Inhoud
- DIY-drone: les 1. Terminologie.
- Doe-het-zelf-drone: les 2. Frames.
- Doe-het-zelf-drone: les 3. Energiecentrale.
- Doe-het-zelf-drone: les 4. Vluchtcontroller.
- Doe-het-zelf-drone: les 5. Montage.
- Doe-het-zelf-drone: les 6. Prestatiecontrole.
- Doe-het-zelf-drone: les 7. FPV en afstand.
- Drone met je eigen handen: les 8. Vliegtuigen.
Inleiding
Dus, voordat je begint met het monteren van je drone, is de eerste stap het kiezen van een frame. Je kunt het zelf uitvoeren, of kant-en-klare oplossingen gebruiken (UAV frame kit). Zoals je misschien hebt gemerkt, kunnen verschillende soorten frames en configuraties worden gebruikt om UAV's met meerdere rotors te maken. Daarom zullen we in deze sectie algemene of basistypen frames, uitvoeringsmaterialen en ontwerpkwesties beschouwen.
Soorten UAV-frames
Tricopter
- Beschrijving: UAV, die drie stralen heeft, die elk zijn verbonden met een motor. Het voorste deel van de tricopter wordt beschouwd als de zijde van de kruising van twee balken (Y3). De hoek tussen de balken kan variëren, maar is typisch 120°. Om het gyroscopische effect van het oneven aantal rotoren tegen te