内容
介绍
使用小型无人机进行 FPV 和自主测绘正变得越来越流行,特别是随着无人机在第一人称模式下飞行的普及以及细节。本文探讨了飞机是否适合用作无人机的几个考虑因素,如果适合,如何选择正确的类型。
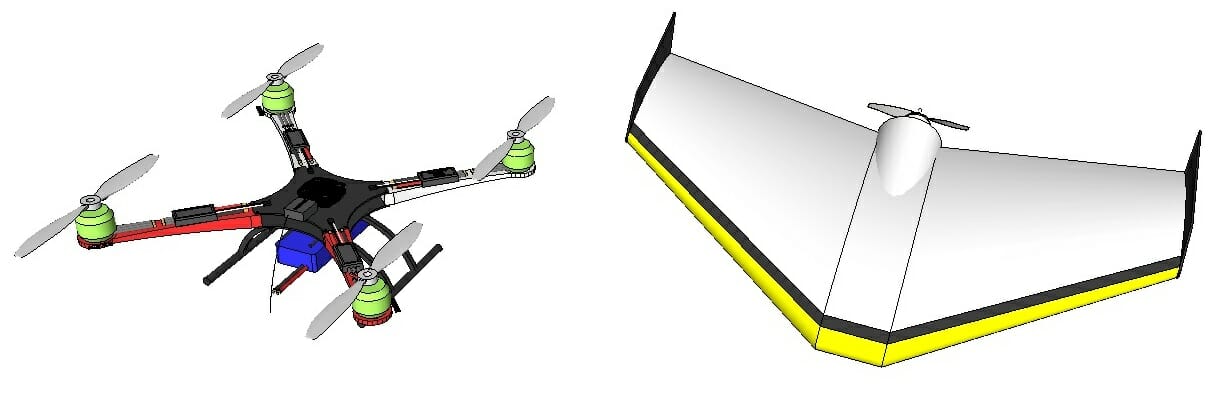
多旋翼机与飞机
与多旋翼机相比,飞机有哪些优势?虽然多旋翼飞行器非常适合有趣的 FPV / 自主飞行,但它的有效载荷和飞行时间仍然有限,因为旋翼必须不断旋转(从而浪费能量)以对抗重力并使无人机保持在空中。另一方面,飞机使用机翼产生升力。那么哪种类型更好呢?除了发射器、接收器、FPV 设备、飞行控制器等电子填充物外,以下功能似乎与回答所提出的问题最相关:
Multicopter
- 能够采取起飞和垂直降落以及悬停在原地。
- 它们不需要很大的空间来飞行,并且本质上是“全向的”,能够非常迅速地改变方向和速度。
- 螺旋桨产生的推力使船保持在空中。
- 飞行中不太直观,因为船只可以改变方向并几乎向任何方向飞行,而万向节很容易导致迷失方向。
- 直径为 400 至 600 毫米的“中型”多旋翼飞行器是最常见的,并且(定制的)即用型钻机的成本通常在 200 美元到 1000 美元之间。
- 尽管多旋翼飞行器的运动部件比直升机少得多,但四旋翼飞行器的几乎任何故障都会导致事故。
飞机
- 由跑道或弹射器手动发射,通常降落在相对平坦的草地或跑道上......
