
- 1 简介
- 2 特性
- 3 包装内容
- 4 规格
- 4.1 无人机
- 4.2 摄像机
- 4.3 控制面板
- 4.4 无人机电池
- 4.5 Mob.附录
- 5 外观
- 6 电机
- 7 摄像头
- 7.1 底部摄像头
- 7.2 在摄像头之间切换
- 7.3 保存照片/视频
- 8 FPV
- 9 移动应用界面
- 9.1 MV 编辑器
- 10 Headless模式
- 10.1 开/关模式
- 11 流量
- 11.1 流量切换
- 12 初学者模式
- 13 自动起飞和着陆
- 14 自动模式
- 14.1 智能跟随模式
- 14.2 圆形模式
- 14.3 飞行计划
- ) 14.4 航点飞行
- 14.5 无人机手势控制
- 14.6 手势控制
- 15 目录im RTH
- 16 电源
- 16.1 充电过程
- 17 控制
- 17.1 键盘按钮分配
- 18 初始启动
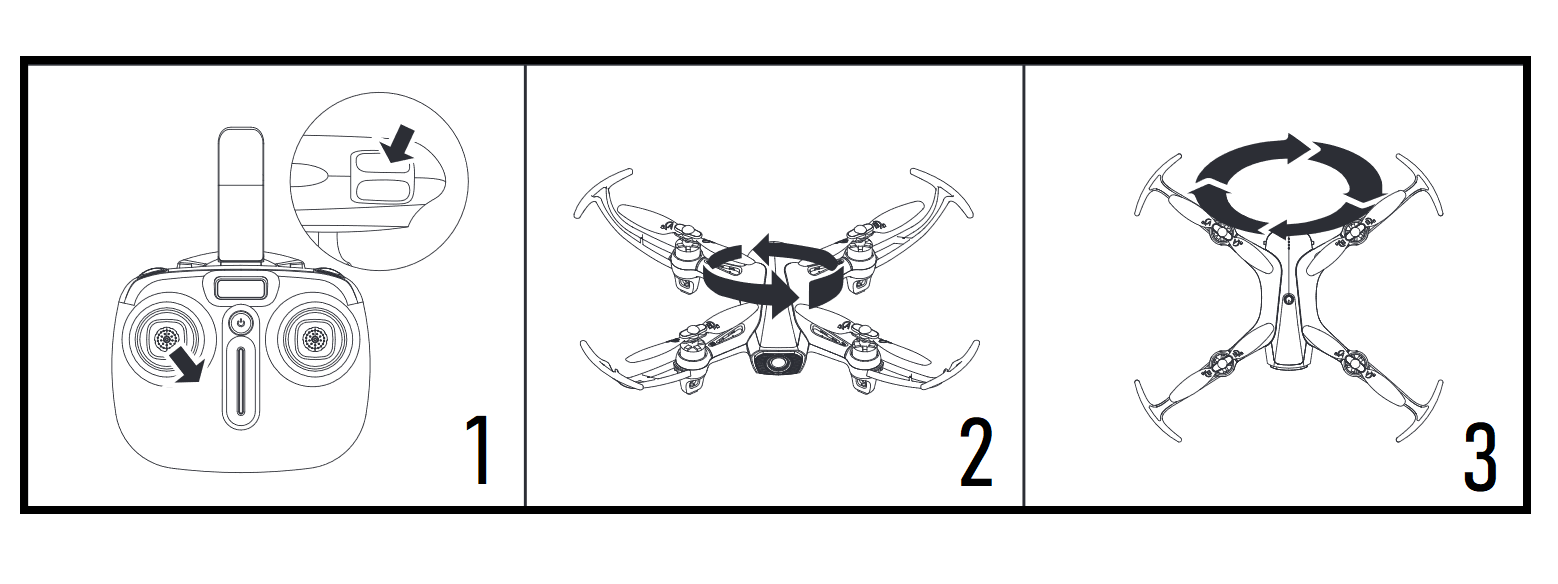
- 18.1 步骤 1. 陀螺仪校准
- 18.2 Step 2. 校准罗盘
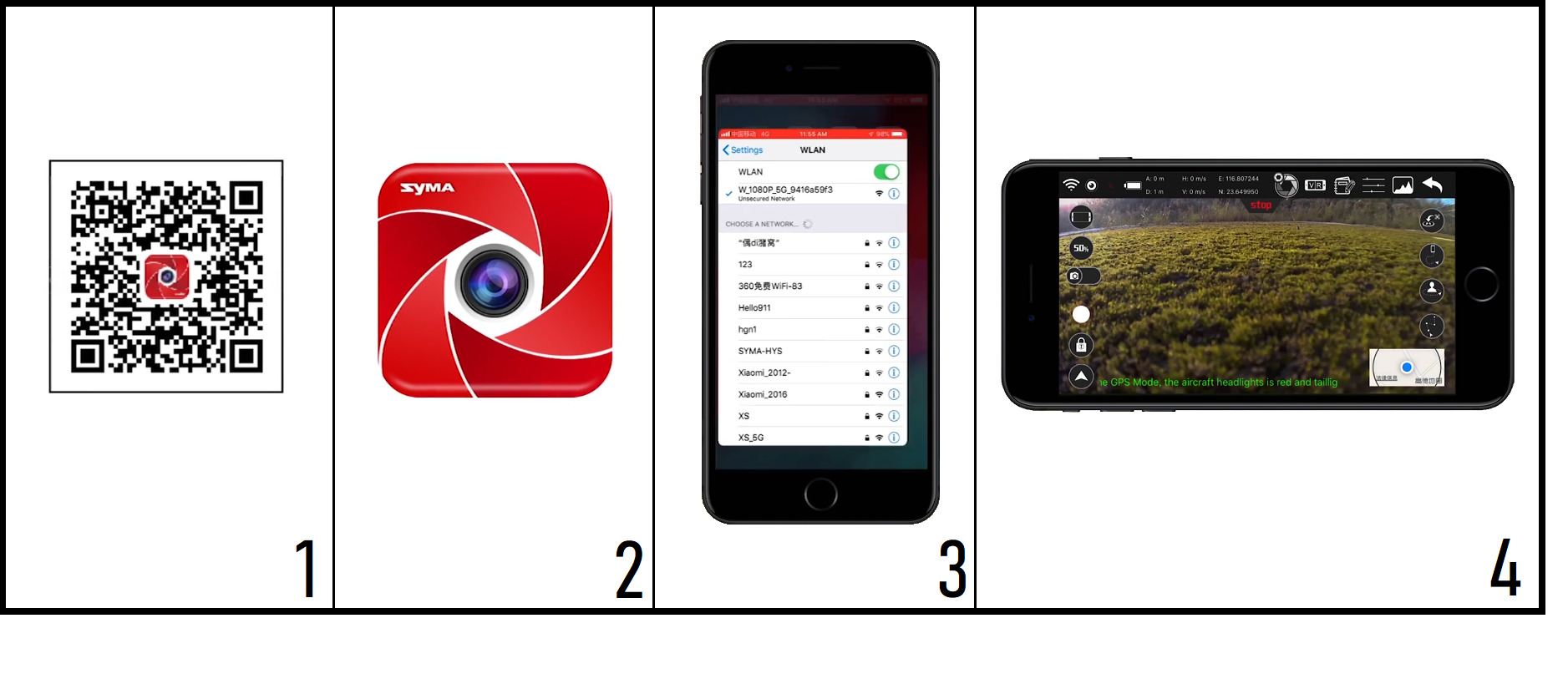
- 18.3 Step 3. 连接FPV摄像头
- 19 建议和注释
- 20 价格
- 21 结论
- 21.1 优点
- 21.2 缺点
- 22 视频
介绍
Syma W1 是 Syma Toys
目前,开发商正式将四轴飞行器以Syma W1 PRO的名义投放市场。
特点
- 重量(含电池) 249 g
- 便携设计和尺寸 (28.7 × 27 × 5.8cm)
- 定位:GPS 光学和气压传感器
- 带折叠螺旋桨的无刷动力装置
- 5MP 1080P FPV 摄像头
- 720P 底部摄像头
- 自动起飞/着陆
- 保持位置
- 飞行时间 18 分钟
- FPV 距离 250 m
- 可切换 FPV 频率范围:2.4GHz / 5GHz
- 控制:智能手机;智能手机遥控器
- 4 × 自动飞行和捕捉模式(跟我 / 圈 / 飞行计划 / 航点飞行)
- 手势控制(照片 / 视频)
- 控制无人机用手势
- 自动返回起飞点RTH模式(飞行器将返回起飞点并降落:遥控器和无人机之间信号丢失的情况/不足的情况电池充电/由用户使用遥控器上的按钮强制)
- 模式“ Headless ”
- 可变流量(功率)50/100%
- 初学者模式
- SYMA AIR 移动应用程序(支持剪辑片段;适合与社交网络互动)
选项
Syma W1 (PRO) 四轴飞行器由唯一配置中的开发人员:
- Drone
- 可充电电池 2S 7.4V 1800 mAh LiPo
- 控制面板
- USB 充电线
- 4 × 备用螺旋桨 (2CW / 2CCW)
- 保护螺丝
- 智能手机支架
- 用户手册(英文 / 中文 / 俄文

)规格【152】【151】【153】【154】无人机【154】【153】【155】【156】品牌:【156】【155】【157】司马【157】(158)【159】(160) )型号:【160】【159】(161)W1(PRO)【161】(162)(163)(164)尺寸(长×宽×高):【164】【163】(165)28.7×27× 5.8 厘米对角线尺寸: 215 毫米重量(含电池): 249 gr马达: 无刷; 1815 2400KV飞行时间: 18 分钟距离 FPV 去除: 250 m(控制遥控智能手机时)工作。 FPV 频率范围: 2.4GHz / 5GHz(可在 SYMA AIR 应用程序菜单中更改)工作范围。温度: 5℃~40℃卫星定位: GPS触摸定位: 光学气压传感器
相机
) eff 的数量。像素: 5 百万静止图像模式: 单张) 视频分辨率: FHD: 1920 × 1080 @ 25 fps HD: 1280 × 720 @ 25 fps静止图像分辨率: 1920 × 1080视频格式: MP4照片格式: JPG支持的 SD 卡类型: MicroSD (单独购买);最大。容量:64 GB; 10 级或 UHS工作范围温度: 5°C 至 40°C
控制面板
奴隶。频率范围: 2.4GHz信号传输距离:【249】【248】(250)250米【250】(251)(252)(253)充电电压/电流:【253】【252】(254)5V/3A【254】(255)电源: 4 × АА(单独购买)
支持的生物的大小。设备: 长度:92 毫米
工作范围。温度: 5℃至40℃无人机电池
容量: 1800 mAh
电压: 7.4V
电池类型: LiPo 2S
工作范围。温度: 5 ° C 至 40 ° C
应用程序
应用程序: SYMA AIR
支持的操作系统: iOS / Android
推荐智能手机操作系统: iOS 11/12
Android 9 / 10/11外观
高度执行的模型。它以高质量的包装到达消费者手中。套件的所有元素都包装在单独的盒子中。正如他们所说,一件小事,但很好。





