
- 1 مقدمة
- 2 الميزات
- 3 محتويات العبوة
- 4 المواصفات
- 4.1 طائرة بدون طيار
- 4.2 الكاميرا
- 4.3 لوحة التحكم
- 4.4 بطارية بدون طيار
- 4.5 Mob. الملحق
- 5 المظهر
- 6 محركات
- 7 كاميرا
- 7.1 الكاميرا السفلية
- 7.2 التبديل بين الكاميرات
- 7.3 حفظ الصور / مقاطع الفيديو
- 8 FPV
- 9 واجهة تطبيق الهاتف المحمول
- 9.1 محرر MV
- 10 بدون رأس الوضع
- 10.1 وضع التشغيل / الإيقاف
- 11 معدل التدفق
- 11.1 تغيير معدل التدفق
- 12 وضع المبتدئين
- 13 الإقلاع والهبوط التلقائي
- 14 وضعًا تلقائيًا
- 14.1 وضع متابعة الاستخبارات
- 14.2 وضع الدائرة
- 14.3 خطة الطيران
- ) 14.4 رحلة نقطة الطريق
- 14.5 التحكم بإيماءات الطائرة بدون طيار
- 14.6 التحكم بالإيماءات
- 15 دير im RTH
- 16 مصدر الطاقة
- 16.1 عملية الشحن
- 17 التحكم
- 17.1 تخصيص أزرار لوحة المفاتيح
- 18 بدء التشغيل الأولي
- 18.1 الخطوة 1. معايرة الجيروسكوب
- 18.2 الخطوة 2. معايرة البوصلة
- 18.3 الخطوة 3. الاتصال بكاميرا FPV
- 19 توصية والملاحظات
- 20 السعر
- 21 الخلاصة
- 21.1 الإيجابيات
- 21.2 سلبيات
- 22 فيديو
مقدمة
Syma W1 هو الطراز الأعلى في فئة "GPS Smart Drone" من سلسلة "W" من Syma Toys
حاليًا ، ينفذ المطور رسميًا المروحية الرباعية في السوق تحت اسم Syma W1 PRO.
الميزات
- الوزن (مع البطارية) 249 جم
- التصميم المحمول والأبعاد (28.7 × 27 × 5.8 سم)
- تحديد الموقع: مستشعرات GPS بصرية وبارومترية
- محرك بدون فرش مع مراوح قابلة للطي
- كاميرا 5 ميجا بكسل 1080P FPV
- كاميرا سفلية 720P
- الإقلاع / الهبوط التلقائي
- تعليق الموقف
- كحد أقصى. زمن الرحلة 18 دقيقة
- كحد أقصى. مسافة FPV 250 م
- مدى تردد FPV القابل للتحويل: 2.4 جيجا هرتز / 5 جيجا هرتز
- التحكم: الهاتف الذكي ؛ جهاز التحكم عن بعد بالهاتف الذكي
- 4 × أوضاع الطيران والالتقاط التلقائي (اتبعني / الدائرة / خطة الطيران / رحلة نقطة الطريق)
- التحكم بإيماءات اليد (الصورة / الفيديو)
- التحكم في الطائرة بدون طيار مع إيماءات اليد
- العودة التلقائية إلى وضع RTH لنقطة الإقلاع (ستعود المروحية إلى نقطة الإقلاع والهبوط: في حالة فقدان الإشارة بين جهاز التحكم عن بعد والطائرة / في حالة عدم كفاية شحن البطارية / فرضه المستخدم بواسطة الزر الموجود في جهاز التحكم عن بعد)
- الوضع " بدون رأس"
- معدل التدفق المتغير (الطاقة) 50/100٪
- وضع المبتدئين
- تطبيق جوال SYMA AIR (مع دعم لتحرير اللقطات ؛ مُكيف للتفاعل مع الشبكات الاجتماعية)
خيارات
يتم تقديم مروحية Syma W1 (PRO) الرباعية من قبل مطور في التكوين الوحيد:
- طائرة بدون طيار
- بطارية قابلة لإعادة الشحن 2S 7.4V 1800 mAh LiPo
- لوحة التحكم
- كابل شحن USB
- 4 × مراوح احتياطية (2CW / 2CCW)
- حماية براغي
- حامل الهاتف الذكي
- دليل المستخدم (الإنجليزية / الصينية / الروسية

المواصفات
الطائرة بدون طيار

الكاميرا

لوحة التحكم
بطارية طائرة بدون طيار

Mob. التطبيق
المظهر
نموذج عالي التنفيذ. تصل إلى المستهلك في عبوات عالية الجودة. جميع عناصر المجموعة معبأة في صناديق منفصلة. كما يقولون ، تافه ، لكنها لطيفة.





)محركات
كوادروكوبتر Syma W1 (PRO) مجهز بمحركات 1815 2400KV بدون فرش يتم التحكم فيها بواسطة منظمات السرعة التي تدعم وظيفة الكبح التلقائي مع منع الدوران ، وبالتالي ضمان تشغيل أكثر أمانًا. تعمل جنبًا إلى جنب مع مراوح قابلة للطي لمزيد من قابلية النقل. في الممارسة العملية ، في أقصى الإعدادات ، يتجلى الاهتزاز قليلاً بسبب عدم توازن الدعائم. بشكل عام ، محطة طاقة جيدة الضبط ، وإمكانياتها وفيرة حتى عند القيادة في طقس عاصف.

الكاميرا
كاميرا 5 ميجابيكسل FHD FPV مسؤولة عن التصوير وعرض الشخص الأول. يوفر دقة الفيديو: 1920 × 1080 بكسل @ 25 إطارًا في الثانية ؛ الصورة: 5 ميجا بكسل. لا يوجد تثبيت للصورة. من الناحية العملية ، تتوافق جودة التصوير مع المواصفات المذكورة في المواصفات ، ويكون عرض اللون جيدًا.في أوضاع القيادة المتوسطة ، لا يوجد هلام / اهتزازات ، في وضع "الغاز على الأرض" ، يمكنك مراقبة الهلام بشكل دوري. يتم معالجتها عن طريق موازنة المراوح. بفضل نظام الدفع المضبوط جيدًا ، في وضع التحويم ، يمكنك تحقيق جودة صورة جيدة جدًا (لطائرة بدون طيار من مكان مخصص للميزانية).

الغرفة السفلية
يوجد أيضًا على متن الطائرة بدون طيار كاميرا أخرى موجودة في الجزء السفلي منها ، والتي تؤدي لهذا النموذج أداء مزدوج وظيفة. بادئ ذي بدء ، هذا هو شغل الموضع ، على سبيل المثال ، عندما لا يكون تحديد موقع القمر الصناعي متاحًا أو يتم تنفيذ الرحلة في الداخل (يعمل جنبًا إلى جنب مع جهاز استشعار بارومتري ؛ يتم تنشيطه على مسافة تصل إلى 10 أمتار من الأرض) ، ويمكن استخدامه أيضًا ككاميرا FPV. وفقًا لمواصفات المطور ، فهي توفر التصوير بدقة 1280 × 720 بكسل بمعدل 25 إطارًا في الثانية. من الناحية العملية ، الجودة بعيدة عن 720P ، وبالتالي فإن الكاميرا السفلية ستكون ذات صلة فقط بتوضيح موقع الهبوط.

التبديل بين الكاميرات
يمكنك التبديل بين الكاميرات بطريقتين: استخدام الأزرار الموجودة على جهاز التحكم عن بعد (انظر القسم " تعيين أزرار على جهاز التحكم عن بعد " أدناهأدناه
حفظ الصورة / الفيديو
يمكن حفظ الصورة / مادة الفيديو الملتقطة في ذاكرة الهاتف الذكي المقترن وعلى بطاقة microSD (يتم شراؤها بشكل منفصل) ، منفذًا يوجد به

FPV
يمكن تنفيذ رحلة الشخص الأول لـ W1 (PRO) عبر Wi-Fi على واحد من اثنين متاحين للاختيار نطاقات التردد 2.4 جيجا هرتز / 5 جيجا هرتز (يمكن تحديدها في تطبيق الهاتف المحمول

