什么是四轴飞行器?
四轴飞行器是一种多轴飞行器。多旋翼飞机是一种多引擎或多旋翼飞机(直升机),其主旋翼沿相反方向对角旋转。多轴飞行器因电机数量(或转子数量)而异。如今,已经使用了具有三个或更多旋翼的多旋翼飞行器。
最常见的方案是:4/6/8个转子。具有三个转子螺旋桨的装置称为三轴飞行器;四 - 四轴飞行器;六个 - 六轴飞行器和八个转子 - 八轴飞行器。每种方案的使用基本上决定了这样一个参数——有效载荷的质量,或者更简单地说,多旋翼飞机可以承受的重量。
现代多旋翼解决方案的例子。
来自不同价位的现代多旋翼解决方案:




从历史
这一切都可以追溯到 1922 年与俄裔美国飞机设计师 Georgy Aleksandrovich Botezat 的合作。谁发明了同类中的第一个工作四轴飞行器。他的仪器不仅能离开地面,还能在空中停留一段时间。当时,这种设备有一个明显的缺点——工作原理。

四个转子中,只有一个是领先的(由内燃机设定旋转),即扭矩通过一个复杂的传动装置由一个电机传递到另外 3 个主旋翼。它没有进入串行开发。而“尾旋翼”、“斜盘”等发明被迫彻底放弃了多旋翼飞机的研制,后来创造了世界上第一架直升机。
随着21世纪的到来,多旋翼飞行器作为无人驾驶飞行器或无人机进入了我们的生活。
多旋翼机的主要部件
从技术上讲,大约 5 年前,出现了多旋翼机(无人机)的三个主要部件:
- 电池 -锂聚合物 (LiPo),较少使用锂离子 (Li-Ion)。
- 无刷 或有刷稀土电机。
- 遥控器(控制面板/硬件/发射器)

工作原理
现代多旋翼飞行器的工作原理是简单。根据应用方案(3/4/6/8 转子),每个转子由一个电动机(电动机)驱动。一半电机顺时针旋转螺钉,另一半逆时针旋转。由于这种方法,控制多旋翼飞行器不需要在无人机中使用尾桨和复杂的斜盘。