)电机
Syma W1 (PRO) 四轴飞行器配备1815 2400KV 无刷电机,由调速器控制,支持自动制动和旋转阻塞功能,从而确保操作更安全。它们与可折叠螺旋桨协同工作,以增加便携性。在实践中,在最大设置下,由于道具的不平衡而略微表现出振动。一般来说,一个经过良好调整的发电厂,即使在有风的天气中驾驶,其潜力也很大。

摄像机
5MP FHD FPV 摄像机负责拍摄和第一人称视角。提供视频分辨率:1920×1080p@25fps;照片:5MP。没有图像稳定功能。在实践中,拍摄的质量与规格中所述相符,色彩还原良好。在中等驾驶模式下,没有果冻/振动,在“气体到地板”模式下,您可以定期观察果冻。它是通过平衡螺旋桨来处理的。由于经过精心调整的推进系统,在悬停模式下,您可以获得非常好的图像质量(对于预算小众的无人机)。

下腔室
在无人机上还有另一个位于其下部的摄像头,对于该型号,该摄像头执行双功能。首先,这是保持一个位置,例如,当卫星定位不可用或飞行在室内进行时(它与气压传感器协同工作;它在距地面最远 10 米的距离处被激活)),它也可以用作 FPV 相机。根据开发者的规格,它提供 1280 × 720p 分辨率、25 fps 的拍摄。实际上,质量远非720P,因此较低的相机仅与澄清着陆点有关。

在摄像机之间切换
您可以通过两种方式在摄像机之间切换:使用遥控器上的按钮(请参阅“分配遥控器上的按钮” 下方部分)。
保存照片/视频
可以在配对的智能手机内存和 microSD 卡(单独购买)中保存拍摄的照片/视频素材, 端口

FPV
W1 (PRO) 的第一人称飞行可以通过 Wi-Fi 在两个可用的选择之一上实现频段 2.4 GHz / 5 GHz(可在 移动应用程序

为确保在 FPV 模式下舒适飞行,与无人机配对的智能手机(iOS / Android)具有推荐的版本非常重要操作系统(参见上文的“移动应用程序规范” 部分)和智能手机的 Wi-Fi 模块支持在双频段 2.4 GHz / 5 GHz 下运行。实际上,最好的广播质量是在 5 GHz 频段实现的。 2.4 GHz 频段的广播通常以最差的质量进行,有时根本不允许在 FPV 模式下进行导频。
同样值得注意的是,为了保证视频流的播放延迟最低,建议将拍摄的素材单独保存到安装在具有推荐性能的无人机中的 microSD(参见(参见上文的摄像机规格部分(354))。
应该理解,Syma W1 (PRO) FPV 系统建立在最简单的技术之上,专为初步熟悉第一人称飞行而设计.因此,将其移出视线将需要您自担风险和风险。
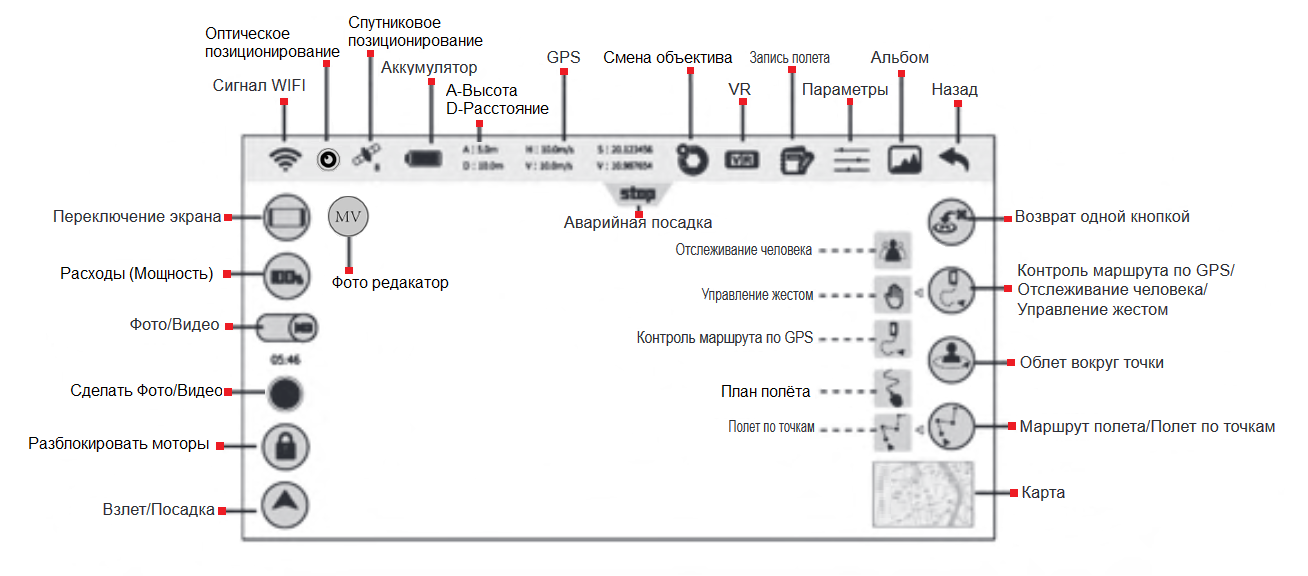
移动应用程序界面
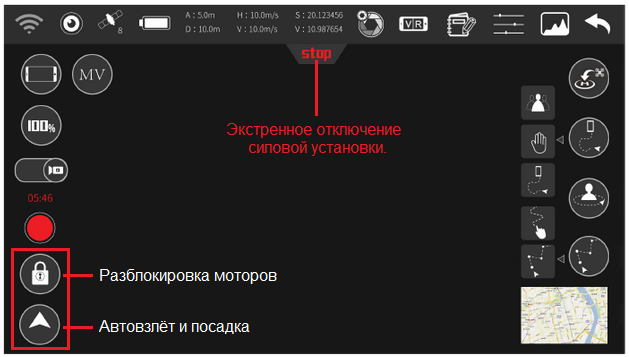
FPV 模式下的 SYMA AIR 移动应用程序界面。
MV 编辑器
手机应用程序提供照片编辑器,点击“MV”即可进入图标。允许用户快速编辑从无人机接收到的照片素材,并通过各种社交媒体进行分享。网络。
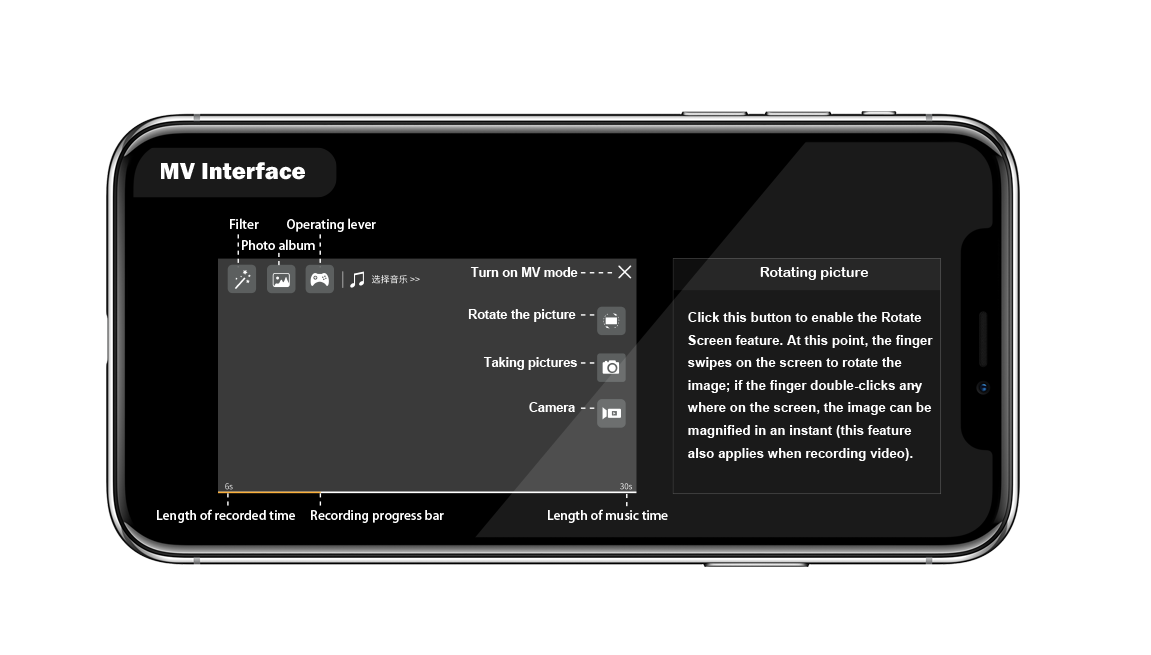
* SYMA AIR 应用程序中的照片编辑器界面。
Headless Mode
Headless Mode - 允许新手用户在驾驶训练的第一阶段不用担心四轴飞行器在前面的位置和位置回来。尽管如此,建议尽量减少此模式下的引导时间,或完全排除使用它。这种方式将对未来的整体驾驶质量产生积极影响,而且这种模式在更昂贵的型号/赛车无人机上不可用。