لضمان رحلة مريحة في وضع FPV ، من المهم أن يحتوي الهاتف الذكي (iOS / Android) المقترن بالطائرة بدون طيار على الإصدار الموصى به من نظام التشغيل (انظر قسم "مواصفات تطبيق الهاتف المحمول" أعلاه
من الجدير بالذكر أيضًا أنه لضمان أقل زمن انتقال في بث الفيديو ، يوصى بحفظ المواد المصورة حصريًا في microSD مثبتة في الطائرة بدون طيار مع الأداء الموصى به (انظر (انظر قسم مواصفات الكاميرا أعلاه
يجب أن يكون مفهومًا أن نظام Syma W1 (PRO) FPV مبني على أبسط التقنيات وهو مصمم حصريًا للتعرف الأولي على الطيران في الشخص الأول. لذلك ، سيتم تنفيذ الإزالة بعيدًا عن الأنظار على مسؤوليتك الخاصة ومخاطرك.
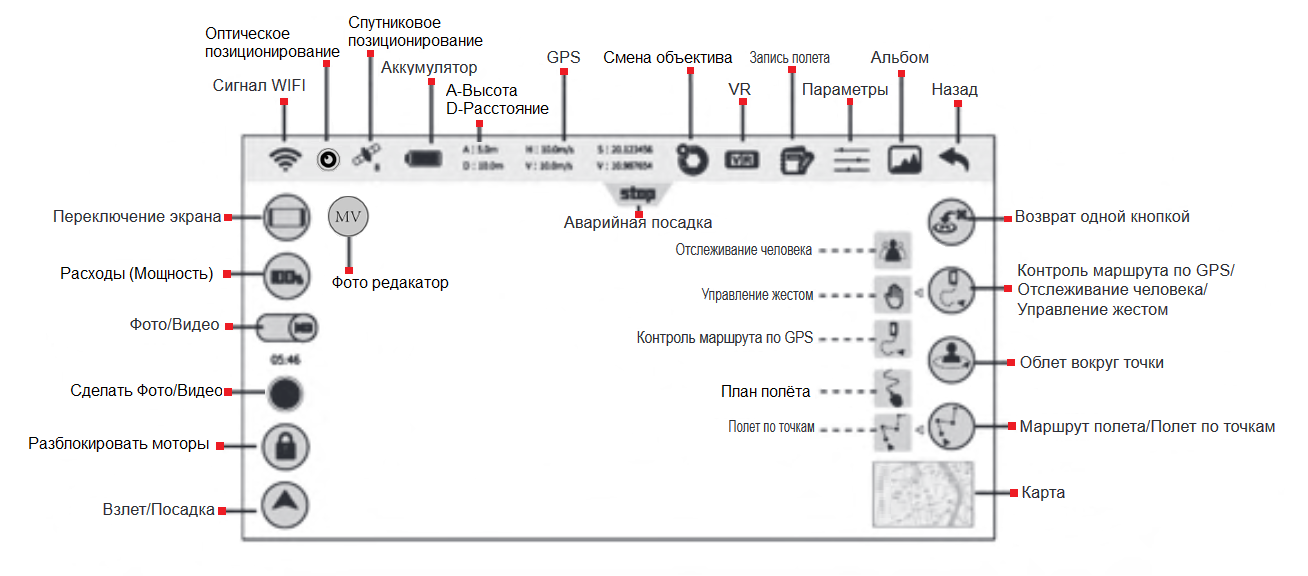
واجهة تطبيقات الهاتف المحمول
واجهة تطبيقات الجوال SYMA AIR في وضع FPV.
محرر MV
محرر صور متاح في تطبيق الهاتف المحمول ، والذي يمكن إدخاله عن طريق النقر على "MV" أيقونة. يسمح للمستخدم بالتحرير السريع لمواد الصور الواردة من الطائرة بدون طيار ومشاركتها عبر وسائل التواصل الاجتماعي المختلفة. الشبكات.
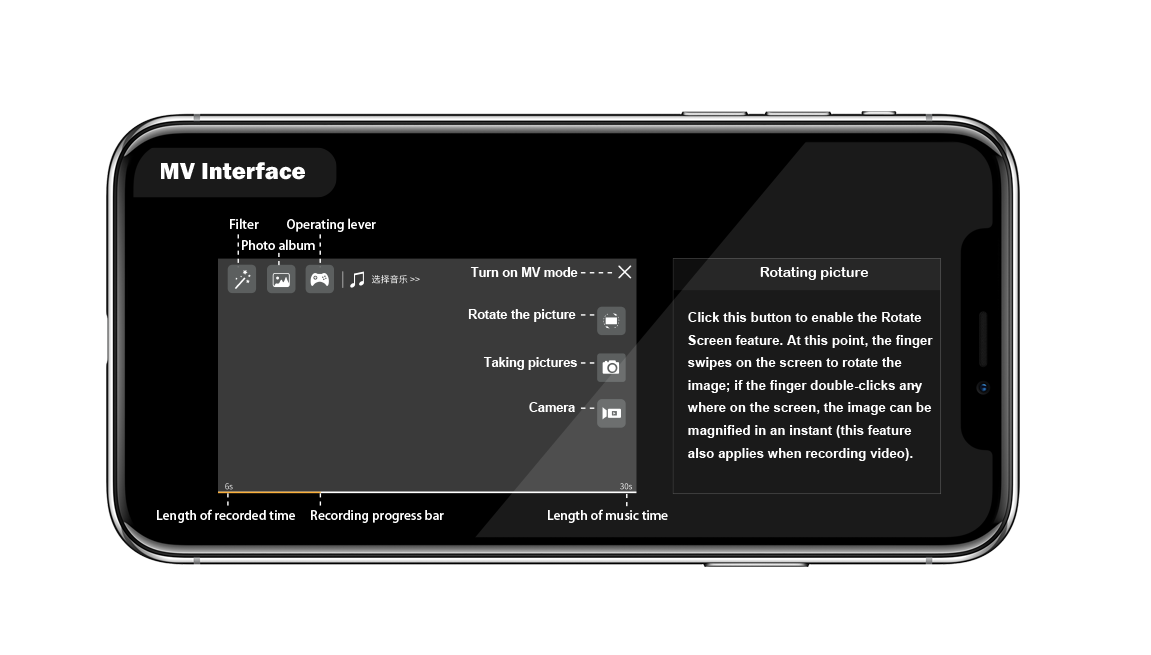
* واجهة محرر الصور في تطبيق SYMA AIR.
وضع مقطوعة الرأس
وضع مقطوعة الرأس - يسمح للمستخدم المبتدئ في المراحل الأولى من التدريب التجريبي بعدم القلق بشأن مكان وجود المروحية الرباعية في المقدمة وأين تكون الى الخلف. ومع ذلك ، يوصى بتقليل وقت التجريب في هذا الوضع ، أو استبعاد استخدامه تمامًا. سيكون لهذا النهج تأثير إيجابي على الجودة الإجمالية للقيادة في المستقبل ، علاوة على ذلك ، هذا الوضع غير متاح في الطرز الأكثر تكلفة / طائرات السباق بدون طيار.

وضع التشغيل / الإيقاف
للتشغيل الصحيح للوضع ، قبل تشغيل الطاقة ، قم بتثبيت الطائرة بدون طيار مع ظهرها جزء صارم إلى معدات التحكم ثم ابدأ تشغيل المحركات وقم بتشغيل الوضع. يتم تنشيط وضع مقطوعة الرأس عن طريق الضغط لفترة طويلة على عصا التحكم اليمنى (حوالي ثانيتين) ويصاحبها سلسلة من 3 إشارات صوتية. عندما يكون الوضع نشطًا ، ستصدر لوحة التحكم أصوات تنبيه قصيرة باستمرار (لا يمكنك إيقاف تشغيل المنبه). يتم إيقاف تشغيل الوضع بنفس طريقة التشغيل ، مع الضغط لفترة طويلة على العصا اليمنى (حوالي ثانيتين) ويرافقه صوت تنبيه طويل.
التكاليف
إذا رغبت في ذلك ، يمكن للمستخدم تغيير قوة (التكاليف / النشاط) للطائرة بدون طيار. هناك خياران متاحان: 50٪ و 100٪. تعد إمكانات الطاقة المحدودة بنسبة 50 ٪ أكثر ملاءمة للمبتدئين أو عندما يكون من الضروري الحصول على أفضل جودة من التصوير ، حيث تصبح الطائرة بدون طيار في هذه الحالة أبطأ وأكثر سلاسة. يؤدي الحد الأقصى للإنفاق بنسبة 100٪ إلى إطلاق إمكانات الطاقة الكاملة ، وتصبح الطائرة بدون طيار أكثر حدة ، وتصبح الاستجابة لحركة العصي أكثر حدة.