gaan en om de stuurhoek te veranderen, moet de achterste motor kunnen draaien (dit wordt bereikt door een conventionele RC-servomotor te installeren). Om het gebruik van een servo uit te sluiten van de montage, gebruikt u het Y4-ontwerp
- Voordelen: Ongewone verschijning van de drone. Het bereikt de beste vliegeigenschappen bij het voorwaarts vliegen. Prijs (vereist minder motoren en ESC's om te bouwen).
- Nadelen: Asymmetrisch ontwerp. Vereist het gebruik van een servo. Moeilijkheid bij het uitvoeren van de achterbalk (aangezien de servo langs de as moet worden gemonteerd). Niet alle vluchtcontrollers ondersteunen deze configuratie.

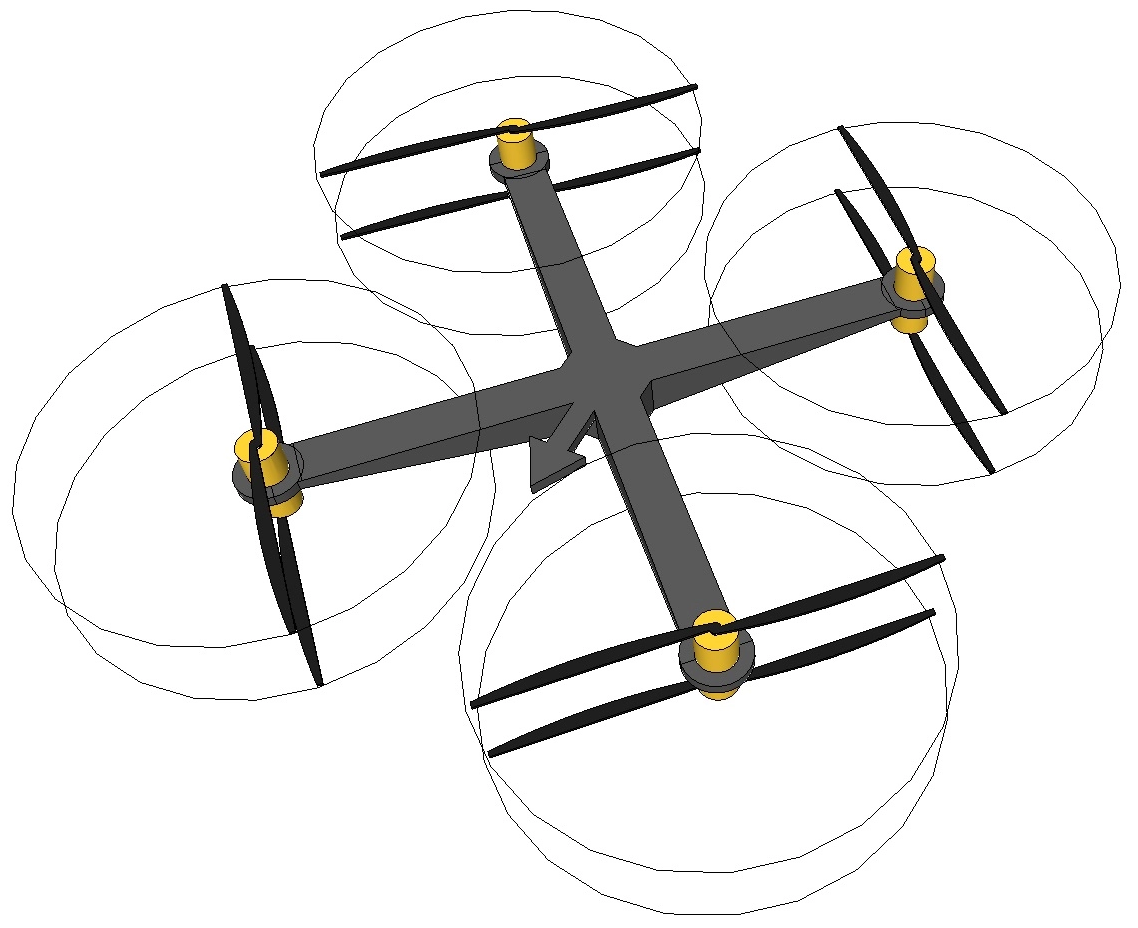
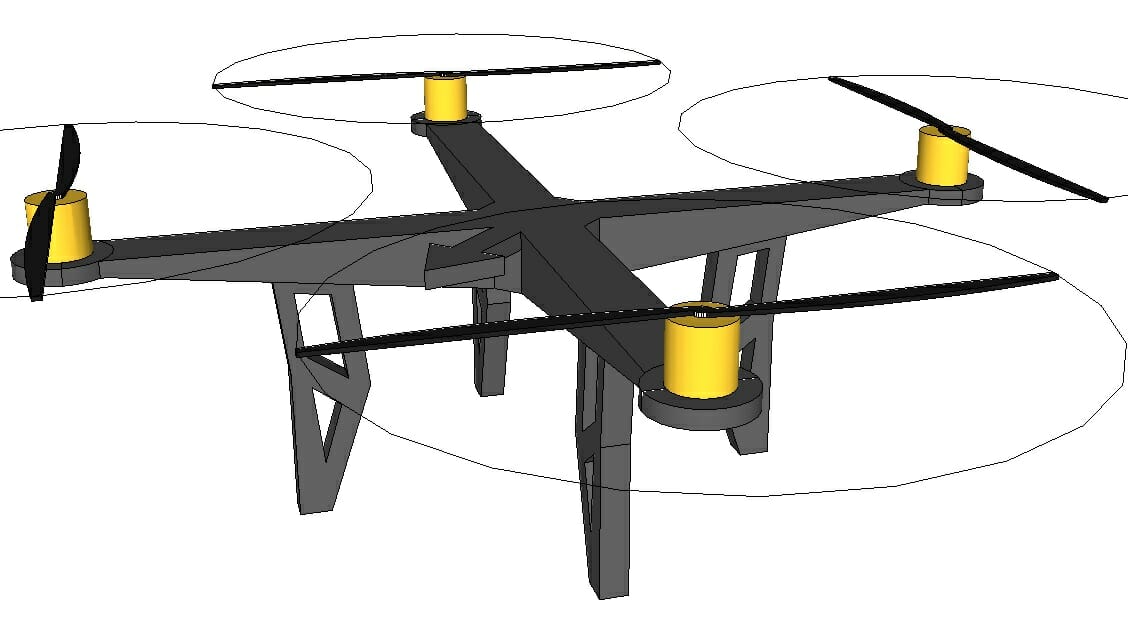
Quadcopter
- Beschrijving:"Quadcopter"-drone met vier stralen, die elk op een motor zijn aangesloten. Voor " X-configuratieconfiguratie
- Voordelen: Meest voorkomende ontwerp met meerdere rotoren. Het eenvoudigste en meest veelzijdige ontwerp. In de standaardconfiguratie zijn de armen/motoren symmetrisch rond twee assen. Alle op de markt verkrijgbare vluchtcontrollers kunnen met deze multi-rotorassemblage werken.