- 由于飞机的机动性有限(即总是需要向前移动),飞行需要一个大的开放空间。
- 机翼产生升力。
- 更高的起重能力。
- 泡沫模型可以在发生事故时放纵,大多数可以修复/翻新。
- 翼展为 500mm 至 1.8m 的型号最常用于业余爱好用途,完整安装的成本通常在 200 美元至 1000 美元之间。
- 在发动机故障的情况下,仍然可以在不损坏飞机的情况下着陆。
VTOL(垂直起降)
- 结构包括机翼和螺旋桨(目前商业/生产产品不多)。
- 控制仍然很难从垂直飞行切换到水平飞行。
- 这些设计与带机翼的四轴飞行器或使用/加长无人机支撑臂(梁)以实现机翼轮廓非常不同。
- 本文不再进一步讨论。

注意事项
- 发射场: 伤害或损害个人或财产,无人机/无人机禁止飞越建筑物、人口稠密地区或人群密集场所。理想情况下,飞机需要较大的开放区域,而多轴飞行器可以在更狭窄的空间内运行。如果您没有空地进行飞行,那么最好使用小型多旋翼飞行器。
- 应用: 多旋翼飞行器比以往更适合航拍/FPV 摄影。最好使用飞机进行测绘和长途飞行。
- 兴趣: 这应该是您选择是否对一种类型的无人机更感兴趣时的一个因素。
- 预算: 最常见的多旋翼飞行器 (500mm) 可能比同类飞机 (≈ 1.5m 翼展) 稍贵,但不会太多。由于突然坠毁或失控导致不受控制的移动,您准备好丢失无人机吗?
- 飞行时间: 一个普通的四轴飞行器,平均尺寸会在空中停留 10-15 分钟(虽然一些制造商可能会增加这个时间到 30-40 分钟),而平均一个中等大型电动飞机在“正常”使用(即非全油门)下每分钟可提供大约 20-60 分钟的续航时间,但是在这两种情况下都需要考虑许多不同的因素。
- 飞行控制器: 并非所有控制器都能够驾驶所有类型的飞机。在选择其中一种之前,请确保飞行控制器支持您感兴趣的飞机类型(如果您打算使用一种)。本文不讨论如何设置飞控。
常见的无人机/无人机机翼类型
有许多不同的机身用于制造无人机,但有些设计比其他设计更常用。随着越来越多的制造商开始生产用于独立使用的定制空气动力学框架,例如驾驶舱布局等过去通常在遥控飞机上常见的不必要部件正在消失。

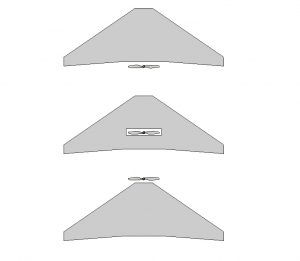
三角翼
飞翼是迄今为止最简单的(也许是最受欢迎的)设计。可以使用廉价的发泡聚丙烯泡沫 (EPP) 和基本的 Kline-Fogleman 翼型(Kline-Fogleman 或 KFm)制造简单/基本的框架。它们传统上只有两个控制面,这意味着所有转弯都是用滚轮完成的。螺旋桨通常在后部(允许将相机安装在前部),但如果重心正确,则它的飞行方式与发动机在中央或前部的方式相同。精湛的结构因其简单而易于高速飞行。