开/关模式
为了正确操作该模式,在打开电源之前,将无人机安装在后部严格控制设备部分,然后启动电机并打开模式。无头模式通过长按右侧控制杆(约 2 秒)激活,并伴有一系列 3 声信号。当该模式处于活动状态时,控制面板会不断发出短促的哔哔声(您无法关闭闹钟)。关闭模式与开启方式相同,长按右摇杆(约2秒)并伴随一声长鸣。
成本
如果需要,用户可以改变无人机的功率(成本/活动)。有两个选项可用:50% 和 100%。有限的 50% 功率潜力最适合初学者或需要从拍摄中获得最佳质量的情况,因为在这种情况下,无人机会变得更慢、更流畅。最高 100% 支出解锁全部动力潜力,无人机变得更加敏锐,对摇杆运动的反应变得更加敏锐。

转换成本
转换成本在移动应用程序菜单中进行(参见“移动应用程序界面”部分) 386) 上面),或短按右摇杆,然后发出声音信号,其中一声短哔声对应 50% 的输出功率,两声短哔声对应 100%。
初学者模式
初学者模式 - 默认设置。在此模式下,max 等参数。高度和最大值无人机的距离限制为 30 米。在“参数”部分的移动应用程序“SYMA AIR”菜单中禁用(参见“Interface mob.附件”

自动起飞和降落
自动起飞和降落功能可以通过控制器上的按钮实现面板(参见下方的“用途遥控按钮” 部分)和移动应用程序(参见
自动模式
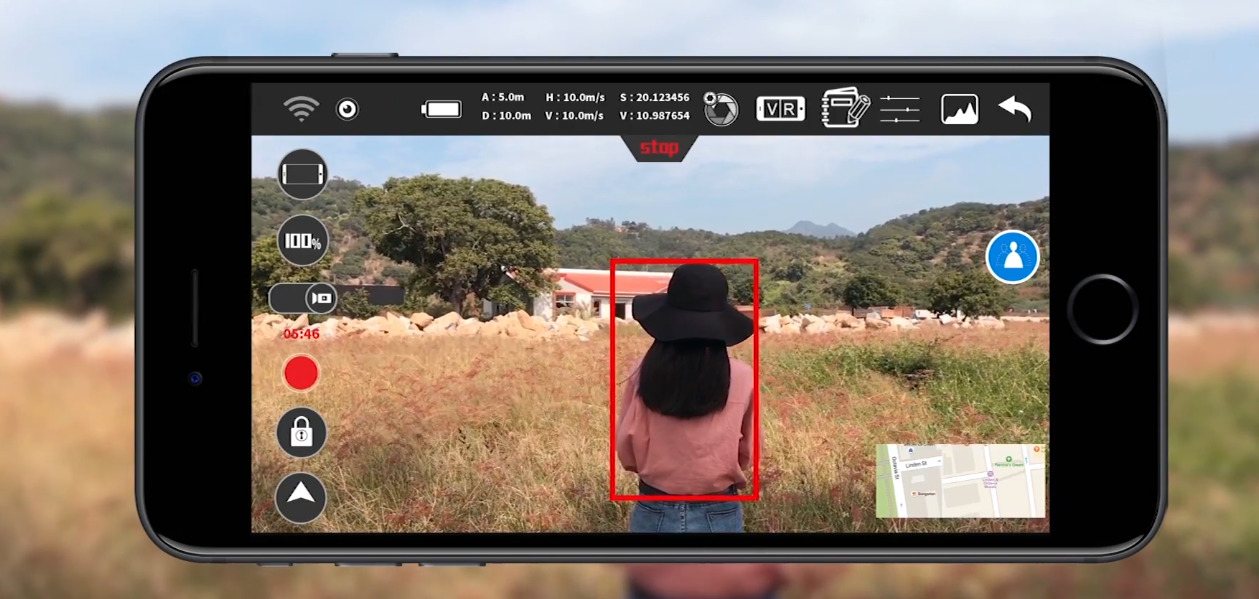
智能跟随模式
有两个选项可用:
人员跟随模式或人员跟踪 - 允许您在智能手机屏幕上选择要拍摄的对象,然后无人机会跟随它。激活该模式后,无人机将使用光学和气压传感器进行定位,卫星定位将变为非活动状态。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
GPS 跟随模式或 GPS 跟踪 - 在此模式下,无人机系统将跟踪智能手机的 GPS 模块,因此无人机将跟随配对的无人机智能手机。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
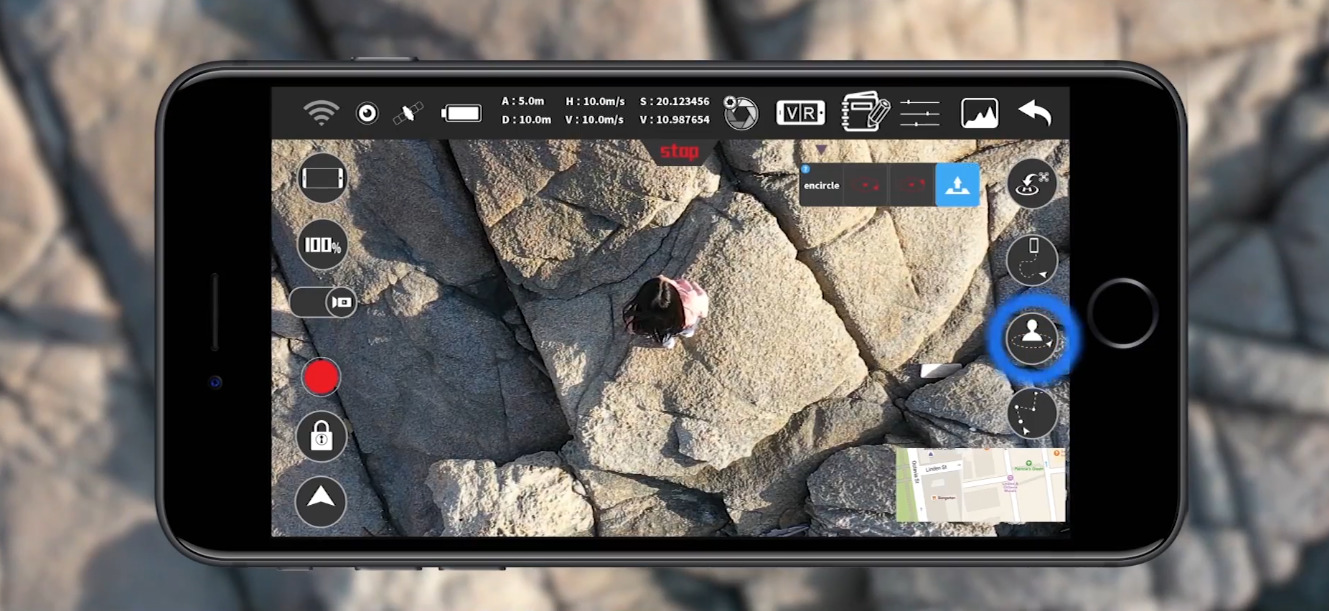
圆形模式
圆形模式或环绕飞行 - 该模式在卫星处于活动定位时工作。要正确地绕着物体飞行,在激活它之前,您必须启动无人机并将其放置在选定的物体上。然后,在移动应用程序中,点击图标“圆形模式/环绕飞行(参见“移动应用程序界面”上方的“(414)”部分)并选择添加。菜单“键入以跟踪/旋转方向”,然后点击“开始”。无人机将围绕物体飞行一圈,然后悬停以期待下一个命令。使用控制杆,设置飞行高度(左杆)和到物体的距离(右杆)。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
飞行计划
飞行计划 - 光学定位(GPS 定位未激活)。将无人机发射到空中。在移动应用程序中,点击“飞行计划”图标(参见上文 部分“移动应用程序界面”(421))。在屏幕上出现的字段中,用手指绘制飞行路径。要调整飞行高度,您可以使用遥控器上的左侧操纵杆或应用程序中的虚拟操纵杆(位于用于绘制飞行路径的字段左侧)。无人机将按照绘制的轨迹飞行,在路线的尽头悬停以等待用户的下一个命令。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。

航点飞行
航点飞行 - GPS 在航点飞行模式定位中处于活动状态。将无人机发射到空中。在移动应用程序中,点击“航点飞行”图标(参见上文 部分“移动应用程序界面”(428))。在出现的地图上,用手指放置路线航点并点击“启动”图标(请参阅上面的“移动应用程序界面”部分)。无人机将根据 GPS 设置的点飞行,并在路线的尽头悬停等待进一步的命令。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。

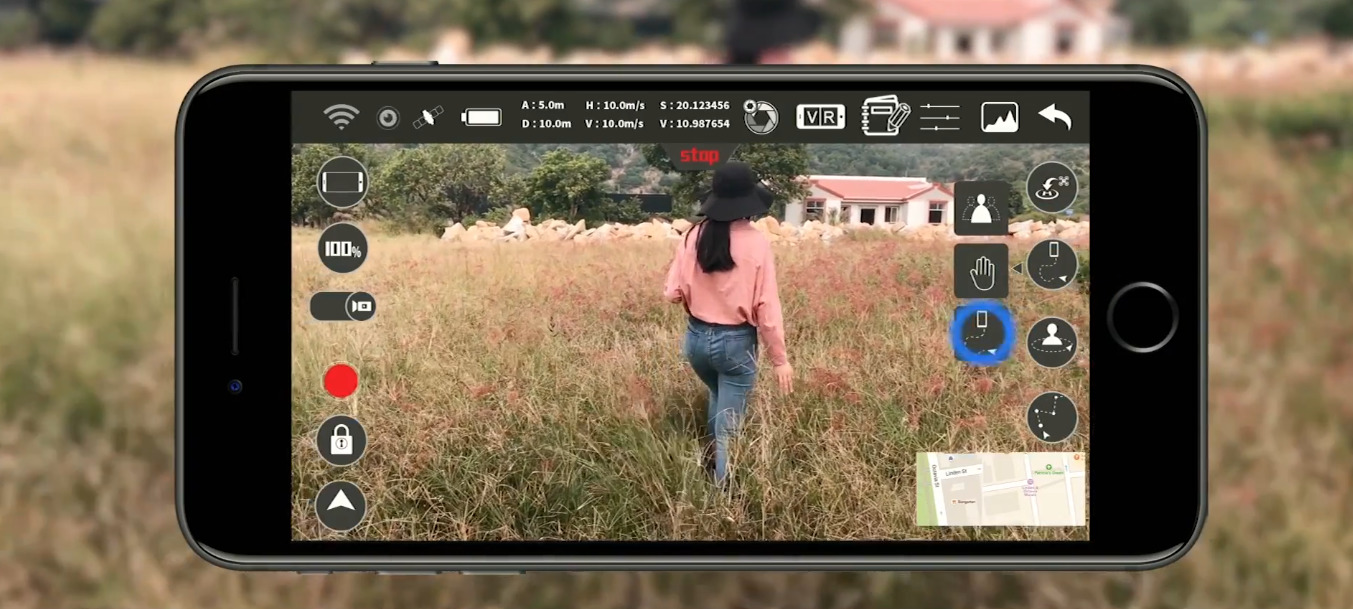
无人机的手势控制
手掌控制 - 发射无人机并站在无人机前距离 1.5 米的摄像头。在移动应用程序菜单中激活掌上控制模式。在镜头前伸手,手掌在前,手指并拢。查看配对智能手机的显示屏,等待(约 3 秒)无人机通过用红色矩形标记其手掌来识别手势。无人机后梁上的灯也会变成红色。然后,左右移动你的手掌,上下移动,无人机将沿其方向旋转/移动。无人机手势控制模式工作在光学定位模式,GPS未激活。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。