- Nadelen: Gebrek aan redundantie (als het systeem faalt, vooral in de elementen van de energiecentrale, valt de drone).

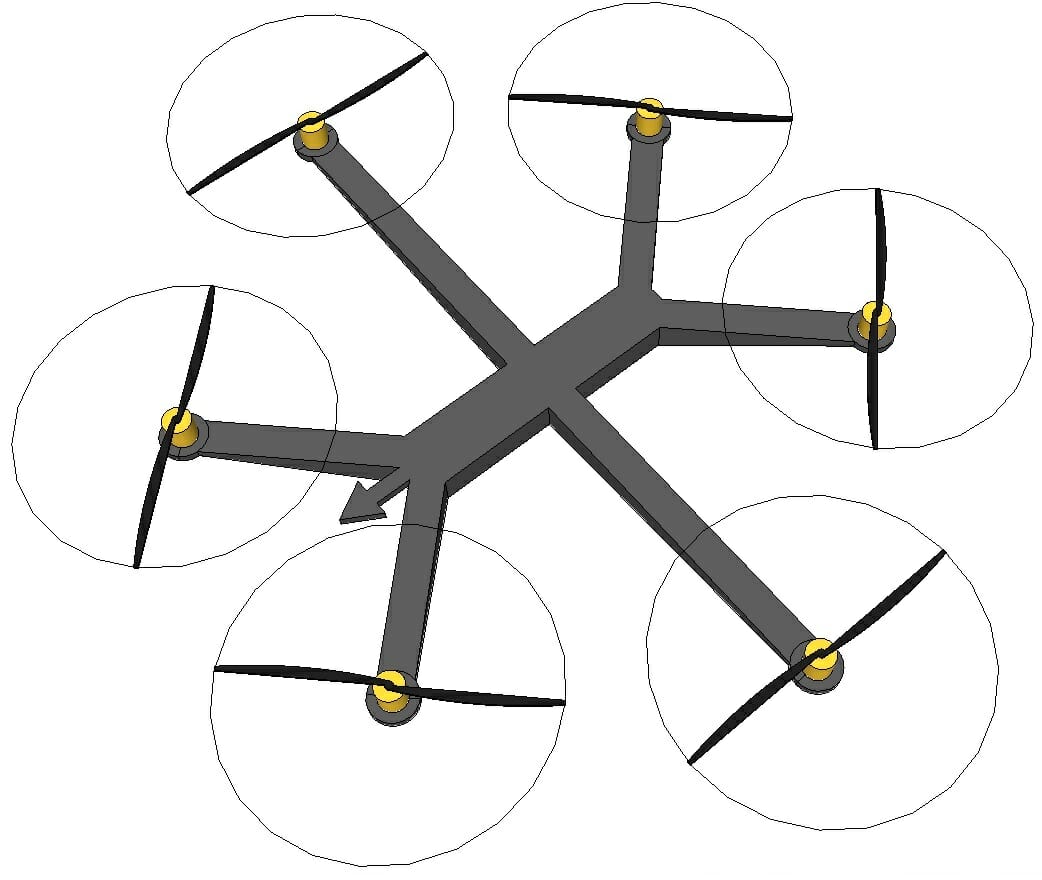
Hexacopter
- Beschrijving: De Hexacopter heeft zes balken, elk van die op de motor is aangesloten. Het voorste deel van de hexacopter wordt beschouwd als de zijde van de kruising van de twee balken, maar de langsbalk kan ook worden beschouwd als het voorste deel.