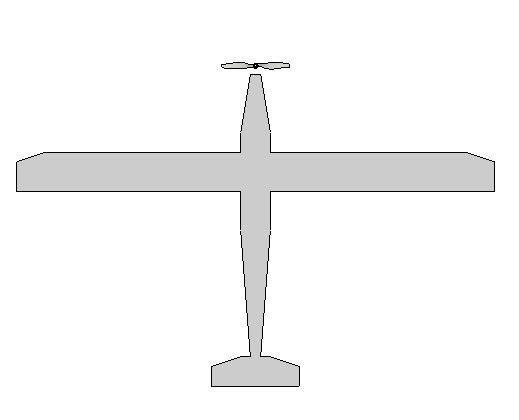
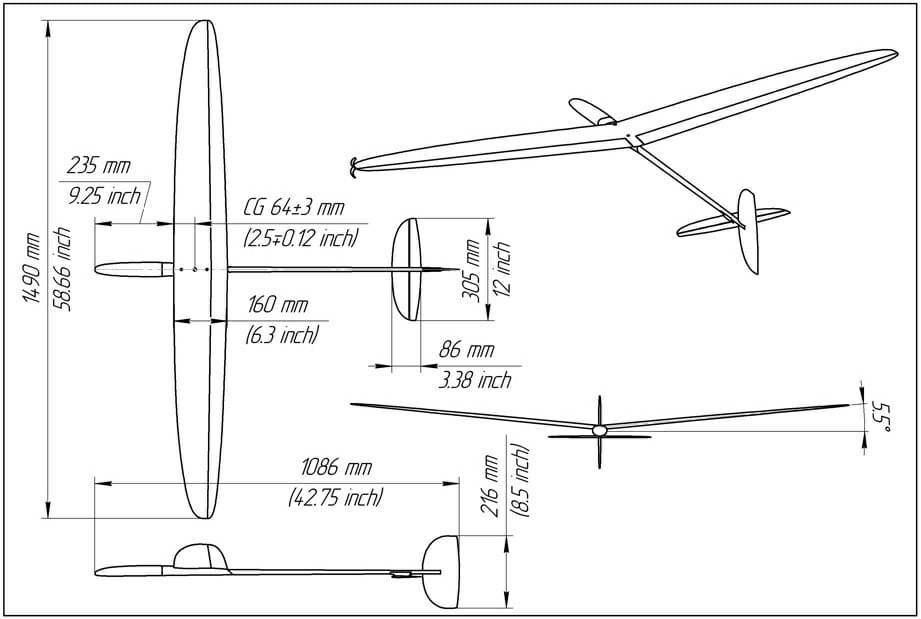
电动滑翔机/滑翔机
如果您想在高空停留尽可能长的时间(即最长的飞行时间),这设计是最好的选择。通常它可以有一个中等或高的翅膀,尾巴通常是 T 形或 V 形。此处显示的所有框架都可用于有趣的飞行(或更多),但是,如果您希望无人机尽可能长时间地在空中停留,则需要考虑具有大机翼的飞机,这就是滑翔机的所在优秀。它们并非设计为最快(而是最慢)和承载最多有效载荷(它们应该尽可能轻),但一个好的设计可以在空中停留数小时。几乎所有的螺旋桨都安装在前部,因此在需要摄像头的情况下,通常将其安装在机身的底部/腹部。
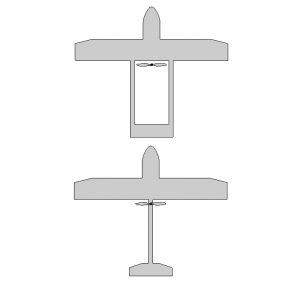
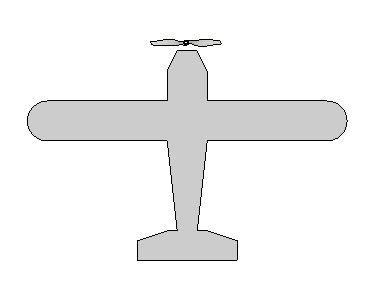
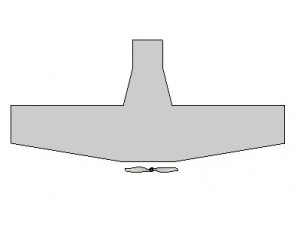
“天行者”
干扰,位于正下方。机翼通常为梯形或矩形。另一种设计使用两个吊杆来支撑尾部(螺旋桨的每一侧各一个,类型为“ Twin Boom
标准
传统遥控飞机仍然经常被改装用作无人机,设计范围从野马(运动)到派珀小熊(教练)。几乎所有都有一个前置螺旋桨(拉或拉)。机翼通常具有笔直的前缘/后缘(矩形),但对于战斗机,机翼可能更呈梯形。这种设计最常用,因为它们是最常见和最容易获得的遥控飞机。不幸的是,该飞机不适合改装,并且包含用作无人机时不需要的美学元素。另外,在选择一个无障碍的地方安装摄像头方面,这也不是最方便的设计。大多数是基于不能原谅事故的木材。
定制
有几种定制设计可用,其中之一是“Drak”(几乎是倒三角)。这种特殊设计的机翼几乎处于前掠位置,后部有一个螺旋桨。各型号的优缺点各不相同,但其独特的外观往往会引起很多人的注意。
尺寸
那么你的飞机应该有多大?一种决定未来交通方式的标准,通常甚至在使用之前就被提及。飞机(几乎)总是比多旋翼飞机大,而且由于您计划飞行的空间可能不在您的家或公司附近,因此大多数情况下,运输需要通过汽车完成。正因为如此,这类无人机的框架尺寸往往限制在 2 米(翼展),而且在大多数情况下,机翼应该是可拆卸的。如果飞翼不能有可拆卸的机翼,那么翼展将小于1.2米,以便轻松放置在车辆的后座上。传统上,标准尺寸的遥控飞机的翼展为 0.5 - 2m,因此这种尺寸的零件(发动机、ESC、电池、伺服系统等)的可用性非常好。