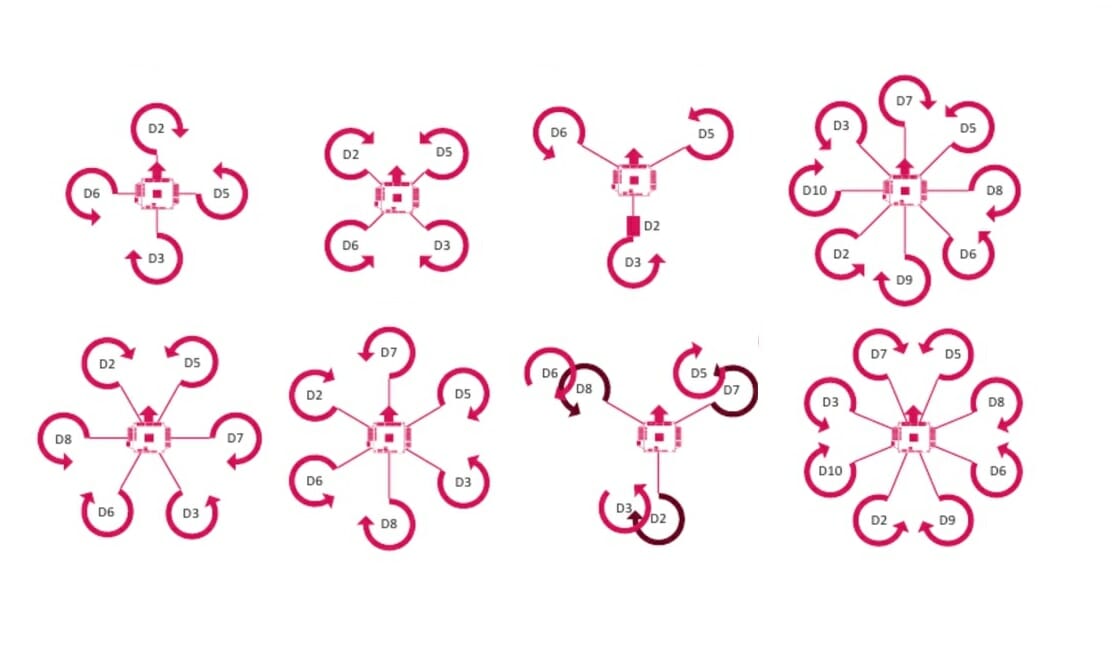
* 多旋翼旋翼旋转方向的顺序。
飞行控制示例:
- 增加所有旋翼的 RPM - 升力。
- 降低所有旋翼的速度 - 降低。
- 增加一半螺丝的转数并减少另一半螺丝的转数将使运动偏向一边。
- 增加顺时针螺旋桨的 RPM 和减少逆时针螺旋桨的 RPM 将使无人机旋转。
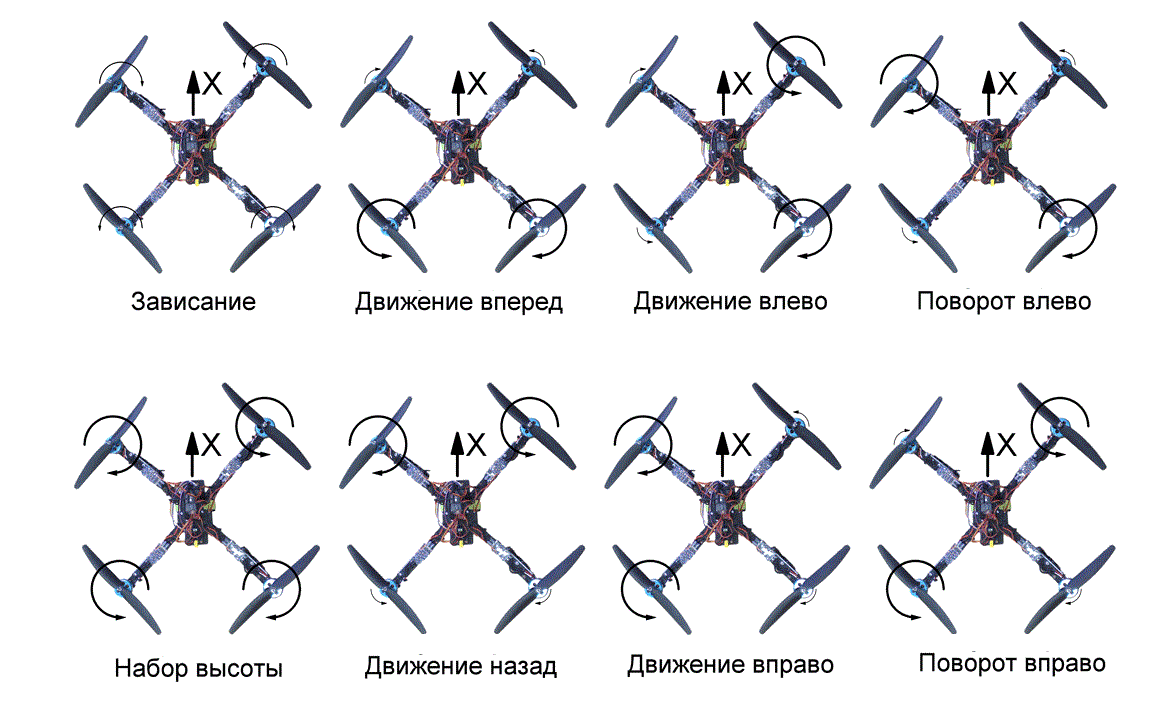
* 旋翼旋转的飞行控制方案。
电动机
目前在现代多旋翼飞行器(无人机)上使用两种类型的电动机 - 有刷和无刷。无刷无人机主要配备昂贵且专业的无人机。只有预算选项和玩具配备了收集电机。关于它们的差异的更多细节可以在这里找到 。

控制
多轴飞行器由遥控器(又名遥控器、设备、发射器 ) 通过输出无线电波控制(通常,频率 2.4GHz 或 5.8GHz )。
为了使多轴飞行器响应控制面板的请求,无人机配备了一个完整的电子系统:
- 微处理器((60)飞行控制器 ,实施作为一个微电路)——负责无人机所有电子填料的操作和管理。
- 陀螺仪 - 负责无人机在飞行过程中的稳定行为(通常,它沿 6 个方向轴提供稳定性)。
- 加速度计 - 该传感器允许处理器将飞机定位在相对于地面的水平位置。
- 气压传感器(气压计) - 为无人机提供稳定悬停在飞行员选定的高度。
- 声纳(超声波传感器) - 提供自动着陆并保持较小高度(1.5 - 3.5 米),也可用于绕过障碍物飞行。
- GPS 模块 - 使用从卫星系统接收的数据提供无人机的地理定位。由于它的存在,实现了点飞行功能,在失去通信或电池电量不足的情况下返回起飞地点,还允许您在飞行时和飞行后获取飞行读数.