- Voordelen: Door het hexacopterontwerp kunnen indien nodig eenvoudig twee extra balken en motoren worden toegevoegd, waardoor de totale stuwkracht toeneemt, waardoor de drone meer nuttige lading kan tillen. Bij uitval van een van de motoren is het mogelijk dat de drone een zachte landing kan maken en niet neerstort. Modulair frameontwerp. Bijna alle vluchtcontrollers ondersteunen deze configuratie.
- Nadelen: Omvangrijke en dure constructie. Extra motoren en onderdelen verhogen het gewicht van de helikopter, dus om dezelfde vliegduur als een quadrocopter te krijgen, is het noodzakelijk om meer ruime batterijen te installeren.
Y6
- Beschrijving: Constructie Y6 is een type hexacopter met aan de basis, niet zes balken, maar drie, die elk zijn verbonden met een paar coaxiaal gemonteerde motoren (in totaal 6 motoren). Opgemerkt moet worden dat de onderste propellers neerwaartse stuwkracht uitstralen.
- Voordelen: Minder componenten in vergelijking met hexacopter. Heft meer laadvermogen op in vergelijking met quadcopter. Bij gebruik van tegengesteld draaiende schroeven is het gyroscopische effect uitgesloten, zoals in Y3
- Nadelen: Duurder in vergelijking met een quadrocopter door het gebruik van extra onderdelen die even duur zijn als de hexacopteronderdelen. Extra motoren en onderdelen verhogen het gewicht van de helikopter, wat betekent dat u een grotere batterij moet gebruiken om dezelfde vliegtijd als de quadcopter te krijgen. Zoals de praktijk laat zien, is de stuwkracht die op de Y6 wordt verkregen iets lager dan die van een conventionele hexacopter, waarschijnlijk omdat de onderste rotor de stuwkracht van de bovenste rotor beïnvloedt. Niet alle vluchtcontrollers ondersteunen deze configuratie.

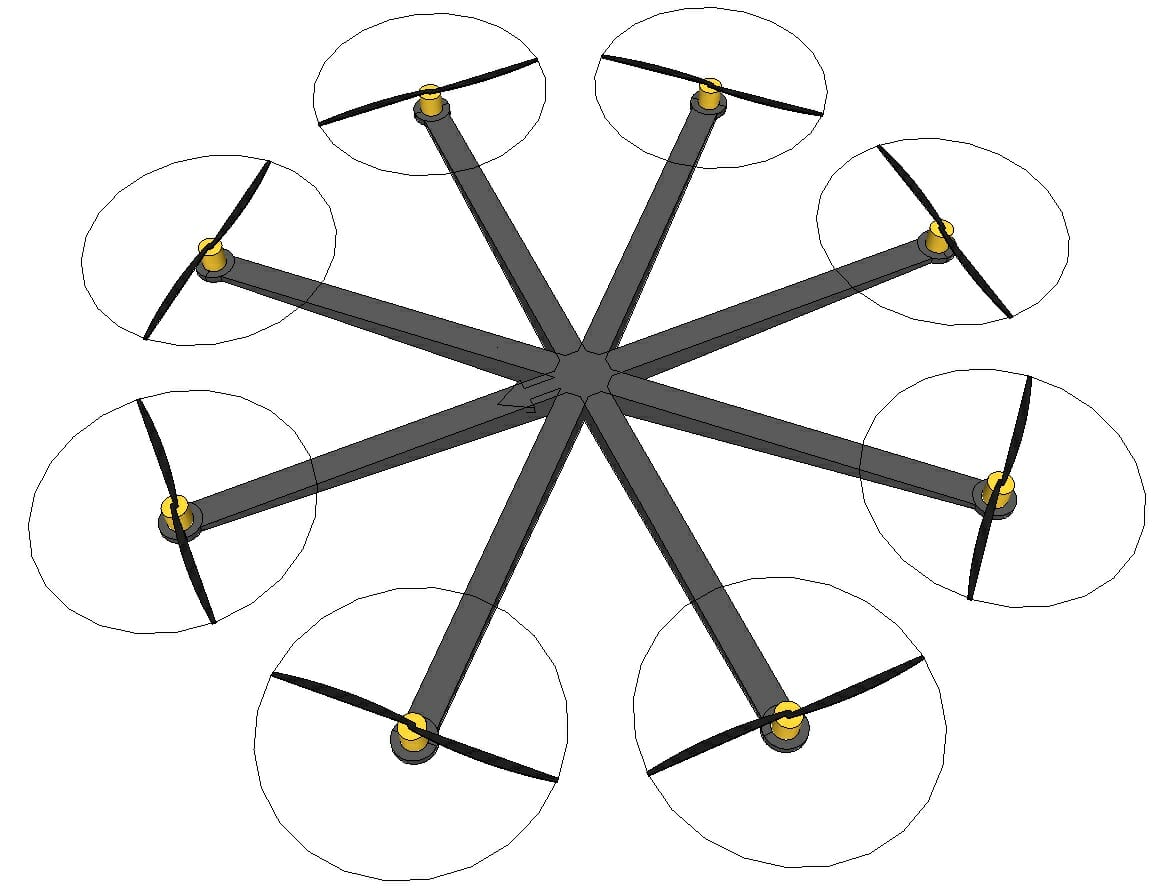
Octocopter