飞行持续时间
您可能会问自己的第二个问题是飞机应该在空中停留多长时间。如果您打算远程控制飞机,值得考虑的是,在大约 20-30 分钟的驾驶后,大多数人会感到身心疲惫并尝试完成飞行。对于长期飞行,建议考虑翼展至少2米(低有效载荷)的滑翔机。
应用
当然,第三个考虑因素是潜在的应用。常见的列表:FPV 飞行、测绘以及使用传感器的完全自主飞行。自主飞行需要一个GPS飞控,也可以加装传感器。

套件类型
对于那些只想进行第一人称或自主飞行的人来说,设计定制飞机很少是优先事项。因为这通常需要认真的研究或足够的空气动力学知识。为此,专门为 FPV/UAV 设计的框架越来越受欢迎。然而,鉴于传统遥控飞机的广泛普及,许多爱好者仍在转向现有的遥控模型(不一定是比例模型)并将其改装为 FPV/自主使用。
RTF(准备飞行) - 该套件包括您将产品用于其预期用途所需的一切,并且通常包括一个完全组装好的框架(为了更紧凑的交付,机翼可以拆除)预装工作填料(电机、ESC、伺服系统、襟翼等),以及发射器和接收器、电池和充电器。通常您将机身连接到机翼(或机翼),充电,安装并连接电池,然后您就可以飞行了。这是进入空中的最快方式,但同时此类套件不允许后续升级。
BNF(绑定和飞行) - 无人机交付时几乎完全组装(为了更紧凑的交付,机翼可以拆卸)。该套件不包括接收器/发射器。考虑到所有零件都已组装/组装,组装速度非常快。您需要将接收器连接到舵机和动力系统,安装电池并检查 CG(重心),然后通过飞行前发射清单,执行校准。请注意,可能需要为该无人机型号定制您的控制设备。这是进入空气的第二快方式。
PNF(即插即飞) - 飞机大部分已完全组装(为了更紧凑的交付,机翼可以拆卸)。该套件包括 ESC、螺旋桨和伺服系统。该套件不包括发射器、接收器、电池或充电器。您需要将接收器连接到舵机和动力系统,选择并安装电池(检查 CG),然后通过飞行前发射清单,执行校准。请注意,可能需要为此无人机型号定制您的控制设备。
PNP(即插即用) - 与 PNF 套件相同。
ARF (Almost Ready to Fly) - 这种配置的产品通常包括一个框架和一些硬件。提供部分组装的几乎所有组装车架所需的车架零件/组件。可能需要一些粘附力。用户需要选择自己的发射器、接收器、电机、电调、螺旋桨和舵机,因为它们不包括在内。