تكاليف التبديل
يتم تنفيذ تكاليف التبديل إما في قائمة تطبيقات الهاتف المحمول (انظر قسم "واجهة تطبيق الهاتف المحمول" أعلاه
وضع المبتدئين
وضع المبتدئين - يتم تعيينه افتراضيًا. في هذا الوضع ، معلمات مثل max. الارتفاع والحد الأقصى. مسافة الطائرة بدون طيار محددة بـ 30 مترا. معطل في قائمة تطبيق الجوال "SYMA AIR" في قسم "Parameter" (انظر قسم "Interface mob.المرفقات " أعلاه

الإقلاع والهبوط التلقائي
يمكن تنفيذ وظيفة الإقلاع والهبوط التلقائي باستخدام زر على جهاز التحكم لوحة (انظر قسم "الغرض من أزرار التحكم عن بعد" أدناهأعلاه
الأوضاع التلقائية
وضع متابعة الاستخبارات
يتوفر خياران:
وضع تتبع الشخص أو تعقب الإنسان - يسمح لك بتحديد كائن للتصوير على شاشة الهاتف الذكي ، بعد أن تتبعه الطائرة بدون طيار. عندما يتم تنشيط الوضع ، يتم وضع الطائرة بدون طيار باستخدام مستشعرات ضوئية وبارومترية ، ويصبح تحديد موقع القمر الصناعي غير نشط. الأهمية! يوصى بإجراء الرحلة الأولى في مساحة مفتوحة كبيرة وخالية من الأشخاص وأي أشياء وعقبات أخرى.
![]()
وضع متابعة GPS أو تتبع GPS - في هذا الوضع ، سيتتبع نظام الطائرة بدون طيار وحدة GPS الخاصة بالهاتف الذكي ، لذلك ستتبع الطائرة بدون طيار المقترنة بدون طيار هاتف ذكي. الأهمية! يوصى بإجراء الرحلة الأولى في مساحة مفتوحة كبيرة وخالية من الأشخاص وأي أشياء وعقبات أخرى.
![]()
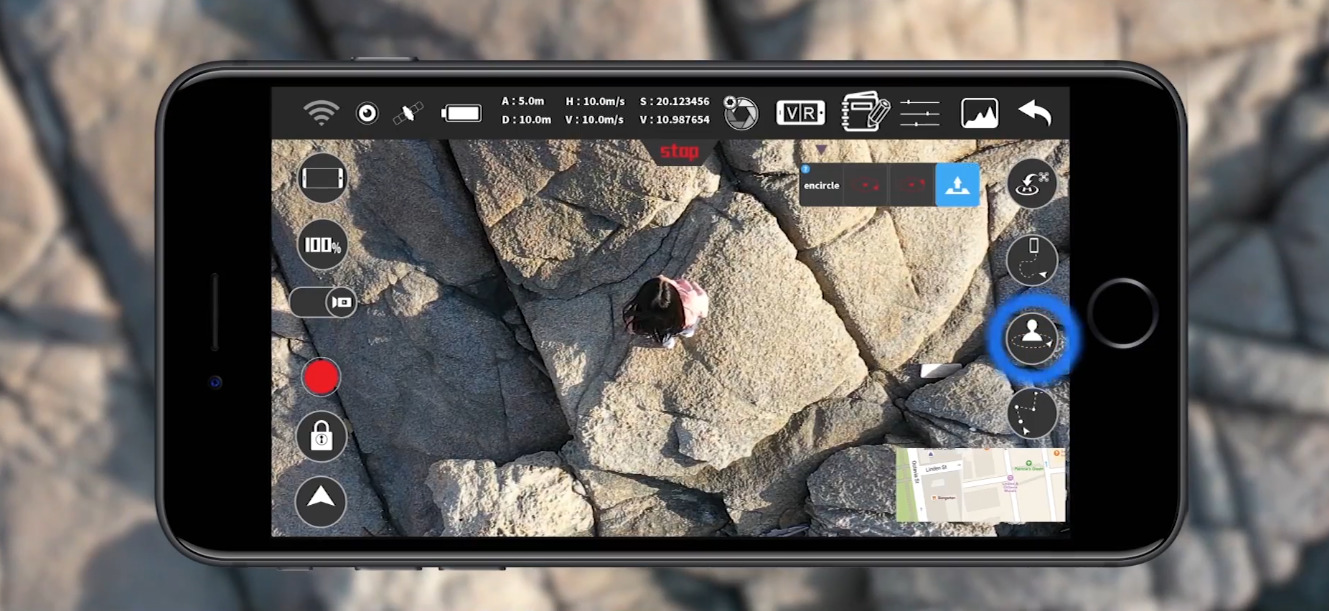
وضع الدائرة
وضع الدائرة أو إحاطة الرحلة - يعمل الوضع عندما يكون القمر الصناعي نشطًا لتحديد المواقع. للتحليق بشكل صحيح حول كائن ما ، قبل تنشيطه ، يجب عليك تشغيل الطائرة بدون طيار ووضعها فوق الكائن المحدد. ثم ، في تطبيق الهاتف المحمول ، انقر على أيقونة "وضع الدائرة / محيط الرحلة (انظر قسم" واجهة تطبيق الهاتف المحمول " أعلاه
خطة الطيران
خطة الرحلة - تحديد المواقع البصرية (تحديد المواقع GPS غير نشط). إطلاق الطائرة بدون طيار في الهواء. في تطبيق الهاتف المحمول ، انقر على أيقونة "خطة الرحلة" (انظر قسم "واجهة تطبيق الهاتف المحمول" أعلاه

رحلة نقطة الطريق
رحلة نقطة الطريق - نظام تحديد المواقع العالمي نشط في تحديد موقع وضع الرحلة بإحداثية. إطلاق الطائرة بدون طيار في الهواء. في تطبيق الهاتف المحمول ، انقر على أيقونة "Waypoint flight" (انظر قسم "واجهة تطبيق الهاتف المحمول" أعلاه

التحكم في إيماءات الطائرة بدون طيار
Palm Control - إطلاق الطائرة بدون طيار والوقوف أمام كاميرا على مسافة 1.5 متر. قم بتنشيط وضع Palm Control في قائمة تطبيقات الهاتف المحمول. مد يدك أمام الكاميرا ، وراحة اليد أولاً ، وضغط الأصابع معًا. بالنظر إلى شاشة الهاتف الذكي المقترن ، انتظر (حوالي 3 ثوانٍ) حتى تتعرف الطائرة بدون طيار على الإيماءة عن طريق تمييز راحة يدها بمستطيل أحمر. كما سيتغير لون الأضواء الموجودة على العوارض الخلفية للطائرة إلى اللون الأحمر. بعد ذلك ، حرك راحة يدك يسارًا ويمينًا ، لأعلى ولأسفل ، وستدور / تتحرك الطائرة بدون طيار في اتجاهها. يعمل وضع التحكم في إيماءات الطائرة بدون طيار في وضع تحديد المواقع البصري ، ونظام تحديد المواقع العالمي (GPS) غير نشط. الأهمية! يوصى بإجراء الرحلة الأولى في مساحة مفتوحة كبيرة وخالية من الأشخاص وأي أشياء وعقبات أخرى.

التحكم في التصوير بالإيماءات
يمكنك التحكم في التصوير كأزرار على جهاز التحكم عن بعد (انظر قسم "تعيين الزر" ، أدناهأعلاه
صورة - لالتقاط صورة بإيماءة اليد ، وتشغيل الطائرة بدون طيار والوقوف أمام كاميرا الطائرة بدون طيار على مسافة 1.5 متر. مد يدك وأظهر الطائرة بدون طيار (في غضون 3 ثوانٍ) ، ما يسمى ب " إيماءة النصر - ✌
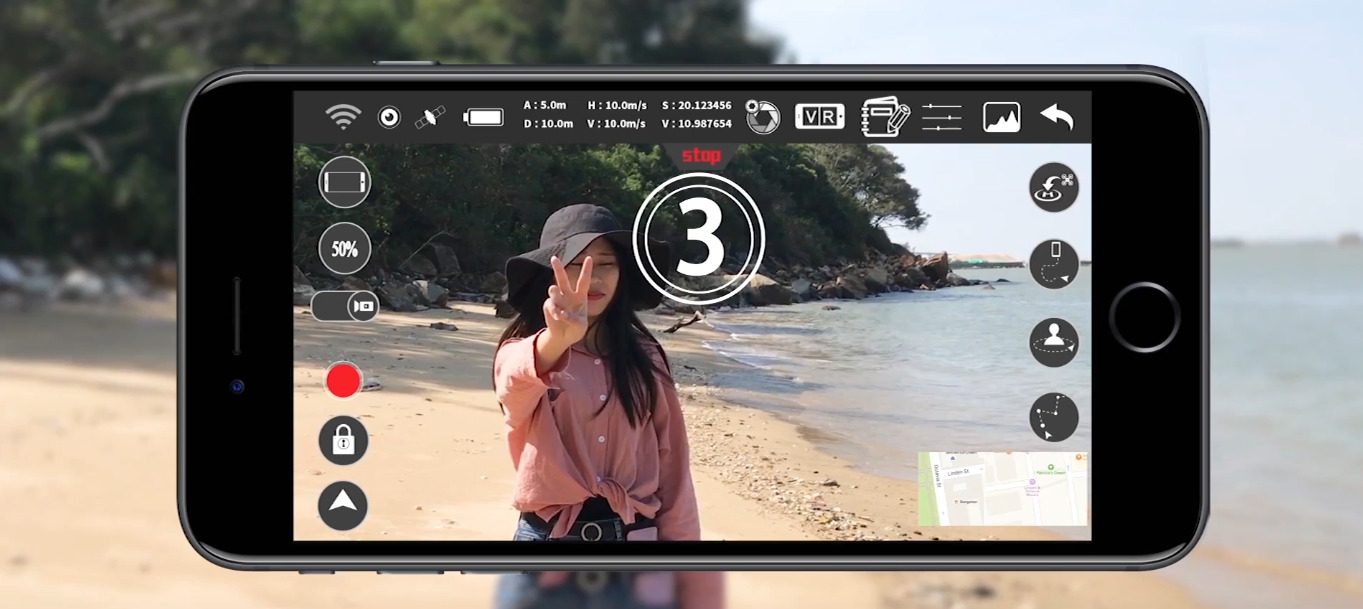
فيديو - لبدء التصوير بإيماءة اليد ، قم بتشغيل الطائرة والوقوف أمام كاميرا الطائرة بدون طيار على مسافة 1.5 متر.مد يدك وأظهر الطائرة بدون طيار (في غضون 3 ثوانٍ) راحة يدك