- Beschrijving: Octocopter heeft acht stralen, die elk aangesloten op de motor. Het voorste deel van de hexacopter wordt beschouwd als de zijde van de kruising van twee balken.
- Voordelen: Meer motoren = meer stuwkracht, en dus meer redundantie, waardoor de drone vol vertrouwen kan navigeren met zware en dure DSLR-camera's.
- Nadelen: Meer motoren = hogere prijs en grotere batterij. Vanwege de hoge kosten is het alleen relevant voor de professionele sfeer.
X8
- Beschrijving: Het X8-ontwerp is nog steeds een octocopter, alleen niet met acht, maar met vier balken, die elk zijn verbonden met een paar coaxiaal gemonteerde motoren (in totaal 8 motoren).
- Voordelen: Meer motoren = meer stuwkracht, en dus meer redundantie. Meer kans om de drone voorzichtig te laten landen in het geval van een motorstoring.
- Nadelen: Meer motoren = hogere prijs en grotere accu. Vanwege de hoge kosten is het alleen relevant voor het professionele werkveld.
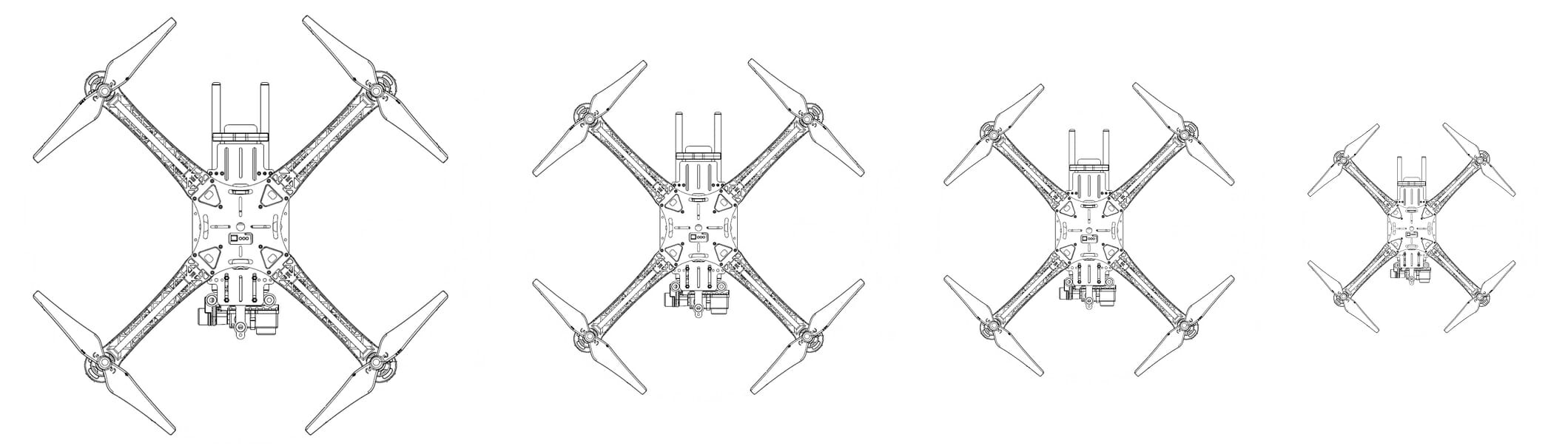
UAV-maat
UAV's zijn er in verschillende maten, van de Nano, die kleiner is dan de handpalm van uw hand naar de grotere, die alleen achter in een vrachtwagen kan worden vervoerd. Voor de meeste gebruikers die net zijn begonnen met de dronehobby, ligt het optimale maatbereik met de grootste veelzijdigheid en waarde tussen 350 mm en 700 mm. De framemaat is de diameter van de grootste cirkel die elk van de motoren doorkruist. Onderdelen voor UAV's van dit formaat hebben een breed scala aan prijzen en de grootste selectie van beschikbare producten.
Materialen van UAV / Constructie
Hieronder staan de meest voorkomende uitvoeringsmaterialen die worden gebruikt voor de vervaardiging van frames voor respectievelijk drones met meerdere rotors, de lijst is niet compleet. Idealiter zou het frame stijf moeten zijn met zo min mogelijk overdracht van trillingen.