用手势控制拍摄
您可以通过遥控器上的按钮控制拍摄(参见“按钮分配”部分, 下方部分)。使用手势控制拍摄,您需要:
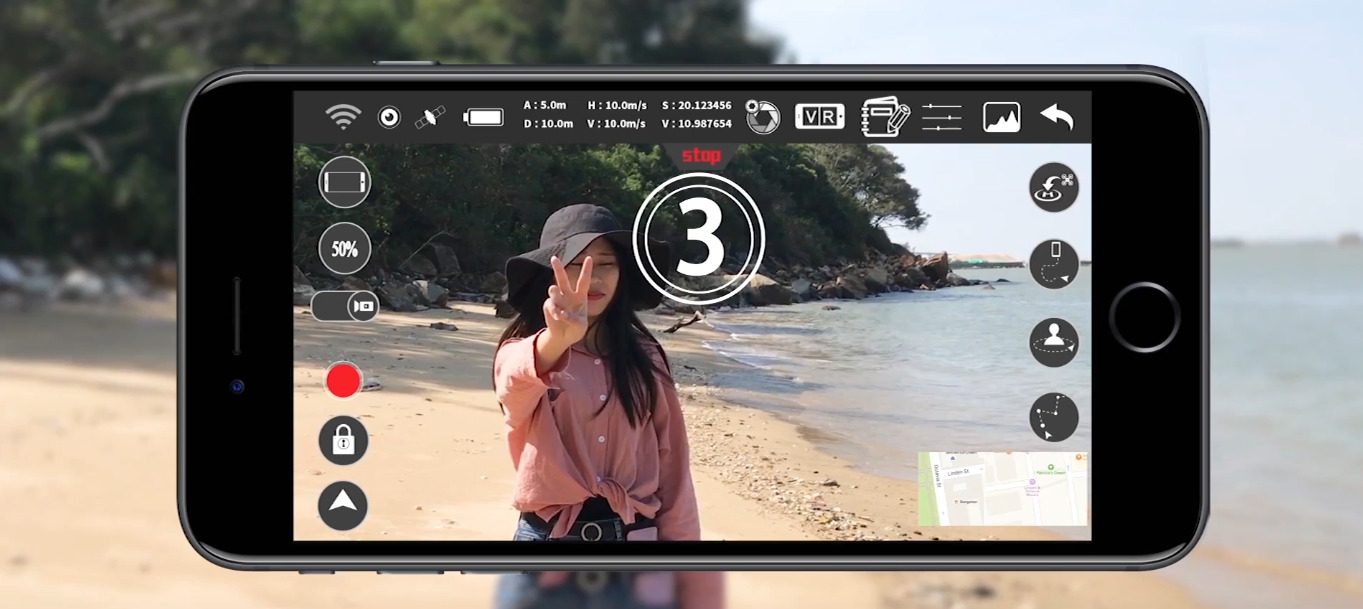
照片 - 使用手势拍照,发射无人机并站在无人机相机前1.5米的距离.伸出手展示无人机(3秒内),即所谓的“(444)胜利手势-✌”,之后配对的智能手机显示屏会倒计时三秒,无人机背光在后面光束会发出短暂的闪光,这将指示自动执行的照片。
视频 - 以手势开始拍摄,发射无人机并站在无人机摄像机前 1.5 米的距离。伸出你的手,向无人机展示(在 3 秒内)(449)你的手掌- 之后无人机在后光束上的照明将发出双闪,这将指示视频录制自动开始。要停止录制,再次抬起手掌并按住无人机镜头,录制将自动停止。

应该理解,每种自动模式/手势识别的操作质量在性能质量上明显低于高级无人机模式,因此,仅与第一次相识有关,仅此而已。
RTH 模式
返航模式 (RTH) - 允许您将无人机返回起飞位置.飞行器返回起飞点有三种选择,其中两种是自动的(返回功能在以下情况下自动启动:无人机与遥控器失去通信;无人机电池电量低时).也可以通过按下遥控器上的按钮来手动/强制激活返回(参见下方的“遥控器按钮的分配” 部分),或通过点击移动应用程序上的图标“一键返回”(参见移动应用程序界面部分,
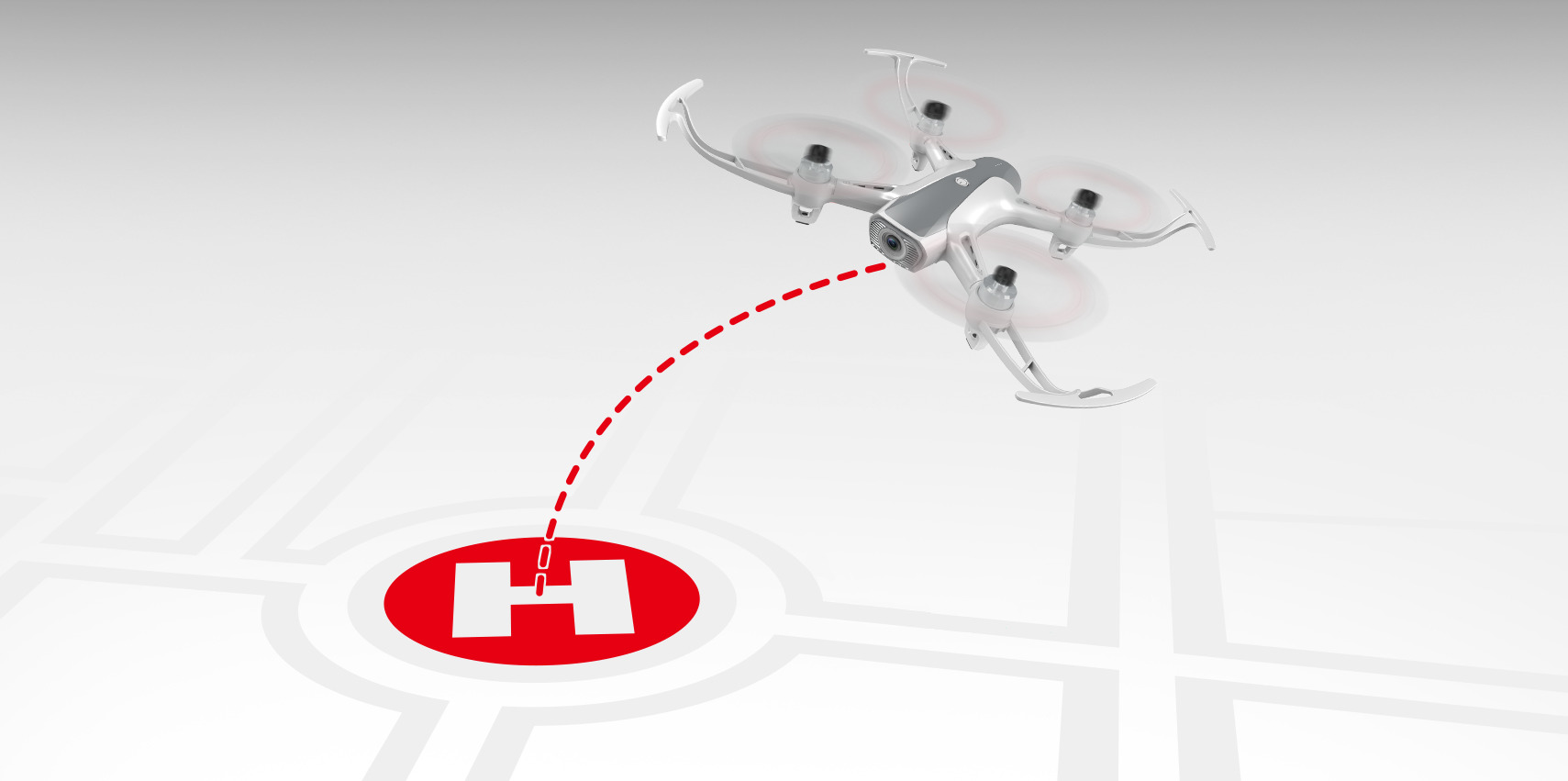
但是需要注意的是,为了执行返回模式,卫星通信必须处于活动状态,否则将无法返回可能,然后无人机将直接自动降落在它所在的地方,随后关闭电机。
电源
Syma W1 (PRO) 的电源由两罐 (2S; 7.4V) 锂聚合物 (LiPo) 实现可充电电池 1800 毫安。电池装在不可拆卸的盒子中,不需要连接电源线进行连接,只需将其插入,直到闩锁卡入(469)无人机电池舱 。这种方法为电源提供了额外的保护,并且还可以快速更换它(无需电线:“插入式”)。一切都是为了简单!根据开发商的规格,电池提供的最长飞行时间为 18 分钟。在实践中,这个时间是 10-12 分钟,具体取决于驾驶模式和风等外部环境因素。

正在充电
正在使用随附的 USB 充电器为电池充电。充电时间约为 3.5 小时。充电过程中,“绿”灯慢闪,“红”灯常亮。两个指示灯持续亮起表示充电结束。如果未连接电池或未进行充电,则“红色”指示灯常亮,“绿色”指示灯熄灭。发生错误时,“红色”指示灯常亮,“绿色”指示灯快速闪烁。开发人员建议不要从计算机等的 USB 端口为电池充电。充电时,建议使用 电源
让我们归因于以下事实:电池电量指示和用于打开和关闭无人机的按钮。但是,最好在最后一次飞行后取出电池并将其与飞机分开存放。
控制