يجب أن يكون مفهوما أن جودة تشغيل كل من الأوضاع التلقائية / التعرف على الإيماءات تفقد بشكل كبير جودة الأداء للطائرة بدون طيار المتميزة الأنماط ، وبالتالي ، فهي ذات صلة فقط بالتعارف الأول ولا شيء أكثر من ذلك.
وضع RTH
العودة إلى الوضع المنزلي (RTH) - يسمح لك بإعادة الطائرة بدون طيار إلى موقع الإقلاع. هناك ثلاثة خيارات لإعادة المروحية إلى موقع الإقلاع ، اثنان منها آليان (يتم تنشيط وظيفة العودة تلقائيًا في حالة: فقدان الاتصال بين الطائرة بدون طيار وجهاز التحكم عن بعد ؛ عندما تكون بطارية الطائرة بدون طيار منخفضة). من الممكن أيضًا تنشيط الإرجاع يدويًا / قسريًا بالضغط على زر في جهاز التحكم عن بُعد (راجع قسم "تعيينات الأزرار على جهاز التحكم عن بُعد" أدناهأعلاه
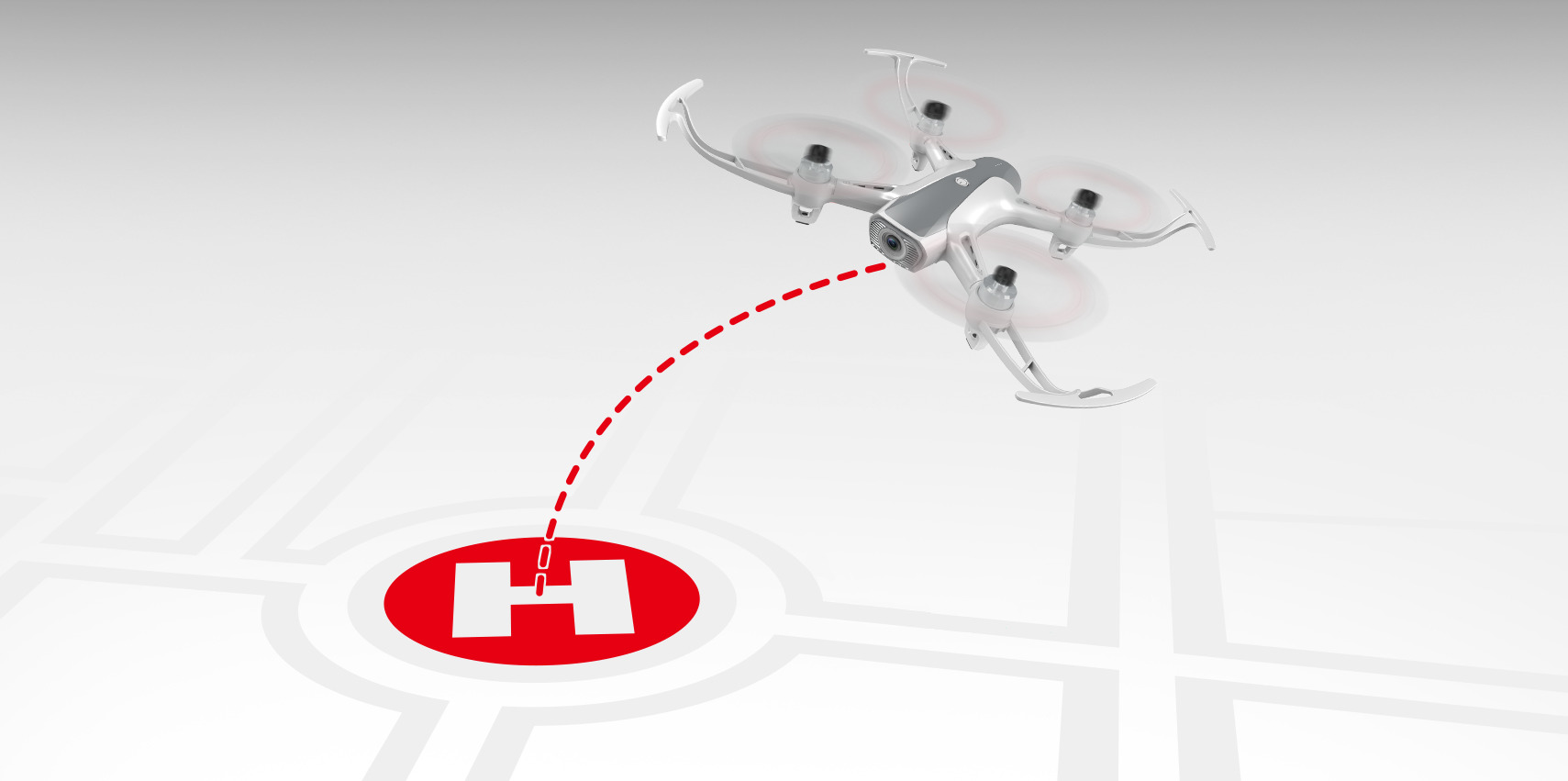
ومع ذلك ، يجب أن يوضع في الاعتبار أنه لتنفيذ وضع الإرجاع ، يجب أن يكون الاتصال عبر الأقمار الصناعية نشطًا ، وإلا فلن يكون الإرجاع ممكن ، وبعد ذلك ستهبط الطائرة بدون طيار تلقائيًا مباشرة في المكان الذي توجد فيه ، مع الإغلاق اللاحق للمحركات.
مزود الطاقة
يتم توفير مصدر الطاقة لـ Syma W1 (PRO) من علبتين (2S ؛ 7.4 فولت) ليثيوم بوليمر (LiPo) بطارية قابلة للشحن 1800 مللي أمبير. البطارية مصنوعة في صندوق غير قابل للفصل ولا تتطلب توصيل أسلاك كهربائية للتوصيل ، يكفي فقط إدخالها حتى تنقر المزالج في حجرة بطارية الطائرة بدون طيار. يوفر هذا النهج حماية إضافية لمصدر الطاقة ، كما أنه يجعل من الممكن استبداله بسرعة (بدون أسلاك: "plug-in-out"). كل شيء من أجل البساطة! وفقًا لمواصفات المطور ، توفر البطارية مدة طيران بحد أقصى 18 دقيقة. من الناحية العملية ، كانت هذه المرة من 10 إلى 12 دقيقة ، اعتمادًا على الوضع التجريبي والعوامل البيئية الخارجية مثل الرياح.