Schuimrubber (Foam) - als het enige materiaal voor de vervaardiging van UAV-frames wordt zelden gebruikt, en in de regel in combinatie met een stijf frame of versterkte structuur. Kan ook voor strategische doeleinden worden gebruikt; als bescherming van rotoren (propellers), chassis, werkt vaak als demper. Schuimrubber kan van verschillende soorten zijn, van zacht tot relatief hard.

Hout - als de prioriteit de goedkoopheid van de structuur is, dan is hout een uitstekende optie die de tijd van assemblage en fabricage van reserveonderdelen. Hout is hard genoeg en is een beproefd materiaal. Het is belangrijk dat bij de vervaardiging van het frame perfect recht hout wordt gebruikt (zonder buigen en vervormen).

Kunststof - voor de meeste gebruikers alleen verkrijgbaar in de vorm van plastic platen. Heeft de neiging om te buigen en is als zodanig niet ideaal. Geweldig voor het maken van rolkooien of chassis. Als u 3D-printen overweegt, moet u rekening houden met het productietijdsinterval (het kan gemakkelijker zijn om een UAV-framekit te kopen). 3D-printen van onderdelen heeft goed gewerkt voor kleine quadcopters.

Aluminium - komt naar de consument in verschillende soorten en maten. U kunt plaataluminium gebruiken voor de body, of geëxtrudeerd aluminium voor de drone-balken. Aluminium is niet zo licht als koolstofvezel of G10, maar prijs en duurzaamheid zijn de belangrijkste voordelen van het materiaal. In plaats van te breken of te barsten, heeft aluminium de neiging om te buigen. Om met het materiaal te werken, zijn alleen een zaag en een boor nodig.
G10 (een soort glasvezel) - ondanks het feit dat het uiterlijk en de basiseigenschappen bijna identiek zijn aan koolstof (koolstofvezel) is een minder duur materiaal. Het is voornamelijk beschikbaar in plaatformaat en wordt gebruikt om de bovenste en onderste frameplaten te realiseren. Ook in tegenstelling tot koolstofvezel blokkeert de G10 geen RF-golven.