KIT - 这些天 KIT 飞机包括组装计划,但飞机值得飞行还需要很长时间。建议在驾驶 KIT 飞机之前有一些飞行经验,因为一次事故(通常是第一次飞行)可能导致无人机恢复数小时。
DIY(自己动手/从头开始建造) - 说到飞机,通常意味着完全非标准的设计,可能是由飞行员。通常设计人员需要选择所有合适的组件,而组装往往是通过反复试验来完成的。
结构
有许多不同的材料用于制造遥控飞机/无人机的框架、挡泥板和尾部。虽然有人驾驶飞机通常使用玻璃纤维、铝,甚至碳纤维,但无人机制造商尚未在小型飞行器中使用此类材料。以下是行业中最常见的材料:
EPO(发泡聚烯烃) - 这种类型的泡沫重量轻,比发泡聚苯乙烯( EPS )。制作模具时,它可以让您获得相当光滑的表面。万一发生事故,这种泡沫会压缩,如果用力过大,最薄弱的地方就会受到破坏。通常,EPO 制成的零件保持牢固,如果事故不严重,可以稍后粘合损坏的元件。
EPP(发泡聚丙烯) - 这种类型的泡沫具有柔韧性和弹性,虽然比 EPO 稍重,但实际上坚不可摧(对于实际目标)。
EPS (Expanded PolyStyrene) - 这种类型的泡沫通常用作电视、电器的包装材料,用于制造头盔、冰箱内和用于道路和家庭建设。 EPS 含有约 95-98% 的空气。
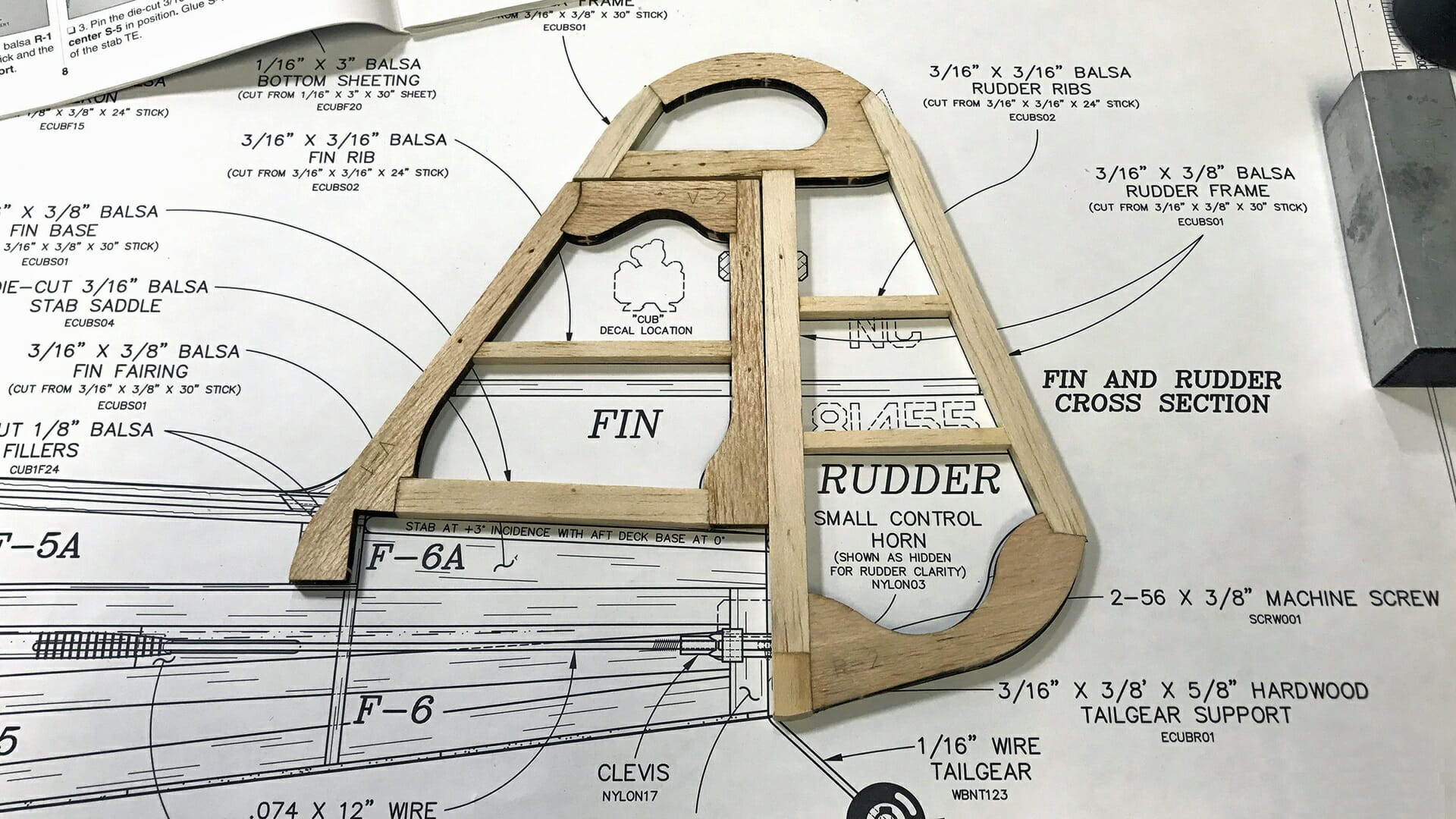
轻木 - 过去,大多数遥控飞机使用轻木作为基础材料。它是一种令人难以置信的轻质木材,但坚固且易于加工,最适合用于框架、挡泥板和尾翼。在施工过程中必须投入大量的精力和时间,即使是最轻微的撞击也会对框架造成严重损坏(更严重的碰撞会导致完全破坏)。
吹塑塑料 - 塑料吹塑工艺涉及一个封闭的模具,将半熔融塑料吹入该模具中,然后冷却以保持其形状。结果是一个坚固的空心壳。吹塑塑料最常用于制造机身(与机翼相反),制造后用户必须制作适当的切口。吹制结构/套件还可以包括预切轻木作为增强材料。吹制的塑料可以承受轻微的冲击,并且有凹痕而不是坍塌的趋势。
真空塑料 - 真空成型过程包括将薄塑料片加热到使其变得柔韧但未完全熔化的程度,然后将其放在覆盖的矩阵;在保持柔性的同时,模具和片材之间的空气被去除(即被抽出),从而使片材成形。塑料冷却下来,从周围的材料上切下一个 3D 形状。有许多不同类型的塑料可以真空成型,它们的特性也各不相同。聚碳酸酯是重量和抗冲击性之间的良好折衷。
