소개
얼마 전 CheersonCX-10
기능
- 브러시리스 모터
- 오픈 소스 컨트롤러
- GPS 모듈
- 최대 범위 1km
- GoPro 카메라용 짐벌
- IOC(Intelligent Orientation System)
- 자동 조종 장치
- 비행 모드
- 이륙 대신 자동 복귀 이후 착륙(통신 두절/배터리 부족 시)
- LED 백라이트

옵션
- Quadcopter Cheerson CX-20 Auto Pathfinder
- 배터리 3S 11.1V 2700mAh 20-40C LiPo 30Wh(XT60 커넥터 포함)
- 하드웨어 제어 CX20(4개의 "AA" 1.5V 전원 공급, 별도 구매)
- 카메라용 짐벌(고무 짐벌 완충기가 안정화 역할을 하며 GoPro 카메라에 적합함)
- 배터리 충전기
- 충전기용 전원 공급 장치
- 4 × 메인 나사
- 2 × 장착 다리
- 패스너
- 도구
- 지침 CD(디지털 지침)

사양
외관





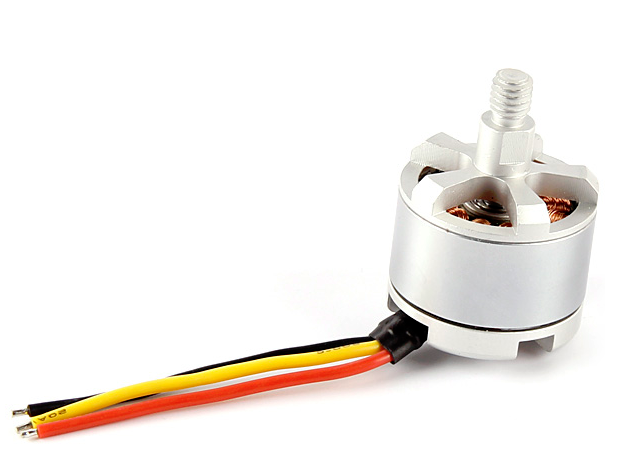
모터
Quadrocopter Cheerson CX-20 에는 BC 모터 2212 920KV / 1200KV의 두 가지 변형이 장착될 수 있습니다. 저예산 쿼드콥터의 경우 잠재력은 충분합니다.
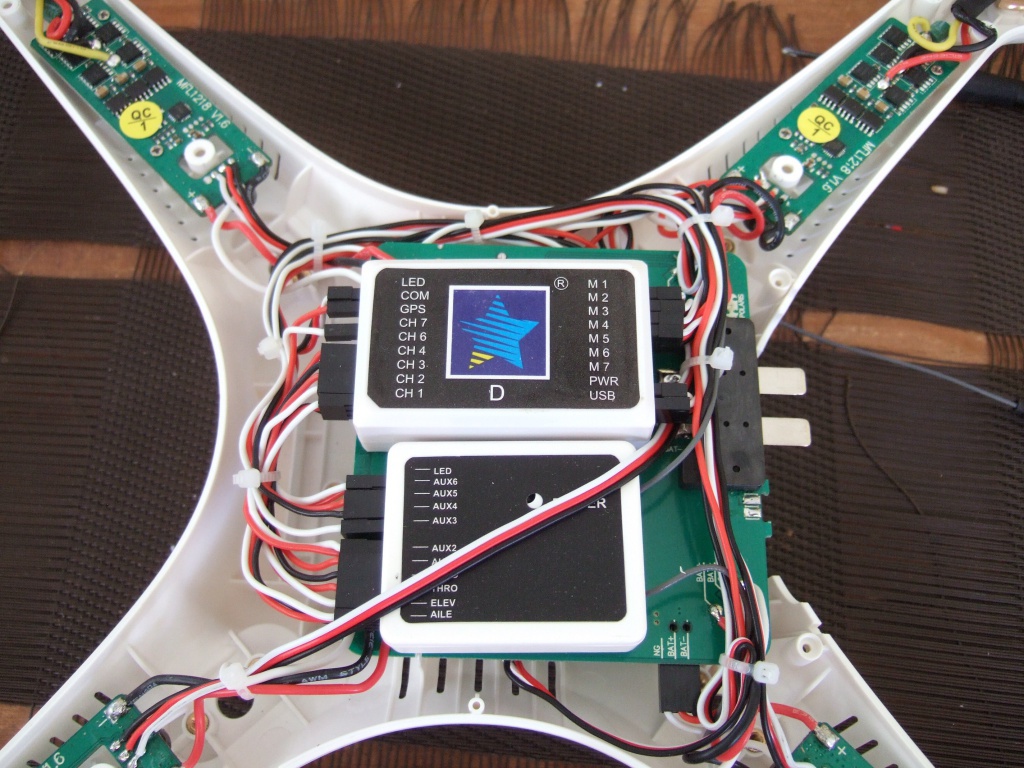
비행 컨트롤러
Cheerson CX-20 쿼드콥터는 비행 컨트롤러의 세 가지 버전을 의미합니다.
- 오픈 소스 는 파일럿이 오픈 소스 코드 덕분에 MissionPlanner 소프트웨어를 통해 ArduPilot 컨트롤러와 자동 조종 장치의 잠재력을 최대한 활용할 수 있도록 합니다.
- ZERO - 32비트 AMR STM32F103 RBT6 칩에서 개발되었으며 컨트롤러 작업을 추가할 가능성이 없으며 MissionPlanner 소프트웨어와 호환되지 않습니다. 따라서 자율 비행 능력이 제한적입니다.
- Big Fly Shark- STM32F103 칩을 기반으로 개발된 컨트롤러의 완전한 버전은 자체 소프트웨어와 함께 작동합니다.