PCB (printplaat - diëlektrische plaat) - in feite een analoog van glasvezel, maar in tegenstelling tot de laatste zijn altijd vlak. Soms gebruikt als boven- en onderframeplaten om het aantal gebruikte onderdelen te verminderen (er wordt bijvoorbeeld vaak een stroomverdeelkast in het onderpaneel ingebouwd). Frames nanoprintplaat
Koolstofvezel is het meest gewilde materiaal vanwege het lichte gewicht en de hoge sterkte. Het productieproces is nog steeds uitsluitend handmatig. In de regel worden eenvoudige vormen in massa geproduceerd, zoals vlakke platen, buisvormige onderdelen; de uitvoering van complexe driedimensionale vormen wordt op bestelling uitgevoerd.
Aanvullende overwegingen
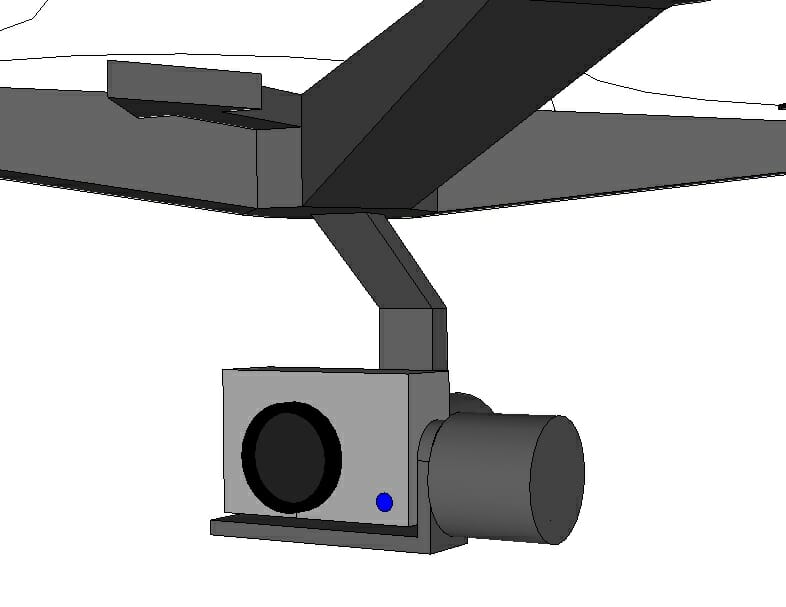
- Gimbal - meestal gebruikt om de camera te stabiliseren (FPV / Luchtfotografie). In de regel wordt het onder het frame geïnstalleerd in overeenstemming met het zwaartepunt van de UAV. Kan direct aan het frame worden bevestigd of door middel van rails. Voor beeldstabilisatie wordt aanbevolen om twee of drie assen gimbals te gebruiken. Vereist een toename van de lengte van de landingspoten.
- Laadvermogen (transport) - in de amateursfeer is iets van een luxe, dus hoe elk extra gewicht vermindert niet alleen de vliegtijd, maar leidt ook tot de afwijzing van het gebruik van extra elementen die belangrijke functies aan de drone zouden kunnen toevoegen. Bij het ontwerpen moet worden begrepen dat de transportkoffer zo licht mogelijk en tegelijkertijd sterk moet zijn, en dat de lading zelf stevig moet worden vastgemaakt, waarbij elke beweging tijdens de vlucht wordt uitgesloten.

- Landingsvoeten - ondanks het feit dat sommige UAV's direct op het frame landen (meestal uitgesloten om het gewicht te verminderen), zal het gebruik van landingssteunen in het ontwerp zorgen voor een opening tussen het onderste deel van de UAV en een oneffen oppervlak, en ook in het geval van een harde landing krijgen ze een klap, waardoor de kans op sparen toeneemt zulke belangrijke elementen van de drone als de camera, ophanging, batterij en frame.