波纹塑料 - 尽管很少有飞机将其用于机身或机翼,但它通常用于加固门或任何需要平坦表面的地方。瓦楞塑料看起来像瓦楞纸板,只是由塑料制成。它非常抗碰撞和抗震,无需任何特殊工具即可轻松使用,并且非常时尚(空气动力学)。
哪种材料更好?
那么你应该为飞机选择什么材料?绝大多数 FPV 社区使用 EPO 泡沫,因为:
- 与轻木相比,它需要的组装时间成倍减少,因此上升到空气中的速度更快。
- 与其他材料相比相对较轻,并且相当坚韧*,但可以轻松修改/切割。
- “宽恕”,从某种意义上说,他能够承受意外和微小的冲击,并且还可以多次重新粘合;再次飞行。
- 质量好;泡沫模型相当昂贵,因为设计师需要补偿结构、原型和模具的成本,而框架的成本通常与其尺寸成正比。
- 不需要特殊工具,例如加热的层压铁。
- 最完整的框架包括基本所需的组件(轻木模型通常需要额外购买层压板、大多数硬件等)。
*泡沫模型本身很少足够硬,为了承受飞行中作用在机翼上的载荷,后者需要以“翼梁”(长而细的杆,通常由玻璃纤维或碳纤维制成)形式进行额外加固,以增加刚度。构想的这些翼梁必须粘合在机翼上方和下方的各个重要位置(粘合到预先切割的通道中)。通常,泡沫模型的大小仅限制了实用性,这就是为什么很少看到翼展超过 2m 的模型。

Build
- 泡沫: 重要的是要注意并不是所有的胶水都可以用来粘合泡沫,因为一些现有的胶水会腐蚀和破坏材料。用于粘合 EPO 泡沫的最常见粘合剂是 Goop(品牌名称)和 Gorilla Glue(品牌名称)。 Goop 是透明的,具有浓稠的稠度和出色的粘合力。大猩猩胶 - 需要一点水才能激活,初始稠度很厚。与水相互作用后,泡沫最多可达其原始大小的 400%,并呈黄色。大猩猩胶可以在不合需要的地方剪掉,但要防止胶水漏到不该漏的地方(例如用美纹纸),涂好后,固定的部位要静止不动,胶水膨胀并变硬。通常用锋利的刀、焊枪(而不是烙铁)或加热线切割泡沫。手锯往往会破坏泡沫并留下非常粗糙的表面。泡沫平面通常是白色的,很少是黑色的,更不常见的是灰色或其他颜色。外观定制是关于添加可以使用特殊油漆、层压板或乙烯基完成的颜色或图案。请注意,并非所有涂料都适合为泡沫着色,有些涂料会破坏泡沫。
- 轻木: 氰基丙烯酸酯胶最常用于粘合轻木 - 通常是一种粘性液体(几乎像水),在要粘合的表面之间提供非常牢固的粘合。框架准备好后,需要用层压材料(一侧带有热活化粘合剂的塑料板)覆盖以形成空气动力学表面。覆膜用覆膜熨斗加热/施加,在出口处提供坚固/坚硬的表面。层压板仅适用于粘合轻木 - 它不能用于创建 3D 形状。