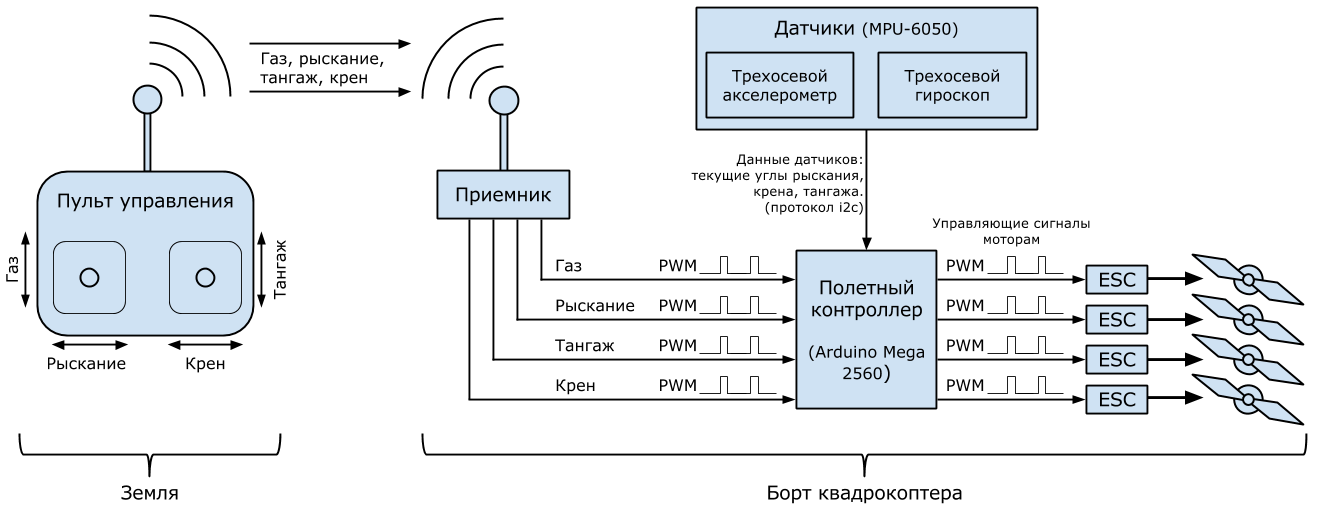
* 四轴飞行器设备的最简单方案。
它们是什么?
目前,消费级无人机市场提供了大量的多旋翼飞行器(无人机),但总的来说,它们可以分为三大类:(77)初学者/ 业余 / 专业
初学者 - 适合儿童和成人,以初识和学习为目的。通常,它们配备微处理器、6 轴陀螺仪和简单的气压传感器,以确保高度保持。
业余 - 适合已经有无人机使用经验的飞行员。更适合特定的应用。例如,用于航空摄影,或用于体育运动,例如 无人机竞速 。该组中的无人机可以具有自主飞行和调查功能。
专业 - 专门适用于在专业领域使用多轴飞行器(无人机)功能的有经验的飞行员。例如,专业的照片和视频拍摄、大地测量、陆地监测、交通、救援行动等。在大多数情况下,无人机具有自主飞行和勘测功能。电子填料由高精度现代系统组装而成,可远距离移除,电源可让您在飞行中花费更多时间。这种多轴飞行器之间的特征差异在于它们的价格。
为了更全面地了解无人系统,我们推荐主题 “什么是无人机?”
。