- Installatie - ondanks het feit dat het ontwerp en de fabricage van een drone veel eenvoudiger is dan een conventionele helikopter, moet de locatie van elk element aan het begin van het ontwerpproces worden overwogen.
Algemene installatierichtlijnen:
- Bij het maken van een geheel nieuw frame is het belangrijk om de exacte positie van de vier montagegaten te waarborgen waardoor de motoren zijn bevestigd aan het frame...
- De meeste motoren voor frames van 400 mm tot 600 mm hebben hetzelfde montagegatenpatroon, waardoor een frame van de ene fabrikant kan worden gebruikt en motoren van een andere.
- De locatie van alle aanvullende componenten zou idealiter symmetrisch rond één as moeten zijn, wat later zal helpen om het zoeken en aanpassen van het zwaartepunt van de drone te vergemakkelijken.
- Idealiter zou de vluchtcontroller zich in het midden van de cirkel (en als zodanig in het massamiddelpunt) moeten bevinden die alle motoren verbindt.
- De vluchtcontroller wordt meestal aan het frame bevestigd met behulp van stutten, rubberen dempers of dubbelzijdig plakband.
- Veel fabrikanten gebruiken hetzelfde montagegatenpatroon voor de vluchtcontroller (bijv. 35 mm of 45 mm vierkant), maar er is geen huidige "industriestandaard".
- De batterij is zwaar genoeg, en als het zwaartepunt van uw assemblage een beetje is verplaatst, kunt u dit aanpassen door de batterij iets te verplaatsen.
- Zorg ervoor dat de batterijhouder een beetje speelt, maar zorg er tegelijkertijd voor dat de batterij stevig op zijn plaats wordt gehouden.
- Klittenband wordt vaak gebruikt om accu's vast te zetten, maar het is een goed idee om dubbelzijdige tape tussen de accu en het frame aan te brengen.

Richtlijnen
Stap 1: Kijk welke materialen en gereedschappen voor hun verwerking tot uw beschikking staan.
- Als je arsenaal niet voldoende is om een aangepast frame te implementeren, of als je gewoon een professioneel frame wilt, overweeg dan om een UAV-framekit aan te schaffen.
- Zelfs als het frame is gemaakt met de juiste gereedschappen en basismaterialen, kan het nog steeds structurele zwakheden hebben die overmatige trillingen of verplaatsing veroorzaken. Het productieproces vereist een scherp gezichtsvermogen en ervaring.
- Denk bij het zelf maken van het frame na over de bevestiging van alle noodzakelijke elementen van de drone; motoren, elektronica, enz.
Stap 2: Maak een lijst van eventuele aanvullende (accessoire) onderdelen die u in de assembly wilt opnemen.
- Het kan een gimbal met één, twee of drie assen zijn voor een camera, een parachute, een minicomputer aan boord, een lading, langeafstandselektronica (in de regel maakt het de montage zwaarder en groter), drijvend materieel etc.
- De resulterende lijst van aanvullende / hulponderdelen zal een idee geven van de afmetingen van de drone en de totale massa berekenen.
Stap 3: Denk na over de geschatte framemaat.
- Een groot frame is niet per se een groot potentieel voor een drone, en een kleiner frame maakt de montage misschien niet goedkoper.
- Een drone gebouwd op een frame van 400 - 600 mm wordt aanbevolen voor beginners.
.Stap 4: Ontwerp, bouw en test het frame.
- Als je de UAV-framekit hebt gekocht, hoef je je geen zorgen te maken over sterkte, stijfheid en bouw.
- Als u besluitom een frame helemaal opnieuw te ontwerpen en te bouwen
- Overweeg om gespecialiseerde modelleringssoftware te gebruiken (veel zijn gratis, zoals Google Sketchup) om het frame te ontwerpen en ervoor te zorgen dat de afmetingen correct zijn.
Nu heb je het frame en kun je doorgaan naar de volgende les.