* 不包括智能手机。
无人机控制
遥控器按钮的分配
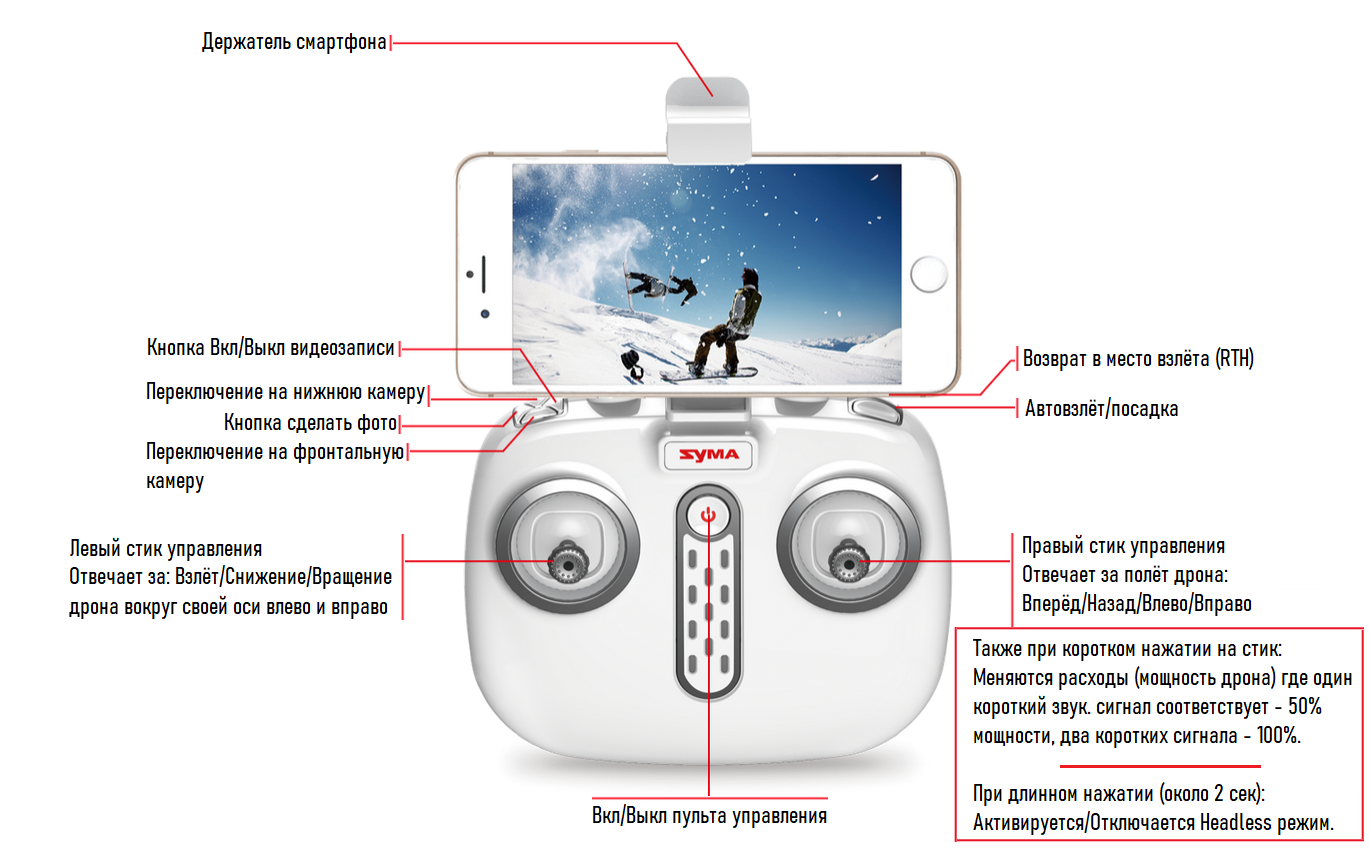
首先启动
从遥控器上取下后盒子,充电电池和螺旋桨保护,第一次激活将始终与无人机的陀螺仪和指南针的强制校准相关联。您可以通过两种方便的方式开始校准过程:从控制面板,或通过 SYMA AIR 移动应用程序中的视觉分步说明(使用二维码快速下载)。
在我们看来,启动校准过程的最简单和最快的方法是远程控制。通过应用程序进行的校准程序以及 Syma W1 (PRO) 无人机的其他功能可以在来自开发者的这个 视频 中找到。
步骤 1. 陀螺仪的校准
第一步是校准陀螺仪(或如在手动“无人机水平位置校准”):
- 将飞机放在水平面上(重要)。
- 打开控制面板。
- 打开无人机(双击,第一秒短,下一秒长(约 3 秒))。打开无人机将显示配乐。无人机上的背光灯会快速闪烁。
- 将遥控器上的左摇杆上下移动一个动作(此过程会将遥控器与无人机联动)。无人机上的背光将变为稳定的发光。
- 将两个控制杆以一个动作移动到右下角并保持在那里。无人机的背光首先会频繁闪烁,然后进入常亮模式,这将表明陀螺仪校准过程结束。
- 您可以进行罗盘校准。