- 复合材料: 用于制造小型飞机的复合材料(碳纤维)仍然很少见。这些零件以环氧树脂(或特殊粘合剂)为基础,手工切割更困难,通常需要数控铣床。 3D 形状 的创建也非常复杂。飞机通常使用复合材料进行加固。

动力
- 飞机动力装置由马达、螺旋桨(螺旋桨)、电调和电池组成...为车架选择正确的零件不应是“猜测”,最好查看车架制造商是否有任何关于电机、螺旋桨或给定有效载荷范围的建议。
- 如今,大多数爱好者都倾向于使用电动机而不是燃料(如煤油),因为它们的拥有成本最低且易于使用。太阳能很少使用,因为与太阳能电池板(用于为电池充电)的增加重量相比,太阳能提供的功率仍然没有好处。
- 选择能够在特定负载下为您的滑翔机提供所需推力的电机/螺旋桨组合。几家滑翔机制造商根据自己的实验提供了许多推力要求,以大致了解所需范围。
- 飞机动力不足会导致不稳定或坠毁。超载的飞机在飞行中可能完全不稳定。考虑到几乎所有用于制造无人机的技术都来自无线电控制行业,关于为各种应用选择正确的推力和伺服驱动器的信息很多。
- 质心:质心是框架可以围绕其放置的点,以便所有边的重量都相同。升力中心/扭矩比。这是机翼和控制面产生的所有升力相加的点,通常在机翼的最高点。理想的是质心对应于提升力的中心。

。发射/着陆
- 跑道发射/着陆: 使用跑道,无人机需要轮子,跑道必须尽可能平坦且铺得完美。
- 手动触发: 手动触发的方法主要有两种:手上摆动或头顶摆动。清扫方法类似于发射圆盘(或在水中投掷石块),操作员尝试使用角速度将无人机加速到最大速度。或者,有一种架空方法,操作员向上启动飞机(最好有第二个操作员/助手)。
- 弹射器发射: 为了尽快加速无人机,弹射器使用几种不同方法中的一种:弹力绳、绞盘,甚至压缩空气。弹射器不易运输,需要额外的投资和诊断。
- 手握: 用手抓住小型无人机并不难,只要螺旋桨不旋转,但不知何故该方法需要一些技巧。
- 着陆: 最常用的着陆方法是滑行着陆在适当水平的表面上,例如草地。这种方法很重要,因为越来越少的无人机拥有起落架(而且跑道不可用),迫使飞机简单地降落在任何可能的飞机上。通常,在飞行前,飞行员会找到合适的着陆点。理想情况下,由于逐渐磨损,飞机应该具有可更换的保护板。
- 网络“捕捉”: 虽然这种着陆方式最常被军方用于小型无人机,但在其他着陆方式难以实现的情况下,使用网捕捉无人机非常有效。话虽如此,建立网络系统非常耗时,大多数爱好者更喜欢其他类型的种植。








