô (lon) mỗi pin 3,7V, trong đó 3,7V = 1S (tức là pin một lon; 2S là pin hai lon, v.v.). Do đó, pin có nhãn 4S có khả năng có giá trị danh nghĩa là 4 × 3,7V = 14,8V. Ngoài ra, số lượng lon sẽ giúp bạn xác định bộ sạc nào sẽ sử dụng. Lưu ý rằng pin đơn cell dung lượng cao có thể trông giống như pin đa cell dung lượng thấp.
Dung lượng
Dung lượng pin được đo bằng ampe-giờ (Ah). Pin nhỏ có thể có dung lượng 0,1Ah (100mAh), dung lượng pin cho máy bay không người lái cỡ trung có thể từ 2-3Ah (2000mAh - 3000mAh). Dung lượng càng cao thì thời gian bay càng lâu và theo đó, pin càng nặng. Thời gian bay của một UAV thông thường có thể trong khoảng 10 - 20 phút, điều này có vẻ ngắn ngủi, nhưng bạn nên hiểu rằng máy bay không người lái liên tục phải vật lộn với trọng lực trong suốt chuyến bay, và không giống như máy bay, nó không có bề mặt. (cánh) cung cấp hỗ trợ dưới dạng lực nâng tối ưu.
Tốc độ xả
Tốc độ xả pin Lithium được đo bằng “C” trong đó 1C là dung lượng pin (thường tính bằng ampe giờ trừ khi bạn đang xem xét một máy bay không người lái có kích thước bằng Lòng bàn tay). Tốc độ phóng điện của hầu hết các loại pin LiPo ít nhất là 5C (gấp năm lần dung lượng), nhưng vì hầu hết các động cơ được sử dụng trong UAV nhiều cánh quạt tiêu thụ rất nhiều dòng điện, nên pin phải có khả năng phóng điện ở dòng điện cực cao, thường là khoảng 30A trở lên.
An toàn
Pin LiPo không hoàn toàn an toàn vì chúng chứa khí hydro áp suất và có xu hướng cháy và / hoặc nổ khi bất cứ điều gì là sai. Do đó, nếu bạn có bất kỳ nghi ngờ nào về sức khỏe của pin, trong mọi trường hợp, không kết nối nó với máy bay không người lái hoặc thậm chí với bộ sạc - hãy coi nó "ngừng hoạt động" và vứt bỏ nó đúng cách. Dấu hiệu cho biết pin có vấn đề gì đó là các vết lõm hoặc phồng (tức là rò rỉ khí). Khi sạc pin LiPo, cách tốt nhất là sử dụng hộp LiPo an toàn (Hộp an toàn cho pin). Lưu trữ pin

Sạc
Hầu hết pin LiPo đều có hai đầu nốiBộ sạccác mối quan tâm về an toàn liên quan đến pin lithium polymer
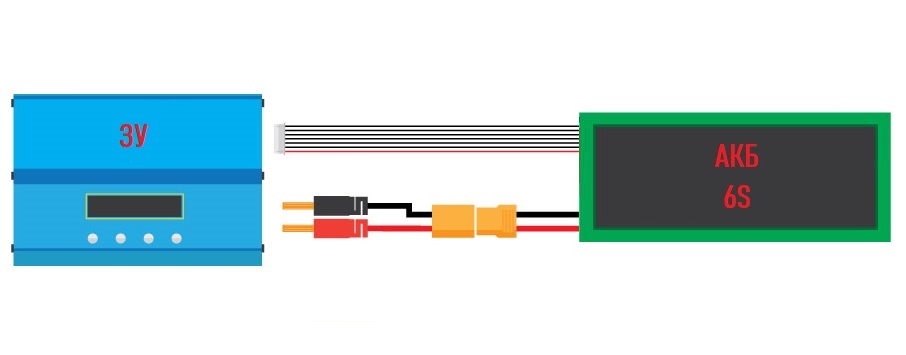
.Lắp đặt
Pin là phần tử nặng nhất của máy bay không người lái, vì vậy nó nên được lắp đặt ở trung tâm chết để đảm bảo cùng tải trên các động cơ. Pin không liên quan đến bất kỳ cách lắp đặc biệt nào (đặc biệt là vít tự khai thác có thể làm hỏng LiPo và gây cháy), vì vậy một số phương pháp lắp được sử dụng ngày nay bao gồm dây đai Velcro, cao su, ngăn nhựa và các phương pháp khác. Tùy chọn lắp pin phổ biến nhất là treo pin dưới khung bằng dây đeo Velcro.