جاري الشحن
يتم شحن البطارية باستخدام شاحن USB المصاحب. مدة الشحن حوالي 3.5 ساعة. أثناء عملية الشحن ، سيومض المؤشر "الأخضر" ببطء وسيظل المؤشر "الأحمر" قيد التشغيل باستمرار. تتم الإشارة إلى نهاية الشحن من خلال التوهج المستمر لكلا المؤشرين. إذا كانت البطارية غير متصلة أو لم يتم الشحن ، فسيظل المؤشر "الأحمر" قيد التشغيل باستمرار ، ويتم إيقاف تشغيل "الأخضر".عند حدوث خطأ ، يضيء المؤشر "الأحمر" باستمرار ، ويومض المؤشر "الأخضر" بسرعة. يوصي المطور بعدم شحن البطارية من منافذ USB للكمبيوتر ، إلخ. للشحن ، يوصى باستخدام مزود الطاقة
دعونا نعزو الإيجابيات إلى حقيقة أن هناك مؤشرًا على مستوى شحن البطارية وزر لتشغيل الطائرة وإيقافها. ومع ذلك ، فمن الممارسات الجيدة إزالة البطارية بعد الرحلة الأخيرة وتخزينها بشكل منفصل عن الطائرة.
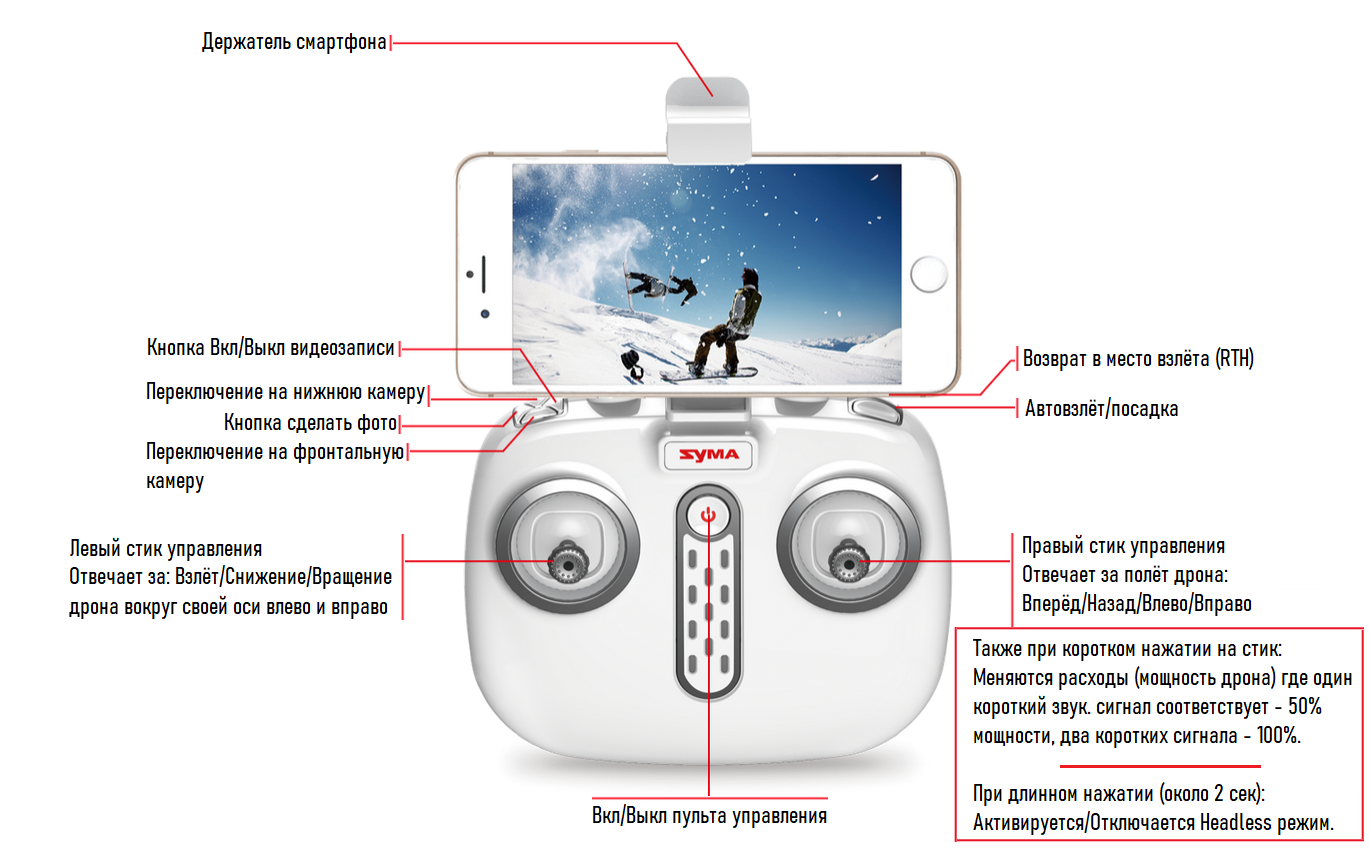
التحكم

* الهاتف الذكي غير مدرج.
يمكن تنفيذ التحكم في الطائرة بدون طيار
تعيين أزرار لوحة المفاتيح
البداية الأولى
بعد الإزالة من الصندوق ، شحن البطارية وحماية المروحة ، سيرتبط التنشيط الأول دائمًا بالمعايرة الإلزامية للجيروسكوب والبوصلة للطائرة بدون طيار. يمكنك بدء عمليات المعايرة بطريقتين مناسبتين لك: من لوحة التحكم ، أو من خلال الإرشادات المرئية خطوة بخطوة في تطبيق SYMA AIR للهاتف المحمول (استخدم رمز الاستجابة السريعة للتنزيل السريع).
في رأينا ، فإن أبسط وأسرع طريقة لبدء عمليات المعايرة هي جهاز التحكم عن بعد. يمكن العثور على إجراء المعايرة من خلال التطبيق ، بالإضافة إلى الوظائف الأخرى للطائرة بدون طيار Syma W1 (PRO) في هذا الفيديو من المطور.
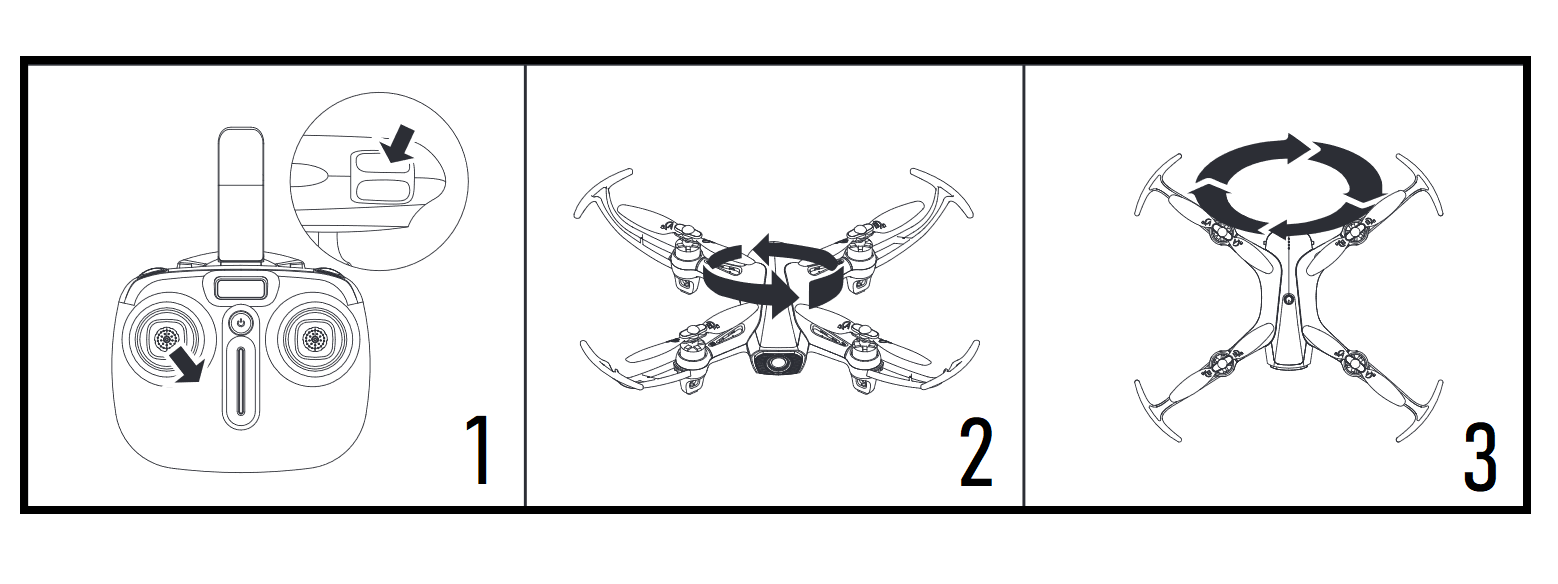
الخطوة الأولى. معايرة الجيروسكوب
الخطوة الأولى هي معايرة الجيروسكوب (أو كما هو مكتوب في "معايرة يدوية للوضع الأفقي للطائرة بدون طيار"):
- ضع الطائرة على سطح مستو (مهم).
- قم بتشغيل لوحة التحكم.
- قم بتشغيل الطائرة بدون طيار (انقر نقرًا مزدوجًا ، حيث تكون الأولى قصيرة والثانية طويلة (حوالي 3 ثوانٍ)). سيشير تشغيل الطائرة بدون طيار إلى مسار صوتي. ستومض الإضاءة الخلفية على الطائرة بدون طيار بسرعة.
- حرك عصا التحكم اليسرى على جهاز التحكم عن بعد لأعلى ولأسفل بحركة واحدة (سيربط هذا الإجراء جهاز التحكم عن بعد بالطائرة بدون طيار). ستتغير الإضاءة الخلفية على الطائرة بدون طيار إلى وهج ثابت.
- حرك كل من عصي التحكم بحركة واحدة إلى الركن الأيمن السفلي وثبتهما هناك. ستومض الإضاءة الخلفية للطائرة بشكل متكرر في البداية ، ثم تنتقل إلى وضع الإضاءة الثابت ، مما يشير إلى نهاية عملية معايرة الجيروسكوب.
- يمكنك الذهاب إلى معايرة البوصلة.