사전 설치된 소프트웨어 "MissionPlanner"를 통해 "오픈 소스" 컨트롤러의 공개 버전을 사용하면 비행 컨트롤러를 조정하고 쿼드의 기능을 크게 확장합니다. 예를 들어 "Fly to Points" 모드가 활성화됩니다.
비행 성능
Cheerson CX-20 테스트에서 예산의 자신감 넘치는 추력 특성을 보였다 BC 모터의 드론... 그것은 상당한 파워 리저브를 가지고 있으며 상대적으로 안정적이며 전자 제품의 작업이 전체적으로 영향을 미칩니다. 큰 바람으로 인해 쿼드는 바람이 부는 날씨에 비행하는 것을 좋아하지 않으므로 이것을 고려해야합니다!

비행 모드
Cheerson CX-20에는 5가지 비행 모드가 있습니다.
- 이륙(또는 수동) - 이 모드에서 조종사는 드론의 움직임을 담당합니다(GPS에 바인딩되지 않음). 스틱을 놓으면 드론이 하강하기 시작합니다.
- GPS 홀드 - 위치 홀드 모드. 이 모드에서 비행 중 스틱을 놓으면 드론이 자동으로 호버링하고 고도를 유지합니다(초보자는 인정). 이 모드는 FPV 비행에도 적용됩니다.
- Orientation - 이 모드는 공간에서 드론의 방향을 비활성화하며, 이 모드는 초보자와 관련이 있습니다(헤드리스 모드와 유사) .
- 고도 유지 - "GPS 유지" 모드와 달리 고도 유지 모드는 고도만 유지합니다(예: 이동을 제어하려면 조종사의 참여가 필요합니다., 바람을 향하여), 촬영에 적합합니다...
- RTH (return to home) - 이륙 지점으로 돌아가는 고전적인 모드, 송신기의 토글 스위치에서 활성화되고 쿼드를 반환하면 자동 착륙이 수행됩니다.
"Autopilot" 기능 덕분에 기체와 송신기 간의 통신이 두절된 경우 CX-22는 자동으로 이륙 위치로 돌아가고 연착륙을 수행한 후 모터를 종료합니다.
드론이 이륙 대신 복귀하고 오차(1.5~2m)로 자율 착륙을 수행한다는 사실을 고려할 가치가 있습니다. 그렇지 않으면 조종사가 추락할 위험이 있습니다 예를 들어 이륙 지점에 기둥이 서 있는 것과 같은 쿼드로콥터 등. 절대적으로 평평한 표면에서 이륙하는 것이 더 낫습니다. 왜냐하면이는 향후 RTH 착륙의 정확도에 영향을 미칩니다. Cheerson CX-20 쿼드콥터에는 3S 11.1V 2700mAh 20-40C LiPo 배터리(XT60 커넥터 포함)가 장착되어 있습니다. 테스트에서는 카메라 없이 약 15분(카메라 없이), 카메라를 탑재한 상태에서 약 10분간 연속 비행을 제공했다. 완전 충전 시간 60분.
배터리 수납칸에는 최대 4000mAh 용량의 배터리를 장착할 수 있어 비행 시간이 3-5분 정도 늘어납니다.
송신기
Cheerson CX-20 쿼드로콥터에는 2.4의 주파수에서 작동하는 우수한 4채널 송신기(제어 장비)가 장착되어 있습니다. GHz. 필드 조건에서 최대 1km의 범위를 제공합니다. 전원은 8 × AA(별매)에서 공급됩니다.
가격
다양한 거래 층에서 인터넷에서 Cheerson CX-20 Pathfinder의 가격은$225에서 시작합니다.

출력
장점
- 가격
- GPS 모듈
- 비행 모드
- 착륙 시 자동 복귀(통신 손실 포함) 및 약한 배터리 충전
- 제어
- Failsafe
- 비행 범위
- GoPro 카메라에 적용
- 가격
단점
- 올바른 비행을 위해 컨트롤러의 미세 조정이 필요
- 바람이 많이 부는 날씨에 비행하는 것을 좋아하지 않음
- 카메라 키트에 없음
가격대비 최적의 가치. Cheerson CX-20 Auto Pathfinder 쿼드콥터는 비행 컨트롤러 설정을 실험하고 싶어하는 고급 조종사에게 더 높이 평가될 것입니다. 최초의 촬영용 UAV로 최후의 순간에 적합합니다. 쿼드의 주요 목적은 사진/비디오 촬영입니다(기계식 2축 또는 3축 짐벌과 결합된 좋은 카메라로 개조해야 함). 연령 제한 14.
사진
Cheerson CX-20 쿼드로콥터로 찍은 사진.
)비디오
Cheerson CX-20 쿼드로콥터를 사용한 비디오.
.