
Inleiding
Nog niet zo lang geleden CheersonCX-10
Eigenschappen
- Borstelloze motoren
- Open source-controller
- GPS-module
- Bereik tot 1km
- Gimbal aangepast voor GoPro-camera's
- Intelligent Orientation System (IOC)
- Autopilot
- Vluchtmodi
- Auto Return in plaats van takeoff en daaropvolgende landing (in geval van communicatieverlies / batterij bijna leeg)
- LED-achtergrondverlichting

Opties
- Quadcopter Cheerson CX-20 Auto Pathfinder
- Batterij 3S 11.1V 2700mAh 20-40C LiPo 30Wh (met XT60-connector)
- Hardware-besturingseenheid CX20 (aangedreven door vier "AA" 1.5V, apart verkrijgbaar)
- Gimbal voor de camera (rubberen dempers van de gimbal fungeren als stabilisatie / aangepast voor GoPro-camera's)
- Batterijlader
- Voedingseenheid voor oplader
- 4 × hoofdschroeven
- 2 × montagevoeten
- Bevestigingsmiddelen
- Gereedschap
- Instructie-cd (digitale instructie)

Specificatie
Uiterlijk





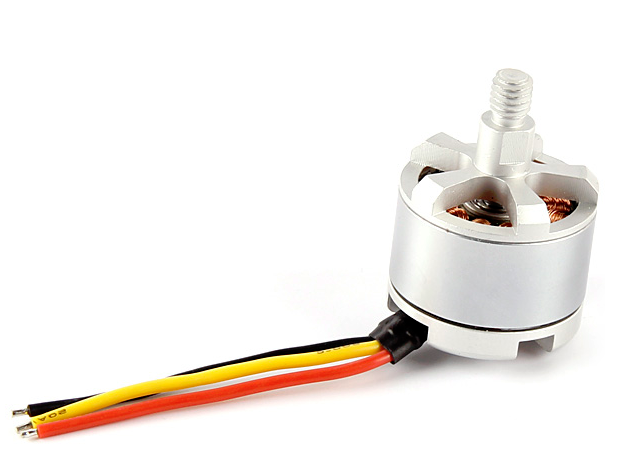
Motoren
Quadrocopter Cheerson CX-20 kan worden uitgerust met twee varianten van BC-motoren 2212 920KV / 1200KV. Voor een budget quadcopter is hun potentieel volledig genoeg.
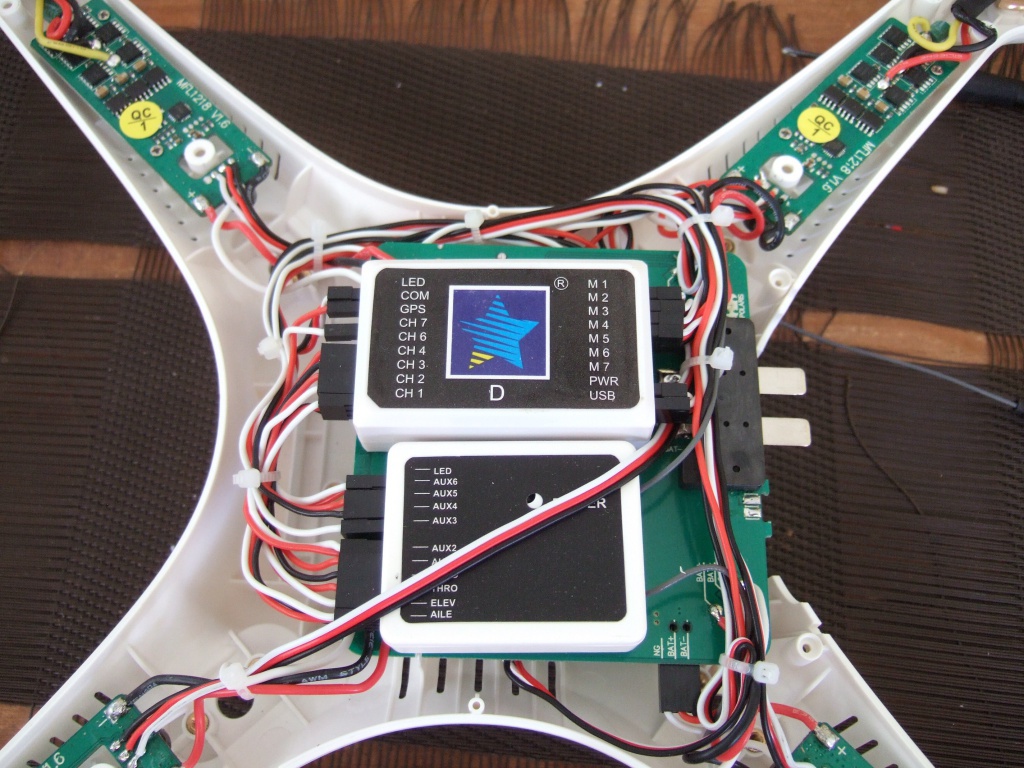
Vluchtcontroller
De Cheerson CX-20 quadcopter impliceert drie versies van de vluchtcontroller:
- Open Source stelt de piloot in staat om het volledige potentieel van de ArduPilot-controller en stuurautomaat te gebruiken via MissionPlanner-software dankzij open source-code.
- ZERO - ontwikkeld op een 32-bits AMR STM32F103 RBT6-chip, er is geen mogelijkheid om controllerbediening toe te voegen, het is niet compatibel met MissionPlanner-software en heeft dienovereenkomstig beperkte autonome vluchtmogelijkheden.
- Big Fly Shark- een complete versie van de controller ontwikkeld op basis van de STM32F103-chip, werkt met eigen software.