步骤 2. 校准罗盘
罗盘。为此,请执行以下操作:
- 要开始校准过程,请在遥控器上将左控制杆移动到右下角并按返回按钮(请参阅“分配遥控器”部分控制按钮”(518)在上方)。
- 飞机背光慢闪将指示校准模式开始。
- 将无人机保持在水平位置,开始围绕其轴旋转(方向不重要),直到无人机的照明开始快速闪烁(通常约为 2-3 圈)。
- 现在将无人机移动到垂直位置,相机向下,并开始围绕其轴旋转,直到无人机的照明切换到恒光模式。
- 指南针校准完成,您可以继续将智能手机与无人机的相机配对。
步骤 3. 连接 FPV 摄像机
执行以下操作:
- 在您的智能手机上激活 Wi-Fi。
- 进入智能手机的Wi-Fi设置,从可用网络列表中选择:W_1080P_XG_XXXXXXXXX(其中XG为可用的2.4G或5G频段;XXXXXXXXX为个人连接码,不同的每部智能手机);不需要密码。
- 连接到 FPV 摄像机的 WiFi 热点后,启动应用程序。点击右下角的“ 准备
- 智能手机屏幕上显示的实时视频流将指示与无人机相机的连接。
- 配对过程结束。
- 您可以开始起飞(如何启动/停止电机并熟悉控制方案,请参阅下面的建议)。
建议和说明
一般
- 之前使用产品时,请务必阅读使用说明。
- 建议先开启控制器,再开启无人机。
- 飞行结束后,建议先关闭遥控器电源,再关闭无人机电源。
- 如果飞机机身倾斜超过 70 度,飞机将关闭。
FPV
- 无人机的 FPV 系统对连接到无人机的智能手机的操作系统极为敏感(请参阅“移动应用程序”规范以上),因此,如果智能手机操作系统未包含在推荐列表中,那么以第一人称模式飞行将不舒服甚至不可能。
- FPV 飞行的推荐 Wi-Fi 频率范围被认为是 5GHz。已更改 移动应用程序菜单
- 为确保播放视频流的延迟最低,建议将拍摄的素材专门保存在具有推荐性能的无人机中安装的 microSD 中(请参阅上面的“规格”部分)。
电源
- 在正常电池条件下,最大移除距离约为 200 米,最大高度约为 70 米。
- 电池电量不足,最大航程和飞行高度约20米。
- 使电池远离高温。将它们存放在远离加热设备的地方。
- 当无人机不使用时,断开无人机和控制器的电源。
- 如果超过10天不使用无人机,为了延长无人机电池的使用寿命,请将电池充电至其满容量的40-50%。
- 要从 220V 网络为电池充电,开发人员建议使用 5V (1-2A) 电源。不建议从计算机给电池充电。
- 不建议在遥控器中安装电池。
- 在下次飞行后开始充电之前,您需要让电池冷却。电池只能在成人在场的情况下充电。如果使用不当,电池可能会爆炸!
- 飞行前,请确保飞行器电池安装正确,否则即使短暂断电也可能影响飞行安全。
- 为了控制设备(控制台)的不间断和正确运行,不允许新旧电池混用,或者碱性电池与普通电池或充电电池。
螺旋桨 - 为了正确安装螺旋桨,请注意螺旋桨和无人机臂上的标记 (A / B)。它们必须相同。否则,无人机将无法起飞。
电机
- 如果无人机的动力装置碰到障碍物或干扰螺旋桨旋转的东西,过流保护和四轴飞行器电机将运行关掉。
- 有两种方法可以从遥控器和通过 mob 界面启动和停止电机。应用:
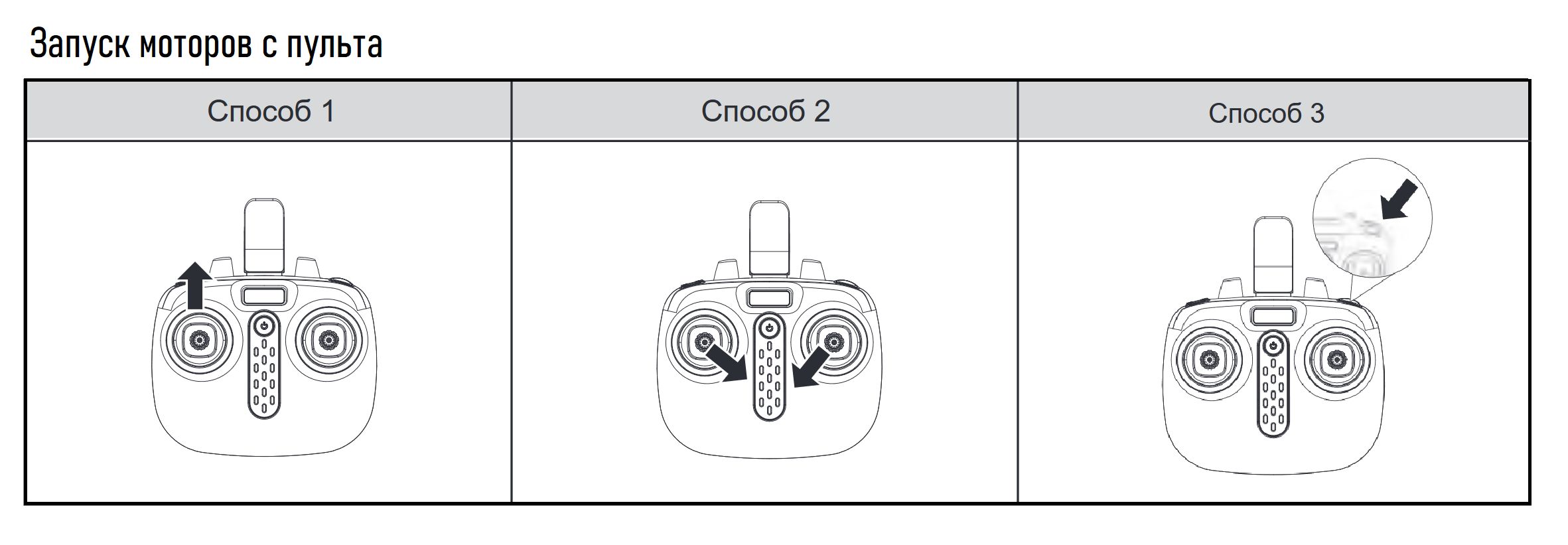
远程启动
- 向上移动左油门杆。
- 同时,将左操纵杆移至右下角,将右操纵杆移至左下角并保持该位置1 秒钟。
- 将无人机放在水平表面上,然后按下遥控器上的自动起飞/着陆按钮(参见上面的遥控器按钮分配 )。电机将启动,无人机将自动起飞至约 1.5 米的高度并悬停。
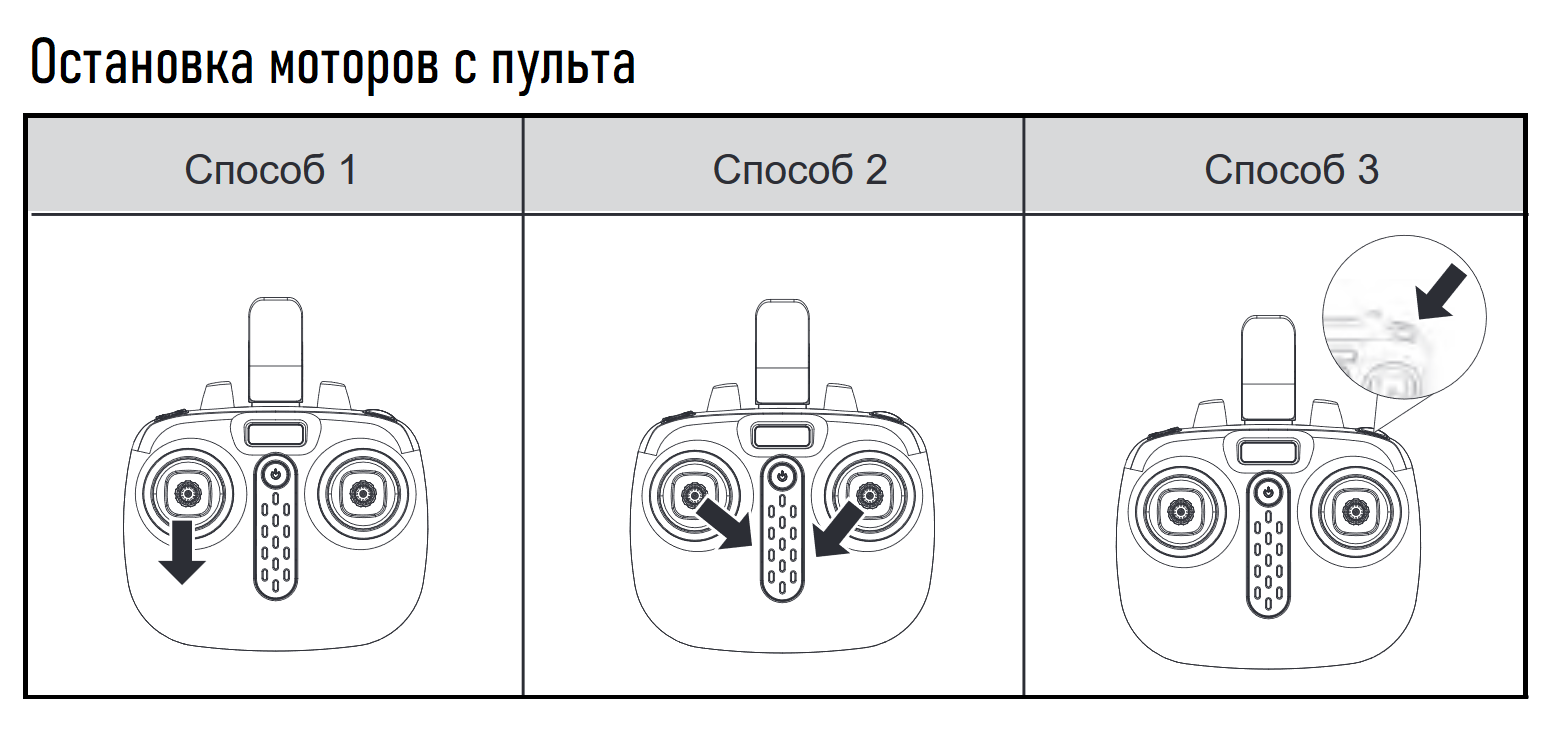
远程停止
- 向下移动左油门杆并保持 2-3 秒。
- 同时,将左摇杆/操纵杆移至右下角,将右摇杆移至左下角并保持该位置1秒钟。
- 飞行器悬停时,按遥控器上的自动起飞/着陆按钮(见上面“分配遥控按钮”(588)部分)将自动着陆并关闭电机。
通过暴徒停止和启动马达。应用程序
RTH
- 请注意,在返航 / RTH 模式下,无人机不会绕过障碍物飞行...
- 如果无人机距离起飞点超过20米,它会自动爬升到20米的高度,然后返回起飞点。
- 如果无人机距离起飞点不到 20 米,它将返回,并保持飞行时的当前高度。
- 如果来自控制面板的信号中断超过 6 秒,控制系统将激活起飞模式。如果在返航过程中遥控器信号恢复,返航过程将继续,但用户可以使用遥控器上的返航按钮取消返航模式(参见“分配遥控器按钮”部分) (601))并恢复控制无人机。
- 如果没有 GPS 信号,飞行器将不会返回起飞位置。如果在无人机和遥控器失去通信的那一刻没有卫星信号,飞行器不会飞到起飞地点,而是软着陆,随后电机被阻塞。
- 当电池电压下降到临界值时,飞行器灯会慢闪,并自动启动返航功能。返航过程中,为了避免与障碍物碰撞,用户可以控制无人机(爬升和下降,左转和右转)。
- 如果由于电池电压低而执行 RTH 模式,则无法取消自动复位。
陀螺仪校准
- 在第一次开始之前执行一次水平位置校准过程。如果在保持位置时无人机停止保持地平线并不断移动(例如没有外部因素的帮助,例如风),则需要重新校准,这通常发生在坠落/坠毁之后无人机。
- 如果飞机机身的倾斜角度超过 10 度,将无法进行水平位置校准。
校准指南针
- 建议在每个新发射场以及飞机无法定位卫星时校准指南针很长一段时间。
- 请勿在强磁场中或大型金属结构附近校准指南针。
- 罗盘校准时水平旋转时,与飞机机身水平位置的偏差角度不应超过30度。
GPS 定位
- 在室内飞行时,卫星定位模式不起作用。
- 当卫星定位未激活时,左上角应用程序中的指示器(以卫星的形式)为红色并闪烁(参见上方的移动应用程序界面,(621))。
- 卫星定位强,无人机前光束LED常亮红色,后光束LED常绿。
- 当飞机尾灯由黄色变为绿色时,表示检测到足够多的卫星并成功记录返航点。之后,无人机使用GPS定位功能即可起飞。
- 在第一次发射时,搜索卫星大约需要一分钟。如果无人机长时间找不到卫星,请重复指南针校准程序。
- 如果飞行器的尾灯在飞行过程中呈绿色闪烁,则表示 GPS 信号较弱。在这种情况下,建议停止飞行并等待检测到足够数量的卫星。
光学定位
- 光学定位未激活时,应用程序左上角(镜头类型)中的指示灯闪烁
] - (参见上方的移动应用程序接口部分, )。
- 定位飞行器光学系统时,无人机前光束上的 LED 灯始终为红色,后光束上的 LED 灯始终为黄色。
- 当飞行器后光束呈黄色闪烁时,表示光学定位系统无法正常工作。
- 光学定位系统不能在弱光、均匀或反射表面、水面和超过 10 米的高度运行。
无头模式
- 启用时,飞行器指示灯每 4 秒闪烁一次。
- 为了正确操作该模式,在打开电源之前,将无人机安装好,将其尾部准确地放在遥控器上。
拍照
- 按“拍照”按钮 - 无人机上的照明将与拍摄照片的闪光灯重复。
- 按下“视频”按钮 - 无人机上的背光灯将闪烁,表示正在录制视频。如果停止录像,飞行器灯会恢复常亮模式,表示录像已停止。
价格
Syma W1 PRO 四轴飞行器由开发商通过大多数知名互联网市场以 143.99 美元的价格出售.