الخطوة الثانية. معايرة البوصلة
البوصلة. للقيام بذلك ، قم بما يلي:
- لبدء عملية المعايرة ، في جهاز التحكم عن بعد ، حرك عصا التحكم اليسرى إلى الزاوية اليمنى السفلية واضغط على زر الرجوع (انظر القسم "تعيين جهاز التحكم عن بُعد أزرار التحكم " أعلاه
- ستومض الإضاءة الخلفية للطائرة ببطء للإشارة إلى بدء وضع المعايرة.
- إبقاء الطائرة في وضع أفقي ، ابدأ بتدويرها حول محورها (الاتجاه ليس مهمًا) حتى تبدأ إضاءة الطائرة بدون طيار في الوميض بسرعة (عادة حوالي 2-3 دورات).
- الآن حرك الطائرة بدون طيار إلى وضع عمودي مع الكاميرا لأسفل وابدأ في تدويرها حول محورها أيضًا حتى تتحول إضاءة الطائرة إلى وضع الإضاءة الثابت.
- تمت معايرة البوصلة الآن ، يمكنك المتابعة لإقران هاتفك الذكي بكاميرا الطائرة بدون طيار.
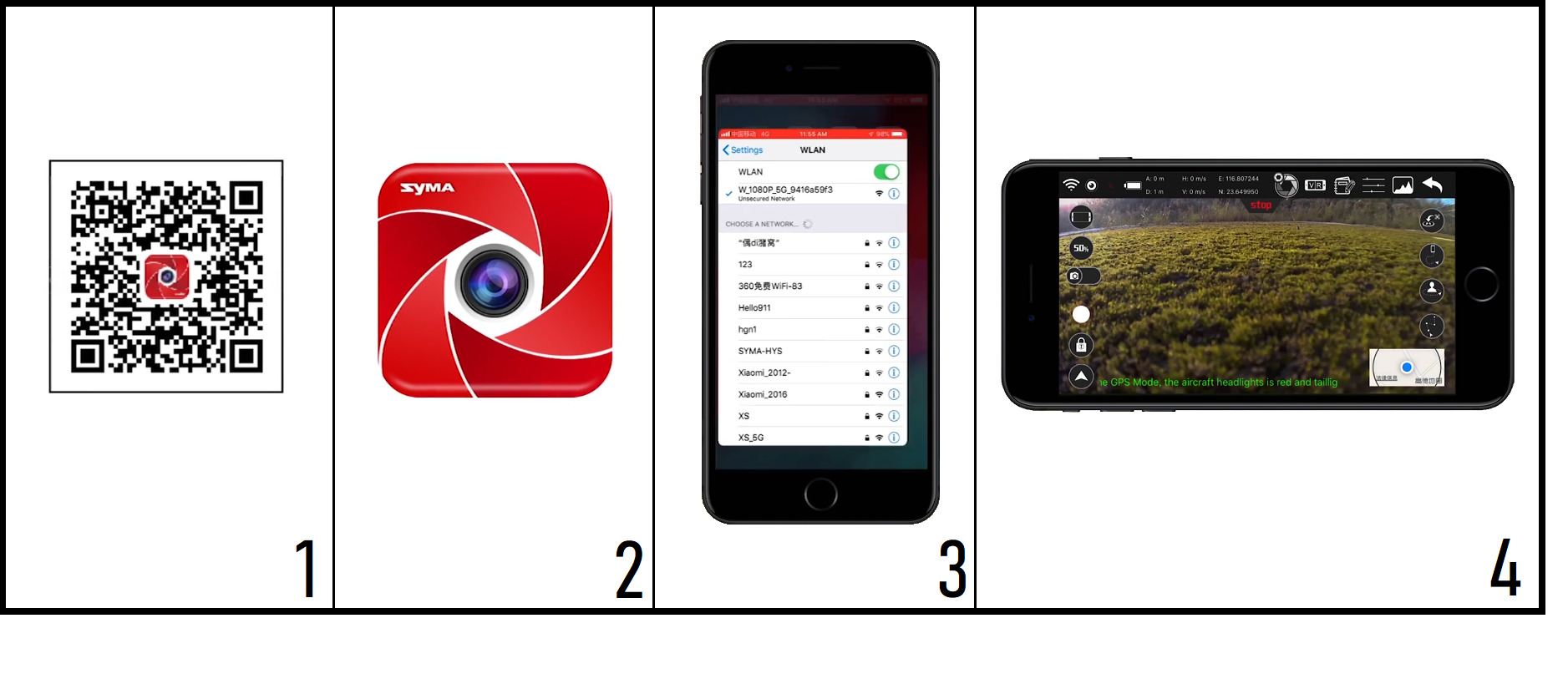
الخطوة 3. الاتصال بكاميرا FPV
قم بما يلي:
- قم بتنشيط Wi-Fi على هاتفك الذكي.
- انتقل إلى إعدادات Wi-Fi الخاصة بالهاتف الذكي وحدد من قائمة الشبكات المتاحة: W_1080P_XG_XXXXXXXXX (حيث XG هو نطاق التردد المتاح 2.4G أو 5G ؛ XXXXXXXXX هو رمز اتصال فردي ، وهو مختلف عن كل هاتف ذكي) ؛ لا توجد كلمة مرور مطلوبة.
- بعد الاتصال بنقطة اتصال WiFi الخاصة بكاميرا FPV ، قم بتشغيل التطبيق. اضغط على الأيقونة الموجودة في الزاوية اليمنى السفلى " جهز
- سيتم الإشارة إلى الاتصال بكاميرا الطائرة بدون طيار من خلال بث الفيديو المباشر المعروض على شاشة الهاتف الذكي.
- انتهت عملية الاقتران.
- يمكنك البدء في الإقلاع (كيفية بدء / إيقاف المحركات والتعرف على نظام التحكم ، انظر التوصيات أدناه).
توصيات وملاحظات
عام
- سابقًا استخدم المنتج ، تأكد من قراءة التعليمات.
- يوصى بتشغيل وحدة التحكم أولاً ثم تشغيل الطائرة بدون طيار.
- بعد الانتهاء من الرحلة ، يوصى بإيقاف تشغيل جهاز التحكم عن بعد أولاً ، ثم إيقاف تشغيل الطائرة بدون طيار.
- إذا كان جسم الطائرة مائلاً أكثر من 70 درجة ، فسيتم إغلاق الطائرة.
FPV
- نظام FPV للطائرة بدون طيار حساس للغاية لأنظمة تشغيل الهواتف الذكية المقترنة بالطائرة بدون طيار (انظر مواصفات "تطبيق الهاتف المحمول" أعلاه) وبالتالي ، إذا لم يتم تضمين نظام تشغيل الهاتف الذكي في قائمة الأنظمة الموصى بها ، فسيكون السفر في وضع الشخص الأول إما غير مريح أو حتى مستحيل.
- نطاق تردد Wi-Fi الموصى به لرحلة FPV هو 5 جيجاهرتز. تم التغيير في قائمة تطبيقات الهاتف المتحرك
- لضمان أقل زمن انتقال في بث دفق الفيديو ، يوصى بحفظ المواد المصورة حصريًا في microSD المثبتة في الطائرة بدون طيار مع الأداء الموصى به (انظر قسم المواصفات أعلاه).
الطاقة
- في ظل ظروف البطارية العادية ، تبلغ أقصى مسافة إزالة حوالي 200 متر وأقصى ارتفاع حوالي 70 مترًا.
- مع عدم كفاية طاقة البطارية ، يبلغ الحد الأقصى للمدى وارتفاع الطيران حوالي 20 مترًا.
- احتفظ بالبطاريات بعيدًا عن درجات الحرارة المرتفعة. قم بتخزينها بعيدًا عن أجهزة التدفئة.
- عندما لا تكون الطائرة بدون طيار قيد الاستخدام ، قم بإزالة الطاقة من الطائرة وجهاز التحكم.
- إذا لم يتم استخدام الطائرة بدون طيار لأكثر من 10 أيام ، من أجل إطالة عمر بطارية الطائرة ، اشحن البطارية إلى 40-50٪ من طاقتها الكاملة.
- لشحن البطارية من شبكة 220 فولت ، يوصي المطور باستخدام مصدر طاقة 5 فولت (1-2 أمبير). لا ينصح بشحن البطارية من جهاز كمبيوتر.
- لا يوصى بتركيب البطاريات في جهاز التحكم عن بعد.
- قبل بدء الشحن بعد الرحلة التالية ، من الضروري أن تكون البطارية قد بردت. يجب شحن البطارية فقط في وجود شخص بالغ. قد تنفجر البطارية إذا تم استخدامها بشكل غير صحيح!
- قبل الطيران ، تأكد من تركيب بطارية الطائرة بشكل صحيح ، وإلا فقد يؤثر انقطاع التيار الكهربائي على سلامة الطيران.
- للتشغيل الصحيح والمتواصل لمعدات التحكم (وحدة التحكم) ، لا يُسمح بخلط البطاريات القديمة والجديدة ، أو القلوية مع البطاريات العادية أو القابلة لإعادة الشحن. مراوح
- لتركيب المروحة بشكل صحيح ، انتبه إلى العلامات (A / B) على كل من المراوح وأذرع الطائرات بدون طيار. يجب أن يكونوا نفس الشيء. خلاف ذلك ، لن تتمكن الطائرة بدون طيار من الإقلاع.
المحركات
- إذا اصطدم محرك الطائرة بدون طيار بعائق أو كان هناك شيء يتداخل مع دوران المراوح ، فإن حماية التيار الزائد والمحركات الرباعية ستعمل يطفىء.
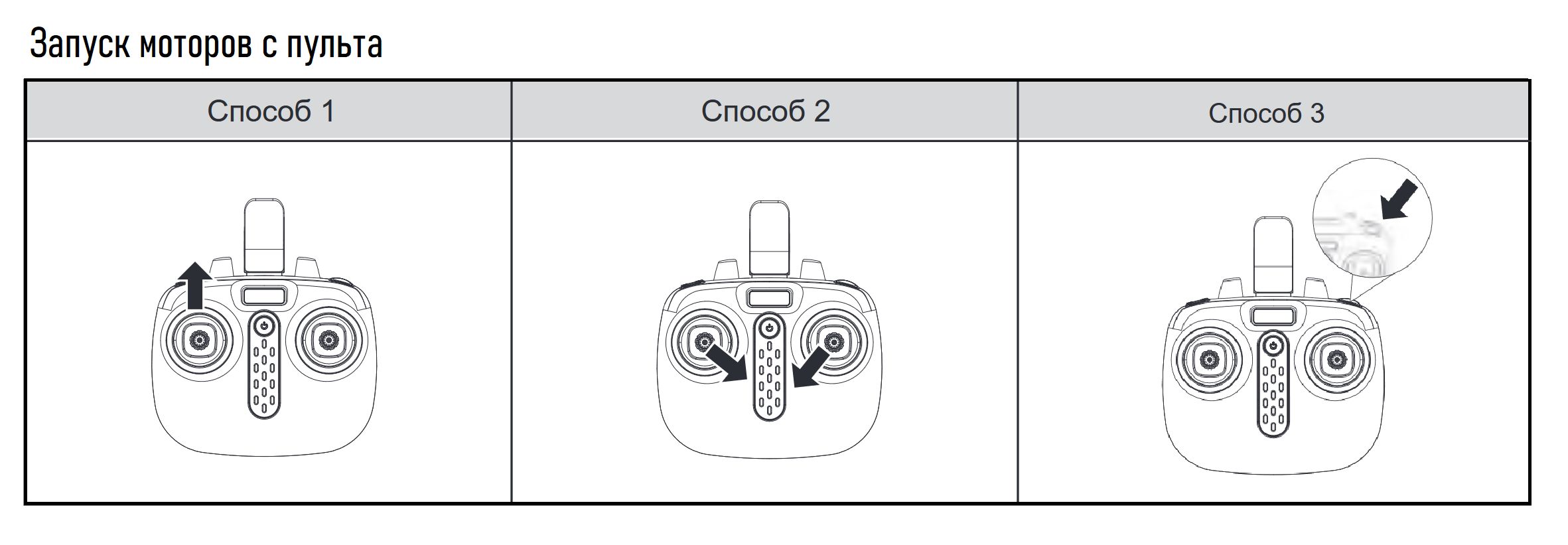
- هناك طريقتان لبدء وإيقاف المحركات من جهاز التحكم عن بعد وعبر واجهة mob. التطبيق:
بدء التشغيل عن بُعد
- حرك عصا الخانق اليسرى لأعلى.
- في نفس الوقت ، حرك عصا التحكم اليسرى إلى الزاوية اليمنى السفلية والعصا اليمنى إلى الزاوية اليسرى السفلية واحتفظ بهذا الوضع لمدة ثانية واحدة.
- ضع الطائرة بدون طيار على سطح مستو واضغط على زر الإقلاع / الهبوط التلقائي على جهاز التحكم عن بعد (انظر تعيين أزرار التحكم عن بعد أعلاه ستبدأ المحركات وستقلع الطائرة بدون طيار تلقائيًا على ارتفاع حوالي 1.5 متر وتحوم.
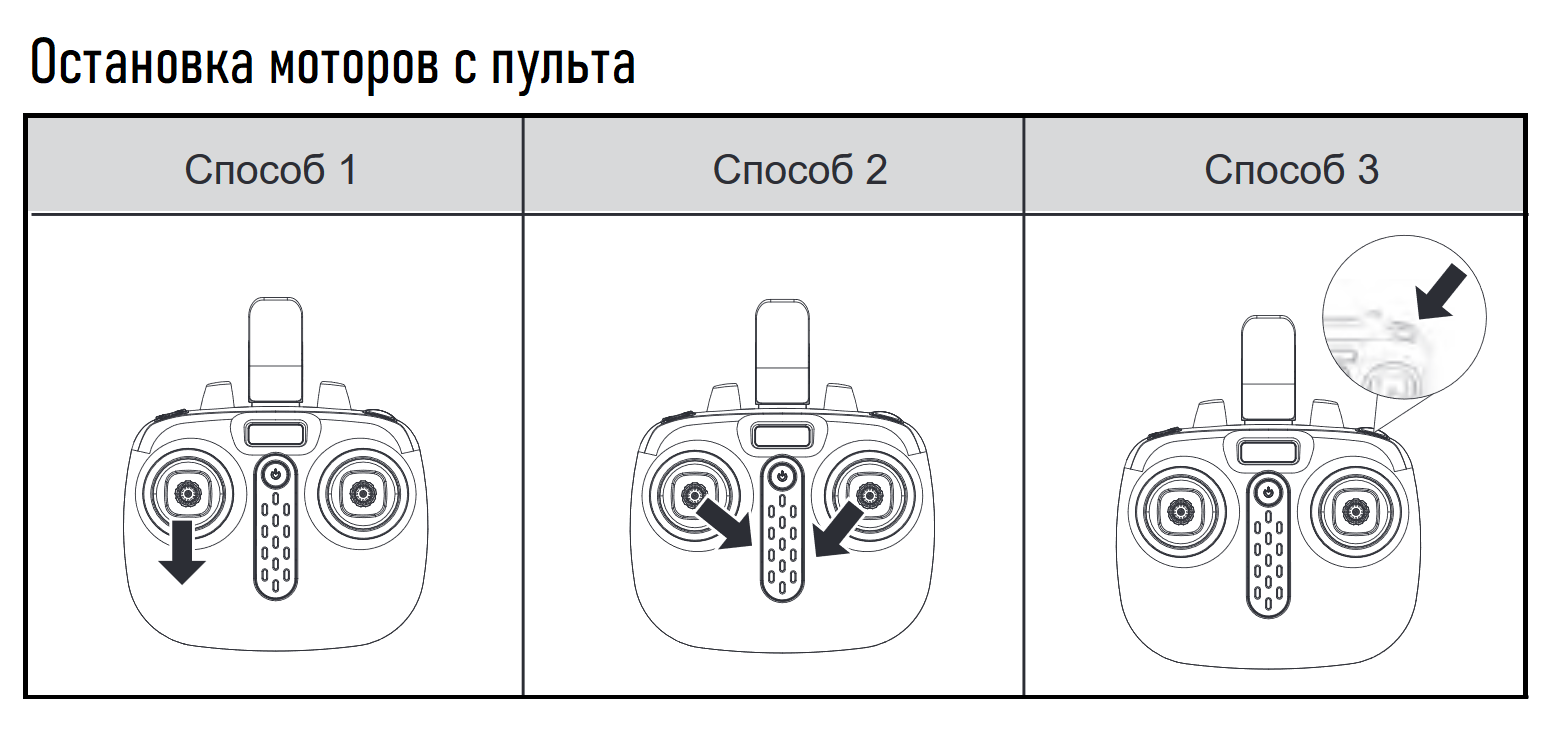
التوقف عن بعد
- حرك عصا الخانق اليسرى لأسفل مع الاستمرار لمدة 2-3 ثوانٍ.
- في نفس الوقت ، حرك العصا اليسرى / عصا التحكم إلى الركن الأيمن السفلي والعصا اليمنى إلى الزاوية اليسرى السفلية واحتفظ بهذا الوضع لمدة ثانية واحدة.