De open versie van de controller - "Open Source" via de vooraf geïnstalleerde software "MissionPlanner" stelt u in staat om de tune de vluchtcontroller en breidt de mogelijkheden van de quad aanzienlijk uit, bijvoorbeeld de modus "Fly to points" wordt actief.
Vliegprestaties
In de Cheerson CX-20-test toonde het zelfverzekerde stuwkracht die kenmerkend is voor budget drones op BC-motoren... Het heeft een aanzienlijke gangreserve, relatief stabiel, het werk van de elektronica als geheel beïnvloedt. Door de grote windvang vliegt de quad niet graag bij winderig weer, hier dient u rekening mee te houden!

Vluchtmodi
De Cheerson CX-20 heeft 5 vluchtmodi.
- Opstijgen (of handmatig) - in deze modus is de piloot verantwoordelijk voor de beweging van de drone (zonder binding aan GPS), als je de sticks loslaat, drone begint te dalen.
- GPS vasthouden - positie vasthouden modus. In deze modus, als je de sticks loslaat tijdens de vlucht, zal de drone zweven en autonoom zijn hoogte behouden (beginners zullen dit waarderen). Deze modus is ook relevant voor FPV-vluchten.
- Oriëntatie - deze modus schakelt de oriëntatie van de drone in de ruimte uit, de modus is relevant voor beginners (analoog aan Headless-modus) .
- Hoogte vasthouden - hoogte vasthouden modus, in tegenstelling tot de "GPS vasthouden" modus, houdt alleen de hoogte vast (vereist de deelname van de piloot om bijvoorbeeld de verschuiving te regelen, tegen de wind in), is relevant voor het filmen...
- RTH (terug naar huis) - de klassieke modus van terugkeer naar het startpunt, geactiveerd met de tuimelschakelaar op de zender, het terugkeren van de quad zal een automatische landing uitvoeren.
Dankzij de "Autopilot"-functie keert de CX-22 automatisch terug naar de startlocatie en in het geval van communicatieverlies tussen het vliegtuig en de zender. een zachte landing uitvoeren, gevolgd door het uitschakelen van de motoren.
Het is de moeite waard om te overwegen dat de drone terugkeert in plaats van opstijgt en een autonome landing uitvoert met een fout (1,5 - 2 meter), anders dreigt de piloot te crashen de quadrocopter, bijvoorbeeld over een paal die bij het startpunt staat, enz. Ook is het beter om vanaf een absoluut vlakke ondergrond op te stijgen, omdatdit beïnvloedt de nauwkeurigheid van toekomstige RTH-landingen.
Batterij
De Cheerson CX-20 quadcopter is uitgerust met een 3S 11.1V 2700mAh 20-40C LiPo-batterij (met XT60-connector). In de test leverde het een ononderbroken vlucht op van ongeveer 15 minuten (zonder camera) en ongeveer 10 minuten met camera aan boord. Volledige oplaadtijd 60 minuten.

In het batterijcompartiment kunt u een batterij plaatsen met een capaciteit tot 4000mAh, wat de vliegtijd met 3-5 minuten zal verlengen.
Zender
De Cheerson CX-20 quadrocopter is uitgerust met een goede 4-kanaals zender (regelapparatuur) die werkt op een frequentie van 2,4 GHz. Biedt een bereik van maximaal 1 km in veldomstandigheden. Stroom wordt geleverd door 8 × AA (apart verkrijgbaar).
![]()
![]()
![]()
Prijs
Op verschillende handelsvloeren internet, de prijs voor de Cheerson CX-20 Pathfinder begint bij$225.

Uitgang

Voordelen
- Prijs
- GPS-module
- Vluchtmodi
- Auto-return met landing (met verlies van communicatie en zwakke batterijlading
- Bediening
- Failsafe
- Vliegbereik
- Aangepast aan GoPro-camera's
- Prijs
Nadelen
- Vereist fijnafstelling van de controller voor correcte vlucht
- Vliegt niet graag bij winderig weer
- Niet in camerakit
Optimale prijs-kwaliteitverhouding. De Cheerson CX-20 Auto Pathfinder quadcopter zal meer gewaardeerd worden door gevorderde piloten die graag experimenteren met de instellingen van de vluchtcontroller. Als eerste UAV om te filmen is hij op het laatste moment geschikt. Het belangrijkste doel van de quad is fotografie / videofilmen (onder voorbehoud van aanpassing met een goede camera, gekoppeld aan een mechanische twee- of drieassige gimbal). Leeftijdsgrens 14.
Foto
Foto met Cheerson CX-20 quadrocopter.



![]()
Video
Video met Cheerson CX-20 quadrocopter.
.