输出
Syma W1)$143.99 )7.7777777777778价格7/10 ]
)7.7777777777778价格7/10 ]
摄像头8/10
功能8/10
飞行时间5/10)
飞行性能8/10
紧凑性7/10
选项10/10
)可靠性8/10
价格/质量10/10
优点
- 便携式设计和尺寸
- 产品质量
- 自锁无刷电机
- 可折叠螺旋桨
- 飞行性能(动态/稳定))
- 定位精度(GPS 光学和气压传感器)
- FHD FPV 摄像机
- FPV 5GHz(250 米中最多 200 米)
- 价格
缺点
- 没有 4K 摄像机
- 没有 EIS
- 智能功能无法正常工作
]- FPV 系统与老一代智能手机不兼容(仅具有最新操作系统版本的现代设备)
- 螺旋桨需要平衡
另一个可行的预算选项,专为那些发现在掌握了在 收集器二次曲面照片和视频拍摄
视频
开发者关于无人机主要功能以及如何使用 Syma W1 (PRO) 的视频。
。
无人机电池
应用程序
Android 9 / 10/11
外观
高度执行的模型。它以高质量的包装到达消费者手中。套件的所有元素都包装在单独的盒子中。正如他们所说,一件小事,但很好。
)电机
Syma W1 (PRO) 四轴飞行器配备1815 2400KV 无刷电机,由调速器控制,支持自动制动和旋转阻塞功能,从而确保操作更安全。它们与可折叠螺旋桨协同工作,以增加便携性。在实践中,在最大设置下,由于道具的不平衡而略微表现出振动。一般来说,一个经过良好调整的发电厂,即使在有风的天气中驾驶,其潜力也很大。
摄像机
5MP FHD FPV 摄像机负责拍摄和第一人称视角。提供视频分辨率:1920×1080p@25fps;照片:5MP。没有图像稳定功能。在实践中,拍摄的质量与规格中所述相符,色彩还原良好。在中等驾驶模式下,没有果冻/振动,在“气体到地板”模式下,您可以定期观察果冻。它是通过平衡螺旋桨来处理的。由于经过精心调整的推进系统,在悬停模式下,您可以获得非常好的图像质量(对于预算小众的无人机)。
下腔室
在无人机上还有另一个位于其下部的摄像头,对于该型号,该摄像头执行双功能。首先,这是保持一个位置,例如,当卫星定位不可用或飞行在室内进行时(它与气压传感器协同工作;它在距地面最远 10 米的距离处被激活)),它也可以用作 FPV 相机。根据开发者的规格,它提供 1280 × 720p 分辨率、25 fps 的拍摄。实际上,质量远非720P,因此较低的相机仅与澄清着陆点有关。
在摄像机之间切换
您可以通过两种方式在摄像机之间切换:使用遥控器上的按钮(请参阅“分配遥控器上的按钮” 下方部分)。
保存照片/视频
可以在配对的智能手机内存和 microSD 卡(单独购买)中保存拍摄的照片/视频素材, 端口
FPV
W1 (PRO) 的第一人称飞行可以通过 Wi-Fi 在两个可用的选择之一上实现频段 2.4 GHz / 5 GHz(可在 移动应用程序
为确保在 FPV 模式下舒适飞行,与无人机配对的智能手机(iOS / Android)具有推荐的版本非常重要操作系统(参见上文的“移动应用程序规范” 部分)和智能手机的 Wi-Fi 模块支持在双频段 2.4 GHz / 5 GHz 下运行。实际上,最好的广播质量是在 5 GHz 频段实现的。 2.4 GHz 频段的广播通常以最差的质量进行,有时根本不允许在 FPV 模式下进行导频。
同样值得注意的是,为了保证视频流的播放延迟最低,建议将拍摄的素材单独保存到安装在具有推荐性能的无人机中的 microSD(参见(参见上文的摄像机规格部分(354))。
应该理解,Syma W1 (PRO) FPV 系统建立在最简单的技术之上,专为初步熟悉第一人称飞行而设计.因此,将其移出视线将需要您自担风险和风险。
移动应用程序界面
FPV 模式下的 SYMA AIR 移动应用程序界面。
MV 编辑器
手机应用程序提供照片编辑器,点击“MV”即可进入图标。允许用户快速编辑从无人机接收到的照片素材,并通过各种社交媒体进行分享。网络。
* SYMA AIR 应用程序中的照片编辑器界面。
Headless Mode
Headless Mode - 允许新手用户在驾驶训练的第一阶段不用担心四轴飞行器在前面的位置和位置回来。尽管如此,建议尽量减少此模式下的引导时间,或完全排除使用它。这种方式将对未来的整体驾驶质量产生积极影响,而且这种模式在更昂贵的型号/赛车无人机上不可用。
开/关模式
为了正确操作该模式,在打开电源之前,将无人机安装在后部严格控制设备部分,然后启动电机并打开模式。无头模式通过长按右侧控制杆(约 2 秒)激活,并伴有一系列 3 声信号。当该模式处于活动状态时,控制面板会不断发出短促的哔哔声(您无法关闭闹钟)。关闭模式与开启方式相同,长按右摇杆(约2秒)并伴随一声长鸣。
成本
如果需要,用户可以改变无人机的功率(成本/活动)。有两个选项可用:50% 和 100%。有限的 50% 功率潜力最适合初学者或需要从拍摄中获得最佳质量的情况,因为在这种情况下,无人机会变得更慢、更流畅。最高 100% 支出解锁全部动力潜力,无人机变得更加敏锐,对摇杆运动的反应变得更加敏锐。
转换成本
转换成本在移动应用程序菜单中进行(参见“移动应用程序界面”部分) 386) 上面),或短按右摇杆,然后发出声音信号,其中一声短哔声对应 50% 的输出功率,两声短哔声对应 100%。
初学者模式
初学者模式 - 默认设置。在此模式下,max 等参数。高度和最大值无人机的距离限制为 30 米。在“参数”部分的移动应用程序“SYMA AIR”菜单中禁用(参见“Interface mob.附件”
自动起飞和降落
自动起飞和降落功能可以通过控制器上的按钮实现面板(参见下方的“用途遥控按钮” 部分)和移动应用程序(参见
自动模式
智能跟随模式
有两个选项可用:
人员跟随模式或人员跟踪 - 允许您在智能手机屏幕上选择要拍摄的对象,然后无人机会跟随它。激活该模式后,无人机将使用光学和气压传感器进行定位,卫星定位将变为非活动状态。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
![]()
GPS 跟随模式或 GPS 跟踪 - 在此模式下,无人机系统将跟踪智能手机的 GPS 模块,因此无人机将跟随配对的无人机智能手机。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
![]()
圆形模式
圆形模式或环绕飞行 - 该模式在卫星处于活动定位时工作。要正确地绕着物体飞行,在激活它之前,您必须启动无人机并将其放置在选定的物体上。然后,在移动应用程序中,点击图标“圆形模式/环绕飞行(参见“移动应用程序界面”上方的“(414)”部分)并选择添加。菜单“键入以跟踪/旋转方向”,然后点击“开始”。无人机将围绕物体飞行一圈,然后悬停以期待下一个命令。使用控制杆,设置飞行高度(左杆)和到物体的距离(右杆)。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
飞行计划
飞行计划 - 光学定位(GPS 定位未激活)。将无人机发射到空中。在移动应用程序中,点击“飞行计划”图标(参见上文 部分“移动应用程序界面”(421))。在屏幕上出现的字段中,用手指绘制飞行路径。要调整飞行高度,您可以使用遥控器上的左侧操纵杆或应用程序中的虚拟操纵杆(位于用于绘制飞行路径的字段左侧)。无人机将按照绘制的轨迹飞行,在路线的尽头悬停以等待用户的下一个命令。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
航点飞行
航点飞行 - GPS 在航点飞行模式定位中处于活动状态。将无人机发射到空中。在移动应用程序中,点击“航点飞行”图标(参见上文 部分“移动应用程序界面”(428))。在出现的地图上,用手指放置路线航点并点击“启动”图标(请参阅上面的“移动应用程序界面”部分)。无人机将根据 GPS 设置的点飞行,并在路线的尽头悬停等待进一步的命令。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
无人机的手势控制
手掌控制 - 发射无人机并站在无人机前距离 1.5 米的摄像头。在移动应用程序菜单中激活掌上控制模式。在镜头前伸手,手掌在前,手指并拢。查看配对智能手机的显示屏,等待(约 3 秒)无人机通过用红色矩形标记其手掌来识别手势。无人机后梁上的灯也会变成红色。然后,左右移动你的手掌,上下移动,无人机将沿其方向旋转/移动。无人机手势控制模式工作在光学定位模式,GPS未激活。重要!建议第一次飞行在一个大的空地进行,没有人和任何其他物体和障碍物。
用手势控制拍摄
您可以通过遥控器上的按钮控制拍摄(参见“按钮分配”部分, 下方部分)。使用手势控制拍摄,您需要:
照片 - 使用手势拍照,发射无人机并站在无人机相机前1.5米的距离.伸出手展示无人机(3秒内),即所谓的“(444)胜利手势-✌”,之后配对的智能手机显示屏会倒计时三秒,无人机背光在后面光束会发出短暂的闪光,这将指示自动执行的照片。
视频 - 以手势开始拍摄,发射无人机并站在无人机摄像机前 1.5 米的距离。伸出你的手,向无人机展示(在 3 秒内)(449)你的手掌- 之后无人机在后光束上的照明将发出双闪,这将指示视频录制自动开始。要停止录制,再次抬起手掌并按住无人机镜头,录制将自动停止。
应该理解,每种自动模式/手势识别的操作质量在性能质量上明显低于高级无人机模式,因此,仅与第一次相识有关,仅此而已。
RTH 模式
返航模式 (RTH) - 允许您将无人机返回起飞位置.飞行器返回起飞点有三种选择,其中两种是自动的(返回功能在以下情况下自动启动:无人机与遥控器失去通信;无人机电池电量低时).也可以通过按下遥控器上的按钮来手动/强制激活返回(参见下方的“遥控器按钮的分配” 部分),或通过点击移动应用程序上的图标“一键返回”(参见移动应用程序界面部分,