- عندما تحوم الطائرة ، فإن الضغط على زر الإقلاع / الهبوط التلقائي في جهاز التحكم عن بعد (انظر قسم "تعيين الأزرار البعيدة" أعلاه
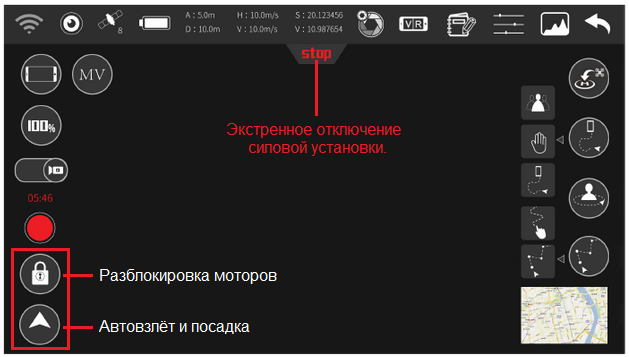
إيقاف وبدء المحركات عبر الغوغاء. التطبيقات
RTH
- يرجى ملاحظة أنه أثناء تنفيذ وضع العودة إلى الصفحة الرئيسية / RTH ، لا تطير حول العقبات...
- إذا كانت الطائرة بدون طيار على بعد أكثر من 20 مترًا من نقطة الإقلاع ، فسوف تصعد تلقائيًا إلى ارتفاع 20 مترًا ثم تعود إلى نقطة الإقلاع.
- إذا كانت الطائرة بدون طيار على بعد أقل من 20 مترًا من نقطة الإقلاع ، فإنها ستعود ، مع الحفاظ على الارتفاع الحالي وقت الرحلة.
- إذا انقطعت الإشارة من لوحة التحكم لأكثر من 6 ثوانٍ ، فسيقوم نظام التحكم بتنشيط وضع الإقلاع. إذا تمت استعادة الإشارة من جهاز التحكم عن بُعد أثناء رحلة العودة ، فستستمر عملية العودة ، ولكن سيتمكن المستخدم من إلغاء وضع العودة باستخدام زر الرجوع في جهاز التحكم عن بُعد (راجع قسم "تعيين أزرار جهاز التحكم عن بُعد" أعلاه
- لن تعود الطائرة إلى موقع الإقلاع إذا لم تكن هناك إشارة GPS. إذا لم تكن هناك إشارة قمر صناعي في لحظة فقدان الاتصال بين الطائرة بدون طيار وجهاز التحكم عن بعد ، فلن تطير المروحية إلى موقع الإقلاع ، ولكنها ستهبط بسهولة مع الإغلاق اللاحق للمحركات.
- عندما ينخفض جهد البطارية إلى قيمة حرجة ، تومض أضواء الطائرة ببطء ويتم تنشيط وظيفة العودة تلقائيًا. أثناء رحلة العودة ، من أجل تجنب الاصطدامات مع العوائق ، يمكن للمستخدم التحكم في الطائرة بدون طيار (الصعود والنزول ، الانعطاف يسارًا ويمينًا).
- إذا تم تنفيذ الوضع RTH بسبب انخفاض جهد البطارية ، فلا يمكن إلغاء إعادة الضبط التلقائي.
معايرة الجيروسكوب
- يتم تنفيذ عملية معايرة الوضع الأفقي مرة واحدة قبل البدء الأول. إعادة المعايرة مطلوبة إذا توقفت الطائرة بدون طيار عن الاحتفاظ بالأفق في وقت الاحتفاظ بالمنصب وتتحرك باستمرار (دون مساعدة العوامل الخارجية ، مثل الرياح ، على سبيل المثال) ، يحدث هذا عادةً بعد سقوط / تحطم الطائرة بدون طيار.
- لن تكون معايرة الوضع الأفقي ممكنة إذا تجاوزت زاوية إمالة جسم الطائرة 10 درجات.
معايرة البوصلة
- يوصى بمعايرة البوصلة في كل موقع إطلاق جديد ، وعندما تكون الطائرة بدون طيار غير قادرة على تحديد موقع الأقمار الصناعية من أجل وقت طويل.
- لا تقم بمعايرة البوصلة في المجالات المغناطيسية القوية أو بالقرب من الهياكل المعدنية الكبيرة.
- عند الدوران أفقيًا في وقت معايرة البوصلة ، يجب ألا تتجاوز زاوية الانحراف عن الوضع الأفقي لجسم الطائرة 30 درجة.
تحديد المواقع GPS
- عند الطيران في الداخل ، لا يعمل وضع تحديد موقع القمر الصناعي.
- عندما يكون تحديد موقع القمر الصناعي غير نشط ، يكون المؤشر (على شكل قمر صناعي) في التطبيق في الزاوية اليسرى العليا باللون الأحمر ويومض (انظر واجهة تطبيق الهاتف المحمول ، أعلاه
- مع تموضع قوي للقمر الصناعي ، تكون إضاءة LED على الحزم الأمامية للطائرة حمراء دائمًا ، وفي الحزم الخلفية دائمًا ما تكون خضراء.
- عندما تتغير إضاءة الحزمة الخلفية للطائرة من الأصفر إلى الأخضر ، فهذا يشير إلى أنه تم اكتشاف عدد كافٍ من الأقمار الصناعية وتم تسجيل نقطة العودة بنجاح. بعد ذلك ، تستخدم الطائرة بدون طيار وظيفة تحديد المواقع GPS ويمكنها الإقلاع.
- في وقت الإطلاق الأول ، يستغرق البحث عن الأقمار الصناعية حوالي دقيقة واحدة. إذا لم تتمكن الطائرة بدون طيار من العثور على أقمار صناعية لفترة طويلة ، يرجى تكرار إجراء معايرة البوصلة.
- إذا يومض الضوء الخلفي للطائرة باللون الأخضر أثناء الطيران ، فهذا يشير إلى ضعف إشارة GPS. في هذه الحالة ، يوصى بإيقاف الرحلة والانتظار حتى يتم اكتشاف عدد كافٍ من الأقمار الصناعية.
تحديد الموضع البصري
- عندما يكون الوضع البصري غير نشط ، يومض المؤشر في التطبيق في الزاوية اليسرى العليا (نوع العدسة) [629)]
- (انظر قسم واجهة تطبيق الهاتف المحمول ، أعلاه
- عند وضع النظام البصري للطائرة ، تكون مصابيح LED على الحزم الأمامية للطائرة حمراء دائمًا وعلى العوارض الخلفية صفراء دائمًا.
- عندما تومض الحزمة الخلفية للطائرة باللون الأصفر ، فهذا يشير إلى أن نظام تحديد المواقع البصري لا يمكن أن يعمل بشكل طبيعي.
- لا يمكن لنظام تحديد المواقع البصري العمل في الإضاءة المنخفضة ، فوق سطح موحد أو عاكس ، فوق الماء ، وعلى ارتفاع يزيد عن 10 أمتار.
وضع مقطوعة الرأس
- عندما تكون نشطة ، يومض ضوء الطائرة مرة كل 4 ثوان.
- للتشغيل الصحيح للوضع ، قبل تشغيل الطاقة ، قم بتثبيت الطائرة بدون طيار مع ذيلها بالضبط على جهاز التحكم عن بعد.
التقاط الصور
- الضغط على زر "صورة" - تتكرر الإضاءة على الطائرة بدون طيار مع الفلاش الذي تم التقاط الصورة فيه.
- بالضغط على زر "فيديو" - ستومض الإضاءة الخلفية على الطائرة بدون طيار ، مشيرة إلى أنه يتم تسجيل الفيديو. إذا قمت بإيقاف تسجيل الفيديو ، فسيعود ضوء الطائرة إلى وضع الإضاءة الثابت ، مما يشير إلى أنه تم إيقاف تسجيل الفيديو.
السعر
يباع المطور Syma W1 PRO quadcopter من قبل المطور من خلال معظم أسواق الإنترنت المعروفة بسعر 143.99 دولارًا.

الإخراج

- )
محترفون
- محمول التصميم والأبعاد
- جودة المنتج
- محركات ذاتية الغلق بدون فرش
- مراوح قابلة للطي
- أداء الطيران (ديناميكي / مستقر)) دقة تحديد المواقع (مستشعرات GPS الضوئية والبارومترية)
- كاميرا FHD FPV
- FPV بسرعة 5 جيجاهرتز (حتى 200 متر من أصل 250 معلنًا)
- السعر
سلبيات
- لا توجد كاميرا بدقة 4K
- لا EIS
- الوظائف الذكية لا تعمل بشكل صحيح
- نظام FPV غير متوافق مع الجيل الأقدم من الهواتف الذكية (الأجهزة الحديثة فقط مع أحدث إصدارات نظام التشغيل)
- تتطلب المراوح التوازن
خيار ميزانية آخر عملي مصمم لأولئك المستخدمين الذين يجدون أثناء البحث عن نموذج أكثر تقدمًا لطائرة بدون طيار على محركات بدون فرش ، بعد أن أتقن المهارات الأساسية للقيادة على جامع رباعيتصوير الصور والفيديو
فيديو
فيديو من المطور حول الوظائف الرئيسية للطائرة بدون طيار وكيفية استخدام Syma W1 (PRO).
.