但是需要注意的是,为了执行返回模式,卫星通信必须处于活动状态,否则将无法返回可能,然后无人机将直接自动降落在它所在的地方,随后关闭电机。
电源
Syma W1 (PRO) 的电源由两罐 (2S; 7.4V) 锂聚合物 (LiPo) 实现可充电电池 1800 毫安。电池装在不可拆卸的盒子中,不需要连接电源线进行连接,只需将其插入,直到闩锁卡入(469)无人机电池舱 。这种方法为电源提供了额外的保护,并且还可以快速更换它(无需电线:“插入式”)。一切都是为了简单!根据开发商的规格,电池提供的最长飞行时间为 18 分钟。在实践中,这个时间是 10-12 分钟,具体取决于驾驶模式和风等外部环境因素。
正在充电
正在使用随附的 USB 充电器为电池充电。充电时间约为 3.5 小时。充电过程中,“绿”灯慢闪,“红”灯常亮。两个指示灯持续亮起表示充电结束。如果未连接电池或未进行充电,则“红色”指示灯常亮,“绿色”指示灯熄灭。发生错误时,“红色”指示灯常亮,“绿色”指示灯快速闪烁。开发人员建议不要从计算机等的 USB 端口为电池充电。充电时,建议使用 电源
让我们归因于以下事实:电池电量指示和用于打开和关闭无人机的按钮。但是,最好在最后一次飞行后取出电池并将其与飞机分开存放。
控制
* 不包括智能手机。
无人机控制
遥控器按钮的分配
首先启动
从遥控器上取下后盒子,充电电池和螺旋桨保护,第一次激活将始终与无人机的陀螺仪和指南针的强制校准相关联。您可以通过两种方便的方式开始校准过程:从控制面板,或通过 SYMA AIR 移动应用程序中的视觉分步说明(使用二维码快速下载)。
在我们看来,启动校准过程的最简单和最快的方法是远程控制。通过应用程序进行的校准程序以及 Syma W1 (PRO) 无人机的其他功能可以在来自开发者的这个 视频 中找到。
步骤 1. 陀螺仪的校准
第一步是校准陀螺仪(或如在手动“无人机水平位置校准”):
- 将飞机放在水平面上(重要)。
- 打开控制面板。
- 打开无人机(双击,第一秒短,下一秒长(约 3 秒))。打开无人机将显示配乐。无人机上的背光灯会快速闪烁。
- 将遥控器上的左摇杆上下移动一个动作(此过程会将遥控器与无人机联动)。无人机上的背光将变为稳定的发光。
- 将两个控制杆以一个动作移动到右下角并保持在那里。无人机的背光首先会频繁闪烁,然后进入常亮模式,这将表明陀螺仪校准过程结束。
- 您可以进行罗盘校准。
步骤 2. 校准罗盘
罗盘。为此,请执行以下操作:
- 要开始校准过程,请在遥控器上将左控制杆移动到右下角并按返回按钮(请参阅“分配遥控器”部分控制按钮”(518)在上方)。
- 飞机背光慢闪将指示校准模式开始。
- 将无人机保持在水平位置,开始围绕其轴旋转(方向不重要),直到无人机的照明开始快速闪烁(通常约为 2-3 圈)。
- 现在将无人机移动到垂直位置,相机向下,并开始围绕其轴旋转,直到无人机的照明切换到恒光模式。
- 指南针校准完成,您可以继续将智能手机与无人机的相机配对。
步骤 3. 连接 FPV 摄像机
执行以下操作:
- 在您的智能手机上激活 Wi-Fi。
- 进入智能手机的Wi-Fi设置,从可用网络列表中选择:W_1080P_XG_XXXXXXXXX(其中XG为可用的2.4G或5G频段;XXXXXXXXX为个人连接码,不同的每部智能手机);不需要密码。
- 连接到 FPV 摄像机的 WiFi 热点后,启动应用程序。点击右下角的“ 准备
- 智能手机屏幕上显示的实时视频流将指示与无人机相机的连接。
- 配对过程结束。
- 您可以开始起飞(如何启动/停止电机并熟悉控制方案,请参阅下面的建议)。
建议和说明
一般
- 之前使用产品时,请务必阅读使用说明。
- 建议先开启控制器,再开启无人机。
- 飞行结束后,建议先关闭遥控器电源,再关闭无人机电源。
- 如果飞机机身倾斜超过 70 度,飞机将关闭。
FPV
- 无人机的 FPV 系统对连接到无人机的智能手机的操作系统极为敏感(请参阅“移动应用程序”规范以上),因此,如果智能手机操作系统未包含在推荐列表中,那么以第一人称模式飞行将不舒服甚至不可能。
- FPV 飞行的推荐 Wi-Fi 频率范围被认为是 5GHz。已更改 移动应用程序菜单
- 为确保播放视频流的延迟最低,建议将拍摄的素材专门保存在具有推荐性能的无人机中安装的 microSD 中(请参阅上面的“规格”部分)。
电源
- 在正常电池条件下,最大移除距离约为 200 米,最大高度约为 70 米。
- 电池电量不足,最大航程和飞行高度约20米。
- 使电池远离高温。将它们存放在远离加热设备的地方。
- 当无人机不使用时,断开无人机和控制器的电源。
- 如果超过10天不使用无人机,为了延长无人机电池的使用寿命,请将电池充电至其满容量的40-50%。
- 要从 220V 网络为电池充电,开发人员建议使用 5V (1-2A) 电源。不建议从计算机给电池充电。
- 不建议在遥控器中安装电池。
- 在下次飞行后开始充电之前,您需要让电池冷却。电池只能在成人在场的情况下充电。如果使用不当,电池可能会爆炸!
- 飞行前,请确保飞行器电池安装正确,否则即使短暂断电也可能影响飞行安全。
- 为了控制设备(控制台)的不间断和正确运行,不允许新旧电池混用,或者碱性电池与普通电池或充电电池。
螺旋桨- 为了正确安装螺旋桨,请注意螺旋桨和无人机臂上的标记 (A / B)。它们必须相同。否则,无人机将无法起飞。
电机
- 如果无人机的动力装置碰到障碍物或干扰螺旋桨旋转的东西,过流保护和四轴飞行器电机将运行关掉。
- 有两种方法可以从遥控器和通过 mob 界面启动和停止电机。应用:
远程启动
- 向上移动左油门杆。
- 同时,将左操纵杆移至右下角,将右操纵杆移至左下角并保持该位置1 秒钟。
- 将无人机放在水平表面上,然后按下遥控器上的自动起飞/着陆按钮(参见上面的遥控器按钮分配 )。电机将启动,无人机将自动起飞至约 1.5 米的高度并悬停。
远程停止
- 向下移动左油门杆并保持 2-3 秒。
- 同时,将左摇杆/操纵杆移至右下角,将右摇杆移至左下角并保持该位置1秒钟。
- 飞行器悬停时,按遥控器上的自动起飞/着陆按钮(见上面“分配遥控按钮”(588)部分)将自动着陆并关闭电机。
通过暴徒停止和启动马达。应用程序
RTH
- 请注意,在返航 / RTH 模式下,无人机不会绕过障碍物飞行...
- 如果无人机距离起飞点超过20米,它会自动爬升到20米的高度,然后返回起飞点。
- 如果无人机距离起飞点不到 20 米,它将返回,并保持飞行时的当前高度。
- 如果来自控制面板的信号中断超过 6 秒,控制系统将激活起飞模式。如果在返航过程中遥控器信号恢复,返航过程将继续,但用户可以使用遥控器上的返航按钮取消返航模式(参见“分配遥控器按钮”部分) (601))并恢复控制无人机。
- 如果没有 GPS 信号,飞行器将不会返回起飞位置。如果在无人机和遥控器失去通信的那一刻没有卫星信号,飞行器不会飞到起飞地点,而是软着陆,随后电机被阻塞。
- 当电池电压下降到临界值时,飞行器灯会慢闪,并自动启动返航功能。返航过程中,为了避免与障碍物碰撞,用户可以控制无人机(爬升和下降,左转和右转)。
- 如果由于电池电压低而执行 RTH 模式,则无法取消自动复位。
陀螺仪校准
- 在第一次开始之前执行一次水平位置校准过程。如果在保持位置时无人机停止保持地平线并不断移动(例如没有外部因素的帮助,例如风),则需要重新校准,这通常发生在坠落/坠毁之后无人机。
- 如果飞机机身的倾斜角度超过 10 度,将无法进行水平位置校准。
校准指南针
- 建议在每个新发射场以及飞机无法定位卫星时校准指南针很长一段时间。
- 请勿在强磁场中或大型金属结构附近校准指南针。
- 罗盘校准时水平旋转时,与飞机机身水平位置的偏差角度不应超过30度。
GPS 定位
- 在室内飞行时,卫星定位模式不起作用。
- 当卫星定位未激活时,左上角应用程序中的指示器(以卫星的形式)为红色并闪烁(参见上方的移动应用程序界面,(621))。
- 卫星定位强,无人机前光束LED常亮红色,后光束LED常绿。
- 当飞机尾灯由黄色变为绿色时,表示检测到足够多的卫星并成功记录返航点。之后,无人机使用GPS定位功能即可起飞。
- 在第一次发射时,搜索卫星大约需要一分钟。如果无人机长时间找不到卫星,请重复指南针校准程序。
- 如果飞行器的尾灯在飞行过程中呈绿色闪烁,则表示 GPS 信号较弱。在这种情况下,建议停止飞行并等待检测到足够数量的卫星。
光学定位
- 光学定位未激活时,应用程序左上角(镜头类型)中的指示灯闪烁
]- (参见上方的移动应用程序接口部分, )。
- 定位飞行器光学系统时,无人机前光束上的 LED 灯始终为红色,后光束上的 LED 灯始终为黄色。
- 当飞行器后光束呈黄色闪烁时,表示光学定位系统无法正常工作。
- 光学定位系统不能在弱光、均匀或反射表面、水面和超过 10 米的高度运行。
无头模式
- 启用时,飞行器指示灯每 4 秒闪烁一次。
- 为了正确操作该模式,在打开电源之前,将无人机安装好,将其尾部准确地放在遥控器上。
拍照
- 按“拍照”按钮 - 无人机上的照明将与拍摄照片的闪光灯重复。
- 按下“视频”按钮 - 无人机上的背光灯将闪烁,表示正在录制视频。如果停止录像,飞行器灯会恢复常亮模式,表示录像已停止。
价格
Syma W1 PRO 四轴飞行器由开发商通过大多数知名互联网市场以 143.99 美元的价格出售.
输出
- )
优点
- 便携式设计和尺寸
- 产品质量
- 自锁无刷电机
- 可折叠螺旋桨
- 飞行性能(动态/稳定))
- 定位精度(GPS 光学和气压传感器)
- FHD FPV 摄像机
- FPV 5GHz(250 米中最多 200 米)
- 价格
缺点
- 没有 4K 摄像机
- 没有 EIS
- 智能功能无法正常工作 ]
- FPV 系统与老一代智能手机不兼容(仅具有最新操作系统版本的现代设备)
- 螺旋桨需要平衡
另一个可行的预算选项,专为那些发现在掌握了在 收集器二次曲面照片和视频拍摄
视频
开发者关于无人机主要功能以及如何使用 Syma W1 (PRO) 的视频。
。






